Апаратно-програмний комплекс моніторингу та управління рухомими об’єктами
Номер патенту: 50277
Опубліковано: 25.05.2010
Автори: Трикоз Валерій Павлович, Кондратюк Василь Михайлович, Харченко Володимир Петрович, Куценко Олександр Вікторович, Вишнякова Євгенія Вікторівна, Васильєв Ігор Васильович, Ільницька Світлана Іванівна, Газнюк Максим Олександрович
Формула / Реферат
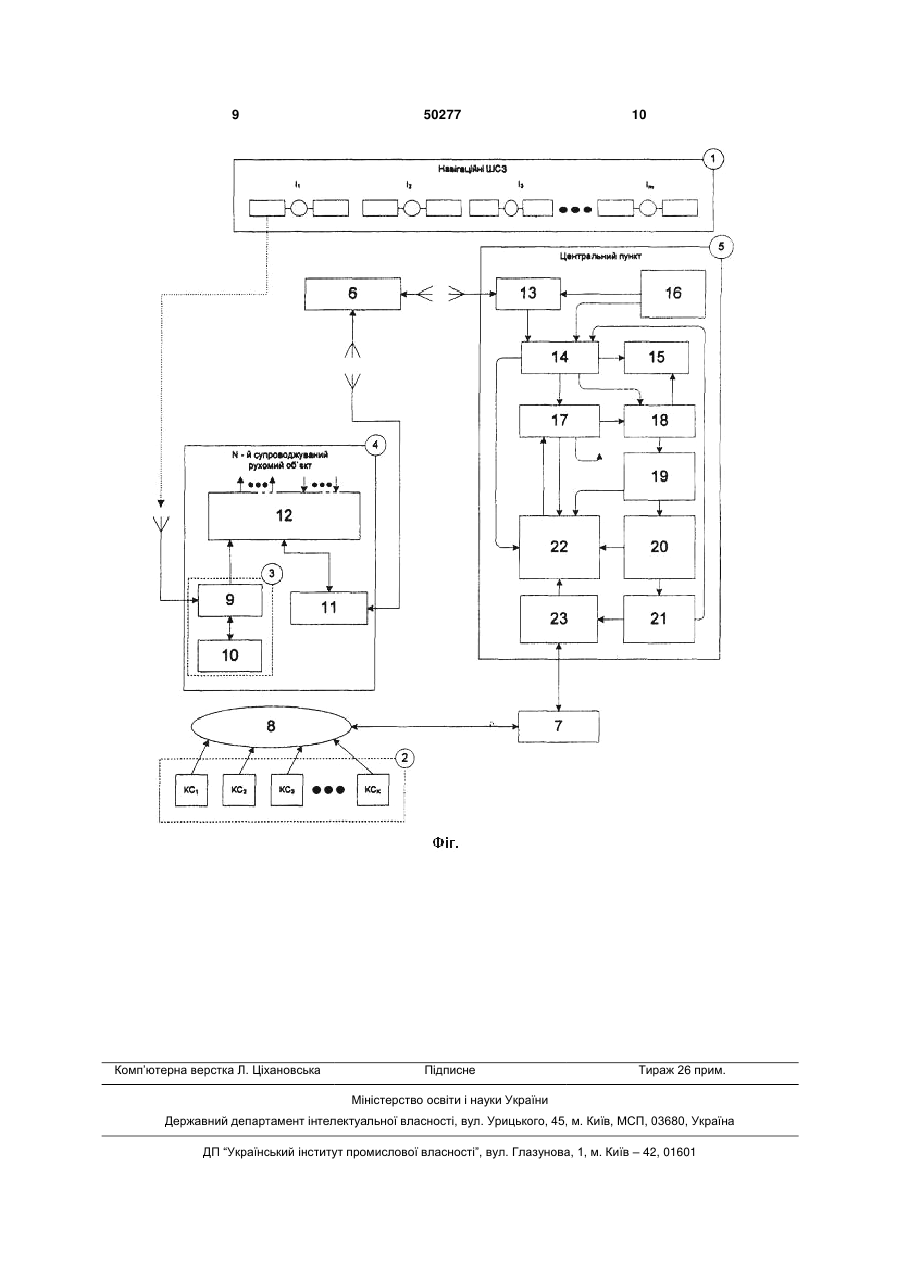
Апаратно-програмний комплекс моніторингу та управління рухомими об'єктами, що містить N супроводжуваних об'єктів, кожний з яких має радіомодем, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, датчик (GPS приймач), вихід якого є першим входом радіомодема, а на вхід цього датчика надходять навігаційні сигнали, які потрапляють у ширококутову діаграму спрямованості антен, що закріплені на кожному рухомому об'єкті, центральний пункт у складі каскадно з'єднаних радіомодема, на перший вхід якого через телекомунікаційні канали зв'язку надходять сигнали від радіомодемів, встановлених на N супроводжуваних рухомих об'єктах, пристрою обробки, вхід якого є виходом радіомодема, а вихід його є входом індикатора оператора центрального пункту, який відповідно ситуації через пульт керування змінює режими роботи блока керування, вихід якого є другим входом радіомодема, блок уточнення геометричних та кінематичних параметрів, перший вхід якого є виходом приладу зв'язку, другий вхід є першим додатковим виходом пристрою обробки, третій вхід є першим виходом бази даних електронних карт, четвертий вхід є першим виходом формувача вікна зони ситуаційної задачі, а п'ятий вхід є першим виходом блока гарантування точності вхідних даних, другий вихід якого є входом блока розв'язки ситуаційної задачі, перший та другий виходи якого, відповідно, є другим входом приладу зв'язку і другим входом пристрою обробки, третій та четвертий виходи якого, відповідно, зв'язані з першим входом бази даних електронних карт та першим входом виявника тривожної ситуації, другий вхід якого є другим виходом бази даних електронних карт, другий вхід якої є виходом блока уточнення геометричних та кінематичних параметрів, перший та другий входи формувача вікна зони ситуаційної задачі, відповідно, з'єднані з третім виходом бази даних електронних карт і другим виходом виявника тривожної ситуації, перший вихід якого є додатковим входом індикатора, перший вхід блока гарантування точності вхідних даних є другим виходом формувача вікна зони ситуаційної задачі, прилад зв'язку центрального пункту, який має двосторонню комутацію з окремою лінією зв'язку, що забезпечує доступ до сервера мережі Інтернет, куди надходять у реальному часі дані від К контрольних та опорних станцій, виходи яких передають прийняті сигнали від навігаційних ШСЗ через мережу Інтернет та окрему лінію зв'язку на прилад зв'язку центрального пункту, який відрізняється тим, що в нього додатково введений блок контролю та управління, який має двосторонню комутацію з радіомодемом, додаткові входи блока контролю та управління з'єднані з виходами датчиків, які провадять моніторинг стану рухомого об'єкта, додаткові виходи блока контролю та управління з'єднані з виконавчими пристроями, які виконують управління певними вузлами рухомих об'єктів, а також блок навігаційної системи (НС), який складається з датчика (GPS приймача) та інерційних датчиків, що пов'язані двостороннім зв'язком між собою з метою синхронізації навігаційного рішення.
Текст
