Робочий орган транспортної системи
Номер патенту: 43010
Опубліковано: 15.11.2001
Автори: Ощипок Ігор Миколайович, Занічковська Любов Володимирівна
Формула / Реферат
1. Робочий орган транспортної системи, що складається з двигуна, силової передачі, ходової частими і кузова, який відрізняється тим, що рама, до якої закріплено кузов, укомплектована механізмом фіксації, який містить хрестовинні затискачі, пружини стискування, які встановлено з можливістю фіксування в гнізді квадратного перерізу пальця, прикріпленого до кузова.
2. Робочий орган транспортної системи по п. 1, який відрізняється тим, що пересування його здійснюється по рейковій колії під дією механізму керування.
3. Робочий орган транспортної системи но п. 1, який відрізняється тим, що кузов виконаний у формі ємкості або платформи.
4. Робочий орган транспортної системи по п. 1, який відрізняється тим, що розвантажувальний пристрійвстановлений з можливістю розмикання механізму фіксації і повернення його у попереднє положення після розвантаження.
5. Робочий орган транспортної системи по п. 1, який відрізняється тим, що він укомплектований датчиками маси, рівня і керування рухом на фотоелементах в можливістю використання інформації від вказаних датчиків при керуванні робочим органом.
Текст
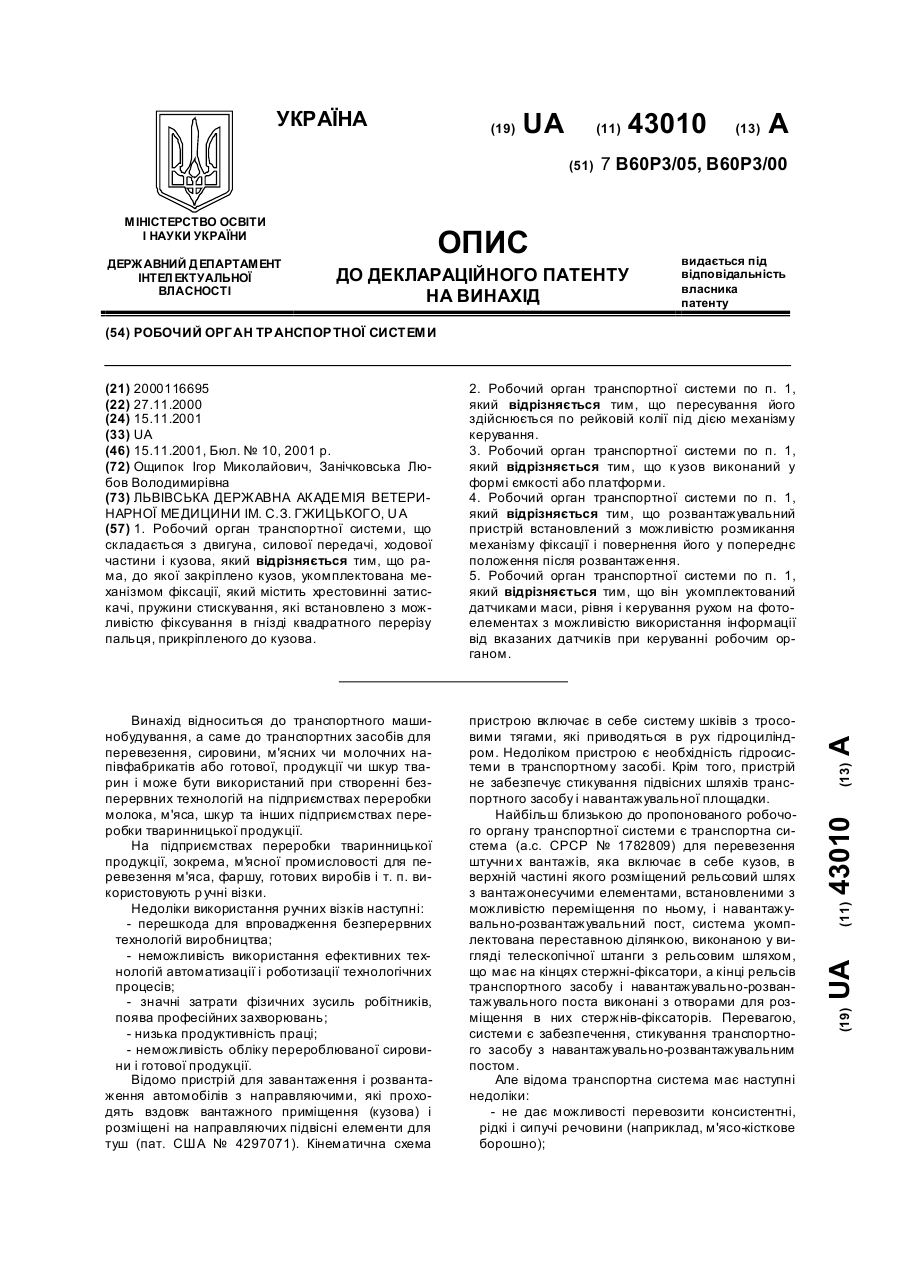
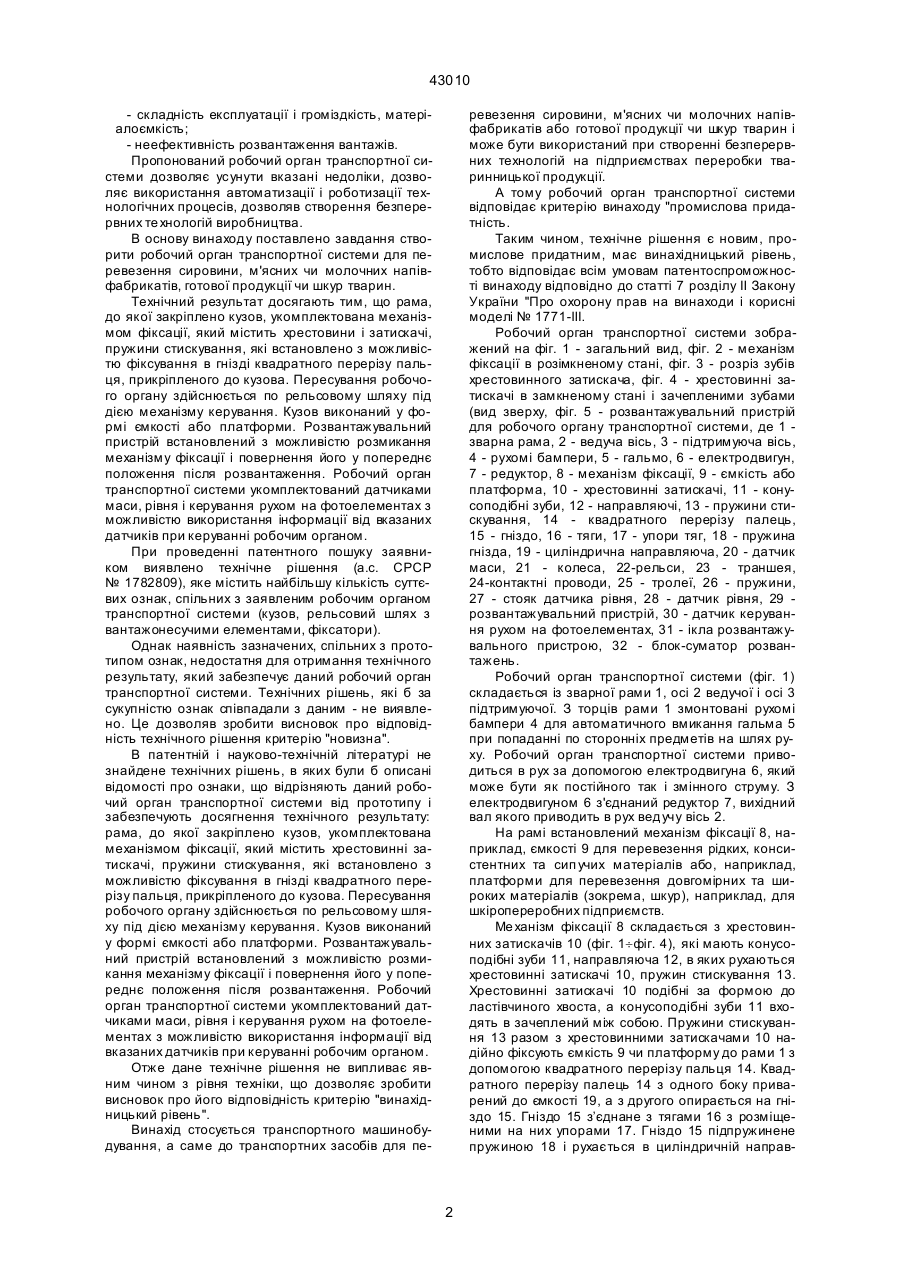
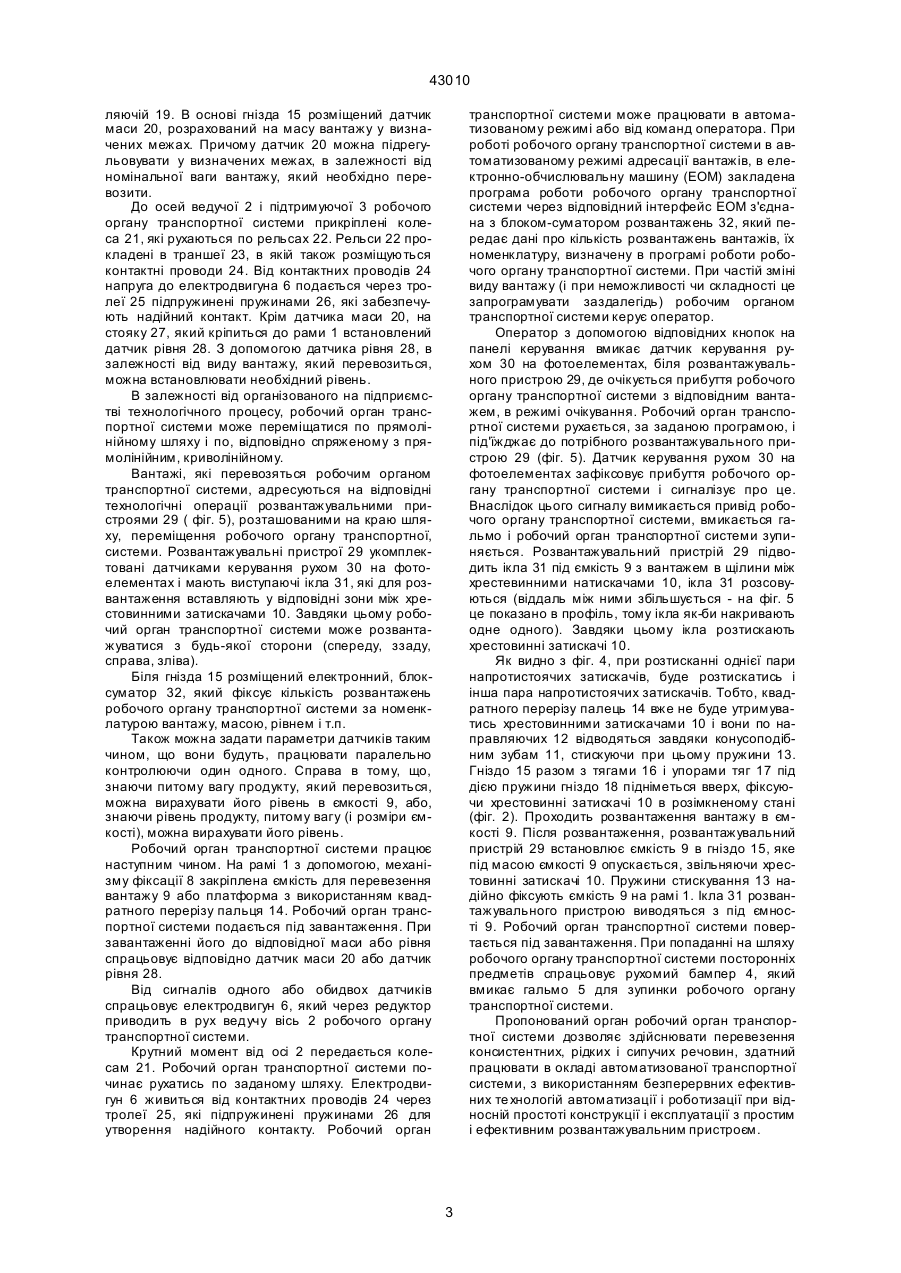
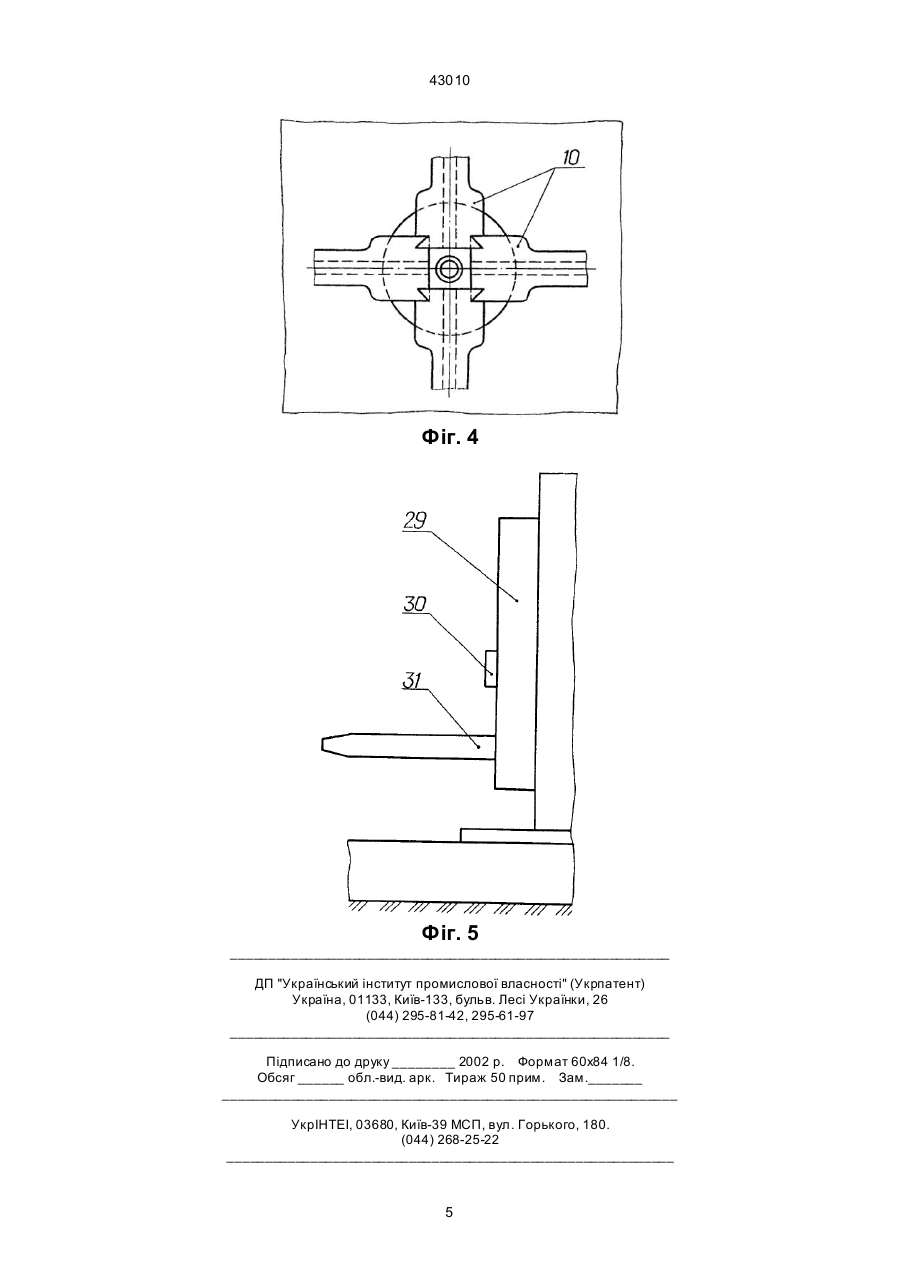
1. Робочий орган транспортної системи, що складається з двигуна, силової передачі, ходової частини і кузова, який відрізняється тим, що рама, до якої закріплено кузов, укомплектована механізмом фіксації, який містить хрестовинні затискачі, пружини стискування, які встановлено з можливістю фіксування в гнізді квадратного перерізу пальця, прикріпленого до кузова. 43010 - складність експлуатації і громіздкість, матеріалоємкість; - неефективність розвантаження вантажів. Пропонований робочий орган транспортної системи дозволяє усунути вказані недоліки, дозволяє використання автоматизації і роботизації технологічних процесів, дозволяв створення безперервних те хнологій виробництва. В основу винаходу поставлено завдання створити робочий орган транспортної системи для перевезення сировини, м'ясних чи молочних напівфабрикатів, готової продукції чи шкур тварин. Технічний результат досягають тим, що рама, до