Пристрій для вплетення фрагментів макроводоростей у безперервний колектор
Формула / Реферат
Пристрій для вплетення фрагментів макроводоростей в колектор, що має барабан для подачі колектора, ємність з розташованими в ній механізмом протягування колектора і блоком вплетення в нього фрагментів макроводоростей, що включає бункер для посадочного матеріалу з водоподавальним патрубком і переливним отвором, дозатор з мірною порожниною, ресивер із співвіснорозташованим водоподавальним патрубком і прилад для впровадження фрагментів макроводоростей в пасми колектора, що являє собою крильчатку з порожнистими лопатями, які приводяться в рух електродвигуном, а також систему автоматичного управління з виконавчими механізмами, який відрізняється тим, що механізм протягування колектора складається з електродвигуна, транспортера із закріпленими на стрічці пружинними затисками і магнітами, а у основи С-подібним розмикачем, кінці якого мають клиноподібну форму, лопаті крильчатки мають криволінійну форму, їхні тильні сторони вигнуті по спіралі Архимеда, кожна лопать оснащена магнітом і має отвір для пропуску пасма колектора, система автоматичного управління містить одновібратор з регульованою тривалістю імпульсу, датчик синхроімпульсів механізму протягування, датчик синхроімпульсів положення крильчатки, датчик натягу пасом колектора, схему збігу, лічильник з регульованим переповненням і блок управління швидкістю обертання електродвигунів крильчатки і механізму протягування колектора.
Текст
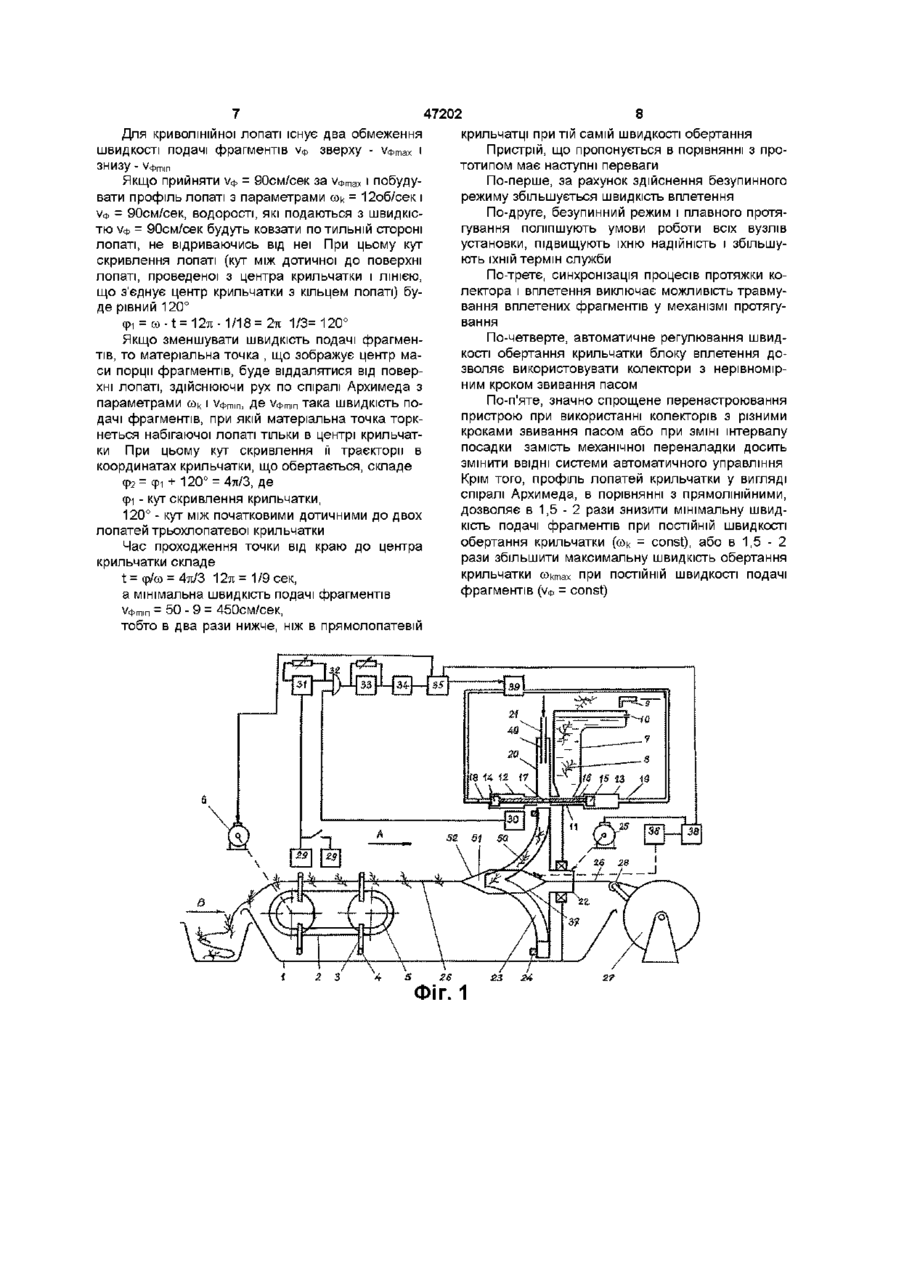
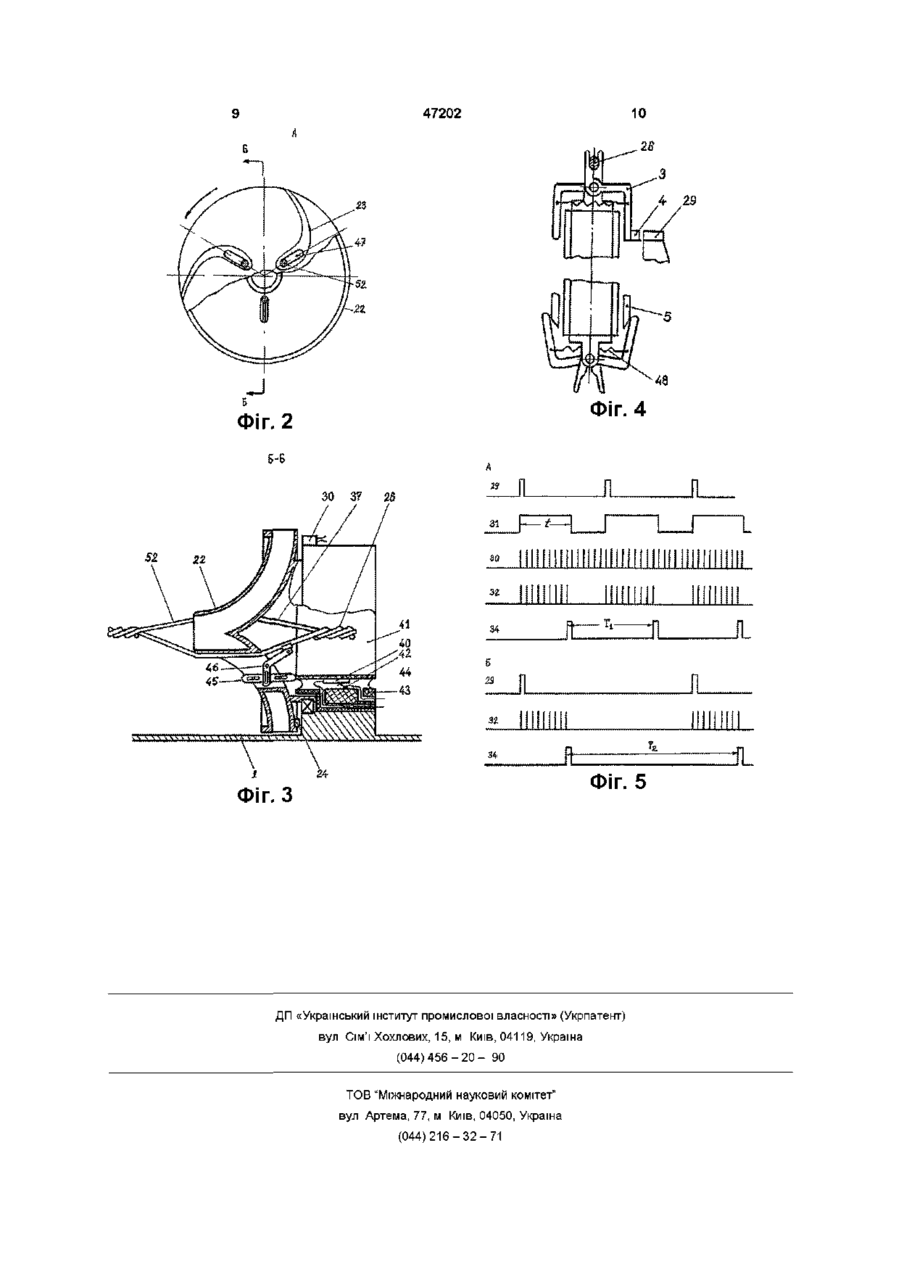
Пристрій для вплетення фрагментів макроводоростеи в колектор, що має барабан для подачі колектора, ємність з розташованими в ній механізмом протягування колектора і блоком вплетення в нього фрагментів макроводоростеи, що включає бункер для посадочного матеріалу з водоподавальним патрубком і переливним отвором, дозатор з мірною порожниною, ресивер із співвіснорозташованим водоподавальним патрубком і прилад для впровадження фрагментів макроводоростеи в пасми колектора, що являє собою крильчатку з порожнистими лопатями, які приводяться в рух елек 47202 го регулювання швидкості обертання колеса механізму вплетення, а фрикційний варіатор швидкості перешкоджає його здійсненню Попереднє ж регулювання швидкості обертання колеса за умовою рівності числа його оборотів числу витків пасом на необхідній довжині колектора не дозволяє уникнути перекручення (або недокручування) колектора при його нерівномірній скрутці по всій довжині або найменшій неточності