Апаратно-програмний комплекс моніторингу та управління рухомими об'єктами, що містить N супроводжуваних об'єктів, кожний з яких має радіомодем, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, датчик (GPS приймач), вихід якого є першим входом радіомодема, а на вхід цього датчика надходять навігаційні сигнали, які потрапляють у ширококутову діаграму спрямованості антен, що закріплені на кожному рухомому об'єкті, центральний пункт у складі каскадно з'єднаних радіомодема, на перший вхід якого через телекомунікаційні канали зв'язку надходять сигнали від радіомодемів, встановлених на N супроводжуваних рухомих об'єктах, пристрою обробки, вхід якого є виходом радіомодема, а вихід його є входом індикатора оператора центрального пункту, який відповідно ситуації через пульт керування змінює режими роботи блока керування, вихід якого є другим входом радіомодема, блок уточнення геометричних та кінематичних параметрів, перший вхід якого є виходом приладу зв'язку, другий вхід є першим додатковим виходом пристрою обробки, третій вхід є першим виходом бази даних електронних карт, четвертий вхід є першим виходом формувача вікна зони ситуаційної задачі, а п'ятий вхід є першим виходом U 2 UA 1 3 також для контролю і управління станом рухомого об'єкту. Відома система для визначення місцезнаходження рухомих об'єктів, зокрема, транспортних засобів, що використовує глобальну навігаційну супутникову систему GNSS, наприклад GPS (Navstar), ГЛОНАСС, Галілео, що складається з I1,I2,I3,..., Im навігаційних штучних супутників Землі (ШСЗ), сигнали яких за допомогою встановленого на рухомому об'єкті приймача сигналів декількох навігаційних ШСЗ дозволяють визначити координати його миттєвого місцезнаходження [1]. Для підвищення точності визначення координат транспортних засобів у відомій системі додатково впроваджено опорний GPS приймач, координати місцезнаходження якого геодезично прив'язані і точно відомі. Недоліком відомої системи є те, що вартість апаратури формування диференційних виправлень на основі даних опорного GPS приймача на кілька порядків вища вартості самого мобільного GPS приймача. Крім цього, для забезпечення необхідної точності визначення координат багатьох супроводжуваних рухомих об'єктів у відомій системі потрібно реалізувати диференційний режим на кожному з них, що є економічно невигідним рішенням. Відома система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації яка містить центральний пункт рішення задач контролю, супроводження та управління рухомими об'єктами у складі; GPS приймача, робочої станції, яка складається з каскадно з'єднаних радіомодема, на перший та другий входи якого через лінії зв'язку надходять сигнали від кожного супроводжуваного рухомого об'єкту, пристрою обробки, вхід якого є виходом радіомодема, та індикатора, вхід якого є виходом пристрою обробки, супроводжуваного рухомого об'єкту у складі: радіомодема, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, і датчика (GPS приймача), вихід якого є першим входом радіомодема, а на вхід датчика (GPS приймача) надходять сигнали від навігаційних ШСЗ глобальної навігаційної супутникової системи, що знаходяться у зоні радіовидимості датчика (GPS приймача) [2]. Основними недоліками відомої системи є: недостатня точність і якість супроводження N транспортних засобів, що пов'язано з нестаціонарністю простору радіоканалу, стохастичністю та невизначеністю динаміки якості прийому сигналів з навігаційних ШСЗ, особливо в районах із значною забудовою, на різко пересіченій місцевості (яри, ліси, гори тощо), а також в умовах навмисного створення радіозавад, що у сукупності суттєво підвищує складність і знижує економічні показники такої системи. Найбільш близькою за технічною суттю до запропонованого комплексу є система диспетчерського керування рухомими об'єктами з використанням глобальної супутникової системи радіонавігації [3]. Відома система, що вибрана як найближчий