Спосіб руху крокуванням і рушій козака для крокування
Номер патенту: 48987
Опубліковано: 16.09.2002
Автори: Козак Тетяна Андріівна, Козак Андрій Михайлович, Козак Віра Валентинівна
Формула / Реферат
1. Спосіб переміщення шляхом установки одної опорної частини рушія в упорному стані через упор і другої опорної частини рушія в опорному стані, а упора в неопорному стані на відстані від упорного стану, переміщення опорної частини від опорного стану через опору на вершині опорного середовища, переміщенням упора від неопорного стану в упорний стан, після переміщення опорної частини і упора від одної до другої ділянки опорного середовища, в період переміщення другої опорної частини від опорного стану переміщенням упора від неопорного стану в упорний стан, або в період розташування другої опорної частини в упорному стані через упор, або в період переміщення другої опорної частини від упорного стану через упор в опорний стан і до переміщення одної опорної частини від упорного стану через упор в опорний стан, який відрізняється тим, що переміщення опорної частини від опорного стану через опору, переміщенням упора від неопорного стану в упорний стан, і переміщення цієї опорної частини від упорного стану через упор в опорний стан на одній і тій же ділянці опорного середовища виконують в протилежних напрямках, зміною кроку між шарнірними валами, навантаженням цих валів механізмом крокування в протилежних напрямках і, коли переміщення виконують від опорного стану, то зміну кроку виконують в одному напрямку, а коли переміщення виконують в опорний стан, то зміну кроку виконують в протилежному напрямку, ці переміщення виконують на одній і тій же опорі, яку виконують веденою опорою, наприклад у вигляді двох котків на одній з опорних частин для опорного стану на вершинах двох східців, або одного котка для опорного стану на верхній ділянці землі.
2. Рушій, що має дві опорні частини і упори на них та шарнірні вали та механізм крокування, одна з опорних частин розташована через упор в упорному стані, а упор другої опорної частини розташований в неупорному стані, який відрізняється тим, що коли опорна частина розташована в упорному стані, то вона має упорний стан також через ведену опору, а коли упор другої опорної частини розташований в неупорному стані, то опорна частина розташована у опорному стані через ведену опору, а механізм крокування виконаний з можливістю зміни кроку між шарнірними валами для переміщення одної опорної частини від упорного стану через упор в неупорний стан цього упора і переміщенням другої опорної частини від опорного стану в упорний стан через упор рухомим опорним станом цих ведених опор, наприклад котків при русі по сходах.