настроювання В основу винаходу пристрій для вплетення фрагментів макроводоростей в безперервний колектор поставлено задачу шляхом виключення фази зупинки в процесі вплетення фрагментів водоростей в безперервний колектор, здійснення плавного протягування колектора, а також автоматичного регулювання швидкості обертання колеса механізму вплетення, синхронізації процесів протяжки і вплетення, забезпечити підвищення швидкості вплетення макроводоростей, підвищення надійності і поліпшення технічних характеристик пристрою Поставлена задача досягається тим, що, у відомому пристрої, що має барабан для подачі колектора, ємність з розташованими в ній механізмом протягування колектора і блоком вплетення в нього фрагментів макроводоростей, який включає бункер для посадочного матеріалу з водоподавальним патрубком і переливним отвором, дозатор з мірною порожниною, ресивер із співвіснорозташованим водоподавальним патрубком і прилад для впровадження фрагментів макроводоростей в пасма колектора, який являє собою крильчатку з порожнистими лопатями, що приводиться в рух електродвигуном, а також систему автоматичного управління з виконавчими механізмами, механізм протягування колектора складається з електродвигуна, транспортера із закріпленими на стрічці пружинними затисками і магнітами, а у основи - Собразним розмикачом, КІНЦІ ЯКОГО мають клиноподібну форму, лопаті крильчатки мають криволінійну форму, їхні тильні сторони вигнуті по спіралі Архимеда, кожна лопать оснащена магнітом і має отвір для пропуску пасма колектора, система автоматичного управління містить одновібратор з регульованою тривалістю імпульсу, датчик синхроімпульсів механізму протягування, датчик синхроімпульсів положення крильчатки, датчик натягу пасом колектора, схему збігу, лічильник з регульованим переповненням і блок управління швидкістю обертання електродвигунів крильчатки і механізму протяжки колектора У пристрій для вплетення фрагментів макроводоростей в безперервний колектор, який заявляється, введені нові елементи датчики синхроімпульсів протягування і положення крильчатки, датчик натягу пасом колектора, одновібратор з регульованою тривалістю імпульсу, лічильник імпульсів з регульованим переповненням, електродвигун з регульованою швидкістю обертання Колесо блоку посадки виконано у вигляді крильчатки з криволінійними стінками і криволінійними лопатями, причому створююча тильної поверхні лопаті являє собою частину спіралі Архимеда Механізм протяжки виконаний у вигляді транспортера з пружинними затисками і клиновим розмикачем Порівняння технічного