якої закріплено кузов, укомплектована механізмом фіксації, який містить хрестовини і затискачі, пружини стискування, які встановлено з можливістю фіксування в гнізді квадратного перерізу пальця, прикріпленого до кузова. Пересування робочого органу здійснюється по рельсовому шляху під дією механізму керування. Кузов виконаний у формі ємкості або платформи. Розвантажувальний пристрій встановлений з можливістю розмикання механізму фіксації і повернення його у попереднє положення після розвантаження. Робочий орган транспортної системи укомплектований датчиками маси, рівня і керування рухом на фотоелементах з можливістю використання інформації від вказаних датчиків при керуванні робочим органом. При проведенні патентного пошуку заявником виявлено технічне рішення (а.с. СPCP № 1782809), яке містить найбільшу кількість суттєвих ознак, спільних з заявленим робочим органом транспортної системи (кузов, рельсовий шлях з вантажонесучими елементами, фіксатори). Однак наявність зазначених, спільних з прототипом ознак, недостатня для отримання технічного результату, який забезпечує даний робочий орган транспортної системи. Технічних рішень, які б за сукупністю ознак співпадали з даним - не виявлено. Це дозволяв зробити висновок про відповідність технічного рішення критерію "новизна". В патентній і науково-технічній літературі не знайдене технічних рішень, в яких були б описані відомості про ознаки, що відрізняють даний робочий орган транспортної системи від прототипу і забезпечують досягнення технічного результату: рама, до якої закріплено кузов, укомплектована механізмом фіксації, який містить хрестовинні затискачі, пружини стискування, які встановлено з можливістю фіксування в гнізді квадратного перерізу пальця, прикріпленого до кузова. Пересування робочого органу здійснюється по рельсовому шляху під дією механізму керування. Кузов виконаний у формі ємкості або платформи. Розвантажувальний пристрій встановлений з можливістю розмикання механізму фіксації і повернення його у попереднє положення після розвантаження. Робочий орган транспортної системи укомплектований датчиками маси, рівня і керування рухом на фотоелементах з можливістю використання інформації від вказаних датчиків при керуванні робочим органом. Отже дане технічне рішення не випливає явним чином з рівня техніки, що дозволяє зробити висновок про