Текст
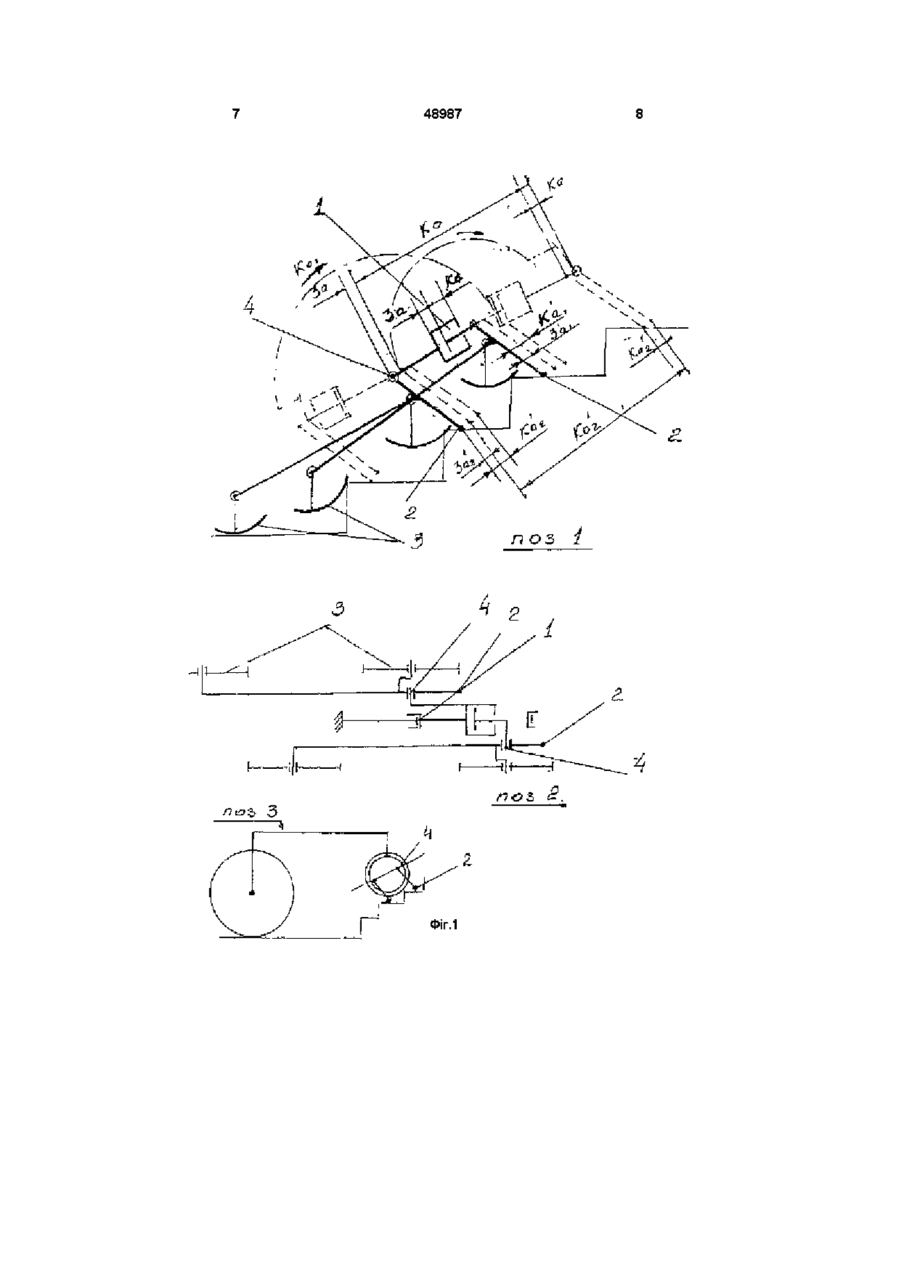
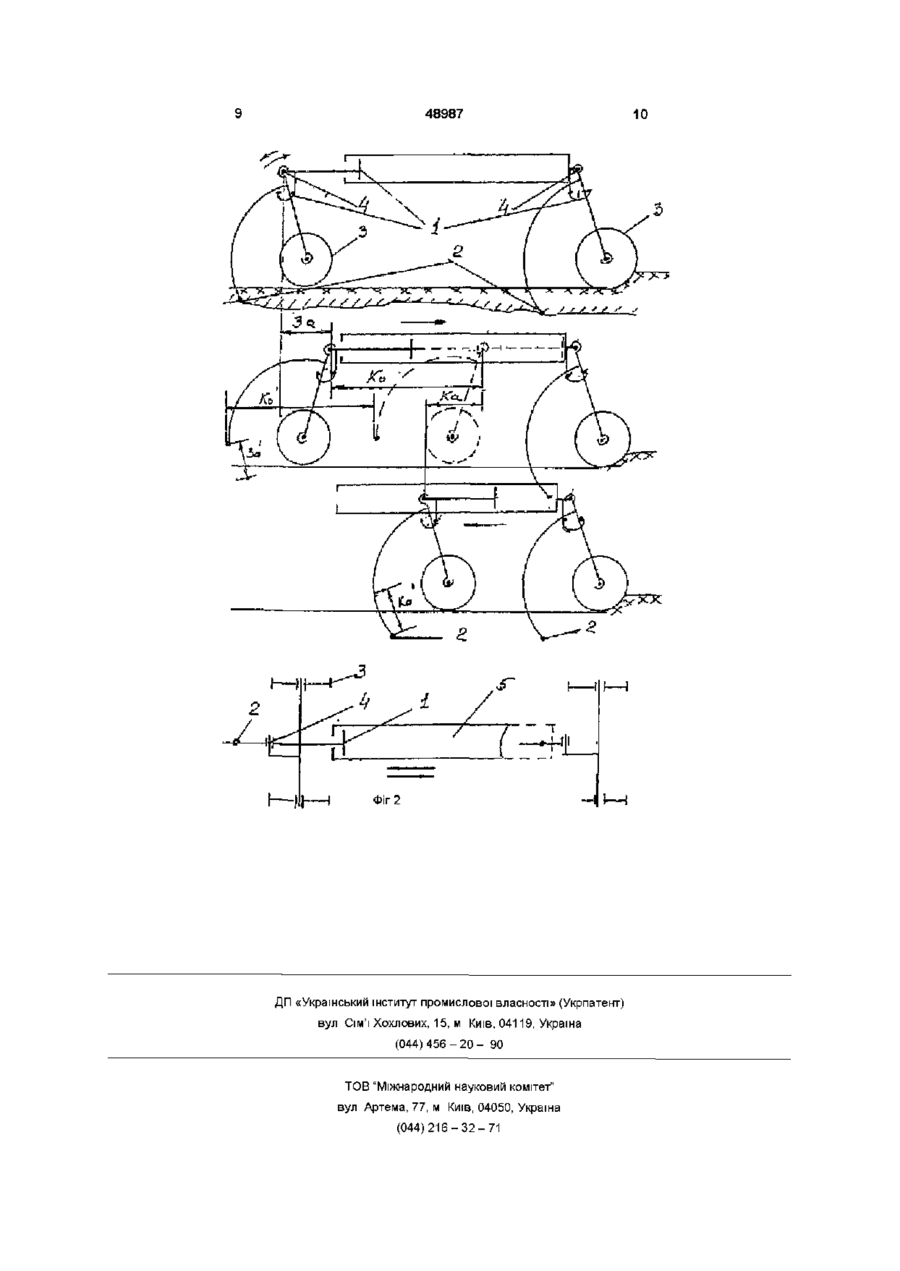
1 Спосіб переміщення шляхом установки одної опорної частини рушія в упорному стані через упор і другої опорної частини рушія в опорному стані, а упора в неопорному стані на відстані від упорного стану, переміщення опорної частини від опорного стану через опору на вершині опорного середовища, переміщенням упора від неопорного стану в упорний стан, після переміщення опорної частини і упора від одної до другої ділянки опорного середовища, в період переміщення другої опорної частини від опорного стану переміщенням упора від неопорного стану в упорний стан, або в період розташування другої опорної частини в упорному стані через упор, або в період переміщення другої опорної частини від упорного стану через упор в опорний стан і до переміщення одної опорної частини від упорного стану через упор в опорний стан, який відрізняється тим, що переміщення опорної частини від опорного стану через опору, переміщенням упора від неопорного стану в упорний стан, і переміщення цієї опорної частини від упорного стану через упор в опорний стан на одній І ТІЙ же ДІЛЯНЦІ опорного середовища виконують в протилежних напрямках, зміною кроку між шарнірними валами, навантаженням цих валів механізмом крокування в протилежних напрямках і, коли переміщення виконують від опорного стану, то зміну кроку виконують в одному напрямку, а коли переміщення виконують в опорний стан, то зміну кроку виконують в протилежному напрямку, ці переміщення виконують на одній і тій же опорі, яку виконують веденою опорою, наприклад у вигляді двох котків на одній з опорних частин для опорного стану на вершинах двох СХІДЦІВ, або одного котка для опорного стану на верхній ДІЛЯНЦІ землі 2 Рушій, що має дві опорні частини і упори на них та шарнірні вали та механізм крокування, одна з опорних частин розташована через упор в упорному стані, а упор другої опорної частини розташований в неупорному стані, який відрізняється тим, що коли опорна частина розташована в упорному стані, то вона має упорний стан також через ведену опору, а коли упор другої опорної частини розташований в неупорному стані, то опорна частина розташована у опорному стані через ведену опору, а механізм крокування виконаний з можливістю зміни кроку між шарнірними валами для переміщення одної опорної частини від упорного стану через упор в неупорний стан цього упора і переміщенням другої опорної частини від опорного стану в упорний стан через упор рухомим опорним станом цих ведених опор, наприклад котків при русі по сходах Винахід відноситься до транспорту, конкретно - для переміщення по опорному середовищу, яке є сходи, земля