рішення, що заявляєть ся, з відомими показує, що перераховані елементи, крім крильчатки запропонованої конструкції, широко ВІДОМІ Однак, при введенні їх в пристрій у вказаному сполученні з іншими елементами, з'являються нові властивості стає можливим безупинний процес вплетення фрагмента водоростей в безперервний колектор Оригінальна конструкція лопатей крильчатки, що мають криволінійну форму, при якій їхні тильні сторони вигнуті по спіралі Архимеда, дозволяє максимально використовувати сектор 120° для прийому порції фрагментів макроводоростей при безперервному обертанні крильчатки і полегшує їхнє проходження через вхідний отвір до місця вплетення Сутність винаходу пояснюється кресленнями На фіг 1 представлена схема пристрою в поздовжньому перетині, на фіг 2 - вид А, на фіг 3 розріз по Б-Б, на фіг 4 - вид В і на фіг 5 - почасова діаграма, що відображає взаємодію блоків системи автоматичного управління і виконавчих механізмів Пристрій для посадки макроводоростей має ємність 1 (див фіг 1) з розташованим у ній механізмом протягування у вигляді транспортера 2 з пружинними затисками 3, на яких закріплені магніти 4, і С-образним клиновим розмикачем 5, що приводиться в рух електродвигуном 6, і блоком вплетення фрагментів, який включає бункер 7 для посадочного матеріалу 8 з водоподавальним патрубком 9 і переливним патрубком 10, дозатор 11 з гідроциліндрами 12 і 13, поршнями 14 і 15, плунжером 16 з мірною порожниною 17 і нагнітаючими патрубками 18 і 19, ресивер 20 з водоподавальним патрубком 21 і крильчатку 22 з лопатями 23, при КІНЦІ яких закріплені магніти 24, яка приводиться в обертання електродвигуном 25, механізм подачі колектора 26 у вигляді підпружиненого барабана 27 і спрямуючих блоків 28, а також систему автоматичного управління, яка включає датчики синхроімпульсів механізму протяжки 29, датчик синхроімпульсів ЗО положення крильчатки 22, регульований одновібратор 31, схему збігу 32, лічильник з регульованим переповненням 33, одновібратор 34, електронне реле 35, датчик 36 натягу пасом, що розкручуються 37, і блок 38 управління швидкістю обертання колеса 22, і електропривод 39 Датчики синхроімпульсів 29 і ЗО являють собою гирконові реле, що замикають контакти при впливі магнітного поля магнітів 4 і 24, закріплених на пружинних затисках 3 і крильчатці 22 Для регулювання моменту запуску дозатора 11 і подачі порції водоростей у проміжок між лопостями крильчатки 23 датчики 29 закріплюються з можливістю переміщення по ходу руху колектора 26, а датчик ЗО по ходу обертання крильчатки 22 Датчик 36 натягу