Спосіб двоступеневої стабілізації постійного струму
Номер патенту: 43426
Опубліковано: 17.12.2001
Автори: Закревський Станіслав Іванович, Озерянський Анатолій Олександрович, Губаревич Володимир Миколайович, Білик Олександр Анатолійович
Формула / Реферат
1. Спосіб двоступеневої стабілізації постійного струму, при якому регулюючу дію в обох ступенях регулювання здійснюють взаємно - незалежно та одночасно, у другому ступені здійснюють безперервне регулювання, при якому прямо пропорційно відхиленням струму навантаження змінюють внутрішній опір регулюючого органа, який відрізняється тим, що на першому ступені випрямляють, а потім регулюють випрямлену напругу ключовим методом, стабілізуючи на мінімально можливому рівні напругу безпосередньо на регулюючому органі другого ступеня, яку при цьому вимірюють, потім порівнюють з еталонною, підсилюють сигнал різниці, після чого обернено пропорційно отримуваному сигналу формують сигнал керування регулюючим органом першого ступеня.
2. Спосіб за п. 1, який відрізняється тим, що на першому ступені випрямляють, а потім регулюють випрямлену напругу ключовим методом, підвищуючи в n раз у порівнянні з напругою навантаження напругу безпосередньо на регулюючому органі другого ступеня, при цьому вимірюють обидві ці напруги, потім порівнюють їх, підсилюють сигнал різниці в n раз, після чого обернено пропорційно отримуваному сигналу формують сигнал керування регулюючим органом першого ступеня, причому наперед задають число n максимально можливим із умови забезпечення функціонування при мінімальному опорі навантаження.
Текст
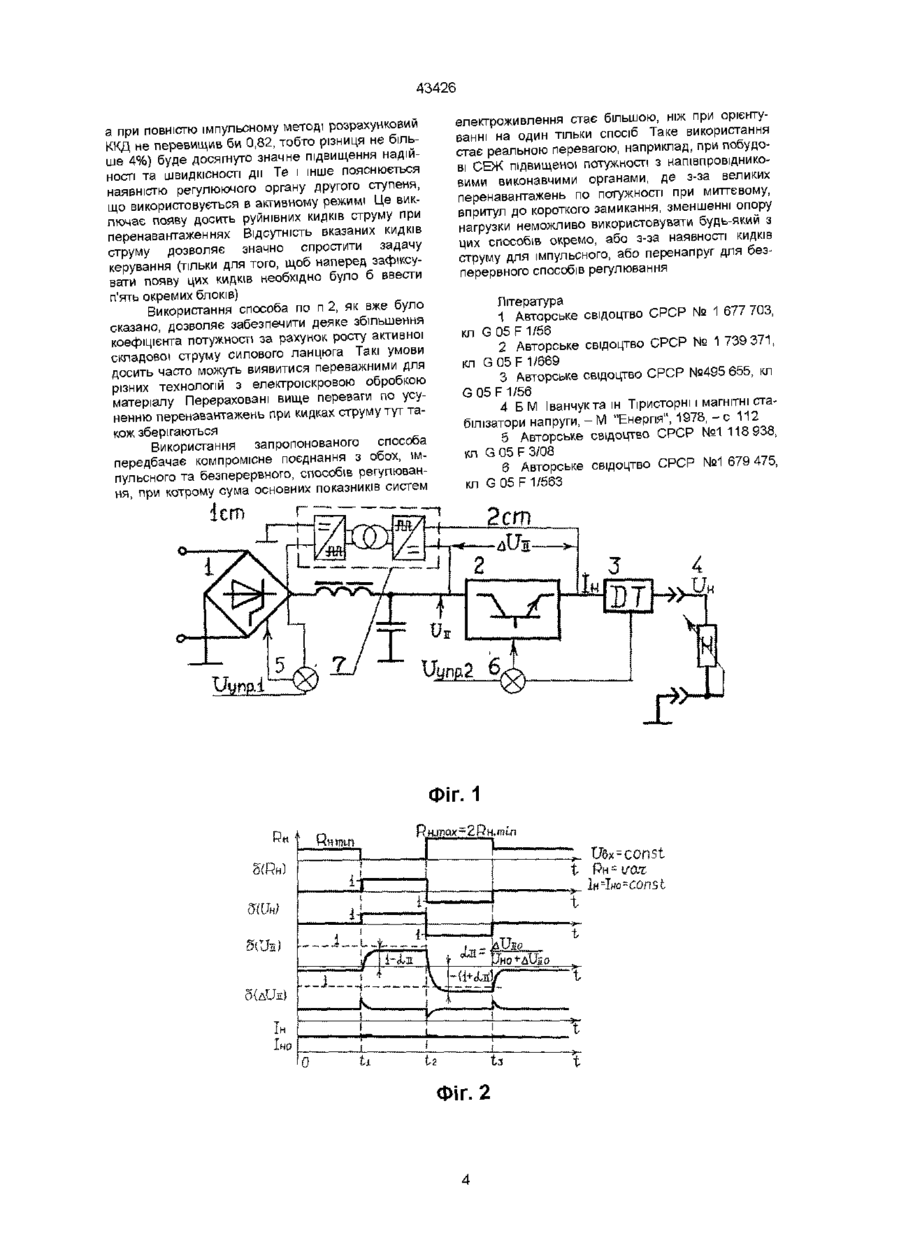
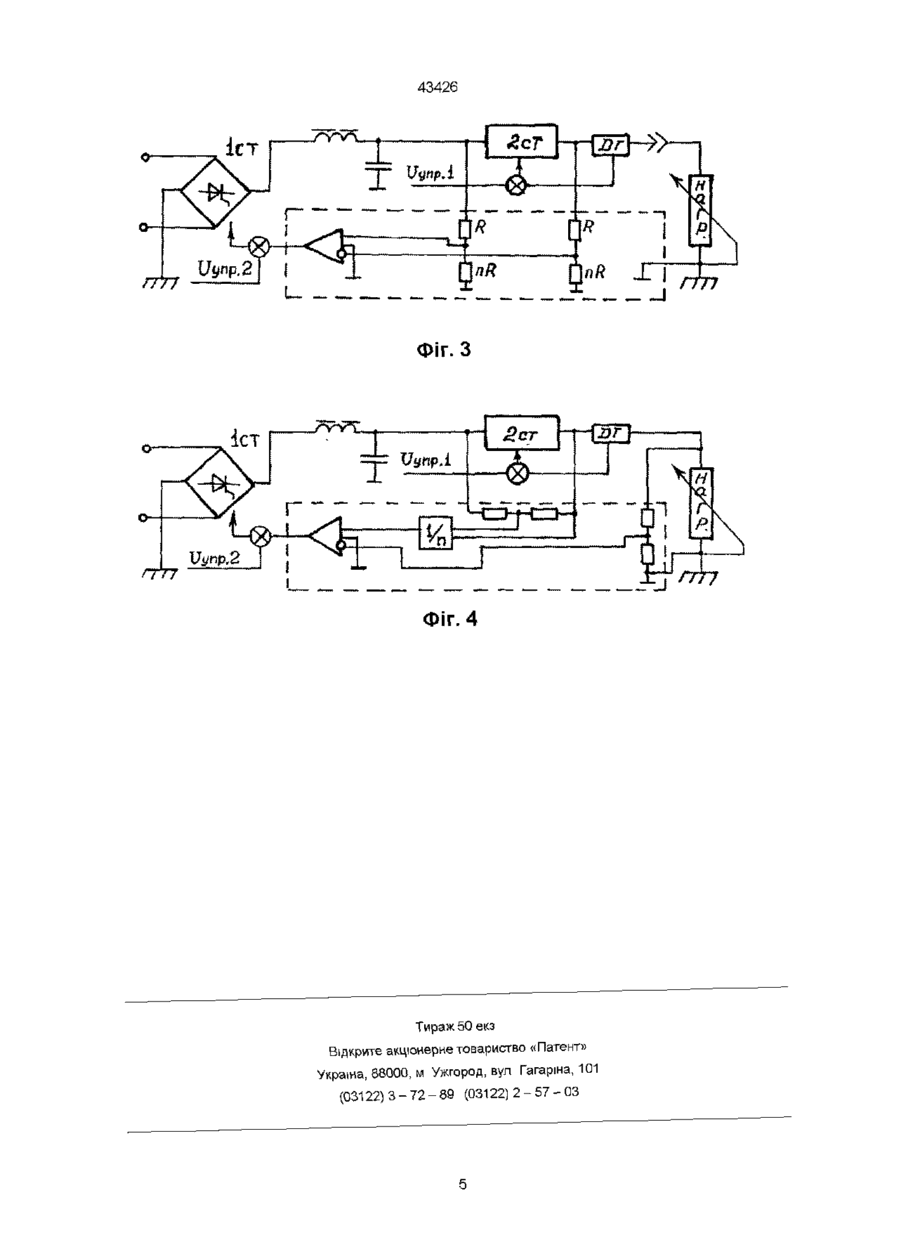
1 Спосіб двоступеневої стабілізації постійного струму, при якому регулюючу дію в обох ступенях регулювання здійснюють взаємно-незалежно та одночасно, у другому ступені здійснюють безперервне регулювання, при якому прямо пропорційно відхиленням струму навантаження змінюють внутрішній опір регулюючого органа, який відрізняється тим, що на першому ступені випрямляють, а потім регулюють випрямлену напругу ключовим методом, стабілізуючи на мінімально можливому рівні напругу безпосередньо на регулюючому органі другого ступеня, яку при цьому вимірюють, потім порівнюють з еталонною, підсилюють сигнал різниці, після чого обернено пропорційно отримуваному сигналу формують сигнал керування регулюючим органом першого ступеня 2 Спосіб за п 1, який відрізняється тим, що на першому ступені випрямляють, а потім регулюють випрямлену напругу ключовим методом, підвищуючи в п раз у порівнянні з напругою навантаження напругу безпосередньо на регулюючому органі другого ступеня, при цьому вимірюють обидві ці напруги, потім порівнюють їх, підсилюють сигнал різниці в п раз, після чого обернено пропорційно отримуваному сигналу формують сигнал керування