і т і Відомий спосіб переміщення шляхом установки одної опорної частини рушія в упорному стані через упор і другої опорної частини рушія в опорному стані, а упора в неопорному стані на відстані від упорного стану, переміщення опорної частини від опорного стану через опору на вершині опорного середовища переміщенням упора від неопорного стану в упорний стан після переміщення опорної частини і упора від одної до другої ділянки опорного середовища в період переміщення другої опорної частини від опорного стану переміщенням упора від неопорного стану в упорний стан, або в період розташування другої опорної частини в упорному стані через упор, або в період переміщення другої опорної частини від упорного стану через упор в опорний стан і до переміщення одної опорної частини від упорного стану через упор в опорний стан Такий спосіб переміщання виконують рушієм, О і 00 о> 00 48987 який мав дві опорні частини і упори на них та приводні вали, та механізм крокування, одна з опорних частин розташована в упорному стані через упор, а упор другої опорної частини розташований в неопорному стані Такий спосіб переміщення і рушій показано в патенті РФ № 2058766, 1996р , B62D67/028 [1] Недоліки такого способу переміщення по сходах 1 Переміщення опорної частини від опорного стану через опору на вершині опорного середовища /на вершині східця сходів/ переміщенням упора від неопорного стану в упорний стан, і переміщення цієї опорної частини від упорного стану через упор в опорний стан виконують на одній ДІЛЯНЦІ опорного середовища в протилежний напрямках, але на різних упорах, а на другій ДІЛЯНЦІ опорного середовища в одному напрямку і на різних упорай і качанням цих упорів Качання упора приводить до пробуксовки /на площадці східця/ ЯК на одній, так і ви другій ділянках опорного середовища, а це не гарантуй установки опорної частини в опорному стані, а упора в неопорному станіна відстані від упорного стану і цим не гарантується надійність руху по сходах 2 Установку опорних частин на опорне середовище виконують передаванням крутильного моменту опорній частині через приводні вили періодично, що ускладнює переміщення по сходах 3 Передавання крутильного моменту опорній частині періодично ускладнює рух інвалідів по сходах мускульною силою, а також таке переміщення неможливе по сходах різних типів, в яких крок між вершинами сусідніх СХІДЦІВ лежить в межах від 0,29м до 0,37м 4 Переміщення опорної частини на одній з двох ділянок опорного середовища /на одному а двох СХІДЦІВ/ виконують пробуксовкою опорної частини по вершині верхнього східця і по площадці НИЖНЬОГО СХІДЦЯ СХОДІВ Недоліком такого способу переміщення по землі є те, що переміщення упора в