його відповідність критерію "винахідницький рівень". Винахід стосується транспортного машинобудування, а саме до транспортних засобів для пе ревезення сировини, м'ясних чи молочних напівфабрикатів або готової продукції чи шкур тварин і може бути використаний при створенні безперервних технологій на підприємствах переробки тваринницької продукції. А тому робочий орган транспортної системи відповідає критерію винаходу "промислова придатність. Таким чином, технічне рішення є новим, промислове придатним, має винахідницький рівень, тобто відповідає всім умовам патентоспроможності винаходу відповідно до статті 7 розділу ІІ Закону України "Про охорону прав на винаходи і корисні моделі № 1771-ІІІ. Робочий орган транспортної системи зображений на фіг. 1 - загальний вид, фіг. 2 - механізм фіксації в розімкненому стані, фіг. 3 - розріз зубів хрестовинного затискача, фіг. 4 - хрестовинні затискачі в замкненому стані і зачепленими зубами (вид зверху, фіг. 5 - розвантажувальний пристрій для робочого органу транспортної системи, де 1 зварна рама, 2 - ведуча вісь, 3 - підтримуюча вісь, 4 - рухомі бампери, 5 - гальмо, 6 - електродвигун, 7 - редуктор, 8 - механізм фіксації, 9 - ємкість або платформа, 10 - хрестовинні затискачі, 11 - конусоподібні зуби, 12 - направляючі, 13 - пружини стискування, 14 - квадратного перерізу палець, 15 - гніздо, 16 - тяги, 17 - упори тяг, 18 - пружина гнізда, 19 - циліндрична направляюча, 20 - датчик маси, 21 - колеса, 22-рельси, 23 - траншея, 24-контактні проводи, 25 - тролеї, 26 - пружини, 27 - стояк датчика рівня, 28 - датчик рівня, 29 розвантажувальний пристрій, 30 - датчик керування рухом на фотоелементах, 31 - ікла розвантажувального пристрою, 32 - блок-суматор розвантажень. Робочий орган транспортної системи (фіг. 1) складається із зварної рами 1, осі 2 ведучої і оci 3 підтримуючої. З торців рами 1 змонтовані рухомі бампери 4 для автоматичного вмикання гальма 5 при попаданні по сторонніх предметів на шлях руху. Робочий орган транспортної системи приводиться в рух за допомогою електродвигуна 6, який може бути як постійного так і змінного струму. З електродвигуном 6 з'єднаний редуктор 7, вихідний вал якого приводить в рух ведучу вісь 2. На рамі встановлений механізм фіксації 8, наприклад, ємкості 9 для перевезення рідких, консистентних та сип учих матеріалів або, наприклад, платформи