регулюючим органом першого ступеня, причому наперед задають число п максимально можливим із умови забезпечення функціонування при мінімальному опорі навантаження О Винахід відноситься до електротехніки і може бути використаний у перетворювальній техніці, зокрема, для систем електроживлення (СЕЖ) ВІДОМІ способи багатоступеневої та зонної стабілізації струму, у ВІДПОВІДНОСТІ ДО ЯКИХ В різних межах зміни вхідної напруги здійснюється перехід на різні ланки регулюючого органу (1), або наперед встановлюються різні уставки на струм спрацьовування (2) Недоліком даних способів є низький ККД, великі втрати потужності на регулюючому елементі, і, ВІДПОВІДНО, низька надійність ВІДОМІ способи стабілізації струму з імпульсною дією регулюючого органу (3,4,5), використання яких дає можливість підвищити ККД та зменшити втрати потужності, однак супроводжується появою нових недоліків, таких як зниження коефіцієнта потужності, підвищення рівня електромагнітних перешкод, викликаючих низький рівень забезпечення електромагнітної сумісності, та зниження надійності, особливо в частині захисту від перевантажень по струму З відомих способів найбільш близьким до запропонованого є спосіб двоступеневої стабілізації постійного струму, що засновується на поєднанні дискретного (в літературі також часто ви Зоя користовують термін "ступінчатого") регулювання на першій та безперервного на другій ступінях Прикладом реалізації цього способа є стабілізатор по авторському свідоцтву СРСР № 1 679 475 (6) При використанні даного способа регулююча дія в обох ступенях регулювання відбувається взаємнонезалежно і одночасно, на другій ступіні здійснюють безперервне регулювання, при якому прямо пропорційно відхиленням струму нагрузки змінюють внутрішній опір регулюючого органу Використана в прототипі взаємодія між обома ступенями викликала появу таких недоліків зниження ШВИДКІСНОСТІ дії через подовження (функціонально) ланцюга зворотнього зв'язку, значного ускладнення (з'явилось, як мінімум шість нових вузлів, та знадобилось застосування дуже складного дорогого трансформаторно-тіристорного стабілізатора дискретної дії), і, сумарно, зниження надійності СЕЖ, що реалізуються за цим способом Задачею запропонованого технічного рішення є створення такого способа двоступеневої стабілізації постійного струму, у якому шляхом об'єднання операцій випрямлення та регулювання напруги ключовим методом на першому ступені регу (О ^ со 43426 лювання та перехресного керування (тобто такого, при якому дія регулюючого органу першого ступеня здійснюється по сигналу зміни напруги на регулюючому органі другого) регулюючим органом першого ступеня досягається пдвищення швидкісності дії, надійності і спрощення способа при технічній реалізації Поставлена задача досягається тим, що спосіб двоступеневої стабілізації постійного