аналог містить N супроводжуваних об'єктів, кожний з яких має радіомодем, на другий 50277 4 вхід якого через лінії зв'язку надходять сигнали з центрального пункту, датчик (GPS приймач), вихід якого є першим входом радіомодема. На вхід цього датчика надходять навігаційні сигнали, які потрапляють у ширококутову діаграму спрямованості антен, що закріплені на кожному рухомому об'єкті. Центральний пункт містить наступні каскадно з'єднані елементи: радіомодем, на перший та другий входи якого через телекомунікаційні канали зв'язку надходять сигнали від радіомодемів, які встановлені на N супроводжуваних рухомих об'єктах; пристрій обробки, вхід якого є виходом радіомодема, а вихід - входом індикатора оператора центрального пункту. Відповідно до ситуації індикатор оператора через пульт керування змінює режими роботи блока керування, вихід якого є третім входом радіомодема. Далі у каскаді іде блок уточнення геометричних та кінематичних параметрів, перший вхід якого є виходом приладу зв'язку, другий вхід є першим додатковим виходом пристрою обробки, третій вхід є першим виходом бази даних електронних карт, четвертий вхід є першим виходом формувача вікна зони ситуаційної задачі, а п'ятий вхід є першим виходом блока гарантування точності вхідних даних. Другий вихід блока гарантування точності вхідних даних є входом блока розв'язки ситуаційної задачі, перший та другий виходи якого, відповідно, є другим входом приладу зв'язку і другим входом пристрою обробки. Третій та четвертий виходи пристрою обробки зв'язані відповідно з першим входом бази даних електронних карт та першим входом виявника тривожної ситуації, другий вхід якого є другим виходом бази даних електронних карт, другий вхід якої є виходом блока уточнення геометричних та кінематичних параметрів. Перший та другий входи формувача вікна зони ситуаційної задачі з'єднані відповідно з третім виходом бази даних електронних карт і другим виходом виявника тривожної ситуації, перший вихід якого є додатковим входом індикатора. Перший вхід блока гарантування точності вхідних даних є другим виходом формувача вікна зони ситуаційної задачі. Прилад зв'язку центрального пункту має двосторонню комутацію з окремою лінією зв'язку, що забезпечує доступ до сервера мережі Інтернет, куди надходять у реальному часі дані від К контрольних та опорних станцій, а також L пунктів радіоспостереження, антени яких приймають сигнал від радіомаяка N-гo супроводжуваного рухомого об'єкта, а їх виходи передають прийняті сигнали радіомаяків через мережу Інтернет та окрему лінію зв'язку на прилад зв'язку центрального пункту. Основними недоліками найближчого аналогу є: відсутність можливості отримання і передачі системою інформації з датчиків контролю стану рухомих об'єктів, і відсутність можливості дистанційного керування деякими вузлами рухомого об'єкту. В основу корисної моделі поставлене завдання удосконалення системи диспетчерського керування рухомими об'єктами з використанням сигналів супутникової радіонавігаційної системи шляхом покращення надійності та точності навігаційного рішення рухомого об'єкту, забезпечення контролю 5 його стану і дистанційного керування виконавчими пристроями. Поставлена задача удосконалити корисну модель вирішується тим, що апаратно-програмний комплекс моніторингу та управління рухомими об'єктами містить N супроводжуваних об'єктів, кожний з яких має радіомодем, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, датчик (GPS приймач), вихід якого є першим входом радіомодема. На вхід цього датчика надходять навігаційні сигнали, які потрапляють у ширококутову діаграму спрямованості антен, що закріплені на кожному рухомому об'єкті. Центральний пункт