Цифровий спосіб виміру радіальних швидкостей цілей
Номер патенту: 55289
Опубліковано: 17.03.2003
Автори: Головін Олексій Олександрович, Слюсар Вадим Іванович
Формула / Реферат
1. Цифровий спосіб виміру радіальних швидкостей цілей, що полягає в періодичному випроміненні імпульсних сигналів, здійсненні над прийнятими луна-сигналами операції аналого-цифрового перетворення (АЦП), формуванні вимірювальної вибірки шляхом багаторазового відбору однойменних відліків цифрових напруг сигналів, отриманих у різні періоди випромінення, здійсненні для виміру швидкості цілі зваженого підсумовування в межах сформованої зазначеним чином вимірювальної вибірки однойменних відліків сигналів, отриманих у різні періоди випромінення, який відрізняється тим, що визначення швидкості цілі проводять шляхом виміру періодичного зсуву у часі сигналів з відомою огинаючою в сформованій вимірювальній вибірці, який виникає на протязі N зондувань внаслідок руху цілі.
2. Спосіб за п. 1, який відрізняється тим, що визначення швидкості цілі здійснюють за виразом:
![]() ,
,
де Т - період повторення зондувальних імпульсів, с - швидкість світла, d - періодичний зсув у часі сигналів в сформованій вимірювальній вибірці внаслідок руху цілі, оцінений в періодах дискретизації АЦП, ![]() - період дискретизації АЦП.
- період дискретизації АЦП.
3. Спосіб за пп. 1, 2, який відрізняється тим, що операції аналого-цифрового перетворення луна-сигналів передує їх амплітудне детектування.
4. Спосіб за пп. 1, 2, який відрізняється тим, що після операції аналого-цифрового перетворення луна-сигналів здійснюють їх цифрове детектування, наприклад, шляхом відкидання знакового розряду.
5. Спосіб за пп. 3, 4, який відрізняється тим, що зважене підсумовування однойменних відліків сигналів, отриманих у різні періоди випромінення, здійснюють за виразом:
 ,
,
де N - кількість імпульсів у вибірці, S - протяжність вимірювальної вибірки у відліках АЦП, s - номер відліку АЦП, n - номер імпульсу, Usn -напруга sn-го відліку АЦП, d - величина періодичного зсуву у часі сигналів в сформованій вимірювальній вибірці на протязі N зондувань внаслідок руху цілі,
![]()
- нормована до свого максимуму дискретна функція огинаючої n-го імпульсу в s-м за номером відліку вимірювальної вибірки,
М - тривалість імпульсів у періодах дискретизації АЦП,
z - зсув першого з задіяних для виміру відліків АЦП відносно останнього імпульсу в пачці,
причому оцінку величини періодичного зсуву імпульсів d здійснюють шляхом перебору можливих значень z та d з заданим кроком до досягнення функцією F максимуму максиморум.
6. Спосіб за пп. 1, 2, який відрізняється тим, що операції аналого-цифрового перетворення луна-сигналів передує формування квадратурних складових сигналів шляхом аналогового перемноження прийнятого сигналу та опорного.
7. Спосіб за пп. 1, 2, який відрізняється тим, що після аналого-цифрового перетворення луна-сигналів формують їх квадратурні складові у цифровому вигляді.
8. Спосіб за п. 7, який відрізняється тим, що формування квадратурних складових сигналів здійснюють за допомогою дискретного перетворення Гільберта у режимі ковзаючого вікна над заданою кількістю відліків, яка залежить від порядку фільтра Гільберта.
9. Спосіб за пп. 6 - 8, який відрізняється тим, що зважене підсумовування однойменних відліків сигналів, отриманих у різні періоди випромінення, здійснюють за виразом:
 +
+ = max,
= max,
де N - кількість імпульсів у вибірці, S - протяжність вимірювальної вибірки у відліках АЦП, s - номер відліку АЦП, n - номер імпульсу, ![]() ,
, ![]() - квадратурні складові напруги sn-го відліку АЦП, d - величина періодичного зсуву у часі сигналів в сформованій вимірювальній вибірці на протязі N зондувань внаслідок руху цілі,
- квадратурні складові напруги sn-го відліку АЦП, d - величина періодичного зсуву у часі сигналів в сформованій вимірювальній вибірці на протязі N зондувань внаслідок руху цілі,

- нормовані до свого максимуму дискретні функції огинаючої n-го імпульсу в косинусній та синусній квадратурах в s-м за номером відлікові вимірювальної вибірки,
М - тривалість імпульсів у періодах дискретизації АЦП,
z - зсув першого з задіяних для виміру відліків АЦП відносно останнього імпульсу в пачці, причому оцінку величини періодичного зсуву радіоімпульсів d здійснюють шляхом перебору можливих значень z та d з заданим кроком до досягнення функцією FM максимуму максиморум.