для перевезення довгомірних та широких матеріалів (зокрема, шкур), наприклад, для шкіропереробних підприємств. Ме ханізм фіксації 8 складається з хрестовинних затискачів 10 (фіг. 1¸фіг. 4), які мають конусоподібні зуби 11, направляюча 12, в яких рухаються хрестовинні затискачі 10, пружин стискування 13. Хрестовинні затискачі 10 подібні за формою до ластівчиного хвоста, а конусоподібні зуби 11 входять в зачеплений між собою. Пружини стискування 13 разом з хрестовинними затискачами 10 надійно фіксують ємкість 9 чи платформу до рами 1 з допомогою квадратного перерізу пальця 14. Квадратного перерізу палець 14 з одного боку приварений до ємкості 19, а з другого опирається на гніздо 15. Гніздо 15 з’єднане з тягами 16 з розміщеними на них упорами 17. Гніздо 15 підпружинене пружиною 18 і рухається в циліндричній направ 2 43010 ляючій 19. В основі гнізда 15 розміщений датчик маси 20, розрахований на масу вантажу у визначених межах. Причому датчик 20 можна підрегульовувати у визначених межах, в залежності від номінальної ваги вантажу, який необхідно перевозити. До осей ведучої 2 і підтримуючої 3 робочого органу транспортної системи прикріплені колеса 21, які рухаються по рельсах 22. Рельси 22 прокладені в траншеї 23, в якій також розміщуються контактні проводи 24. Від контактних проводів 24 напруга до електродвигуна 6 подається через тролеї 25 підпружинені пружинами 26, які забезпечують надійний контакт. Крім датчика маси 20, на стояку 27, який кріпиться до рами 1 встановлений датчик рівня 28. З допомогою датчика рівня 28, в залежності від виду вантажу, який перевозиться, можна встановлювати необхідний рівень. В залежності від організованого на підприємстві технологічного процесу, робочий орган транспортної системи може переміщатися по прямолінійному шляху і по, відповідно спряженому з прямолінійним, криволінійному. Вантажі, які перевозяться робочим органом транспортної системи, адресуються на відповідні технологічні операції розвантажувальними пристроями 29 ( фіг. 5), розташованими на краю шляху, переміщення робочого органу транспортної, системи. Розвантажувальні пристрої 29 укомплектовані датчиками керування рухом 30 на фотоелементах і мають виступаючі ікла 31, які для розвантаження вставляють у відповідні зони між хрестовинними затискачами 10. Завдяки цьому робочий орган транспортної системи може розвантажуватися з будь-якої сторони (спереду, ззаду, справа, зліва). Біля гнізда 15 розміщений електронний, блоксуматор 32, який фіксує кількість розвантажень робочого органу транспортної системи за номенклатурою вантажу, масою, рівнем і т.