паєм 37 являє собою перемінний резистор 40 (див фігЗ), закріплений на рухливому КІЛЬЦІ 41, движок якого 42 закріплений на нерухомій обоймі 43 Кільце 41 з'єднане з обоймою 43 за допомогою двох еластичних кільцевих манжет 44 Кільце 41 переміщується вздовж осі колектора 26 за допомогою системи важелів 45 і 46 при ЗМІНІ натягу пасом, що розкручуються 37 Пристрій працює таким чином Кінець колекто 47202 pa 26 пропускають через спрямовуючі блоки 28, розплітають на пасма 37, пропускають пасма через отвір 47 в лопатях 23 крильчатки 22 (див фіг 2), знову сплітають їх і закріплюють в пружинних затисках 3, попередньо послабивши натяг пружини 48 (див фіг 4), При включенні системи автоматичного управління електронне реле 35 подає напругу на електродвигун 6, блок 38 управління швидкістю обертання електродвигуна 25 і електропдропривід 39, при цьому рідина нагнітається через патрубок 18 в гідроциліндр 12 І плунжер 16 займає крайнє праве положення Стрічка транспортера 2 рухається з постійною швидкістю, при цьому з двох пружинних затисків З, що знаходяться вгорі, один завжди затиснутий і безперервно протягає колектор 26 При ВІДХОДІ затиску 3 з верхньої прямолінійної ділянки нижні КІНЦІ підпружинених важелів набігають на клинові розмикачі 5 (див фіг 1 і фіг 4) і колектор 26 звільняється Черговий захват колектора здійснюється затиском 3 на прямолінійній ДІЛЯНЦІ ДО ТОГО Я К попередній затиск звільнить його, так що колектор рухається без подовжніх і поперечних ривків При відключеній схемі збігу 32 в блоці 38 для обраного колектора 26 встановлюють таку керуючу напругу, щоб швидкість обертання крильчатки 22 була у ВІДПОВІДНОСТІ до рівняння СОКП1 = 2л • Vnp/Li, (1) де v n p - лінійна швидкість протяжки колектора, І_і - крок звивання пасом колектора При додержанні цього рівняння напруження пасом, що розплітаються, 37 і кут а між ними залишається постійним (див фігЗ), і важелі 45, 46 і кільце 41 зберігають первісне положення При порушенні цього рівняння, наприклад, за рахунок коливання кроку навивки по довжині колектора, міняється натяг пасом, що розплітаються 37, міняється кут а між ними, міняється положення важелів 46 і 45 і переміщується кільце 4 1 , змінюючи опір резистора 40, внаслідок чого змінюється керуюча напруга на виході блоку 38 і змінюється швидкість обертання двигуна 25, що приводить швидкість обертання крильчатки 22 у ВІДПОВІДНІСТЬ до рівняння (1) Після регулювання подачі колектора ВІДПОВІДНО до необхідного інтервалу вплетення в нього фрагментів, у проміжку між двома затисками З розташовують необхідну