Спосіб внесення мінеральних добрив в системі точного землеробства і машина для його здійснення
Номер патенту: 54049
Опубліковано: 17.02.2003
Автори: Мойсеєнко Володимир Костянтинович, Адамчук Валерій Васильович
Формула / Реферат
1. Спосіб внесення мінеральних добрив в системі точного землеробства, при якому проводять покоординатний аналіз вмісту поживних речовин у грунті, добрива вносять машиною, яка включає дозатор, обладнаний виконавчим механізмом та розсіваючий орган з висівною кромкою, з якої злітають (зсипаються) добрива на поверхню ґрунту, і в процесі її роботи, шляхом подачі команд на виконавчий механізм, змінюють дози добрив, що вносяться на ділянку поля з будь-якими координатами в залежності від вмісту відповідної поживної речовини у ґрунті на цій ділянці, який відрізняється тим, що формування команди для подачі на виконавчий механізм для встановлення необхідної дози добрив для внесення на ділянці з певними координатами починається тоді, коли висівна кромка машини знаходиться на відстані L до цієї ділянки, яка вимірюється паралельно лінії руху машини і визначається із співвідношення:
L = Vp(Т0 + Т1 + Т2)±I,
де Vp - робоча швидкість машини;
Т0 - час формування відповідної команди для подачі на виконавчий механізм;
Т1 - час, що витрачається на спрацювання дозатора, після надходження на виконавчий механізм відповідної команди;
Т2 - час, протягом якого частинка добрив, видана дозатором, переміщується до висівної кромки;
l - проекція віддалі, яку долає частинка у вільному польоті, від точки перетину нею висівної кромки до місця її зустрічі з поверхнею ґрунту, на лінію руху машини, причому знак плюс (+) застосовується, коли проекція відрізка l відкладається від висівної кромки проти напрямку руху машини, а знак мінус (-) - в напрямку її руху.
2. Машина для внесення мінеральних добрив в системі точного землеробства, яка включає бункер з дозатором, обладнаним виконавчим механізмом, розсіваючий орган з висівною кромкою, джерело інформації про покоординатний вміст поживних речовин у грунті, виконане у вигляді оптичного приладу, та комп'ютер, функціонально з'єднаний з джерелом інформації про покоординатний вміст поживних речовин у грунтів та виконавчим механізмом, який відрізняється тим, що джерело інформації про вміст поживних речовин у грунті встановлено попереду висівної кромки і закріплено з можливістю переміщення і фіксації для зміни віддалі L від нього до висівної кромки, виміряної паралельно напрямку руху машини.
3. Машина за п. 2, яка відрізняється тим, що відстань l від джерела інформації про вміст поживних речовин у грунті до висівної кромки, вимірюваної паралельно напрямку руху машини, визначається із співвідношення:
L = Vp(Т0 + Т1 + Т2)±I,
де Vp - робоча швидкість машини;
Т0 - час формування відповідної команди для подачі на виконавчий механізм;
Т1 - час, що витрачається на спрацювання дозатора, після надходження на виконавчий механізм відповідної команди;
Т2 - час, протягом якого частинка добрив, видана дозатором, переміщується до висівної кромки;
l - проекція віддалі, яку долає частинка у вільному польоті, від точки перетину нею висівної кромки до місця її зустрічі з поверхнею ґрунту, на лінію руху машини, причому знак плюс (+) застосовується, коли проекція відрізка l відкладається від висівної кромки проти напрямку руху машини, а знак мінус (-) - в напрямку її руху.
Текст
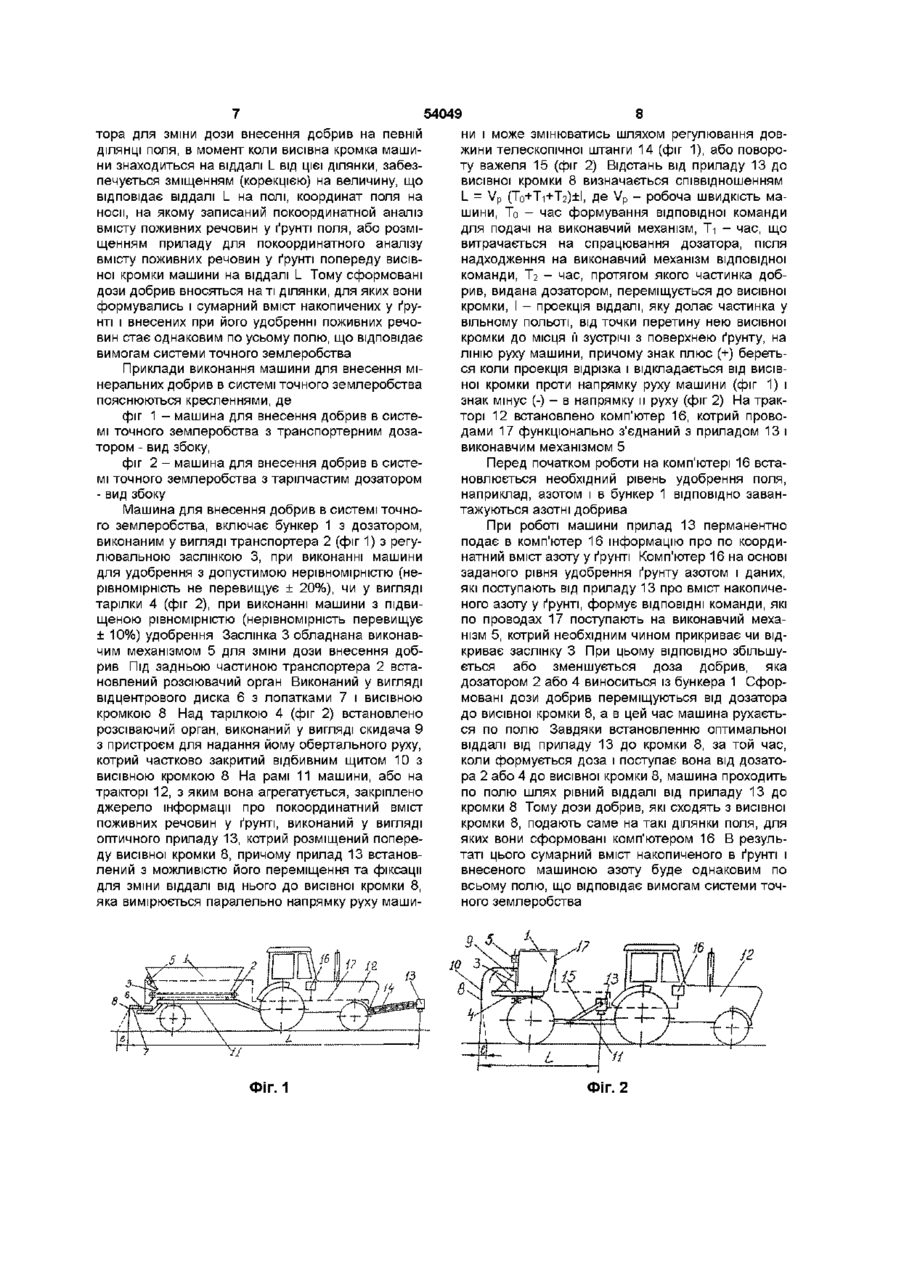
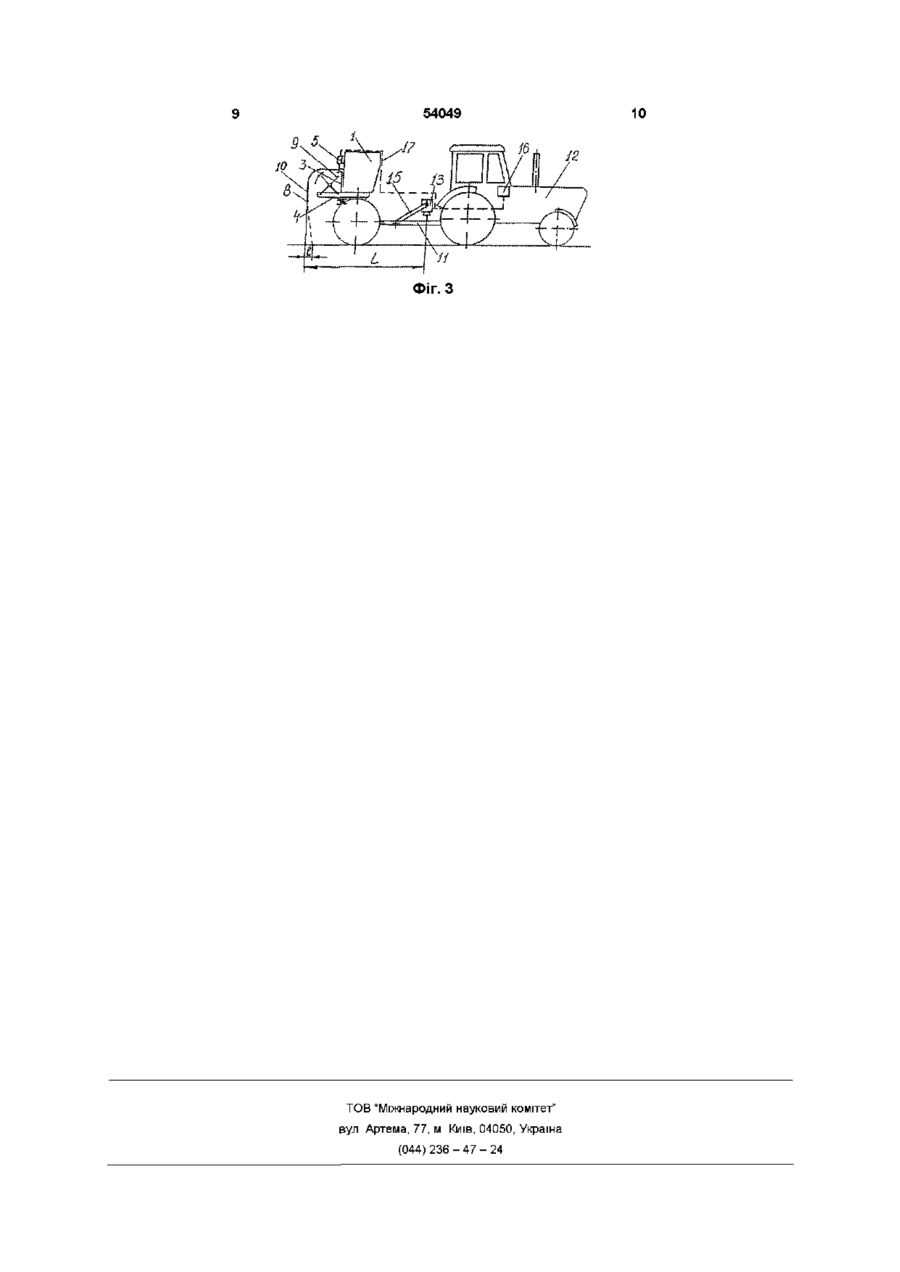