Текст
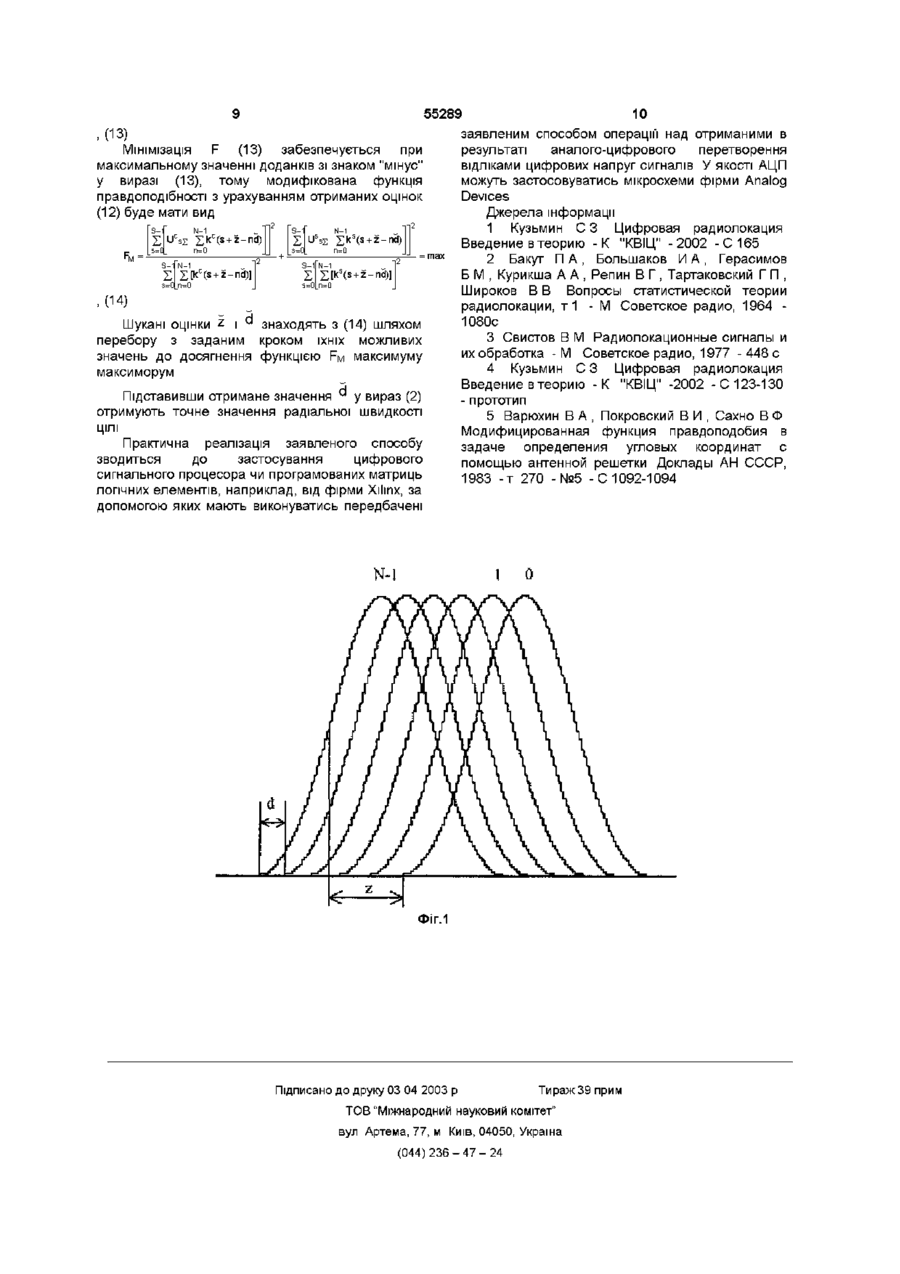
1 Цифровий спосіб виміру радіальних швидкостей цілей, що полягає в періодичному випромшенні імпульсних сигналів, здійсненні над прийнятими луна-сигналами операції аналогоцифрового перетворення (АЦП), формуванні вимірювальної вибірки шляхом багаторазового відбору однойменних ВІДЛІКІВ цифрових напруг сигналів, отриманих у різні періоди випромшення, здійсненні для виміру швидкості ЦІЛІ зваженого підсумовування в межах сформованої зазначеним чином вимірювальної вибірки однойменних ВІДЛІКІВ сигналів, отриманих у різні періоди випромшення, який відрізняється тим, що визначення швидкості ЦІЛІ проводять шляхом виміру періодичного зсуву у часі сигналів з відомою огинаючою в сформованій вимірювальній вибірці, який виникає на протязі N зондувань внаслідок руху ЦІЛІ 2 Спосіб за п 1, який відрізняється тим, що визначення швидкості ЦІЛІ ЗДІЙСНЮЮТЬ за виразом d • At • с V= 2T де Т - період повторення зондувальних імпульсів, с - швидкість світла, d - періодичний зсув у часі сигналів в сформованій вимірювальній вибірці внаслідок руху ЦІЛІ, оцінений в періодах дискретизації АЦП, At - період дискретизації АЦП 3 Спосіб за пп 1, 2, який відрізняється тим, що операції аналого-цифрового перетворення лунасигналів передує їх амплітудне детектування 4 Спосіб за пп 1, 2, який відрізняється тим, що після операції аналого-цифрового перетворення луна-сигналів здійснюють їх цифрове детектування, наприклад, шляхом відкидання знакового розряду 5 Спосіб за пп 3, 4, який відрізняється тим, що зважене підсумовування однойменних ВІДЛІКІВ сигналів, отриманих у різні періоди випромшення, здійснюють за виразом S-1 k(s + z - nd 2 s=0 S-1 N-1 [k^ + z - n d 2 s=0 де N - КІЛЬКІСТЬ імпульсів у вибірці, S - протяжність вимірювальної вибірки у відліках АЦП, s - номер відліку АЦП, п - номер імпульсу, U sn -напруга sn-ro відліку АЦП, d - величина періодичного зсуву у часі сигналів в сформованій вимірювальній вибірці на протязі N зондувань внаслідок руху ЦІЛІ, N1 n=0 n=0 k ( s + z - n d) = fk(s + z - n d)при n d < s + z s + z > M + n d - нормована до свого максимуму дискретна функція огинаючої n-го імпульсу в s-м за номером відліку вимірювальної вибірки, М - тривалість імпульсів у періодах дискретизації АЦП, z - зсув першого з задіяних для виміру ВІДЛІКІВ АЦП відносно останнього імпульсу в пачці, причому оцінку величини періодичного зсуву імпульсів d здійснюють шляхом перебору можливих значень z та d з заданим кроком до досягнення функцією F максимуму максиморум 6 Спосіб за пп 1, 2, який відрізняється тим, що операції аналого-цифрового перетворення лунасигналів передує формування квадратурних складових сигналів шляхом аналогового перемноження прийнятого сигналу та опорного 7 Спосіб за пп 1, 2, який відрізняється тим, що після аналого-цифрового перетворення лунасигналів формують їх квадратурні складові у цифровому вигляді 8 Спосіб за п 7, який відрізняється тим, що формування квадратурних складових сигналів здійснюють за допомогою дискретного перетворення Гільберта у режимі ковзаючого вікна над заданою КІЛЬКІСТЮ ВІДЛІКІВ, яка залежить від порядку фільтра Гільберта 