струму, при якому регулюючу дію в обох ступенях регулювання здійснюють взаємно-незалежно і одночасно, у другому ступені здійснюють безперервне регулювання, при якому прямо пропорційно відхиленням струму нагрузки змінюють внутрішній опір регулюючого органа, додається тим, що на першому ступені випрямляють, а потім регулюють випрямлену напругу ключовим методом, стабілізуючи при цьому на мінімально можливому рівні напругу на регулюючому органі другого ступеня, при цьому вимірюють напругу на регулюючому органі другого ступеня, потім порівнюють її з еталонною, підсилюють сигнал різниці , і обернено-пропорційно сигналу, що одержується, формують сигнал керування регулюючим органом першого ступеня Можливо окремо виділити таку модифікацію способа, при якій буде забезпечений максимальний коефіцієнт потужності (термін "максимальний" застосовується тут тільки по відношенню до можливостей даного способа) Для умов отримання максимального коефіцієнта потужності поставлена задача досягається іншою ПОСЛІДОВНІСТЮ, при якій на першому ступені випрямляють, а потім регулюють випрямлену напругу ключовим методом, підвищуючи в п раз у порівнянні з напругою на нагрузці напругу на регулюючому органі другого ступеня, при цьому вимірюють обидві ці напруги, порівнюють їх, підсилюють сигнал різниці в п разів і оберненопропорційно сигналу, що отримується, формують сигнал керування регулюючим органом першого ступеня, причому наперед встановлюють число п максимально можливим з умови забезпечення функціонування при мінімальному опорі нагрузки Запропоноване технічне рішення по обох пунктах формули зберігає всі позитивні якості відомого способа і в значній мірі усуває його недоліки, втому числі - суміщення операцій випрямлення та регулювання напруги у регулюючому органі першого ступеня дозволяє за рахунок виключення з силового ланцюга окремого виконавчого органу (в прототипі використаний дуже складний, багатоелементний трансформаторно-тіристорний регулятор) підвищити ШВИДКІСТНІСТЬ дії та надійність і добитися спрощення способа при технічній реалізації, - використання ключового широтно-імпульсного регулювання у першому ступені замість релейно-імпульсного дало можливість через виключення задачі керування трансформаторно-тіристорним регулятором в ще більшій мірі забезпечити спрощення при технічній реалізації, - введення перехресного керування дало можливість виключити часові втрати в проміжних контурах і в ще більшій мірі підвищити швидкісНІСТЬ Дії На фіг 1 і фіг 2 приведені, ВІДПОВІДНО, типова структурна побудова і графіки зміни параметрів в основних вузлах СЕЖ, реалізуючих запропонований спосіб, на фіг 3 і фіг 4 приведені структурні побудови СЕЖ, у яких запропонований спосіб може бути реалізований більш специфічно, в тому числі з максимальним ККД (СЕЖ на фіг 3, формула винаходу по п 1), і з