упорний стан і від нього виконують в одному напрямку, а це руйнує опори середовище Відомий рушій, який має дві опорні частини і упори на них та шарнірні вали, також механізм крокування, одна з опорних частин розташована через упор в упорному стані, а упор другої опорної частини розташований в неопорвому стані Таким рушієм виконують переміщення шляхом установки одної опорної частини рупія в упорному стані через упор і другої опорної частини рушія в опорному стані, а упора в неопорному отаві на відстані від упорного свану Такий рушій показано в патенті РФ №2009935, 1994р , B62D57/028, В62КЗ/00 [2] Недоліком такого рушія є те, що переміщення упора в упорний стан і від нього виконують в одному напрямку, а це руйнує опорне середовище і не зберігає анергію механізму крокування В основу винаходу поставлена задача - в способі шляхом удосконалення напрямку переміщення упора в упорний стан і від нього забезпечити збереження опорного середовища, енергії механізму крокування, а при переміщенні по сходах забезпечити, надійність переміщення по сходах інвалідів, переміщення по сходах різних типів, переміщення по площадці між сходами качанням катків, - в рушії шляхом удосконалення опорних частин забезпечити збереження енергії механізму крокування Поставлена задана вирішується - в способі переміщення шляхом установки одної опорної частини рушія в упорному стані через упор і другої опорної частини рупія в опорному стані, а упора в неопорному стані на відстані від упорного стазу, переміщення опорної частини від опорного стану через опору на вершині опорного середовища, переміщенням упора від неопорного стану в упорний стан після переміщення опорної частини і упора від одної до другої ділянки опорного середовища в період переміщення другої опорної частини від опорного стану переміщенням упора від неопорного стану в упорний стан, або в період розташування другої опорної частини в упорному стані через упор, або в період переміщення другої опорної частини від упорного стану через упор в опорний стан і до переміщення одної опорної частини від упорного стану через упор в опорний стан, згідно винаходу тим, що переміщення опорної частини від опорного стану через опору переміщенням упора від неопорного стану в упорний стан і переміщення цієї опорної частини від упорного стану через упор в опорний стан на одній і тій же ДІЛЯНЦІ опорного середовища виконують в протилежних напрямках, зміною кроку між шарнірними вадами, навантаженням цих валів механізмом крокування в протилежних напрямках, і коди переміщання виконують від опорного етану, то зміну кроку виконують в одному напрямку, а коли переміщення виконують в опорний стан, то зміну кроку виконують в