9 Спосіб за пп 6 - 8, який відрізняється тим, що зважене підсумовування однойменних ВІДЛІКІВ сигналів, отриманих у різні періоди випромшення, здійснюють за виразом 00 ю ю S-1 N-1 2 n=0 s=0 S-1 N-1r c k ls + z-nd 2 n=0 s=0 S-1 N-1 s k (s+z-nd 2 n=0 s=0 = max, S-1 N-1r s k ls+z-nd 2 n=0 s=0 де N - КІЛЬКІСТЬ імпульсів у вибірці, S - протяжність вимірювальної вибірки у відліках АЦП, s - номер відліку АЦП, п - номер імпульсу, Us n , и| п квадратурні складові напруги sn-ro відліку АЦП, d величина періодичного зсуву у часі сигналів в Винахід відноситься до галузі радіолокації і може бути застосований для виміру швидкості цілей при некогерентних зондуючих сигналах та при тривалому накопиченні когерентних відбитих імпульсів Відома значна КІЛЬКІСТЬ способів виміру радіальних швидкостей цілей, що спираються на оцінку доплеровського зсуву частоти луна-сигналів в багатоканальному вимірювачі Зокрема, сутність способу [1] полягає в застосуванні М частотних каналів з узгодженими фільтрами, частотне рознесення між якими вибирають, виходячи із заданої розрізнювальної здатності зондувального сигналу за доплеровською частотою Попередню оцінку частоти Доплера отримують за номером каналу (фільтра) з максимальною амплітудою вихідної напруги Для підвищення точності оцінювання використовують напруги декількох частотних каналів, фіксуючи максимум огинаючої відгуків обраних частотних фільтрів Недоліком даного способу є необхідність встановлення чималої КІЛЬКОСТІ фільтрів і детекторів огинаючої, що збільшує габарити апаратури а також обмеженість точності виміру ВІДОМІ способи виміру радіальної швидкості за допомогою відслідковуючого вимірювача дальності, зокрема [2] Сутність даного способу полягає у вимірі дальності, що змінюється у часі, шляхом зняття сигналу неузгодженості з дискримінатора та подальшого його диференціювання Недоліком даного способу є низька точність виміру при значних прискореннях цілей та зривах їх автоматичного супроводження Відомий спосіб виміру швидкості цілей "недоплеровським методом" [3] Сутність способу полягає у випромінюванні двох коротких імпульсів у різні моменти часу і визначенні дальності до ЦІЛІ у двох послідовних зондуваннях (Di та D2) З урахуванням відомого часу між посилками імпульсів Т, радіальну швидкість ЦІЛІ визначають за формулою 55289 4 сформованій вимірювальній вибірці на протязі N зондувань внаслідок руху ЦІЛІ, kc'3^(s + z-n d)npn n d M + n d - нормовані до свого максимуму дискретні функції огинаючої п-го імпульсу в косинусній та синусній квадратурах в s-м за номером ВІДЛІКОВІ вимірювальної вибірки, М - тривалість імпульсів у періодах дискретизації АЦП, z - зсув першого з задіяних для виміру ВІДЛІКІВ АЦП відносно останнього імпульсу в пачці, причому оцінку величини періодичного зсуву радіоімпульсів d здійснюють шляхом перебору можливих значень z та d з заданим кроком до досягнення функцією FM максимуму максиморум Т (1) Проте, забезпечення високої точності виміру швидкості даним способом пов'язане з необхідністю досягнення значного відношення сигнал-шум для кожного з зондувань Серед відомих способів виміру швидкості цілей найбільш близьким