містить наступні каскадно з'єднані елементи: радіомодем, на перший та другий входи якого через телекомунікаційні канали зв'язку надходять сигнали від радіомодемів, які встановлені на N супроводжуваних рухомих об'єктах; пристрій обробки, вхід якого є виходом радіомодема, а вихід - входом індикатора оператора центрального пункту. Відповідно до ситуації індикатор оператора через пульт керування змінює режими роботи блока керування, вихід якого є третім входом радіомодема. Далі у каскаді іде блок уточнення геометричних та кінематичних параметрів, перший вхід якого є виходом приладу зв'язку, другий вхід є першим додатковим виходом пристрою обробки, третій вхід є першим виходом бази даних електронних карт, четвертий вхід є першим виходом формувача вікна зони ситуаційної задачі, а п'ятий вхід є першим виходом блока гарантування точності вхідних даних. Другий вихід блока гарантування точності вхідних даних є входом блока розв'язки ситуаційної задачі, перший та другий виходи якого, відповідно, є другим входом приладу зв'язку і другим входом пристрою обробки. Третій та четвертий виходи пристрою обробки зв'язані відповідно з першим входом бази даних електронних карт та першим входом виявника тривожної ситуації, другий вхідякого є другим виходом бази даних електронних карт, другий вхід якої є виходом блока уточнення геометричних та кінематичних параметрів. Перший та другий входи формувача вікна зони ситуаційної задачі з'єднані відповідно з третім виходом бази даних електронних карт і другим виходом виявника тривожної ситуації, перший вихід якого є додатковим входом індикатора. Перший вхід блока гарантування точності вхідних даних є другим виходом формувача вікна зони ситуаційної задачі. Прилад зв'язку центрального пункту має двосторонню комутацію з окремою лінією зв'язку, що забезпечує доступ до сервера мережі Інтернет, куди надходять у реальному часі дані від К контрольних та опорних станцій, а також L пунктів радіоспостереження, антени яких приймають сигнал від радіомаяка N-гo супроводжуваного рухомого об'єкта, а їх виходи передають прийняті сигнали радіомаяків через мережу Інтернет та окрему лінію зв'язку на прилад зв'язку центрального пункту. Згідно з корисною моделлю додатково введений блок контролю та управління, який має двосторонню комутацію з радіомодемом, додаткові входи блоку контролю та управління з'єднані з виходами датчиків, які проводять моніторинг стану рухомого об'єкта, додаткові виходи блоку контро 50277 6 лю та управління з'єднані з виконавчими пристроями, що забезпечують управління певними вузлами рухомих об'єктів, а також блок навігаційної системи (НС), який складається з датчика (GPS приймача) та інерційних датчиків, що пов'язані двостороннім зв'язком між собою з метою синхронізації навігаційного рішення. На кресленні (Фіг.) наведена структурна схема апаратно-програмного комплексу моніторингу та управління рухомими об'єктами. Згідно креслення даний комплекс містить: m навігаційних ШСЗ (I1, Im ) глобальної навігаційної супутникової системи радіонавігації 1, К контрольних та опорних станцій (KC1 KCK ) диференційної наземної підсистеми глобальної супутникової системи радіонавігації 2, навігаційну систему З, N рухомих об'єктів 4 та центральний пункт 5, що поєднуються між собою телекомунікаційним каналом зв'язку 6, окрему лінію зв'язку 7, яка з'єднує центральний пункт 5 з мережею Інтернет 8, датчик (GPS приймач) 9, інерційні датчики 10, радіомодем 11, блок контролю та управління 12, який встановлений нa N-му рухомому об'єкті; радіомодем 13, пристрій обробки 14, індикатор оператора 15, блок і пульт управління 16, базу даних електронних карт 17, виявник тривожної ситуації 