максимальним коефіцієнтом потужності (СЕЖ на фіг 4, формула винаходу по п 2) Прийняті наступні позначки та скорочення (фіг 1) 1 і 2 - виконавчі органи першого та другого ступеней регулювання (1 ст, 2 ст), 3 - датчик струму (DT), 4 - нагрузка (Н), 5 та 6 - вузли порівняння та підсилення сигналів зворотнього зв'язку, -®-, ВІДПОВІДНО першого та другого ступеней, 7 вузол перетворення вимірювального сигналу на вході ланцюга зворотнього зв'язку першого ступеня (на малюнку умовно показано, що в середині відбувається модуляція ня - С ), трансформуван• ) та демодуляція ( ) сигналу, на фіг 3 та фіг 4 цей вузол не приводиться), UBX напруга на вході, ІІц - напруга на виході першого ступеня, ДІІц - напруга безпосередньо на регулюючому органі другого ступеня, AUnmm - мінімально допустима напруга на регулюючому органі другого ступеня безпосередньо, и к е р і - напруга керування першим ступенем, и к е р і - напруга керування другим ступенем, UH - напруга на нагрузці, ин-струм нагрузки, RH,RH m - опір нагрузm ки та найменше його значення ВІДПОВІДНО Перший та другий ступені регулювання, 1 та 2, включені у розсічку між входом і нагрузкою, причому другий ступінь - послідовно з нагрузкою Вимірювання струму нагрузки здійснюється за допомогою датчика 3, що також включений в ланцюг нагрузки 4, а наступні порівняння та підсилення - за допомогою вузла 5 Операції вимірювання, порівняння та підсилення в ланцюзі керування першого ступеня регулювання реалізуються в вузлі 6, що включений між регулюючим органом другого ступеня та керуючим входом першого, причому для забезпечення гальванічної розв'язки в розсічку цього ланцюга може бути включений вузол 7 Спосіб реалізується в наступній ПОСЛІДОВНОСТІ На першому ступені регулювання здійснюється випрямляння та регулювання випрямленої напруги ключовим методом, а на другому ступені - стабілізація струму нагрузки за допомогою зміни внутрішнього опору регулюючого органу цього ступеня (безперервне регулювання) Функціонування обох ступеней здійснюється одночасно та взаємно-незалежно, але при цьому зміни напруги на регулюючому органі другого ступеня, ДІІц, контролюються дією першого ступеня При цьому внутрішній опір регулюючого органу другого ступеня 2 змінюється прямо пропорційно відхиленням струму нагрузки, у результаті чого змінюється напруга ДІІц В ланцюзі зворотнього зв'язку першого ступеня 5 та 7, напругу спершу вимірюють, потім порівнюють з еталонною керуючою напругою и к е р і, підсилюють сигнал різниці і обернено пропорційно отриманому сигналу керування здійснюють ключовим методом регулювання напруги на виході першого ступеня, тобто на вході другого, 43426 ІІЦ, а отже і на регулюючому органі останньої ДІ)ц Тут перераховані загальні для обох послідовностей операції та алгоритм їх здійснення ВІДМІННОСТІ МІЖ ними визначаються в залежності