за своєю сутністю до винаходу, що заявляється, є цифровий спосіб виміру швидкості шляхом оцінки регулярного доплерівського зсуву частоти відбитих сигналів [4] Сутність операцій способа-прототипа полягає в періодичному випро-мшенні імпульсних сигналів, здійсненні над прийнятими луна-сигналами операції аналого-цифрового перетворення, формуванні вимірювальної вибірки шляхом багаторазового відбору однойменних ВІДЛІКІВ цифрових напруг сигналів, отриманих у різні періоди випромінення, здійсненні для виміру швидкості ЦІЛІ зваженого підсумовування в межах сформованої зазначеним чином вимірювальної вибірки однойменних ВІДІЛКІВ сигналів, отриманих у різні періоди випромінення, причому зважене підсумовування виконується за допомогою дискретного перетворення Фур'є (ДПФ) з подальшим вибором частотних каналів, в яких амплітуда сигналу перевищила поріг виявлення, та оцінкою по ним доплеровського зсуву частоти за методом максимальної правдоподібності Зазначений спосіб-прототип дозволяє істотно підвищити точність виміру швидкості Однак, спосіб-прототип потребує високої когерентності сигналів і втрачає свою точність при великих швидкостях цілей за умов тривалого накопичення сигналів цілей З урахуванням сказаного, технічне завдання, що вирішується заявленим винаходом, полягає в підвищенні точності виміру швидкості цілей шляхом застосування цифрового методу виміру періодичного зсуву у часі сигналів, який виникає внаслідок руху ЦІЛІ на протязі багатьох зондувань Сутність заявленого винаходу полягає в 55289 періодичному випромшенні імпульсних сигналів, здійсненні над прийнятими лунасигналами операції аналого-цифрового перетворення, формуванні вимірювальної вибірки шляхом багаторазового відбору однойменних ВІДЛІКІВ цифрових напруг сигналів, отриманих у різні періоди випромінення, здійсненні для виміру швидкості ЦІЛІ зваженого підсумовування в межах сформованої зазначеним чином вимірювальної вибірки однойменних ВІДІЛКІВ сигналів, отриманих у різні періоди випромінення, причому, на відміну від прототипу, заявлений спосіб відрізняється тим, що визначення швидкості ЦІЛІ проводять шляхом виміру періодичного зсуву у часі сигналів з відомою огинаючою в сформованій вимірювальній вибірці, який виникає на протязі N зондувань внаслідок руху ЦІЛІ Визначення швидкості ЦІЛІ ЗДІЙСНЮЮТЬ за виразом v = d A t c 2 Т , (2) де Т - період повторення зондувальних імпульсів, с - швидкість світла, d - періодичний зсув у часі сигналів в сформованій вимірювальній вибірці внаслідок руху ЦІЛІ, оцінений в періодах дискретизації АЦП, At - період дискретизації АЦП Подальші варіанти конкретної реалізації заявленого способу різняться залежно від особливостей первинної обробки сигналів, а саме застосування для виміру швидкості цілей лунасигналів у вигляді відео, чи радіоімпульсів Так, один з варіантів заявленого способу може відрізнятись тим, що операції аналого-цифрового перетворення луна-сигналів передує їх амплітудне детектування Інший варіант може передбачати виконання після операції аналого-цифрового перетворення лунасигналів їх цифрового детектування, наприклад, шляхом відкидання знакового розряду В обох цих