18, формувач вікна зони ситуаційної задачі 19, блок гарантування точності вхідних даних 20, блок розв'язку ситуаційної задачі 21, блок уточнення геометричних та кінематичних параметрів 22, прилад зв'язку 23. Порівняльний аналіз показує, що запропонований апаратно-програмний комплекс управління рухомими об'єктами відрізняється від найближчого аналогу "Система диспетчерського керування рухомими об'єктами з використанням сигналів глобальної супутникової системи радіонавігації" наявністю нових блоків і нових зв'язків між елементами системи, які забезпечують нові якісні властивості. Таким чином, запропонований комплекс має покращені навігаційні характеристики та забезпечує контроль параметрів рухомих об'єктів у будь-який проміжок часу і відповідає критерію "новизна". Комплекс працює наступним чином. При супроводженні рухомих об'єктів 4 використовується встановлена на них НС 3, що складається з датчика (GPS приймача) 9 та інерційних датчиків 10. Основні принципи визначення координат за допомогою глобальних навігаційних супутникових систем та інерційних навігаційних датчиків широко висвітлені в науково-технічній літературі [4,5,6,7]. НС 3 по навігаційним сигналам не менш ніж від чотирьох супутників (I1, I4 ) 1 визначає місцезнаходження N-гo рухомого об'єкта 4, а в разі наявності навігаційних сигналів менше ніж від чотирьох супутників (I1, I4 ) 1, або взагалі їх відсутності на деякий час, визначає місцезнаходження N-гo рухомого об'єкта 4 за допомогою інерційних датчиків 10. Блок моніторингу та управління 12 отримує із зовнішніх датчиків інформацію про параметри стану рухомого об'єкту, радіомодем 9 з заданою дискретністю передає інформацію з блоку моніторингу та управління через теле 7 комунікаційний канал зв'язку 6 на радіомодем 13 центрального пункту 5, де вони аналізуються у пристрої обробки 14, що об'єднаний з блоком керування 16. Результати відображаються на індикаторі 15 оператора комплексу, а в разі потреби записуються у базу даних електронних карт з S шарами 17. Точність визначення координат навігаційною системою складає 5-10м., а в ряді випадків, особливо під час руху транспортних засобів в умовах міста і сильно мінливої місцевості, де відбувається часткове або повне екранування сигналів навігаційних ШСЗ, а також при неможливості роботи GPS приймача на час зловмисного створення завад, завдяки включенню ІНС 10 до НС 3 рішення навігаційної задачі не припиняється, а продовжується з можливим незначним погіршенням точності навігаційних даних, що залежить від часу відсутності GPS сигналу, при локалізації об'єкта на електронній карті 17 диспетчерського пункту 5. У будь-яких непередбачених випадках виявник тривожної ситуації 18 активізує усі інформаційні ресурси центрального пункту 5 і тих контрольних та опорних станцій 2, що забезпечують підвищення точності визначення координат рухомих об'єктів 4, які відносяться до просторово-часового вікна ситуаційної задачі, що визначив формувач 19. За рахунок цілеспрямованої роботи блока гарантування точності вхідних даних 20, що потрібні блоку розв'язку ситуаційної задачі управління 21 у поточній тривожній ситуації, блок уточнення геометричних та кінематичних параметрів 22 реалізує процедури оптимального послідовного оцінювання невизначених параметрів супроводжуваного рухомого об'єкта 4. Обмін даними між контрольними та опорними станціями 2 і центральним пунктом 5 відбувається через мережу Інтернет 8 за допомогою приладу зв'язку 23 і окремої лінії зв'язку 7. Блок контролю та управління 12 являє собою вузол, що призначений для прийому і обробки цифрових даних і аналогових сигналів, що надходять з розташованих на рухомому об'єкті датчиків та 50277 8 передачі