1 Спосіб внесення мінеральних добрив в системі точного землеробства, при якому проводять покоординатний аналіз вмісту поживних речовин у грунті, добрива вносять машиною, яка включає дозатор, обладнаний виконавчим механізмом та розсіваючий орган з висівною кромкою, з якої злітають (зсипаються) добрива на поверхню ґрунту, і в процесі її роботи, шляхом подачі команд на виконавчий механізм, змінюють дози добрив, що вносяться на ділянку поля з будь-якими координатами в залежності від вмісту відповідної поживної речовини у ґрунті на цій ДІЛЯНЦІ, ЯКИЙ відрізняється тим, що формування команди для подачі на виконавчий механізм для встановлення необхідної дози добрив для внесення на ДІЛЯНЦІ з певними координатами починається тоді, коли висівна кромка машини знаходиться на відстані L до цієї ділянки, яка вимірюється паралельно лінії руху машини і визначається із співвідношення L = Vp(To + Ті + Т2)±І, де Vp - робоча швидкість машини, То - час формування відповідної команди для подачі на виконавчий механізм, Ті - час, що витрачається на спрацювання дозатора, після надходження на виконавчий механізм відповідної команди, І2 - час, протягом якого частинка добрив, видана дозатором, переміщується до висівної кромки, І - проекція віддалі, яку долає частинка у вільному польоті, від точки перетину нею висівної кромки до місця її зустрічі з поверхнею ґрунту, на ЛІНІЮ руху Винахід відноситься до сільськогосподарського машинобудування та виробництва і може бути використаний при розробці машин дня внесення машини, причому знак плюс (+) застосовується, коли проекція відрізка І відкладається від висівної кромки проти напрямку руху машини, а знак мінус (-) - в напрямку и руху 2 Машина для внесення мінеральних добрив в системі точного землеробства, яка включає бункер 3 дозатором, обладнаним виконавчим механізмом, розсіваючий орган з висівною кромкою, джерело інформації про покоординатний вміст поживних речовин у грунті, виконане у вигляді оптичного приладу, та комп'ютер, функціонально з'єднаний з джерелом інформації про покоординатний вміст поживних речовин у грунтів та виконавчим механізмом, який відрізняється тим, що джерело інформації про вміст поживних речовин у грунті встановлено попереду висівної кромки і закріплено з можливістю переміщення і фіксації для зміни віддалі L від нього до висівної кромки, виміряної паралельно напрямку руху машини З Машина за п 2, яка відрізняється тим, що відстань І від джерела інформації про вміст поживних речовин у грунті до висівної кромки, вимірюваної паралельно напрямку руху машини, визначається із співвідношення L = Vp(To + Ті + Т2)±І, де Vp - робоча швидкість машини, То - час формування відповідної команди для подачі на виконавчий механізм, Ті - час, що витрачається на спрацювання дозатора, після надходження на виконавчий механізм відповідної команди, І2 - час, протягом якого частинка добрив, видана дозатором, переміщується до висівної кромки, І - проекція віддалі, яку долає частинка у вільному польоті, від точки перетину нею висівної кромки до місця її зустрічі з поверхнею ґрунту, на ЛІНІЮ руху машини, причому знак плюс (+) застосовується, коли проекція відрізка І відкладається від висівної кромки проти напрямку руху машини, а знак мінус (-) - в напрямку и руху мінеральних добрив та при розробці технологій удобрення ґрунту в системі точного землеробства Відомий спосіб внесення мінеральних добрив ^ о ю 54049 при якому добрива вносять машиною, що має дозатор і розсіваючий орган з висівною кромкою і в процесі роботи добрива рівномірно подають дозатором на розсіваючий орган, з якого злітають через висівну