протилежному напрямку, ці переміщення виконують на одній і тій же опорі, яку виконують ведомою опорою, наприклад, в вигляді двох катків на одній з опорних частин для опорного стану на вершинах двох СХІДЦІВ, або одного катка для опорного стану на верхній ДІЛЯНЦІ землі, - в рушії, який має дві опорні частини і упори на них та шарнірні вали, також механізм крокування, одна з опорних частин розташована через упор в упорному стані, а упор другої опорної частини розташований в неопорному стані, згідно винаходу тим, що коли опорна частина розташована в упорному стані, то вона має упорний стан також через ведому опору, а коли упор другої опорної частини розташований в неопорному стані, то опорна частина розташована з опорному стані через відому опору, а механізм крокування виконаний з можливістю зміни кроку між шарнірними валами для переміщення одної опорної частини від упорного стану через упор в неопорний стан цього упора і переміщення другої опорної частини від опорного стану в упорний стан через упор рухомим опорним станом цих відомих опор, наприклад, катків при руху по сходах В способі переміщення - зміна кроку між шарнірними валами дозволяв механізму крокування виконувати переміщення упора в упорний стан и від нього в протилежних напрямках на ведених опорах, і цим ліквідується пробуксовка упора при переміщенні по сходах, твердому, рідкому чи газоподібному опорним се 48987 редовищам, забезпечується установка опорної частини в опорному стані, а упора в неопорному стані, чим забезпечується збереження опорного середовища, енергії механізму крокування і надійність при руху по сходах різних типів, - зміна кроку між шарнірними валами при руху по сходах забезпечує СТІЙКІСТЬ рушія в випадку відсутності енергії механізму крокування В рушії установка на опорній частині веденої опори /катка/ забезпечує переміщення упора в упорний стан і від нього в протилежних напрямках, чим забезпечується названий в способі технічний результат, одночасна установка обидвох опорних частин в упорний стан і СТІЙКІСТЬ рушія на сходах при виході з ладу механізму крокування Виконання ведомої опори з можливістю створення підйомної сили дозволяв переміщення по воді і в повітрі Такий спосіб доцільно використати для переміщення по сходах інвалідів мускульною силою, для переміщення по сходах в будинках, котрі не мають ліфтів, для переміщення по дорозі зміною кроку між упорами, який дозволяє зміну величини тягової сили На фіг 1 показаний спосіб переміщення по сходах і рушій поз 1 - вид спереду на рушій, поз 2 - вид зверху, поз 3 - варіант виконання рушія Рушій має механізм крокування 1, дві опорні частини, складені з упорів 2, відомих опор 3, і шарнірних валів 4 Опорна