КІЛЬКІСТЬ датчиків 29 і настроюють одновібратор 31 так щоб тривалість його імпульсу х (див фіг 5А) складала (0,65 - 0,7)Т - мінімального періоду вплетення (періоду проходження синхроімпульсів від максимальної КІЛЬКОСТІ датчиків 29) Імпульс одновібратора 31 є дозволом для проходження синхроімпульсів датчика ЗО положення крильчатки 22 При переповненні лічильника 33 з його виходу надходить сигнал, що запускає одновібратор 34, і з електронного реле 35 на електропдропривід надходить імпульс напруги, під дією якого відбувається нагнітання рідини через патрубок 19 у гідроциліндр 13, і плунжер 16 переміщується ліворуч, переміщуючи порцію фрагментів водоростей до вихідного отвору ресивера 20 (див ф і г 1 ) Вода, запасена в ресивері, під дією енергії стиснення, накопиченої в повітряній поду шці 49, гидроімпульсом змиває фрагменти водоростей 50 в порожнину крильчатки 22 між двома лопатями 23 і проштовхує їх до місця вплетення 51, обмеженого соплом крильчатки 22 і пасмами, що сплітаються 52 Продовжуючи обертатися, крильчатка 22 заплітає порцію фрагментів 50 між пасмами 52 Після закінчення імпульсу одновібратора 34, електронне реле 35 подає напругу на електропривод 39, під дією якого рідина нагнітається в гідроциліндр 12 і плунжер 16, переміщується поршнем 14 в крайнє праве положення Наступний імпульс одновібратора 34 служить сигналом початку здійснення чергового акта посадки Ємність лічильника 33 встановлюють таку, щоб блок вплетення спрацьовував як найближче до середини мінімального часового інтервалу, обмеженого двома синхроімпульсами датчиків 29 Наприклад, якщо мінімальний інтервал посадки L = 6см, v n p = бсм/с, крок звивання пасом 1 = 1см, тоді Tmm = 1с, необхідна швидкість обертання крильчатки п = боб/с (со = 12рад/с), тривалість імпульсу одновібратора 31 встановлюють 700мсек, а ємність лічильника 33 - 9 імпульсів (3 імпульси на кожний оборот), і посадка відбувається через 500мсек після проходження чергового затиску З першого датчика 29 на відстані Зсм від наступного затиску 3, якщо при цьому крок звивки пасом 1 буде змінюватись в межах ±25% від норми (тобто від 1,25см до 0,75см), КІЛЬКІСТЬ оборотів крильчатки 22 буде змінюватись від 4,8об/с до 8об/с, і посадка здійсниться, ВІДПОВІДНО, через 625мсек або 375мсек на відстані 3,75см або 2,25см від затиску З і не буде виходити за ці межі, тому що після кожного вплетення ВІДЛІК буде йти знову з нульової ВІДМІТКИ, що визначеної черговим синхроімпульсом датчиків 29 При відключенні половини датчиків 29, часовий інтервал Т між синхроімпульсами протяжки збільшиться