кромку і однаковими дозами (в кг/га) розподіляються по усіх ділянках поля (ав св № 1319844, МПК5 А 01С 17/00) Недоліком цього способу є те, що добрива вносяться однаковими дозами на усіх ділянках поля не залежно від вмісту на них раніше накопичених поживних речовин (азоту, фосфору і калію) Однак, рослини споживають не тільки ті поживні речовини, які вносяться при удобренні ґрунту, а й ті, що раніше накопичились у ґрунті Тому при внесенні добрив однаковими дозами на усіх ділянках поля сумарна КІЛЬКІСТЬ накопичених раніше і внесених у ґрунт поживних речовин на різних ділянках поля також буде різною Це обумовлює зниження урожайності сільськогосподарських культур і ефективності застосування мінеральних добрив Відомий також спосіб внесення мінеральних добрив в системі точного землеробства, при якому проводять покоординатний аналіз вмісту поживних речовин у ґрунті і добрива вносять машиною, яка містить дозатор, обладнаний виконавчим механізмом та розсіваючий орган з висівною кромкою, з якої злітають добрива в ґрунт, і в процесі й роботи шляхом подачі команд на виконавчий механізм змінюють дози добрив, що вносяться на ділянку поля з будь-якими координатами, в залежності від вмісту відповідної поживної речовини у ґрунті на цій ДІЛЯНЦІ (заявка ФРГ № 19835487, М Кп А 01С 17) Цей спосіб є найбільш близьким до того, що заявляється і тому прийнятий за прототип Недоліком цього способу є те, що ВИСІЯНІ диференційовані дози добрив вносяться не на ті ділянки поля, для яких вони призначені Справа в тому, що між моментом початку формування відповідної команди для подачі на виконавчий механізм щодо зміни дози добрив для внесення на визначеній (конкретній) ДІЛЯНЦІ поля І моментом випадання сформованої при цьому дози на ґрунт проходить певний проміжок часу За цей проміжок часу машина, яка знаходиться в русі, проходить певну відстань і тому сформована доза добрив випадає на іншу ділянку поля, яка розміщена за визначеною ділянкою відносно напрямку руху машини Задачею винаходу є розробка способу внесення мінеральних добрив в системі точного землеробства, при якості сформовані виконавчим механізмом дози добрив для певних ділянок поля, в залежності від вмісту поживних речовин в ґрунті на цих ділянках, вносились на ті ділянки поля, для яких вони сформовані Поставлена задача вирішується завдяки тому, що у способі внесення мінеральних добрив в системі точного землеробства, при якому проводять покоординатний аналіз вмісту поживних речовин у ґрунті і добрива вносять машиною, яка містить дозатор, обладнаний виконавчим механізмом, та розсіваючий орган з висівною кромкою, з якої злітають (зсипаються) добрива на поверхню ґрунту, і в процесі її роботи, шляхом подачі команд на виконавчий механізм, злітають дози добрив, що вно сяться на ділянки з будь-якими координатами, в залежності від вмісту ВІДПОВІДНИХ ПОЖИВНИХ речовин у ґрунті на цій ДІЛЯНЦІ, ВІДПОВІДНО ДО винаходу, команда на виконавчий механізм, для встановлення необхідної дози добрив для внесення на ДІЛЯНЦІ з певними координатами, подається коли висівна кромка машини знаходиться на відстані L до цієї ділянки, яка вимірюється паралельно напрямку руху машини і визначається із співвідношення L = Vp (Jo+Ti+T2)±l, де Vp - робоча швидкість машини, То - час на формування відповідної команди для подачі на виконавчий механізм, Ті - час, що витрачається на спрацювання дозатора, після надходження на виконавчий механізм відповідної команди, І2 - час, протягом якого частинка добрив, видана дозатором, перемішується до висівної кромки, І - проекція відстані, яку долає частинка у вільному польоті, від точки перетину нею висівної кромки до місця її зустрічі з поверхнею ґрунту, на ЛІНІЮ руху машини, причому знак плюс (+) береться коли проекція відрізка і відкладається від висівної кромки проти напрямку руху машини і знак мінус (-) - в напрямку и руху Завдяки цьому, за проміжок часу, протягом якого після подачі відповідної команди на виконавчий механізм дозатора, доза добрив для внесення на ДІЛЯНЦІ з певними координатами, сформована в залежності від вмісту відповідної поживної речовини у ґрунті на ній, дійде до висівної кроки, дана кромка дійде до цієї ділянки поля Тому сформовані дози добрив вносяться на ті ділянки, для яких вони формувались В результаті цього сумарний вміст накопичених у ґрунті і внесених при його удобренні поживних речовин буде однаковим по усьому полю, що обумовлює підвищення урожайності сільськогосподарських культур та покращання ефективності застосування добрив Відома удобрювальна машина, яка включає бункер з дозатором, розсіваючий орган з висівною кромкою (кн Механизация внесения удобрений/ А Н Семенов, С М Закутский - М "Колос" - 1 9 7 2 - С 91-101) При роботі цієї машини добрива виносяться із бункера тарілчастим дозатором, розсіваючим органом (скидачем) спрямовуються на відбивний щит і сходячи з його висівної кромки розсіваються по поверхні поля Однак ця машина забезпечує внесення лише постійних, установлених дозатором, доз добрив, незалежно від раніше накопичених у ґрунті аналогічних поживних речовин Але оскільки вміст раніше накопичених основних поживних речовин - азоту, фосфору і калію у ґрунті варіює в значних межах, то після рівномірного внесення добрив постійною дозою по всьому полю, сумарний вміст раніше накопичених і внесених поживних речовин на окремих ділянках поля також буде відрізнятися в значних межах, що обумовлює зниження урожайності і ефективностізастосування добрив Відома також машина для внесення мінеральних добрив в системі точного землеробства, яка включає бункер з дозатором, обладнаним виконавчим механізмом, розсіваючий орган з висівною кромкою, джерело інформації про покоординатний вміст поживних речовин у ґрунті та комп'ютер, функціонально з'єднаний з джерелом інформації про 54049 покоординатний вміст поживних речовин у ґрунті і виконавчим механізмом (патентна заявка ФРГ № 19835487, МПК5 А 01С 17/00) При роботі цієї машини інформація від її джерела про покоординатний вміст поживних речовин у ґрунті на будь-якій ДІЛЯНЦІ ПОЛЯ перманентно поступає на комп'ютер, який видає команди про формування доз добрив для кожної з цих ділянок у ВІДПОВІДНІСТЮ з вмістом поживних речовин у фунті на них Виконавчий механізм формує ці дози добрив, які дозатором видаються на розсіваючий орган, злітаючи з висівної кромки якого вони падають на поверхню ґрунту Недоліком цієї машини є те, що сформовані дози добрив вносяться не на ті ділянки поля для яких вони формувались Причина цього недоліку полягає в тому, що між моментом початку формування відповідної команди для подачі на виконавчий механізм для встановлення дози добрив на певну ділянку поля і моментом випадання цієї дози на поверхню ґрунту проходить певний проміжок часу, за який машина проходить певну відстань Тому сформована доза добрив випадає на іншу ділянку поля, яка знаходиться за тією ділянкою, для котрої вона сформована Задачею винаходу є машина для внесення мінеральних добрив в системі точного землеробства, в якій шляхом зміни системи закріплення джерела інформації про покоординатний вміст