п. Також можна задати параметри датчиків таким чином, що вони будуть, працювати паралельно контролюючи один одного. Справа в тому, що, знаючи питому вагу продукту, який перевозиться, можна вирахувати його рівень в ємкості 9, або, знаючи рівень продукту, питому вагу (і розміри ємкості), можна вирахувати його рівень. Робочий орган транспортної системи працює наступним чином. На рамі 1 з допомогою, механізму фіксації 8 закріплена ємкість для перевезення вантажу 9 або платформа з використанням квадратного перерізу пальця 14. Робочий орган транспортної системи подається під завантаження. При завантаженні його до відповідної маси або рівня спрацьовує відповідно датчик маси 20 або датчик рівня 28. Від сигналів одного або обидвох датчиків спрацьовує електродвигун 6, який через редуктор приводить в рух ведучу вісь 2 робочого органу транспортної системи. Крутний момент від осі 2 передається колесам 21. Робочий орган транспортної системи починає рухатись по заданому шляху. Електродвигун 6 живиться від контактних проводів 24 через тролеї 25, які підпружинені пружинами 26 для утворення надійного контакту. Робочий орган транспортної системи може працювати в автоматизованому режимі або від команд оператора. При роботі робочого органу транспортної системи в автоматизованому режимі адресації вантажів, в електронно-обчислювальну машину (ЕОМ) закладена програма роботи робочого органу транспортної системи через відповідний інтерфейс ЕОМ з'єднана з блоком-суматором розвантажень 32, який передає дані про кількість розвантажень вантажів, їх номенклатуру, визначену в програмі роботи робочого органу транспортної системи. При частій зміні виду вантажу (і при неможливості чи складності це запрограмувати заздалегідь) робочим органом транспортної системи керує оператор. Оператор з допомогою відповідних кнопок на панелі керування вмикає датчик керування рухом 30 на фотоелементах, біля розвантажувального пристрою 29, де очікується прибуття робочого органу транспортної системи з відповідним вантажем, в режимі очікування. Робочий орган транспортної системи рухається, за заданою програмою, і під'їжджає