Пристрій для керування багатофункціональним біоелектричним протезом
Номер патенту: 49352
Опубліковано: 26.04.2010
Автори: Порван Андрій Павлович, Висоцька Олена Володимирівна, Чернишев Сергій Олександрович, Чернишев Олександр Олександрович, Чернишев Валерій Петрович
Формула / Реферат
Пристрій для керування багатофункціональним біоелектричним протезом, що містить блок виділення біоелектричного керуючого сигналу, у який входять послідовно з'єднані система знімання сигналів, підсилювач і детектор, двоканальний комутатор, виконаний, наприклад, у вигляді блоку декількох реле, що мають дві групи контактів, кожна з яких з'єднана із блоком виконавчих механізмів, наприклад, електроприводів, багатопозиційний перемикач, що містить декілька, відповідно до кількості виконавчих механізмів, контактних площадок, що через реле й першу групу контактів двоканального комутатора з'єднаний із блоком виконавчих механізмів, а через другу групу контактів з'єднаний з датчиками зворотного зв'язку, підсилювач потужності, який зв'язаний через першу групу контактів двоканального комутатора із блоком виконавчих механізмів, а також джерело живлення, виходи якого з'єднані з багатопозиційним перемикачем і з реле двоканального комутатора, який відрізняється тим, що в нього уведений блок керування, вхід якого зв'язаний з виходом детектора, а вихід з'єднаний із входом підсилювача потужності, крім того, блок керування містить формувач сигналу, перший і другий діоди, блок перетворення двополярного живлення з однополярного, компаратори високого й низького рівня, вузол формування й затримки сигналів керування, одновібратор із двома входами, тригер, керуючий роботою підсилювача потужності, причому виходи формувача сигналів з'єднані із входами компараторів високого й низького рівня, а також із входом одновібратора, вихід якого з'єднаний із входом підсилювача потужності, вихід компаратора високого рівня з'єднаний із входом тригера, а вихід компаратора низького рівня через перший діод, вузол формування й затримки сигналів керування й другий діод з'єднаний із другим входом одновібратора, інший вихід вузла формування й затримки сигналів керування з'єднаний із другим входом тригера, відповідні виходи якого з'єднані із входами підсилювача потужності.
Текст
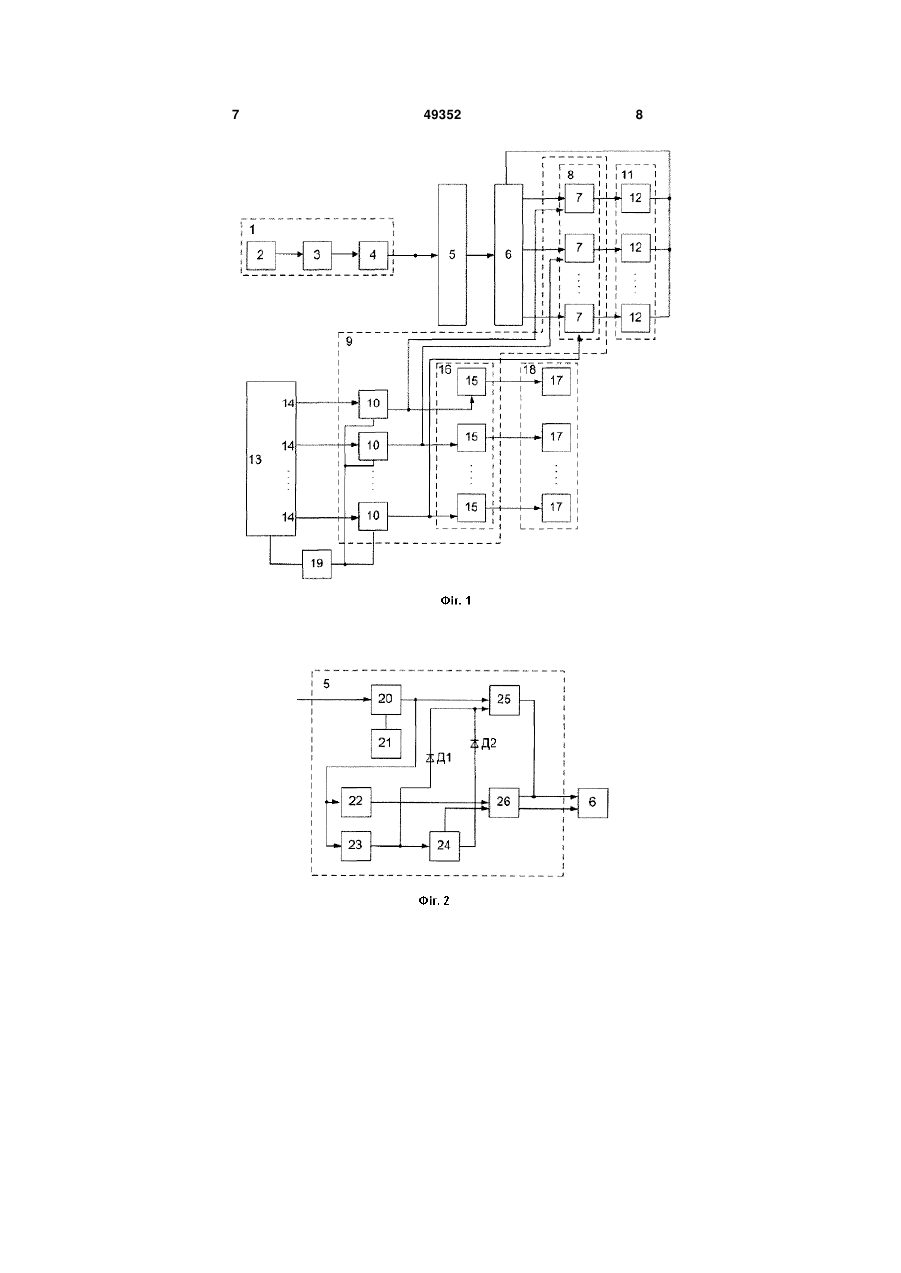
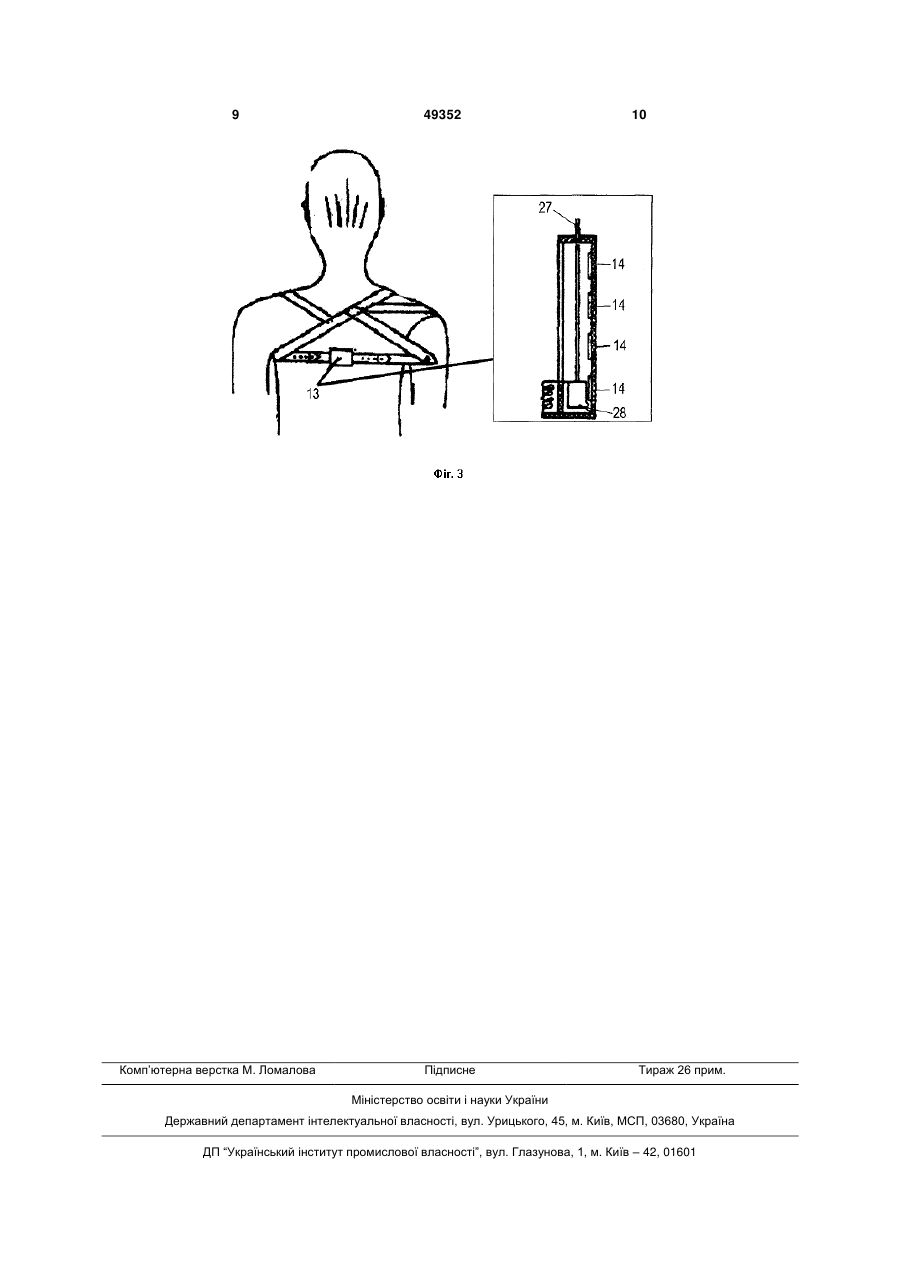