поживних речовин у ґрунті забезпечується узгодження роботи цього джерела і дозатора на будьякій швидкості машини і тому сформовані дозатором дози добрив вносяться на ті ділянки поля, для яких вони формувались Поставлена задача вирішується завдяки тому, що в машині для внесення мінеральних добрив в системі точного землеробства, яка включає бункер з дозатором, обладнаним виконавчим механізмом, розсіваючий орган з висівною кромкою, джерело інформації про покоординатний вміст поживних речовин у фунтів та комп'ютер, функціонально з'єднаний з джерелом інформації про покоординатний вміст поживних речовин у ґрунті, ВІДПОВІДНО до винаходу, джерело інформації про вміст поживних речовин у ґрунті встановлено попереду висівної кромки / закріплено з можливістю переміщення і фіксації для зміни віддалі L від нього до висівної кромки, виміряної паралельно напрямку руху машини, яка визначається із співвідношення L = Vp (То+Ті+Ї2)±І, де Vp - робоча швидкість машини, То - час на формування відповідної команди для подачі на виконавчий механізм, Ті - час, що витрачається на спрацювання дозатора, після надходження на виконавчий механізм відповідної команди, Тг - час, протягом якого частинка добрив, видана дозатором, переміщується до висівної кромки, І - проекція віддалі, яку долає частинка у вільному польоті, від точки перетину нею висівної кромки до місця її зустрічі з поверхнею ґрунту, на ЛІНІЮ руху машини, причому знак плюс (+) береться коли проекція відрізка І відкладається від висівної кромки проти напрямку руху машини, а знак мінус (-) - в напрямку и руху Завдяки такому виконанню машини для внесення добрив забезпечується узгодження роботи джерела інформації про покоординатний вміст поживних речовин у ґрунті та дозатора і тому сформовані дозатором дози добрив вносяться саме на ті ділянки поля, для яких вони сформовані В результаті цього сумарний вміст накопичених у ґрунті і внесених машиною поживних речовин забезпечується однаковим по всьому полю і рівним заданій величині, що обумовлює підвищення урожайності сільськогосподарських культур без збільшення КІЛЬКОСТІ внесених добрив та ВІДПОВІДНОГО покращання ефективності їх застосування Приклад реалізації способу внесення мінеральних добрив в системі точного землеробства При реалізації способу внесення мінеральних добрив в системі точного землеробства проводять покоординатний аналіз вмісту поживних речовин (азоту, фосфору і калію) у ґрунті за допомогою існуючих засобів і записують на носій цієї інформації, наприклад дискету, або за допомогою оптичного приладу для по координатного аналізу вмісту поживних речовин у ґрунті, який установлюється на агрегаті (тракторі чи машині), а добрива вносять машиною, яка містить дозатор, обладнаний виконавчим механізмом, та розсіваючий орган з висівною кромкою, з якої добрива злітають (зсипаються) на поверхню ґрунту В процесі роботи машини, в залежності від вмісту ВІДПОВІДНИХ речовин у ґрунті на певних ділянках поля, одержаного при проведенні покоординатного аналізу, на виконавчий механізм дозатора подають необхідні команди і ВІДПОВІДНО збільшують або зменшують дози внесення добрив на цих ділянках Наприклад, якщо на якійсь ДІЛЯНЦІ ПОЛЯ ВМІСТ фо сфору у ґрунті менший від його середнього значення для цього поля, то доза внесення суперфосфату машиною ВІДПОВІДНО збільшується, а якщо цей вміст більший середнього значення, то ВІДПОВІДНО зменшується При чому команди на виконавчий механізм для встановлення необхідної дози добрив для внесення на ДІЛЯНЦІ ПОЛЯ З певними координатами подаються