до потрібного розвантажувального пристрою 29 (фіг. 5). Датчик керування рухом 30 на фотоелементах зафіксовує прибуття робочого органу транспортної системи і сигналізує про це. Внаслідок цього сигналу вимикається привід робочого органу транспортної системи, вмикається гальмо і робочий орган транспортної системи зупиняється. Розвантажувальний пристрій 29 підводить ікла 31 під ємкість 9 з вантажем в щілини між хрестевинними натискачами 10, ікла 31 розсовуються (віддаль між ними збільшується - на фіг. 5 це показано в профіль, тому ікла як-би накривають одне одного). Завдяки цьому ікла розтискають хрестовинні затискачі 10. Як видно з фіг. 4, при розтисканні однієї пари напротистоячих затискачів, буде розтискатись і інша пара напротистоячих затискачів. Тобто, квадратного перерізу палець 14 вже не буде утримуватись хрестовинними затискачами 10 і вони по направляючих 12 відводяться завдяки конусоподібним зубам 11, стискуючи при цьому пружини 13. Гніздо 15 разом з тягами 16 і упорами тяг 17 під дією пружини гніздо 18 підніметься вверх, фіксуючи хрестовинні затискачі 10 в розімкненому стані (фіг. 2). Проходить розвантаження вантажу в ємкості 9. Після розвантаження, розвантажувальний пристрій 29 встановлює ємкість 9 в гніздо 15, яке під масою ємкості 9 опускається, звільняючи хрестовинні затискачі 10. Пружини стискування 13 надійно фіксують ємкість 9 на рамі 1. Ікла 31 розвантажувального пристрою виводяться з під ємності 9. Робочий орган транспортної системи повертається під завантаження. При попаданні на шляху робочого органу транспортної системи посторонніх предметів спрацьовує рухомий бампер 4, який вмикає гальмо 5 для зупинки робочого органу транспортної системи. Пропонований орган робочий орган транспортної системи дозволяє здійснювати перевезення консистентних, рідких і сипучих речовин, здатний працювати в окладі автоматизованої транспортної системи, з використанням безперервних ефективних те хнологій автоматизації і роботизації при відносній простоті конструкції і експлуатації з простим і ефективним розвантажувальним пристроєм. 3 43010 Фіг. 1 Фіг. 2 Фіг. 3 4 43010 Фіг. 4 Фіг. 5 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюOperating unit of transport system
Автори англійськоюOschypok Ihor Mykolaiovych, Zanichkovs'ka Liubov Volodymyrivna
Назва патенту російськоюРабочий орган транспортной системы