Пристрій для керування багатофункціональним біоелектричним протезом, що містить блок виділення біоелектричного керуючого сигналу, у який входять послідовно з'єднані система знімання сигналів, підсилювач і детектор, двоканальний комутатор, виконаний, наприклад, у вигляді блоку декількох реле, що мають дві групи контактів, кожна з яких з'єднана із блоком виконавчих механізмів, наприклад, електроприводів, багатопозиційний перемикач, що містить декілька, відповідно до кількості виконавчих механізмів, контактних площадок, що через реле й першу групу контактів двоканального комутатора з'єднаний із блоком виконавчих механізмів, а через другу групу контактів з'єднаний з датчиками зворотного зв'язку, підсилювач потужності, який зв'язаний через першу U 2 (19) 1 3 підсилювач потужності, зібрані на двох окремих друкованих платах. Плата підсилювача потужності розташовується в корпусі штучної кисті. Інші елементи системи керування зібрані в пластмасовому корпусі, розташованому на поверхні гільзи протеза. Формувач імпульсного сигналу перетворює біоелектричний сигнал м'язів в імпульсний, тривалість імпульсів якого пропорційна до величини, що обгинає біосигнал. Компаратори рівнів, таймер, тригер і схеми "&", залежно від величини й швидкості наростання біосигналу, визначають вид руху кисті (хват або розкриття). Підсилювач потужності зібраний за схемою мосту, у діагональ якого включений виконавчі механізм кисті - електромеханічний привід з реверсивним електродвигуном. Недоліком даного протеза є неможливість керування такими функціями протеза, як ротація передпліччя згинання-розгинання ліктя, ротація плеча. Найбільш близьким до пропонованого винаходу є пристрій для керування біоелектричними протезами (а.с. СССР №1456140 МКИ А 61 F 2/72, опубл. 07.02.1989 Бюл. №5), що містить двоканальний блок виділення біоелектричного керуючого сигналу, кожний канал якого виконаний у вигляді послідовно з'єднаних електродної системи знімання біопотенціалів, підсилювача й детектора, суматора й перетворювача, що через контакти першого каналу двоканального комутатора з'єднаний із блоком виконавчих механізмів, багатопозиційний перемикач, джерело живлення, генератор, блок датчиків сигналів зворотного зв'язку, причому багатопозиційний перемикач пов'язаний із джерелом живлення й двоканальним комутатором, виконаним у вигляді блоку реле із двома групами контактів, причому вхід генератора сигналу зворотного зв'язку з'єднаний з виходом суматора, а вихід через контакти другого каналу комутатора - з датчиками зворотного зв'язку. Недоліком цього пристрою є обмежені функціональні можливості, тому що він не дозволяє управляти декількома функціями протеза біопотенціалами від одного усіченого м'яза. Технічною задачею корисної моделі є створення багатофункціонального біоелектричного протеза руки, що керується від одного усіченого м'яза. Ця задача вирішена таким чином. У пристрій для керування багатофункціональним біоелектричним протезом, що містить блок виділення біоелектричного сигналу, що керує у який входять послідовно з'єднані система знімання сигналів, підсилювач і детектор, вихід детектора