не тоді, коли висівна кромка висіваючого органа машини знаходиться над цією ділянкою, а коли ця висівна кромка знаходиться на віддалі L до цієї ділянки, яка вимірюється паралельно лінії руху машини і визначається із співвідношення L = Vp (Jo+Ti+T2)±l, де Vp - робоча швидкість машини, То - час на формування відповідної команди для подачі на виконавчий механізм, Ті - час, що витрачається на спрацювання дозатора, після надходження на виконавчий механізм відповідної команди, Тг - час, протягом якого частинка добрив, видана дозатором, переміщується до висівної кромки, І - проекція віддалі, яку долає частинка у вільному польоті, від точки перетину нею висівної кромки до місця її зустрічі з поверхнею ґрунту, на ЛІНІЮ руху машини, причому знак плюс (+) береться коли проекція відрізка І відкладається від висівної кромки проти напрямку руху машини, а знак мінус (-) - в напрямку її руху Величини Т0+Т1+Т2 і І є постійними для конкретної конструкції машини, визначаються в процесі випробування її дослідного зразка і наводяться в інструкції по експлуатації машини Vp є величиною змінною, яка вибирається в процесі експлуатації машини в залежності від потужності двигуна трактора, рельєфу поля і т п Забезпечити випереджену подачу команди на виконавчий механізм доза 54049 тора для зміни дози внесення добрив на певній ДІЛЯНЦІ поля, в момент коли висівна кромка машини знаходиться на віддалі L від цієї ділянки, забезпечується зміщенням (корекцією) на величину, що відповідає віддалі L на полі, координат поля на носи, на якому записаний покоординатной аналіз вмісту поживних речовин у ґрунті поля, або розміщенням приладу для покоординатного аналізу вмісту поживних речовин у ґрунті попереду висівної кромки машини на віддалі L Тому сформовані дози добрив вносяться на ті ділянки, для яких вони формувались і сумарний вміст накопичених у ґрунті і внесених при його удобренні поживних речовин стає однаковим по усьому полю, що відповідає вимогам системи точного землеробства Приклади виконання машини для внесення мінеральних добрив в системі точного землеробства пояснюються кресленнями, де фіг 1 - машина для внесення добрив в системі точного землеробства з транспортерним дозатором - вид збоку, фіг 2 - машина для внесення добрив в системі точного землеробства з тарілчастим дозатором - вид збоку Машина для внесення добрив в системі точного землеробства, включає бункер 1 з дозатором, виконаним у вигляді транспортера 2 (фіг 1) з регулювальною заслінкою 3, при виконанні машини для удобрення з допустимою нерівномірністю (нерівномірність не перевищує ± 20%), чи у вигляді тарілки 4 (фіг 2), при виконанні машини з підвищеною рівномірністю (нерівномірність перевищує ± 10%) удобрення Заслінка 3 обладнана виконавчим механізмом 5 для зміни дози внесення добрив Під задньою частиною транспортера 2 встановлений розсіювачий орган Виконаний у вигляді відцентрового диска 6 з лопатками 7 і висівною кромкою 8 Над тарілкою 4 (фіг 2) встановлено розсіваючий орган, виконаний у вигляді скидача 9 з пристроєм для надання йому обертального руху, котрий частково закритий відбивним щитом 10 з висівною кромкою 8 На рамі 11 машини, або на тракторі 12, з яким вона агрегатується, закріплено джерело інформації про покоординатний вміст поживних речовин у ґрунті, виконаний у вигляді оптичного приладу 13, котрий розміщений попереду висівної кромки 8, причому прилад 13 встановлений з можливістю його переміщення та фіксації для зміни віддалі від нього до висівної кромки 8, яка вимірюється паралельно напрямку руху