Автори російськоюОщипок Игорь Николаевич, Заничковская Любовь Владимировна
МПК / Мітки
МПК: B60P 3/00
Мітки: робочий, орган, системі, транспортної
Код посилання
<a href="https://ua.patents.su/5-43010-robochijj-organ-transportno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Робочий орган транспортної системи</a>
Робочий орган гнучкого гвинтового конвеєра
Номер патенту: 28967
Опубліковано: 16.10.2000
Автори: Пік Андрій Іванович, Гевко Роман Богданович
МПК: B65G 33/26, B65G 33/16
Мітки: гнучкого, орган, робочий, конвеєра, гвинтового
Формула / Реферат:
1. Робочий орган гнучкого гвинтового конвейєра, що містить гнучкий вал, на якому секційно закріплені окремі гвинтові лопатки, який відрізняється тим, що гнучкий вал виконаний у вигляді П-подібних пружних пластин, жорстко закріплених між собою і зміщених одна відносно одної у коловому напрямку, причому між П-подібними пружними пластинами закріплені гвинтові лопатки.2. Робочий орган гнучкого гвинтового конвеєра по п. 1, який...
Робочий орган шнекового очисника коренеплодів
Номер патенту: 31505
Опубліковано: 15.12.2000
Автор: Павелчак Ольга Богданівна
МПК: A01D 33/08
Мітки: коренеплодів, шнекового, орган, очисника, робочий
Текст:
...перетині має вигляд полосовоі спіралі і закріплена до трубчатого валу а до ії зовнішньої по, верхні кріпиться робоча спіраль круглого поперечного перетину , діаметр якоі є більшим ніж товнина каркасноі полосовоі спіралі . Суттєві ознаки формули винаходу направлені на зменшення пош коджень коренеплодів за рахунок збільшення активної площі контак ту робоча поверхня - коренеплід. Робочий орган шнекового очисника коренеплодів зображений на...
Грунтообробний робочий орган
Номер патенту: 33960
Опубліковано: 15.02.2001
Автори: Сало Василь Михайлович, Шмат Сергій Іванович, Нех Олександр Володимирович, Сурік Віталій Анатолійович
МПК: A01B 35/20
Мітки: робочий, орган, грунтообробний
Текст:
...зміні пружності робочого органа. Таким чином, в результаті виконання стояка з двох частин та завдяки пружному елементу, що з'єднує ці частини стояка, забезпечується зниження енергетичних ви трат на обробіток грунту, що є метою даного винаходу. Джерела інформації. 1. Гапоненко B.C., Войтюк Д.Г. Сільськогосподарські машини, - 6-е вид., пер. і доп. - К.:Урожай, 1992. - С. 55-57 2. Пдоскоріз, опис винаходу до авт. Св. № 453147, 27.01.75 p. 3....