від вказаних раніше конкретних задач і проявляються в формі контролю напруги ДІ)ц Для задачі отримання максимального ККД забезпечується стабілізація ДІ)ц, причому на мінімально допустимому рівні, тобто ДІІц =const = AUiimm Вибір AUiimm залежить ВІД допуска на ДІІц при перевантаженнях по струму, що виникають при стрибкоподібній ЗМІНІ опору нагрузки, наприклад при короткому замиканні (RH = R H mm), ДЄ При ЦЬОМу МЗЄ буТИ ЗЭДЭНИЙ ДЄЯКИЙ запас для ДІІптт > 0 Для задачі отримання максимального коефіцієнта потужності, п 2 формули, необхідно виконання двох умов а у частці отримання власне коефіцієнта потужності, б у частці забезпечення стабілізації струму при максимальному опорі нагрузки Обидві умови будуть виконуватися при такому алгоритмі керування, коли для всього діапазону Епюри напруг приведені на фіг 2, причому для зручності процеси аналізуються при умові незмінної вхідної напруги (U BX - const) і змінного опору нагрузки (RH = var) При інших варіантах (RH = const та UBX = var, або RH = var та UBX = var) процеси аналогічні і не мають протирічч щодо приведеного переліку основних операцій На чотирьох інтервалах часу 0 - t i , t|-t2, h~h, t> h опір нагрузки приймає ЗНачеННЯ RH m 0 R H m x = 2RH mm, RH m РеШТЭ m a m величин подані у приведеному вигляді, в т ч ДІІірп-ІІн, де вибір коефіцієнта п не порушить виконання ОбОХ УМОВ, В ТОМУ ЧИСЛІ ВИбір Птш буде здійснений з умови (а), а п т а х - з умови (б) Позначаючи активну складову опору всього силового тракту випрямляч-фільтр-стабілізатор через Rc, а реактивну - через Хс, (тут досить врахувати дроссель фільтра), коефіцієнт потужності можна отримати в наступного співвідношення OlKHr _7Г U\ VHO+&VBO де L n - Uii (RH mm), a AUno - const - падіння наJo пруги на регулюючому елементі другої ступені при монотонних (не перехідних) режимах, і При вказаних стрибкоподібних змінах RH, так само стрибкоподібно змінюється напруга на нагрузці 5(UH) 3 деяким запізненням, що визначається постійною часу тракту зворотнього зв'язку по ланцюгу другого ступеня, змінюється внутрішній опір регулюючого органу другого ступеня (частково це відображається у графіку для 5(1111), і з ще більшим запізненням, що визначається вже сумою постійних часу ланцюгів обох ступеней, змінюється напруга ДІ)ц, див 5 (11ц) По змінам останньої вже можливо робити оцінку ШВИДКІСНОСТІ дії системи, а з нею і основного показника системи - міру нестабільності струму Ін = const Для того, щоб відхилення останнього були в заданих межах, тобто коли ДІн < необхідно у ВІДПОВІДНИХ межах забезпечити співвідношення між загальним коефіцієнтом підсилення всієї системи регулювання Ко та частковими коефіцієнтами підсилення аі, аи та постійними часу Рі, Ри тракторів зворотніх зв'язків (~Шл Забезпечення цієї умови є задачею вже конкретних пристроїв (наприклад, для того щоб забезпечити