маши ФІГ. 1 8 ни і може змінюватись шляхом регулювання довжини телескопічної штанги 14 (фіг 1), або повороту важеля 15 (фіг 2) Відстань від приладу 13 до висівної кромки 8 визначається співвідношенням L = Vp (То+Ті+Ї2)±І, де Vp - робоча швидкість машини, То - час формування відповідної команди для подачі на виконавчий механізм, Ті - час, що витрачається на спрацювання дозатора, після надходження на виконавчий механізм відповідної команди, Тг - час, протягом якого частинка добрив, видана дозатором, переміщується до висівної кромки, І - проекція віддалі, яку долає частинка у вільному польоті, від точки перетину нею висівної кромки до місця її зустрічі з поверхнею ґрунту, на ЛІНІЮ руху машини, причому знак плюс (+) береться коли проекція відрізка і відкладається від висівної кромки проти напрямку руху машини (фіг 1) і знак мінус (-) - в напрямку и руху (фіг 2) На тракторі 12 встановлено комп'ютер 16, котрий проводами 17 функціонально з'єднаний з приладом 13 і виконавчим механізмом 5 Перед початком роботи на комп'ютері 16 встановлюється необхідний рівень удобрення поля, наприклад, азотом і в бункер 1 ВІДПОВІДНО завантажуються азотні добрива При роботі машини прилад 13 перманентно подає в комп'ютер 16 інформацію про по координатний вміст азоту у ґрунті Комп'ютер 16 на основі заданого рівня удобрення ґрунту азотом і даних, які поступають від приладу 13 про вміст накопиченого азоту у ґрунті, формує ВІДПОВІДНІ команди, які по проводах 17 поступають на виконавчий механізм 5, котрий необхідним чином прикриває чи відкриває заслінку 3 При цьому ВІДПОВІДНО збільшується або зменшується доза добрив, яка дозатором 2 або 4 виноситься із бункера 1 Сформовані дози добрив переміщуються від дозатора до висівної кромки 8, а в цей час машина рухається по полю Завдяки встановленню оптимальної віддалі від приладу 13 до кромки 8, за той час, коли формується доза і поступає вона від дозатора 2 або 4 до висівної кромки 8, машина проходить по полю шлях рівний віддалі від приладу 13 до кромки 8 Тому дози добрив, які сходять з висівної кромки 8, подають саме на такі ділянки поля, для яких вони сформовані комп'ютером 16 В результаті цього сумарний вміст накопиченого в ґрунті і внесеного машиною азоту буде однаковим по всьому полю, що відповідає вимогам системи точного землеробства 10 54049 12 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of applying mineral fertilizers in а precise agriculture system and a machine for carrying out thereof
Автори англійськоюAdamchuk Valerii Vasyliovych, Moiseienko Volodymyr Kostiantynovych
Назва патенту російськоюСпособ внесения минеральных удобрений в системе точного земледелия и машина для его осуществления
Автори російськоюАдамчук Валерий Васильевич, Моисеенко Владимир Константинович
МПК / Мітки
МПК: A01C 21/00, A01C 17/00
Мітки: системі, мінеральних, точного, машина, внесення, здійснення, спосіб, добрив, землеробства
Код посилання
<a href="https://ua.patents.su/5-54049-sposib-vnesennya-mineralnikh-dobriv-v-sistemi-tochnogo-zemlerobstva-i-mashina-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб внесення мінеральних добрив в системі точного землеробства і машина для його здійснення</a>
Машина для підготовки мінеральних добрив до внесення
Номер патенту: 44539
Опубліковано: 15.02.2002
Автори: Вожик Юлій Григорович, Адамчук Валерій Васильович
МПК: B65B 69/00, B07B 1/30
Мітки: підготовки, мінеральних, добрив, машина, внесення
Формула / Реферат:
Машина для підготовки мінеральних добрив до внесення, що включає бункер, подрібнювальний апарат, просіювальний і відвантажувальний пристрої, який відрізняється тим, що просіювальний пристрій розташований безпосередньо під бункером, а подрібнювальний апарат розташований під вихідним кінцем просіювального пристрою.
Машина для внесення мінеральних добрив
Номер патенту: 16112
Опубліковано: 29.08.1997
Автори: Коцюба Микола Микитович, Шестаков Володимир Егорович, Готліб Євген Олександрович, Гординський Олександр Анатолійович
МПК: A01C 15/00, A01C 17/00
Мітки: мінеральних, машина, добрив, внесення
Формула / Реферат:
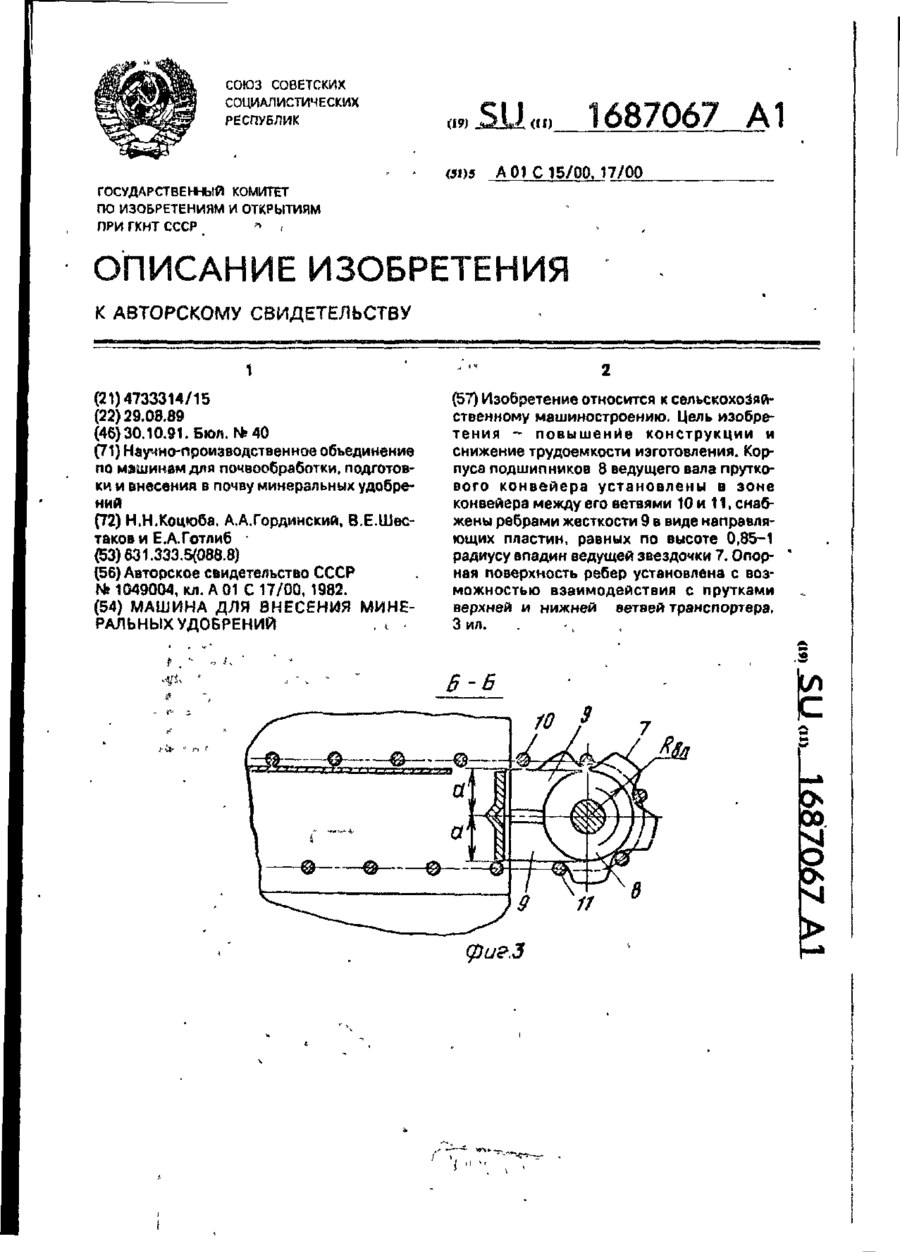
Машина для внесення минеральных удобрений, содержащая бункер, конвейєр с приводом от звездочек ведущего вала, установленного в подшипниках, отличающаяся тем, что, с целью упрощения конструкции и снижения трудоемкости изготовления, корпуса подшипников установлены в зоне конвейера между его ветвями, выполнены с ребрами в виде направляющих пластин, равных по высоте 0,85-1 радиусу впадин звездочек, причем опорная поверхность ребер размещена с...
Спосіб внесення у грунт органічних добрив та пристрій для його здійснення
Номер патенту: 47595
Опубліковано: 15.07.2002
Автор: Дьяков Володимир Данилович
МПК: A01B 25/00
Мітки: внесення, добрив, спосіб, грунт, органічних, здійснення, пристрій
Формула / Реферат:
1. Спосіб внесення в ґрунт органічних добрив, що включає розкидання органічних добрив пo площі поля та внесення їх у ґрунт, який відрізняється тим, що добрива вносять у верхній шар ґрунту одночасно з його перемішуванням /обробкою/.2. Пристрій для здійснення способу, що містить ґрунтообробні органи, завантажувальну ємкість, механізм розкидання, який відрізняється тим, що він оснащений розкидально-змішувальним пристроєм у вигляді...
Пристрій для локального внесення мінеральних добрив
Номер патенту: 31743
Опубліковано: 15.12.2000
Автори: Сало Василь Михайлович, Сисолін Петро Васильович
МПК: A01B 49/06
Мітки: добрив, пристрій, локального, внесення, мінеральних
Текст:
...окремо взятої, лапи. , Задача, що вирішується винаходом полягає в підвищенні рів номірності розподілу мінеральних добрив по ширині захвату як всього удобрювача так і по ширині захвату кожного робочого органа. Поставлена задача вирішується тим , що для дозування , транспортування і розподілу добрив по ширині захвату удобрювача пропонується пристрій » який складається з дозатора,вентилятора , тукопневмопровода з соплом , стрільчатої лапи з...
Розсіюючий орган машини для внесення мінеральних добрив
Номер патенту: 5730
Опубліковано: 29.12.1994
Автори: Грігоров Сєргєй Ніколаєвіч, Гуслін Владімір Пєтровіч, Шмєльов Анатолій Івановіч, Гординський Олександр Анатолійович, Онищенко Володимир Борисович, Флєглєр Юрій Євгенієвіч, Адамчук Валерій Васильович
МПК: A01C 15/04
Мітки: машини, внесення, орган, розсіюючий, добрив, мінеральних
Формула / Реферат:
(57) 1. Рассеивающий орган машины для внесения минеральных удобрений, включающий диск с лопатками и приводом вращения, вентилятор с лопастями, отличающийся тем, что кожух вентилятора установлен под вращающимся диском соосно ему, лопасти вентилятора закреплены на нижней поверхности вращающегося диска, причем заборное отверстие кожуха вентилятора расположено на нижней крышке, а выпускное окно на его обечайке.2. Рассеивающий орган по п.1,...
Попередній патент: Спосіб лікування пневмонії
Наступний патент: Установка для неперервного зброджування сусла з вуглеводвмісної сировини
Випадковий патент: Спосіб посилення гормональної активності щитовидної залози у щурів при післяопераційному гіпотиреозі