частина має упорний стан на сходах взаємодією упора з площадкою східця, взаємодією ведомої опори з двома вершинами СХІДЦІВ І енергією ваги, яка приходиться на шарнірний вал Механізм крокування виконаний з можливістю переміщення шарнірного валу по криволінійній траєкторії Він може бути виконаний з можливістю переміщення , шарнірного валу по траєкторії переміщення опорної частини по опорному середовищі Механізм крокування виконаний з можливістю зміни кроку між шарнірними валами в межах граничних величин Спосіб переміщення виконують шляхом установки одної опорної частини рушія в упорному стані через упор 2 і другої опорної частини рушія в опорному стані, а упора в неопорному стані на відстані від упорного стану на крок Ка'і переміщення опорної частини віз опорного стану через опору 3 на вершині опорного середовища, переміщенням упора, від неопорного стану в упорний стан на крок Ка'і, після переміщення опорної частини і упора від одної до другої ділянки опорного середовища на крок Кої в період переміщення другої опорної частини від опорного стану переміщенням упора від неопорного стану на крок Ка'г в упорний стан, або в період розташування другої опорної частини в упорному стані через упор, або в період переміщення другої опорної частини від упорного стану через упор на крок За'2 в опорний стан і до переміщення одної опорной частини від упорного стану через упор на крок За'і в опорний стан Один крок упора За'2 переміщенням від упорного в неопорний стан виконують при руху вверх по сходах механізмом крокування 1 зменшенням кроку між шарнірними валами 4 на крок За Другий крок упора Ко'2 виконують механізмом крокування переміщенням упора в неопорному стані від нижнього до верхнього східця з одночасною зміною крону між шарнірними валами механізмом дренування За + Ко Третій крок упора Ка'г виконують переміщенням упора від неопорного в упорний стан зменшенням кроку між шарнірними валами величиною Ка а одночасною зміною кроку між шарнірними валами За + Ко - Ка Один і третій кроки упора Ка'г і За'2 на одній ДІЛЯНЦІ опорного середовища і на двох ділянках виконують взаємодією веденої опори з вершинами двох СХІДЦІВ сходів в протилежних напрямках На фіг 2 показаний спосіб переміщання по землі і рушай поз 1 - вид збоку на рушій, коли обидві опорні частини знаходяться в упорному стані, поз 2 - вид збоку на рушій, коли одна опорна частина знаходиться в опорному стані, а друга в упорному стані, поз 3 - вид збоку на рушій після виконання трьох кроків упора, поз 4 - вид зверху на рушій Рушій має механізм крокування 1, дві опорні частини, складені з упорів 2, ведомих опор 3 і шарнірних валів 4 Опорна частина має упорний стан на землі взаємодією