необхідний коефіцієнт підсилення аі дуже зручно наперед задати коефіцієнт поділу у вимірювальному ланцюгу, див R-nR на фіг 3) Другою умовою забезпечення співвідношення Є ВИбір ДОПУСКІВ НЭ RH max), Ян + Rc ЗберЄЖЄТЬСЯ ріВНІСТЬ RHU+П) Припускаючи, що при дякому п та RH = =RHmm активна складова RH (1+n) буде в достатній для потрібного коефіцієнта потужності мірі перевищувати реактивну, реалізацію умови (а) можна визначити у вигляді співвідношення . Ун*-УМ) ДІн < ДІндоп ( R H mm ^ Uно Де К< RH, COS ¥ sr/тт )_ ТТ ЗМІНИ ДІІ||тіп = ALJ|| COS V men у (1) З другого боку, так як ІІц при RH = RHmax досягає своєї максимальної можливої величини Unmax, виконання умови (б) буде досягнуто при виконанні вже іншого співвідношення (1+гГ) R. (2) и. Для того, щоб обидва співвідношення виконались одночасно, реакльний коефіцієнт перерахунку п має бути із допускаємих меж п' < п п' Якщо для конкретних умов використання дану умову забезпечити неможна, то необхідно або при п" < п' зменшувати очікуване значення коефіцієнта потужності, або допускати порушення умови, що виражається формулою 2 (останнє може відобразитися у деякому зменшенні МЄЖ ВІДХИЛеННЯ ВИХІДНОГО СТруму При R H = R H max) На вибір коефіцієнта перерахунку п впливають також параметри СТІЙКОСТІ, І ЯК ВИЯВИЛОСЬ, при реалізації способа в конкретних пристроях доцільно у ланцюзі зворотнього зв'язку другого ступеня регулювання виконувати наступні два правила - вирівнювати на вході ланцюга по рівню обидві вимірювані напруги ІІц і UH (тут, власне, припускається деяке номінальне, або можливо середнє значення опору нагрузки), - сигнал різниці потім збільшувати в п раз Обидва ці правила враховані у формулюванні і відображені на фіг 4 Для підвищених потужностей прийнятне використання способа по п 1 У порівнянні з повністю імпульсними методами регулювання, використання заявляемого способа при незначному зменшенні ККД (в практичних зразках навіть при малих, до 40 Вт, потужностях нагрузки реалізований г\= 0,78, 43426 а при повністю імпульсному методі розрахунковий ККД не перевищив би 0,82, тобто різниця не більше 4%) буде досягнуто значне підвищення надійності та ШВИДКІСНОСТІ дії Те і інше пояснюється наявністю регулюючого органу другого ступеня, що використовується в активному режимі Це виключає появу досить руйнівних кидків струму при перенавантаженнях Відсутність вказаних кидків струму дозволяє значно спростити задачу керування (тільки для того, щоб наперед зафіксувати появу цих кидків необхідно було б ввести п'ять окремих блоків) Використання способа по п 2, як вже було сказано дозволяє забезпечити деяке збільшення коефіцієнта потужності за рахунок росту активної складової струму силового ланцюга Такі умови досить часто можуть виявитися переважними для різних технологій з електроіскровою обробкою матеріалу Перераховані