ВДВІЧІ і, ВІДПОВІДНО, ВДВІЧІ збільшиться інтервал вплетення (див фіг 5Б) При одному працюючому датчику 29 інтервал вплетення буде дорівнювати відстані М між затисками 3 Якщо з частини затисків 3 зняти магніти 4, можна отримати інтервали вплетення рівні 2М, ЗМ, 6М і т д Профіль лопатей крильчатки у вигляді спіралі Архимеда, у порівнянні з прямолінійними, дозволяє в 1,5 - 2 рази знизити мінімальну швидкість подачі фрагментів при ПОСТІЙНІЙ ШВИДКОСТІ обертання крильчатки (cok " const), або в 1,5 - 2 рази збільшити максимальну швидкість обертання крильчатки C k a При ПОСТІЙНІЙ ШВИДКОСТІ ПОДЗЧІ фраOm x гментів (УФ = const) Наприклад, при с = cp/t = 12ті о рад/сек (п = боб/сек), где с - угол, пройдений за р час t, час повороту на кут 120° (2ті/3) дорівнює 1/18 сік За цей час порція фрагментів повинна пролетіти від краю крильчатки радіуса R до центра (Уфтщ = R/t) Якщо R = 5см, Уфтт = 90см/сек, інакше при прямолінійному профілі лопатей порція фрагментів торкається наступної лопаті При У > Уфтщ маф теріальна точка, що відображає центр маси фрагментів, не буде зачіпати набігаючу лопать, однак, збільшення швидкості подачі фрагментів з мірної порожнини може привести до їх травмування 47202 Для криволінійної лопаті існує два обмеження швидкості подачі фрагментів У зверху - Уфтах і ф ЗНИЗУ- Уфтіп Якщо прийняти У = 90см/сек за Уфтах і побудуф вати профіль лопаті з параметрами Ю = 12об/сек і к У = 90см/сек, водорості, які подаються з швидкісф тю У = 90см/сек будуть ковзати по тильній стороні ф лопаті, не відриваючись від неї При цьому кут скривлення лопаті (кут між дотичної до поверхні лопаті, проведеної з центра крильчатки і ЛІНІЄЮ, що з'єднує центр крильчатки з кільцем лопаті) буде рівний 120° q>i = o ) - t = 1 2 * - 1 / 1 8 = 2 * 1/3=120° Якщо зменшувати швидкість подачі фрагментів, то матеріальна точка , що зображує центр маси порції фрагментів, буде віддалятися від поверхні лопаті, здійснюючи рух по спіралі Архимеда з параметрами Ю і УФтш, де Уфтт така швидкість пок дачі фрагментів, при якій матеріальна точка торкнеться набігаючої лопаті тільки в центрі крильчатки При цьому кут скривлення її траєкторії в координатах крильчатки, що обертається, складе Ф2 = фі + 120° = 4ті/3, де Фі - кут скривлення крильчатки, 120° - кут між початковими дотичними до двох лопатей трьохлопатевої крильчатки Час проходження точки від краю до центра крильчатки складе t = ф/со = 4л/3 12л = 1 /9 сек, а мінімальна швидкість подачі фрагментів УФтш - 50 - 9 = 450см/сек, тобто в два рази нижче, ніж в прямолопатевій 8 крильчатці при