випадках, має місце застосування для виміру швидкості цілей лунасигналів у вигляді відеоімпульсів Тому подальший варіант операцій над ними відрізняється тим, що зважене підсумовування однойменних ВІДЛІКІВ сигналів, отриманих у різні періоди випромінення, здійснюють за виразом k(s + z-nd) s=0 S-1 N-1 [k(s + z - nd 2 n=0 s=0 ,(3) де N - КІЛЬКІСТЬ імпульсів у вибірці, S протяжність вимірювальної вибірки у відліках АЦП, U s - номер відліку АЦП, п - номер імпульсу, s Z сумарна напруга імпульсів, присутніх у s-му відліку АЦП, d - періодичний зсув у часі сигналів в сформованій вимірювальній вибірці внаслідок руху ЦІЛІ, оцінений в періодах дискретизації АЦП, ( k(s + z - nd) при n d M+ nd ,(4) - нормована до свого максимуму дискретна функція огинаючої n-го імпульсу в s-м за номером ВІДЛІКОВІ вимірювальної вибірки, М - тривалість імпульсів у періодах дискретизації АЦП, z - зсув першого з задіяних для виміру ВІДЛІКІВ АЦП відносно останнього імпульсу в пачці, оцінку величини періодичного зсуву імпульсів d здійснюють шляхом перебору можливих значень z та d з заданим кроком до досягнення функцією F (3) максимума максиморум Слід звернути увагу, що в заявленому способі зважене підсумовування однойменних ВІДЛІКІВ сигналів, отриманих у різні періоди випромінювання, виконують за аналогією із синтезом нульового частотного фільтра в процедурі швидкого перетворення Фур'є, предбаченої сиособом-протоипом (фіг 1), де d періодичний зсув у часі сигналів в сформованій вимірювальній вибірці внаслідок руху ЦІЛІ, оцінений в періодах дискретизації АЦП, z -зсув першого з задіяних для виміру ВІДЛІКІВ АЦП відносно останнього імпульсу в пачці При цьому задаються ЛІНІЙНОЮ моделлю руху ЦІЛІ в межах інтервалу спостереження Швидкість ЦІЛІ вважають постійною Фактори, що впливають на рух ЦІЛІ, такі як її тип (балістична, аеродинамічна), можливості маневрування, точність керування, неоднорідність середовища, у якій відбувається політ, не враховують Припускають, що зазначені імпульси мають однакову, описувану аналітичною функцією, відому форму огинаючої, і на інтервалі прийому сигнальної пачки період їхнього повторення d залишається незмінним Також вважають, що приймальний тракт вносить зневажливо малі нелінійні перекручування У даній задачі в якості невідомих розглядають величини d та z Для синтезу процедури їх знаходження було застосовано метод найменших квадратів [5] Відповідна вихідна сума квадратів нев'язань усіх рівнянь системи мала вигляд s=0 mm n=0 де а - амплітуда сигналів Функція нев'язок (5) на відміну від можливої альтернативи 2 S-1 N-1/ л w F = 2 2 r s n - a k ( s + z - n d ) \ -> m m s=0 n=0 тим дозволяє ПОЛІПШИТИ відношення сигнал-шум і самим підвищити точність оцінювання ШВИДКОСТІ Мінімум F забезпечується при цілком визначеній ОЦІНЦІ а , Яку знаходять шляхом диференціювання (5) по зазначеній невідомій і прирівнюванням до нуля її похідної а= S-2 s=C и _ N1 ^k(s + z-nd) n0 = S-1 N-1 2 s=0 n=0 (6) Для знаходження оцінок 2 і 3 можна перейти до модифікованої, згідно [5], функції правдоподібності Для цього доданки, що входять у (5) зводять у квадрат і розкривають дужки 55289 (UsE r-2all s E ,(7) Мінімізація F забезпечується при максимальному значенні доданку зі знаком "мінус" у виразі (7), тому модифікована функція правдоподібності з урахуванням отриманої оцінки (6) буде мати вигляд N-1 S-1 2 n=o s=0 s-1 N-1 2 s=0 n=0 = max ,(8) Як вже зазначалось, шукані оцінки ud і z знаходять з (8) шляхом перебору з заданим кроком їхніх можливих значень до досягнення функцією FM максимуму максиморум (2), Підставивши отримане значення " у вираз отримують точне значення радіальної швидкості ЦІЛІ У випадку застосування для виміру швидкості цілей луна-сигналів у вигляді радіоімпульсів варіант виконання заявленого способу може відрізнятись тим, що операції аналого-цифрового перетворення луна-сигналів передує формування квадратурних складових сигналів шляхом аналогового перемноження прийнятого сигналу та опірного У цьому випадку після формування квадратурних складових сигналів здійснюють їх аналого-цифрове перетворення, а подальші операції над прийнятими сигналами виконують у цифровій формі Інший варіант реалізації заявленого способу відрізняється тим, що після аналого-цифрового перетворення луна-сигналів формують їх квадратурні складові у цифровому вигляді При цьому формування квадратурних складових сигналів може здійснюватись за допомогою дискретного перетворення Гільберта у режімі ковзаючого вікна над заданою КІЛЬКІСТЮ ВІДЛІКІВ, яка залежить від порядку фільтра Гільберта В усіх випадках, коли має місце застосування для виміру швидкості цілей лунасигналів у вигляді радюмпульсів, подальший варіант операцій заявленого способа відрізняється тим, що зважене підсумовування однойменних ВІДЛІКІВ сигналів, отриманих у різні періоди випромшення, здійснюють за виразом 8 величина періодичного зсуву у часі сигналів в сформованій вимірювальній вибірці на протязі N зондувань внаслідок руху ЦІЛІ, . C(S)t ., k c ' s '(s+z-nd),npH nd
Додаткова інформація
Назва патенту англійськоюMethod for digitally measuring radial velocity of a target
Автори англійськоюHolovin Oleksii Oleksandrovych, Sliusar Vadym Ivanovych
Назва патенту російськоюСпособ цифрового измерения радиальной скорости цели
Автори російськоюГоловин Алексей Александрович, Слюсар Вадим Иванович
МПК / Мітки
МПК: G01S 13/58
Мітки: спосіб, швидкостей, цілей, виміру, радіальних, цифровий
Код посилання
<a href="https://ua.patents.su/5-55289-cifrovijj-sposib-vimiru-radialnikh-shvidkostejj-cilejj.html" target="_blank" rel="follow" title="База патентів України">Цифровий спосіб виміру радіальних швидкостей цілей</a>
Цифровий спосіб виміру частоти по n дискретних відліках пачки когерентних сигналів
Номер патенту: 51214
Опубліковано: 15.11.2002
Автори: Кравченко Микола Іванович, Ленчук Дмитро Валерійович
МПК: G01R 23/16
Мітки: цифровий, пачки, відліках, спосіб, дискретних, виміру, сигналів, когерентних, частоти
Формула / Реферат:
Цифровий спосіб виміру частоти по N дискретних відліках пачки когерентних сигналів, що полягає у вимірі амплітуд сигналів за допомогою дискретного перетворення Фур’є ( ДПФ) у кількох частотних каналах і виборі основного частотного каналу, у якому амплітуда сигналу максимальна і частоту якого приймають як...