ведомої опори, яка виконана у вигляді гладкого катка на ВІСІ, яка не приводна, з верхнім шаром ґрунту, взаємодією ведомої опори, яка має центр обертання в центрі ВІСІ катка,для виконання одинакових траєкторій переміщення упора в опорний стан і від нього Рух по землі виконують так Рух починають, коли обидві опорні частини знаходяться в стійкому опорному стані /поз 1, поз 3 / Один крок За' /поз 2/ - переміщення упора від упорного стану в неопорний стан виконують зменшенням кроку між шарнірними валами на крок За Другий дрож Ко' - переміщенням упора в неопорному стані від одної до другої ділянки опорного середовища виконують зменшенням кроку між шарнірними валами на крок Ко Третій крок Ка' - переміщення упора від неопорного стану в упорний стан /поз 3/ виконують збільшенням кроку між шарнірними валами на крок Ка Один і третій кроки на одній ДІЛЯНЦІ опорного середовища і на двох ділянках виконують взаємодією одною і тою же ведомою спорова верхнім шаром землі і в протилежних напрямках 48987 4 ФІГ.1 48987 I 10 1 ~T Фіг 2 -I ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of stepping motion and kozaks stepping mechanism
Автори англійськоюKozak Andrii Mykhailovych
Назва патенту російськоюСпособ шагового движения и движитель козака для шагового движения
Автори російськоюКозак Андрей Михайлович
МПК / Мітки
МПК: B62D 57/00, B62K 3/00, A61G 5/00
Мітки: козака, спосіб, рушій, руху, крокуванням, крокування
Код посилання
<a href="https://ua.patents.su/5-48987-sposib-rukhu-krokuvannyam-i-rushijj-kozaka-dlya-krokuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб руху крокуванням і рушій козака для крокування</a>
Гіровібраційний рушій повздовжнього і криволінійного руху
Номер патенту: 36021
Опубліковано: 16.04.2001
Автор: Жуковський Леонід Михайлович
МПК: G01C 19/00, B64G 1/28
Мітки: повздовжнього, руху, криволінійного, гіровібраційний, рушій
Текст:
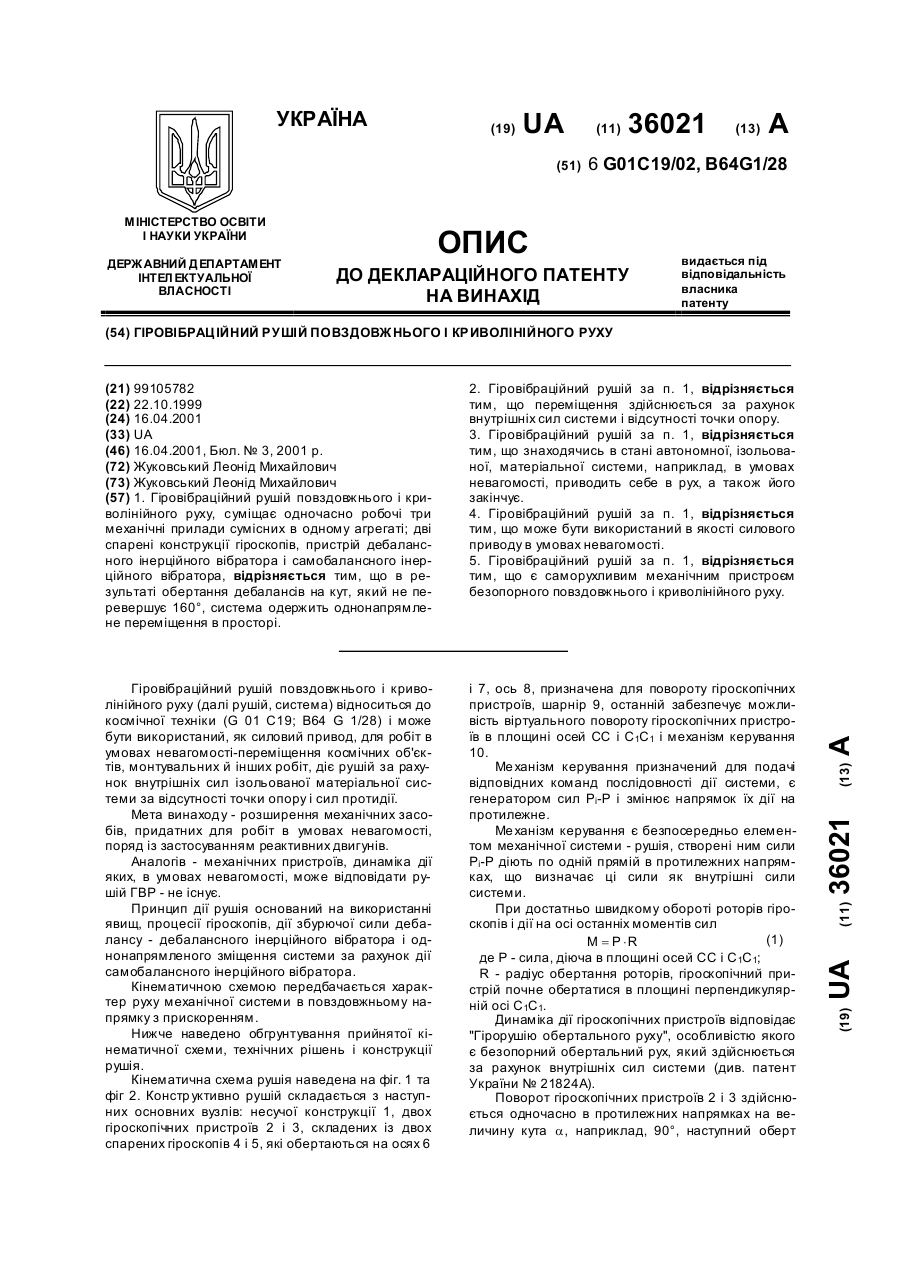
...дію; - оберти ротора гіроскопа по колу рад. R., при якому виникає збурююча сила F, даний пристрій працює як дебалансний інерційний вібратор; - спарена робота двох гіроскопічних пристроїв обертання останніх по колу рад. R, в даному разі пристрій працює як самобалансуючий інерційний вібратор. Останній здійснює однонапрямлене безопорне зміщення агрегату, яке досягається за рахунок повороту гіроскопічних пристроїв на кут менше a=160°....
Підйомний пристрій механізма крокування
Номер патенту: 16875
Опубліковано: 29.08.1997
Автори: Кочергін Борис Михайлович, Макаров Віктор Михайлович
МПК: E02F 9/02
Мітки: пристрій, підйомний, крокування, механізма
Формула / Реферат:
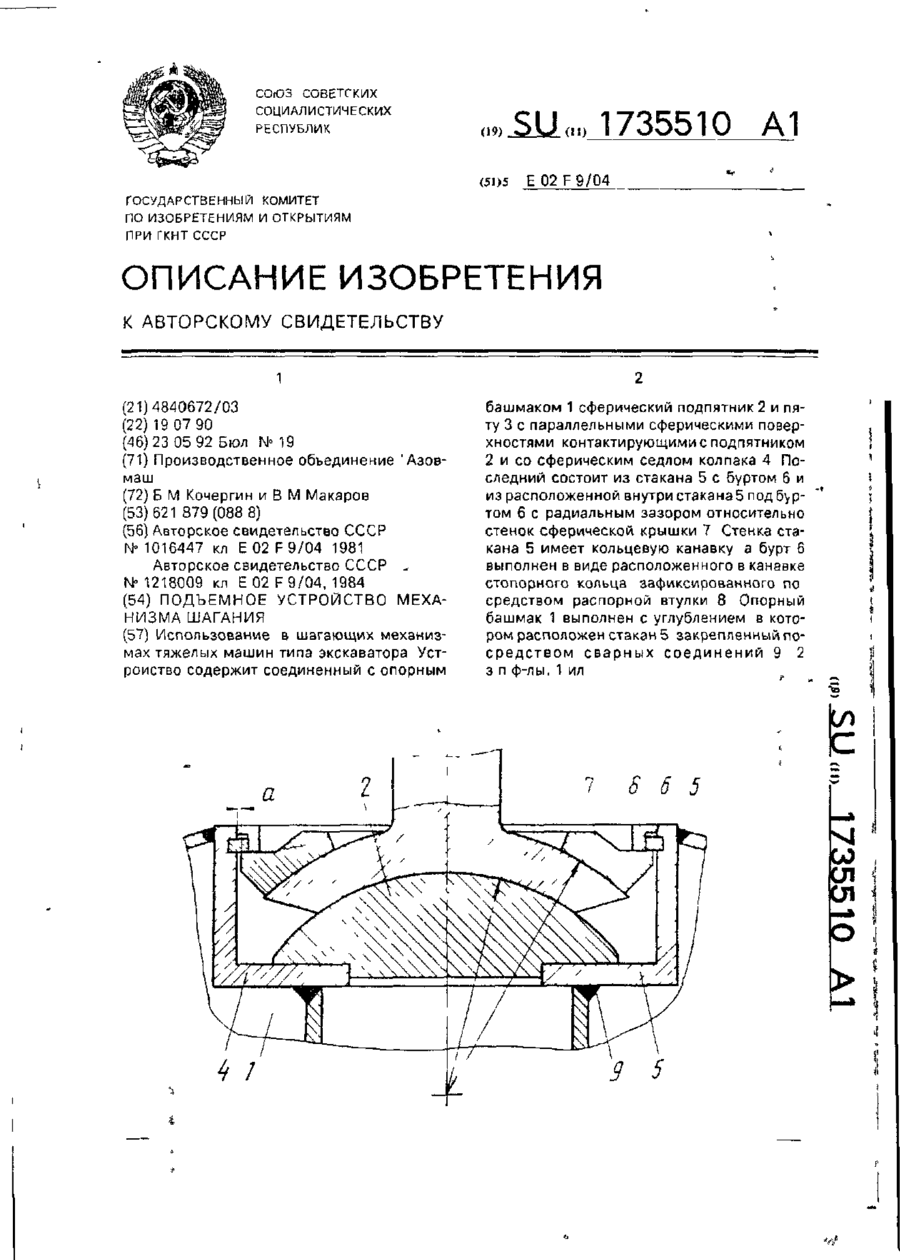