інформаційних повідомлень по телекомунікаційному каналу зв'язку 6 через радіомодеми 13 та 11 в пристрій обробки 14, а також блок контролю та управління 12 забезпечує обробку повідомлень, які надходять від блоку керування 16 по телекомунікаційному каналу зв'язку 6 через радіомодеми 13 та 11, та формування команд на виконавчі пристрої, які розташовані на рухомому об'єкті. Блок НС 3 являє собою вузол, що призначений для покращення надійності та точності навігаційного рішення під час руху транспортних засобів в умовах міста та гористої місцевості, де відбувається часткове або повне екранування сигналів навігаційних ШСЗ, що досягається за рахунок використання інерційних датчиків 10, що мають відмінну від датчика (GPS приймача) 9 природу вимірювань. Проведений аналіз відомих технічних рішень у даній галузі техніки показав, що сукупність ознак, яка відрізняє корисну модель від найближчого аналогу, має істотні відмінності. Джерела інформації6 1. Заявка WO №93/09446,. клас G01S5/00.5/14, 13.05.1993; 2. Патент ЕПВ №0512789, М. кл. G01S5/14, 5/00, 11.11.1992; 3. Патент №75709, (Україна) М. кл. GO 1S5/14, 15.05.2006; 4. Сетевые спутниковые радионавигационные системы / Под ред. В.С.Шебшаевича. 2-е изд. - М. Радио и связь, 1993. - 408с; 5. Гофман-Веленгоф Б., Колінз Д. Глобальна система визначення місцеположення (GPS) Теорія та практика. Пер. з англ. / Під ред, Я.Ц.Яцніна. - К.: Наук. Думка, 1996. - 387с; 6. Соловьев Ю.А. Системы спутниковой навигации. - М.: Зко-Тренд. 2000. - 267с; 7. Grewal М. S., Weill L. R., Andrews A. P. Global Positioning Systems, Inertial Navigation, and Integration. - 2nd ed. - A John Wiley & Sons, Inc., Publication, 2007. - 525 p. 9 Комп’ютерна верстка Л. Ціхановська 50277 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюHardware and software complex for monitoring and control of movable objects
Автори англійськоюKharchenko Volodymyr Petrovych, Kondratiuk Vasyl Mykhailovych, Hazniuk Maksym Oleksandrovych, Vyshniakova Yevhania Viktorivnal, Trykoz Valerii Pavlovych, Kutsenko Oleksandr Viktorovych, Vasyliev Ihor Vasyliovych, Ilnytska Svitlana Ivanivna
Назва патенту російськоюАппаратно-программный комплекс мониторинга и управления подвижными объектами
Автори російськоюХарченко Владимир Петрович, Кондратюк Василий Михайлович, Газнюк Максим Александрович, Вишнякова Евгения Викторовна, Трикоз Валерий Павлович, Куценко Александр Викторович, Васильев Игорь Васильевич, Ильницкая Светлана Ивановна
МПК / Мітки
МПК: G01S 5/14
Мітки: управління, апаратно-програмний, рухомими, комплекс, об'єктами, моніторингу
Код посилання
<a href="https://ua.patents.su/5-50277-aparatno-programnijj-kompleks-monitoringu-ta-upravlinnya-rukhomimi-obehktami.html" target="_blank" rel="follow" title="База патентів України">Апаратно-програмний комплекс моніторингу та управління рухомими об’єктами</a>
Багатоканальний вимірювальний апаратно-програмний комплекс для обробки радіолокаційної інформації
Номер патенту: 75152
Опубліковано: 15.03.2006
Автори: Володін Андрій Миколайович, Байздренко Олексій Олександрович
МПК: H04J 9/00, G06F 15/16, G01S 13/56
Мітки: комплекс, багатоканальний, радіолокаційної, обробки, інформації, апаратно-програмний, вимірювальний
Формула / Реферат:
Багатоканальний вимірювальний апаратно-програмний комплекс для обробки радіолокаційної інформації (РЛІ), що містить РЛС кругового огляду, блок обробки аналогової (координатної) радіолокаційної інформації РЛІ і блок обробки вторинної (трасової) радіолокаційної інформації, виконані на базі Intel-сумісних ЕОМ, що містять системний блок з набором модулів стандартної конфігурації, і які підключені до кожного системного блока відеомонітора,...