з'єднані із входом генератора зворотного зв'язку, двоканальний комутатор, що виконаний, наприклад, у вигляді блоку декількох реле, що мають дві групи контактів, кожна з яких з'єднана із блоком виконавчих механізмів, наприклад, електроприводів, багатопозиційний перемикач, що містить декілька, відповідно до кількості виконавчих механізмів, контактних площадок, що через реле й перший блок контактів двоканального комутатора з'єднаний із блоком виконавчих механізмів, а через другий блок контактів з'єднаний з датчиками зворотного зв'язку, підсилювач потужності, який зв'язаний че 49352 4 рез перший блок контактів двоканального комутатора із блоком виконавчих механізмів, а також джерело живлення, виходи якого з'єднані з багатопозиційним перемикачем і з реле двоканального комутатора, згідно запропонованому технічному рішенню, у нього введено блок керування, вхід якого пов'язаний з виходом детектора, а вихід з'єднаний із входом підсилювача потужності, крім того, блок керування містить формувач сигналу, перший і другий діоди, блок перетворення двополярного живлення з однополярного, компаратори високого й низького рівня, вузол формування й затримки сигналів керування, одновібратор із двома входами, тригер, що керує роботою підсилювача потужності, причому виходи формувача сигналів з'єднані із входами компараторів високого й низького рівня, а також із входом одновібратора, вихід якого з'єднаний із входом підсилювача потужності, вихід компаратора високого рівня з'єднаний із входом тригера, а вихід компаратора низького рівня через перший діод, вузол формування й затримки сигналів керування й другий діод з'єднаний із другим входом одновібратора, інший вихід вузла формування й затримки сигналів керування з'єднаний із другим входом тригера, відповідні виходи якого з'єднані із входами підсилювача потужності. На Фіг.1 зображена функціональна схема пристрою для керування багатофункціональним біоелектричним протезом. На Фіг.2 зображена функціональна схема блоку керування. На Фіг.3 зображений пристрій підключення виконавчих механізмів. Багатофункціональний біоелектричний протез руки, яким керують від одного усіченого м'яза, містить блок виділення біоелектричного керуючого сигналу 1 (Фіг.1), у який входять послідовно з'єднані система знімання сигналів 2, підсилювач 3 і детектор 4; комутатор 9, виконаний, наприклад, у вигляді блоку декількох реле 10, що мають контакти 7 (перший блок контактів 8) і контакти 15 (другий блок контактів 16), при цьому контакти 7 з'єднані з виконавчими механізмами 12 (блок виконавчих механізмів 11), а контакти 15 з'єднані з датчиками зворотного зв'язку 17 (блок датчиків зворотного зв'язку 18); багатопозиційний перемикач 13, що відповідно до кількості виконавчих