вище переваги по усуненню перенавантажень при кидках струму тут також зберігаються Використання запропонованого спосооа передбачає компромісне поєднання з обох, імпульсного та безперервного, способів регулювання, при котрому сума основних показників систем Ісгп електроживлення стає більшою, ніж при орієнтуванні на один тільки спосіб Таке використання стає реальною перевагою, наприклад, при побудові СЕЖ підвищеної потужності з напівпровідниковими виконавчими органами, де з-за великих перенавантажень по потужності при миттєвому, впритул до короткого замикання, зменшенні опору нагрузки неможливо використовувати будь-який з цих способів окремо, або з-за наявності кидків струму для імпульсного, або перенапруг для безперервного способів регулювання свідоцтво СРСР № 1 677 703, Ш 2 Авторське свідоцтво СРСР № 1 739 371, кл G 05 F 1/669 г ^ с 3 Авторське свідоцтво СРСР №495 655, кл G 05 F 1/56 4 Б М Іванчукташ Тіристорні і магнітні стабілізатори напруги, - М "Енергія11, 1978 - с 112 5 Авторське свідоцтво СРСР №1 118 938, кл G 05 F 3/08 6 Авторське свідоцтво СРСР №1 679 475, кл G 05 F 1/563 г 2cm Фіг. 1 R H.rnQx ~ 2 P н. mt.n = COIISt 43426 /777 Фіг. З о /777 Фіг. 4 Тираж 50 екз Відкрите акціонерне товариство «Патент» Україна, 88000, м Ужгород, вул Гагаріна, 101 (03122) 3 - 7 2 - 8 9 (03122) 2 - 5 7 - 0 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of two-stage stabilization of direct current
Автори англійськоюHubarevych Volodymyr Mykolaiovych, Zakrevskyi Stanislav Ivanovych, Ozerianskyi Anatolii Oleksandrovych, Bilyk Oleksandr Anatoliiovych
Назва патенту російськоюСпособ двухступенчатой стабилизации постоянного тока
Автори російськоюГубаревич Владимир Николаевич, Закревский Станислав Иванович, Озерянский Анатолий Александрович, Билык Александр Анатольевич
МПК / Мітки
МПК: G05F 1/56
Мітки: струму, постійного, стабілізації, двоступеневої, спосіб
Код посилання
<a href="https://ua.patents.su/5-43426-sposib-dvostupenevo-stabilizaci-postijjnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Спосіб двоступеневої стабілізації постійного струму</a>
Спосіб стабілізації електродугового розряду в плазмотроні постійного струму
Номер патенту: 28682
Опубліковано: 16.10.2000
Автори: Брожко Ростислав Миколайович, Дзюба В'ячеслав Леонідович, Корсунов Костянтин Анатолійович, Сергієнко Сергій Миколайович
МПК: H05B 7/22
Мітки: стабілізації, постійного, розряду, електродугового, спосіб, плазмотроні, струму
Формула / Реферат:
Спосіб стабілізації електродугового розряду в плазмотроні постійного струму, який включає вплив на розряд електромагнітним полем, який відрізняється тим, що вплив на розряд електромагнітним полем здійснюють шляхом послідовного чергування фаз позитивних напівперіодів джерела живлення, причому кожну фазу джерела живлення підключають до окремої секції анода.