Спосіб визначення малих радіальних швидкостей в когерентних рлс і пристрій для його здійснення
Номер патенту: 54301
Опубліковано: 17.02.2003
Автори: Рогожкін Євген Васильович, Лізогуб Віталій Васильович, Пуляєв Валерій Олександрович
МПК: G01S 13/95
Мітки: спосіб, визначення, рлс, когерентних, радіальних, здійснення, малих, пристрій, швидкостей
Формула / Реферат:
1. Спосіб визначення малих радіальних швидкостей в імпульсних когерентних РЛС зі спільною приймально-передавальною антеною, що включає випромінювання строго в одній фазі радіохвилі, прийом відбитого від об'єкта сигналу з переносом його на проміжну частоту, вимірювання фазового зсуву відбитого сигналу відносно зондуючого і обчислення радіальної швидкості по приросту фазового зсуву за інтервал часу, що дорівнює періоду повторення зондуючих...
Спосіб виміру кута місця цілі

Номер патенту: 32191
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Пророшин Сергій Михайлович, Кудрик Андрій Миколайович
МПК: G01S 17/00
Мітки: спосіб, виміру, місця, цілі, кута
Текст:
...або шляхом електричного сканування діаграми спрямування антени в робочому кутомісцевому секторі радіолокатора. Спосіб-прототип полягає у виконанні таких операцій: періодичне хитання антени (або діаграми спрямування антени) у вертикальній площині розташування цілі в заданому кутомісцевому секторі; випромшення періодичних зондуючих радіоімпульсів на несучій частоті мікрохвильового діапазону; періодичне переключення антени з передачі...
Пристрій для розподілу газу та утримання каталізатора в каталітичних шарах радіальних або аксіально-радіальних реакторів
Номер патенту: 8084
Опубліковано: 26.12.1995
Автори: Джорджіо Пагані, Умберто Зарді
МПК: B01J 8/00, C01C 1/04, B01J 8/02, B01J 8/04
Мітки: шарах, каталітичних, радіальних, каталізатора, пристрій, утримання, розподілу, реакторів, газу, аксіально-радіальних
Формула / Реферат:
(57) 1. Устройство для распределения газа и удержания катализатора в каталитических слоях радиальных или аксиально-радиальных реакторов, включающее опорный элемент и сетку, отличающееся тем, что опора выполнена в виде выпуклых участков, непроницаемых для газа, выполняющих роль механической опоры для сетки, и проницаемых для газа перфорированных участков, обеспечивающих необходимое падение давления, которые расположены между выпуклыми...
Спосіб заглушування завад для доплеровської рлс з селекцією рухомих цілей, які викликані відбиттям електромагнітних хвиль від об’ємних розподілених цілей
Номер патенту: 17872
Опубліковано: 03.06.1997
Автори: Рогов Петро Дмитрович, Касаткін Леонід Веніамінович, Дубровський Сергій Єгорович, Феньов Дмитро Васильович
МПК: G01S 13/50, G01S 7/36
Мітки: цілей, хвиль, селекцією, електромагнітних, рлс, рухомих, завад, відбиттям, заглушування, доплеровської, об'ємних, викликані, спосіб, розподілених
Формула / Реферат:
Способ подавления помех для доплеровских РЛС с селекцией движущихся целей, вызванных отражениями электромагнитных волн от распределенных объемных целей - дождя, снега, града и т.п., заключающийся в выделении и усилении отраженных сигналов с доплеровскими поправками частоты, фильтрации сигналов доплеровских частот системой узкополосных фильтров (гребенкой фильтров) для определения скорости цели, индикации движущейся цели, отличающийся тем, что...
Попередній патент: Спосіб керування частотою генератора гармонічних коливань та пристрій для його здійснення
Наступний патент: Спосіб визначення об’єму регідратації та корекції гіпокаліємії при гострих кишкових інфекційних захворюваннях
Випадковий патент: Транспортний засіб з багатопаливним газотурбінним двигуном