механізмів містить кілька контактних площадок 14, і який через реле 10 і перший блок контактів 8 двоканального комутатора з'єднаний із блоком виконавчих механізмів 11, а через другий блок контактів 16 з'єднаний з датчиками зворотного зв'язку 17 блоку зворотного зв'язку 18; підсилювач потужності 6, зв'язаний через перший блок контактів 8 двоканального комутатора із блоком виконавчих механізмів 11; джерело живлення 19, виходи якого з'єднані з багатопозиційним перемикачем 13 і з реле 10 двоканального комутатора; блок керування 5, вихід який з'єднаний із входом підсилювача потужності 6. Блок керування 5 (Фіг.2) складається з формувача сигналу 20, вихід якого з'єднаний із входами компараторів високого рівня 22, низького рівня 23 і одним із входів одновібратора 25, до формувача 5 сигналу 20 підключений перетворювач двополярного живлення з однополярного 21, вихід компаратора високого рівня 22 підключений до одному із входів тригера 26, що є керуючим підсилювачем потужності 6, вихід компаратора низького рівня 23 підключений до схеми формування й затримки сигналу керування 24 і через перший діод Д1 до другого входу одновібратора 25, один з виходів схеми формування й затримки сигналу керування 24 підключений до другого входу тригера 26, другий вихід схеми формування й затримки сигналу керування 24 через другий діод Д2 підключений до другого входу одновібратора 25, вихід одновібратора 25 підключений до першого входу підсилювача потужності 6, один вихід тригера 26 підключений до першого входу підсилювача потужності 6, а другий вихід - до другого входу підсилювача потужності 6. Контактний елемент 28 (Фіг.3) з'єднаний із джерелом живлення 19 (Фіг.1), а контактні площадки 14 відповідно з елементами 10 комутації блоку комутатора 9, як такі можуть бути використані, наприклад, реле, що мають дві пари незалежних контактів, що працюють на замиканні. Через одну пару контактів 7 першого каналу 8 комутатора 9 здійснюється зв'язок підсилювача потужності 6 із блоком виконавчих механізмів 11. Через другі пари контактів 15 другого каналу 16 комутатора 9 здійснюється зв'язок із входами датчиків 17, що входять до складу блоку 18 датчиків зворотного зв'язку. Як датчики зворотного зв'язку 17 можуть бути використані, наприклад, світлодіоди або вібродатчики. Багатопозиційний перемикач 13 може бути встановлений у будь-якому, зручному для інваліда, місці, наприклад, у міжлопаточній області спини (Фіг.3). Розглянемо більш докладно роботу багатофункціонального біоелектричного протеза руки, що керується від одного усіченого м'яза. Для підключення до системи керування того або іншого виконавчого механізму 12 із блоку виконавчих механізмів 11, інвалід переміщає тягу 27 (Фіг.3) і разом з нею контактний