Апаратно-програмний комплекс “кондор”
Номер патенту: 29035
Опубліковано: 25.12.2007
Автори: Слюсар Олексій Анатолійович, Колосов Сергій Михайлович, Окончук Володимир Іванович, Кухтаров Сергій Андрійович, Єраков Валерій Анатолійович, Щучик Едуард Степанович, Гриценко Сергій Анатолійович
МПК: H04N 1/00
Мітки: кондор, комплекс, апаратно-програмний
Формула / Реферат:
1. Апаратно-програмний комплекс, що містить зчитувач документів, який відрізняється тим, що містить монітор, клавіатуру, маніпулятор типу "миша", а як зчитувач документів використано оптичний повносторінковий зчитувач із вбудованим промисловим комп'ютером.2. Апаратно-програмний комплекс за п. 1, який відрізняється тим, що як зчитувач документів використано зчитувач ВКС PR-03е.3. Апаратно-програмний комплекс за п. 1,...
Універсальний багатофункціональний телекомунікаційний апаратно-програмний комплекс
Номер патенту: 65501
Опубліковано: 15.03.2004
Автор: Непомящий Борис Олександрович
МПК: H04J 4/00, H04H 1/00, H04B 7/00
Мітки: універсальний, телекомунікаційній, апаратно-програмний, багатофункціональний, комплекс
Формула / Реферат:
Універсальний багатофункціональний телекомунікаційний апаратно-програмний комплекс, що складається з поєднаних із антенним полем та системою сполучення центрів управління системами супутникового зв'язку, підключення до мережі Інтернет та розподілу її ресурсів, місцевого, міжміського та міжнародного зв'язку, комутації, забезпечення мобільного зв'язку з рухомими об'єктами, радіомовлення, телебачення, мультимедіа, транкінгового, радіопошукового...
Система диспетчерського керування рухомими біологічними об`єктами з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 39917
Опубліковано: 25.03.2009
Автори: Погурельський Олексій Сергійович, Куценко Олександр Вікторович, Харченко Володимир Петрович, Вишнякова Євгенія Вікторівна, Трикоз Валерій Павлович, Кондратюк Василь Михайлович, Газнюк Максим Олександрович
МПК: G01S 5/14
Мітки: диспетчерського, використанням, глобальної, сигналів, система, рухомими, керування, радіонавігації, системі, об'єктами, супутникової, біологічними
Формула / Реферат:
Система диспетчерського керування рухомими біологічними об'єктами з використанням сигналів глобальної супутникової системи радіонавігації (GPS), що містить N супроводжуваних об'єктів, кожний з яких має радіомодем, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, датчик (GPS приймач), вихід якого є першим входом радіомодема, а на вхід цього датчика надходять навігаційні сигнали, які потрапляють у ширококутову...
Адаптивна нелінійна система управління
Номер патенту: 44723
Опубліковано: 12.10.2009
Автори: Шпак Ганна Сергіївна, Бандура Іван Миколайович, Дибська Ирина Юріївна
МПК: G05B 13/00
Мітки: адаптивна, система, нелінійна, управління
Формула / Реферат:
Адаптивна нелінійна система управління, що містить перший помножувач, вихід якого з'єднаний через паралельно включені диференціатор, інтегратор і підсилювач з входами першого суматора, а вихід якого підключений до першого входу другого помножувача, вихідний сигнал з цього помножувача сполучений з першим входом другого суматора, вихід якого з'єднаний через регулятор з входом об'єкта управління, вихід якого підключений до першого входу першого...
Попередній патент: Аналізатор факторного резонансу по куту атаки
Наступний патент: Радіочастотний логічний елемент
Випадковий патент: Спосіб лікування гнійних ран м'яких тканин у осіб похилого та старечого віку