1. Подъемное устройство механизма шагания, включающее соединенный с опорным башмаком сферический подпятник и пяту с параллельными сферическими поверхностями, контактирующими со сферическим подпятником и со сферическим седлом колпака, отличающееся тем, что, с целью повышения долговечности, снижения трудоемкости изготовления, монтажа и демонтажа, колпак выполнен составным из стакана с буртом и из расположенной внутри стакана под буртом с...
Електродинамічний сповільнювач руху вагонів
Номер патенту: 21652
Опубліковано: 16.10.2000
Автори: Берестов Ігор В'ячеславович, Колесник Анатолій Петрович, Мороз Володимир Ілліч, Нагорний Євген Васильович, Братченко Олександр Васильович, Соболєв Юрій Володимирович, Бабаєв Михайло Михайлович, Панасенко Микола Васильович, Шуть Юрій Олександрович
Мітки: руху, вагонів, електродинамічний, сповільнювач
Формула / Реферат:
Электродинамический замедлитель вагонов, содержащий электромагнит, отличающийся тем, что он снабжен связанными между собой модулями, между которыми расположена рельсовая колея, причем каждый модуль содержит электромагнит с ферромагнитными сердечниками и полюсными наконечниками, контактирующими с лыжей, закрепленной к нижней поверхности платформы, с возможностью перемещения последней вдоль ходового рельса по направляющим и выполненной с пазом...
Роторно-гвинтовий рушій

Номер патенту: 12583
Опубліковано: 11.10.1999
Автор: Синельник Анатолій Іванович
МПК: F01C 1/00, B64C 11/00
Мітки: рушій, роторно-гвинтовий
Формула / Реферат:
Роторно-гнинтовинй рушій, що містить ведучий вал і ротори, які з'єднані зі втулкою з можливістю вільного обертання відносно осей симетрії роторів і радіально розташовані відносно ведучого валу, який відрізняється тим, що ведучий вал з'єднаний зі втулкою з можливістю вільного обертання відносно втулки, а ротори зв'язані з ведучим валом механічними передачами.
Гусеничний рушій транспортного засобу
Номер патенту: 12776
Опубліковано: 28.02.1997
Автор: Фомин Леонід Устинович
МПК: B62D 55/00, B62D 55/18
Мітки: засобу, гусеничний, транспортного, рушій
Формула / Реферат:
Гусеничный движитель транспортного средства, содержащий параллельно расположенные основные и дополнительные ходовые тележки, охваченные гусеничными лентами с опорными башмаками, и приспособления для разъемного соединения дополнительных тележек, каждое из которых выполнено из квадратного отверстия на дополнительной тележке и из телескопического, снабженного механизмом возвратно-поступательного движения элемента, закрепленного горизонтально на...
Попередній патент: Препарат для лікування серцево-судинних захворювань’кардіофіт”
Наступний патент: Спосіб відробки камерного запасу корисних копалин
Випадковий патент: Кришка люка оглядового колодязя