тій самій швидкості обертання Пристрій, що пропонується в порівнянні з прототипом має наступні переваги По-перше, за рахунок здійснення безупинного режиму збільшується швидкість вплетення По-друге, безупинний режим і плавного протягування поліпшують умови роботи всіх вузлів установки, підвищують їхню надійність і збільшують їхній термін служби По-третє, синхронізація процесів протяжки колектора і вплетення виключає можливість травмування вплетених фрагментів у механізмі протягування По-четверте, автоматичне регулювання швидкості обертання крильчатки блоку вплетення дозволяє використовувати колектори з нерівномірним кроком звивання пасом По-п'яте, значно спрощене перенастроювання пристрою при використанні колекторів з різними кроками звивання пасом або при ЗМІНІ інтервалу посадки замість механічної переналадки досить змінити ВВІДНІ системи автоматичного управління Крім того, профіль лопатей крильчатки у вигляді спіралі Архимеда, в порівнянні з прямолінійними, дозволяє в 1,5 - 2 рази знизити мінімальну швидкість подачі фрагментів при ПОСТІЙНІЙ ШВИДКОСТІ обертання крильчатки (cok = const), або в 1,5 - 2 рази збільшити максимальну швидкість обертання крильчатки c k a при ПОСТІЙНІЙ швидкості подачі om x фрагментів (УФ = const) ФІГ. 1 47202 Фіг. 4 ЗО 52 З? 22 3 2 Л 3 4 3 2 Фіг. 5 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюBeliaiev Borys Mykolaiovych
Автори російськоюБеляев Борис Николаевич
МПК / Мітки
МПК: A01G 31/02
Мітки: фрагментів, колектор, пристрій, безперервний, вплетення, макроводоростей
Код посилання
<a href="https://ua.patents.su/5-47202-pristrijj-dlya-vpletennya-fragmentiv-makrovodorostejj-u-bezperervnijj-kolektor.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вплетення фрагментів макроводоростей у безперервний колектор</a>
Спосіб остеосинтезу фрагментів довгих кісток та пристрій для його здійснення
Номер патенту: 34192
Опубліковано: 15.02.2001
Автори: Бітчук Дмитро Денисович, Бітчук Микола Денисович, Бітчук Денис Дмитрович
МПК: A61B 17/56, A61B 17/64
Мітки: пристрій, фрагментів, довгих, кісток, остеосинтезу, спосіб, здійснення
Текст:
...ендосту і вмісту кістково-мозкового каналу, що сприяє нормальній регенерації кісткової тканини в зоні перелому. Невеликі за розмірами з'єднувальний елемент та фіксатори не потребують повторної операції для видалення їх після зрощення перелому. На кресленні показані: на фіг. 1 - загальний вигляд застосування пристрою для остеосинтезу довгих кісток; на фіг. 2, 3 - вигляд збоку та вигляд знизу з'єднувального елемента; на фіг. 4, 5 - вигляд...