елемент 28 багатопозиційного перемикача 13 на певну відстань, незначною напругою м'язів спини, підключає при цьому до джерела живлення 19 ту або іншу контактну площадку 14 багатопозиційного перемикача 13. При цьому спрацьовує відповідне реле 10 з комутатора 9, замикаючи відповідно свої пари контактів 7 і 15, і підключає до підсилювача потужності б відповідний електропривод 12 і відповідний йому датчик зворотного зв'язку 17. Орієнтуючись на реакцію датчика зворотного зв'язку 17 (вібросигнал або світіння світлодіода) блоку 18, інвалід контролює правильність підключення потрібного йому виконавчого механізму. Наприклад, підключення виконавчого механізму хвата - розкриття кисті здійснюється наступним чином. Переміщенням тяги 27 багатопозиційного перемикача 13 інвалід замикає контактний елемент 28 і першу контактну площадку 14 (Фіг.3), і підключає тим найперше реле 10 з комутатора 9 до джерела живлення 19. При цьому спрацьовує перша 49352 6 пара контактів 7 першого каналу комутатора 8, і підключає виконавчий механізм кисті із блоку 11 до підсилювача потужності 6. Одночасно спрацьовує друга пара контактів 15 із блоку 16, що підключає перший датчик 17 блоку 18 датчиків зворотного зв'язку. Скорочуючи функціональної м'яз, що залишився, інвалід посилає біоелектричний сигнал через електронну систему знімання біопотенціалів 2 (Фіг.1), підсилювач біопотенціалів 3 і детектор 4 на формувач сигналу 20 (Фіг.2) блоку керування 5, що формує сигнал залежно від амплітуди й тривалості поданого на його вхід сигналу. Так, наприклад, для здійснення розкриття кисті виконується швидке скорочення керуючого м'яза з більшим зусиллям, 70%-80% від максимального зусилля, за час не більше 0,15с. При цьому формувач сигналу 20 видає короткий імпульс із великою амплітудою. Цей сигнал подається на входи компараторів високого 22 і низького 23 рівнів і на перший вхід одновібратора 25. У результаті подачі сигналу на вхід компаратора високого рівня 22 з його виходу знімається сигнал (імпульс), що надходить на вхід тригера 26, що управляє підсилювачем потужності 6, у результаті чого тригер 26 встановлюється в положення, при якому підсилювач потужності 6 буде управляти рухом приводу кисті, що відповідає її розкриттю. Одночасно на вхід підсилювача потужності 6 приходить імпульсний сигнал з одновібратора 26, що видає сигнали при наявності на його входах сигналів з формувача сигналів 20 і розв'язного сигналу, що приходить через компаратор низького рівня 23 і перший діод Д1. Сигнал з компаратора низького рівня 23 не змінить стан тригера 26, тому що буде затриманий лінією затримки 24 на тривалість більше 0,15с. При здійсненні хвата кисті інвалід скорочує м'яз із малим зусиллям (30%-50% від максимального