Спосіб перетворення електроенергії змінного струму в електроенергію постійного струму
Номер патенту: 35873
Опубліковано: 16.04.2001
Автори: Померко Володимир Костянтинович, Буданков Олександр Кирилович, Солдатенко Генадій Тимофійович, Левченко Георгій Тимофійович
МПК: H02M 7/00
Мітки: спосіб, електроенергію, перетворення, струму, постійного, електроенергії, змінного
Формула / Реферат:
Спосіб перетворення електроенергії змінного струму в електроенергію постійного струму, що включає випрямлення змінної напруги первинної мережі електроживлення, накопичення електроенергії та наступне її розрядження на навантаження, який відрізняється тим, що протягуом періоду напруги первинної мережі електроживлення провадять почергове заряджання та розряджання, принаймні, двох накопичувачів електроенергії окремими контурами струму для кожного...
Пристрій електроживлення постійного струму

Номер патенту: 34901
Опубліковано: 15.03.2001
Автори: Чермянін Андрій Миколайович, Макаренко Володимир Васильович, Буданков Олександр Кирилович, Кучинський Віктор Віцентійович, Левченко Георгій Тимофійович
Мітки: струму, постійного, пристрій, електроживлення
Формула / Реферат:
Пристрій електроживлення постійного струму що містить першу та другу вхідні клеми, перший та другий діоди, перший та другий конденсатори, який відрізняється тим, що до нього введені третій та четвертий діоди, перший та другий ключові елементи та синхронізований з мережею електроживлення блок керування ключовими елементами, причому вхідні клеми підключені до мережі електроживлення змінного струму, анод першого і катод третього діодів з'єднані...
Пристрій для бездугової комутації ланцюгів постійного та змінного струму
Номер патенту: 35046
Опубліковано: 15.03.2001
Автор: Ткачов Анатолій Іванович
МПК: H01H 9/30
Мітки: струму, комутації, ланцюгів, змінного, бездугової, пристрій, постійного
Формула / Реферат:
Пристрій для бездугової комутації ланцюгів постійного та змінного струму, який містить навантаження, перший n-p-n транзистор, діод, шини джерела живлення та шини джерела керуючої напруги, електромагнітне реле з замикаючим контактом, перший вивід якого підключено до першої шини джерела живлення, другий вивід через навантаження з'єднано з другою шиною джерела живлення, колектор першого транзистора підключено до другого виводу замикаючого...
Пристрій для регулювання напруги генератора постійного струму
Номер патенту: 22231
Опубліковано: 30.06.1998
Автори: Молотов Віктор Тимофійович, Березовський Павло Йосипович, Дадівєрін Іван Георгійович, Імерелі Володимир Борисович
МПК: H02P 9/00
Мітки: напруги, генератора, регулювання, пристрій, постійного, струму
Формула / Реферат:
Пристрій для регулювання найрути генератора постійного струму, який складається з модулятора ширини імпульсів, задатчика напруги, ключового підсилювача потужності і обмотки збудження генератора постійного струму, який відрізняється тим, що модулятор ширини імпульсів складається з генератора тактових імпульсів і одновібратора з імпульсним пусковим і потенціальним часозадаючим входами, причому імпульсний пусковий вхід одновібратора...
Попередній патент: Спосіб отвердження луговмісних радіоактивних відходів
Наступний патент: Спосіб очищення води фільтруванням
Випадковий патент: Похідні біциклічних каркасних амінів як регулятори росту рослин