Робочий орган транспортера-подрібнювача
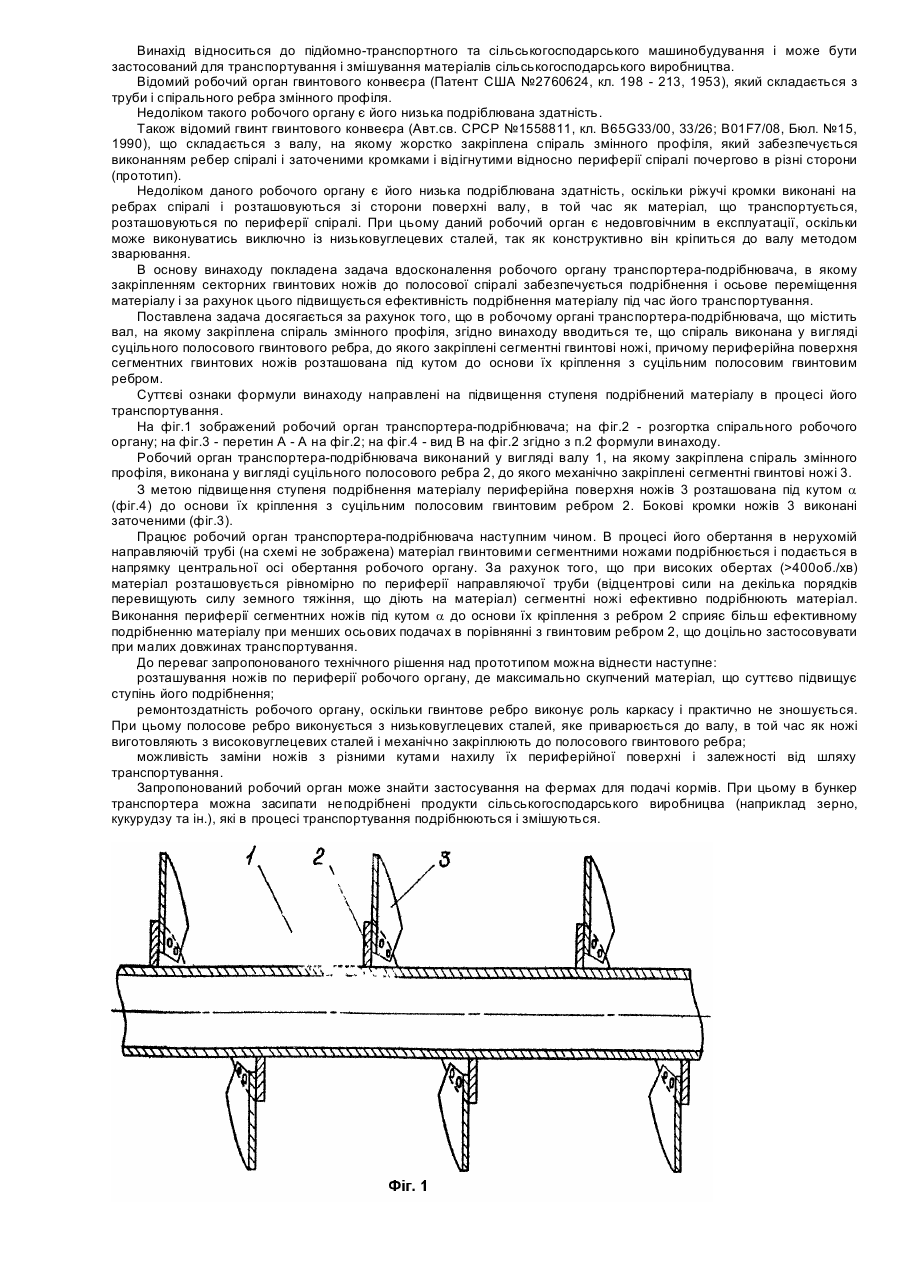
Номер патенту: 25584
Опубліковано: 30.10.1998
Автор: Вовк Ігор Зіновійович
МПК: B01F 7/08, B65G 33/26, B65G 33/16
Мітки: робочий, транспортера-подрібнювача, орган
Формула / Реферат:
1. Робочий орган транспортера-подрібнювача, що містить вал, на якому закріплена спіраль змінного профіля, який відрізняється тим, що спіраль виконана у вигляді суцільного полосового гвинтового ребра, до якого закріплені сегмєнтні гвинтові ножі.2. Робочий орган транспортера-подрібнювача за п.1, який відрізняється тим, що периферійна поверхня сегментних гвинтових ножів розташована під кутом до основи їх кріплення з суцільним полосовим...
Робочий орган очищувача коренеплодів
Номер патенту: 40288
Опубліковано: 16.07.2001
Автори: Занічковська Любов Володимирівна, Чайковський Борис Петрович, Лисий Володимир Аксентійович
МПК: A23N 12/00
Мітки: очищувача, орган, коренеплодів, робочий
Формула / Реферат:
І. Робочий орган очищувача коренебульбоплодів, що складаэться з эмкості, очищуючого механізму, миючої рідини і приводу, що приводить в рух миючу рідину з коренебульбоплодами, який відрізняэться тим, що в конічній эмкості встановлено диск активатора і пружні прутки з кульками з можливістю здійснення співударів з коренебульбоплодами.2. Робочий орган очищувача коренебульбоплодів по п. І, який відрізняється тим, що кульки на сусідних...
Попередній патент: Спосіб підготовки води для лікеро-горілчаного виробництва
Наступний патент: Лікувальний засіб “агмелгін”
Випадковий патент: Пристрій кульковий логопедичний поліфункціональний