зусилля) не залежно від тривалості поданого сигналу. При цьому з виходу формувача сигналів 20 сигнал малої амплітуди подається на вхід компараторів високого 22 і низького 23 рівнів. Компаратор високого рівня 22 не змінить свого стану, а компаратор низького рівня 23 через лінію затримки 24 і другий діод Д2 видасть сигнал на дозвіл роботи одновібратора 25 і через схему формування й затримки сигналу керування 24 сигнал подається на вхід тригера 26, який встановиться таким чином, що підсилювач потужності 6 буде працювати в режимі хвата кисті. При цьому після початку руху пальців кисті можна збільшити зусилля скорочення м'яза до максимального, що приведе до збільшення швидкості руху пальців кисті. Таким чином можливо управляти швидкістю переміщення пальців кисті. Підключення й керування ротацією передпліччя, згинанням і розгинанням у ліктьовому шарнірі, ротацією плеча здійснюється аналогічним образом. Як видно з вищесказаного, авторам удалося створити багатофункціональний біоелектричний протез руки, що керується біопотенціалами від одного усіченого м'яза. 7 49352 8 9 Комп’ютерна верстка М. Ломалова 49352 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of an multipurpose bioelectric artificial limb
Автори англійськоюChernyshev Valerii Petrovych, Chernyshev Oleksandr Oleksandrovych, Chernyshev Serhii Oleksandrovych, Vysotska Olena Volodymyrivna, Porvan Andrii Pavlovych
Назва патенту російськоюУстройство для управления многофункциональным биоэлектрическим протезом
Автори російськоюЧернышев Валерий Петрович, Чернышев Александр Александрович, Чернышев Сергей Александрович, Высоцкая Елена Владимировна, Порван Андрей Павлович
МПК / Мітки
МПК: A61F 2/72
Мітки: протезом, керування, багатофункціональним, пристрій, біоелектричним
Код посилання
<a href="https://ua.patents.su/5-49352-pristrijj-dlya-keruvannya-bagatofunkcionalnim-bioelektrichnim-protezom.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування багатофункціональним біоелектричним протезом</a>
Спосіб бекірова керування багатофункціональним перетворювачем напруги
Номер патенту: 5864
Опубліковано: 15.03.2005
Автор: Бекіров Ескендер Алімович
МПК: G05F 1/56, H02M 7/00, H02M 3/335
Мітки: бекірова, багатофункціональним, напруги, керування, перетворювачем, спосіб
Формула / Реферат:
Спосіб керування багатофункціональним перетворювачем напруги, який включає генерування трикутних імпульсів, а також генерування синхронізованих з ними прямокутних імпульсів, широтно-імпульсне модулювання і формування імпульсів, що задають, що включає перетворення сигналу зворотного зв'язку трансформатора струму, включеного в схему вихідного підсилювача потужності, який відрізняється тим, що перетворення сигналу зворотного зв'язку здійснюють...