Пристрій для фіксації фрагментів кістки
Номер патенту: 42509
Опубліковано: 15.10.2001
Автори: Селезньов Анатолій Іванович, Скребцов Володимир Володимирович, Никифоров Ростіслав Ростіславович, Ткач Андрій Вікторович, Куценко Сергій Миколайович
МПК: A61B 17/58
Мітки: фіксації, пристрій, фрагментів, кістки
Формула / Реферат:
1. Пристрій для фіксації фрагментів кістки, що включає корпус, виконаний у вигляді стрижня, верхня частина якого виконана відхиленою від його подовжньої oсі на кут 11°, у верхній частині корпуса виконаний перпендикулярний до подовжньої oсі наскрізний паз, у який установлений фіксуючий шуруп, у нижній частині корпуса перпендикулярно його подовжній oсі виконані наскрізні отвори, у яких установлені фіксуючі кріпильні деталі, кінець нижньої...
Пристрій для фіксації фрагментів трубчастих кісток
Номер патенту: 8574
Опубліковано: 30.09.1996
Автор: Бітчук Денис Дмитрович
МПК: A61B 17/58
Мітки: фрагментів, кісток, трубчастих, фіксації, пристрій
Формула / Реферат:
Устройство для фиксации фрагментов трубчатых костей по авт. св. № 990209, отличающееся тем, что, с целью сокращения времени операции, устройство снабжено кондукторной планкой с отверстиями, соединенной с пластиной таким образом, что оси отверстий планки и пластины взаимно перпендикулярны.
Пристрій для фіксації фрагментів трубчастих кісток
Номер патенту: 8686
Опубліковано: 30.09.1996
Автори: Назаров Майк Васильович, Бітчук Денис Дмитрович, Пейков Борис Васильович, Трубников Віктор Пилипович
МПК: A61B 17/86, A61B 17/68, A61B 17/84
Мітки: пристрій, кісток, трубчастих, фіксації, фрагментів
Формула / Реферат:
Устройство для фиксации фрагментов трубчатых костей, содержащее штифт с элементами крепления и установленный на нем кондукторный корпус с отверстиями, отличающееся тем, что, с целью возможности лечения переломов сдефектом костной ткани и уменьшения травматичности, штифт снабжен дополнительными элементами крепления, установленными перпендикулярно основным, кондукторный корпус выполнен в виде скобы, связанной с штифтом, и снабжен пластиной с...
Пристрій для репозиції та фіксацїй фрагментів трубчастих кісток
Номер патенту: 3246
Опубліковано: 26.12.1994
Автори: Венгер Віллен Феодосійович, Бурлака Валентин Григорович, Кулаженко Євген Володимирович
МПК: A61B 17/60
Мітки: фіксацїй, трубчастих, репозиції, фрагментів, пристрій, кісток
Формула / Реферат:
Устройство для репозиции и фиксации фрагментов трубчатых костей, содержащее опоры с отверстиями и связанные с ними скобы в виде шарнирно соединенных ветвей с заостренными элементами, а также расположенные взаимно перпендикулярно фиксаторы скоб в виде резьбовых стяжек и дистракторы, установленные в отверстиях опор, отличающееся тем, что опоры выполнены в виде изогнутых планок, закрепленных на ветвях скоб, отверстия в опорах выполнены в виде...
Попередній патент: Пристрій для озвучування концертної діяльності
Наступний патент: Спосіб оперативного лікування посттравматичної променевої косорукості
Випадковий патент: Спосіб контролю параметрів структури конструкційних матеріалів