Пристрій для дистанційного керування
Номер патенту: 30470
Опубліковано: 15.05.2002
Автори: Мірошников Олександр Вікторович, Столяренко Олександр Іванович, Янов Леонід Іванович, Карлюка Анатолій Сергійович
МПК: H02J 13/00
Мітки: дистанційного, керування, пристрій
Формула / Реферат:
1. Пристрій для дистанційного керування, що містить пульт керування, оснащений принаймні двома кнопками, генератор імпульсів та прийомний блок, що включає блок живлення, детектор наявності сигналів, блок блокування та блоки контролю, який відрізняється тим, що у прийомний блок додатково введені блок керованих ключів, прийомний регістр, розподільник і принаймні два блоки перевірки блоків контролю, а у ланцюзі кожної кнопки встановлений діод,...
Пристрій для автоматичного керування деревообробкою
Номер патенту: 29640
Опубліковано: 25.01.2008
Автори: Осадчий Сергій Іванович, Коропалов Сергій Анатолійович, Шаповалова Ірина Анатоліївна
МПК: G05B 13/02
Мітки: автоматичного, пристрій, деревообробкою, керування
Формула / Реферат:
Пристрій для автоматичного керування деревообробкою, який містить електропривод подачі, другий вхід якого з'єднаний з входом блока обмеження швидкості подачі, вихід електроприводу подачі підключений до входу редуктора приводу подачі, вихід редуктора з'єднаний з об'єктом керування, який містить електропривод головного руху, вихід якого з'єднаний з входом датчика струму, вихід якого з'єднаний з випрямлячем, який містить згладжуючий фільтр,...
Пристрій місцевого керування прохідницькими машинами
Номер патенту: 5816
Опубліковано: 15.03.2005
Автори: Мезніков Артур Володимирович, Стаднік Микола Іванович, Куралех Іван Іванович
МПК: G08C 19/16
Мітки: місцевого, керування, машинами, прохідницькими, пристрій
Формула / Реферат:
Пристрій місцевого керування прохідницькими машинами, що містить пульт місцевого керування з органами прямого керування і блок місцевого керування, який відрізняється тим, що блок місцевого керування виконаний у вигляді процесорного блоку, оснащеного перепрограмувальним мікроконтролером і окремим блоком живлення, при цьому входи процесорного блоку з'єднані з органами прямого керування і з блоком живлення, а виходи - із групою виконавчих...
Пристрій для керування асинхронним електроприводом
Номер патенту: 70074
Опубліковано: 15.09.2004
Автори: Кулік Анатолій Степанович, Нарожний Віталій Васильович, Лученко Олег Олексійович, Фірсов Сергій Миколайович, Гісцова Тетяна Іванівна
МПК: H02P 21/00
Мітки: керування, асинхронним, пристрій, електроприводом
Формула / Реферат:
Пристрій для керування асинхронним електроприводом, що складається з асинхронного двигуна, з'єднаного через пружну передачу з виконавчим механізмом, послідовно з'єднаних між собою регулятора швидкості, перетворювача координат і перетворювача енергії, вихід якого підключений до статорної обмотки асинхронного двигуна, датчика кута, механічно зв'язаного з ротором асинхронного двигуна, задатчика реактивного струму, вихід якого підключений до...
Попередній патент: Пристрій для автоматичної розробки рухів у колінному та кульшовому суглобах
Наступний патент: Автобус аеропортний – планування салону
Випадковий патент: Спосіб промислового формування свинцево-кислотних акумуляторів