Спосіб заглушування завад для доплеровської рлс з селекцією рухомих цілей, які викликані відбиттям електромагнітних хвиль від об’ємних розподілених цілей
Номер патенту: 17872
Опубліковано: 03.06.1997
Автори: Рогов Петро Дмитрович, Дубровський Сергій Єгорович, Касаткін Леонід Веніамінович, Феньов Дмитро Васильович
Формула / Реферат
Способ подавления помех для доплеровских РЛС с селекцией движущихся целей, вызванных отражениями электромагнитных волн от распределенных объемных целей - дождя, снега, града и т.п., заключающийся в выделении и усилении отраженных сигналов с доплеровскими поправками частоты, фильтрации сигналов доплеровских частот системой узкополосных фильтров (гребенкой фильтров) для определения скорости цели, индикации движущейся цели, отличающийся тем, что отраженный сигнал после фильтрации гребенкой фильтров детектируется, фильтруются полосовыми фильтрами, полосы пропускания которых соответствуют полосам частот амплитудной модуляций отраженного сигнала, характеризующих конкретные движущиеся цели, отфильтрованный сигнал усиливается и индицируется.
Текст
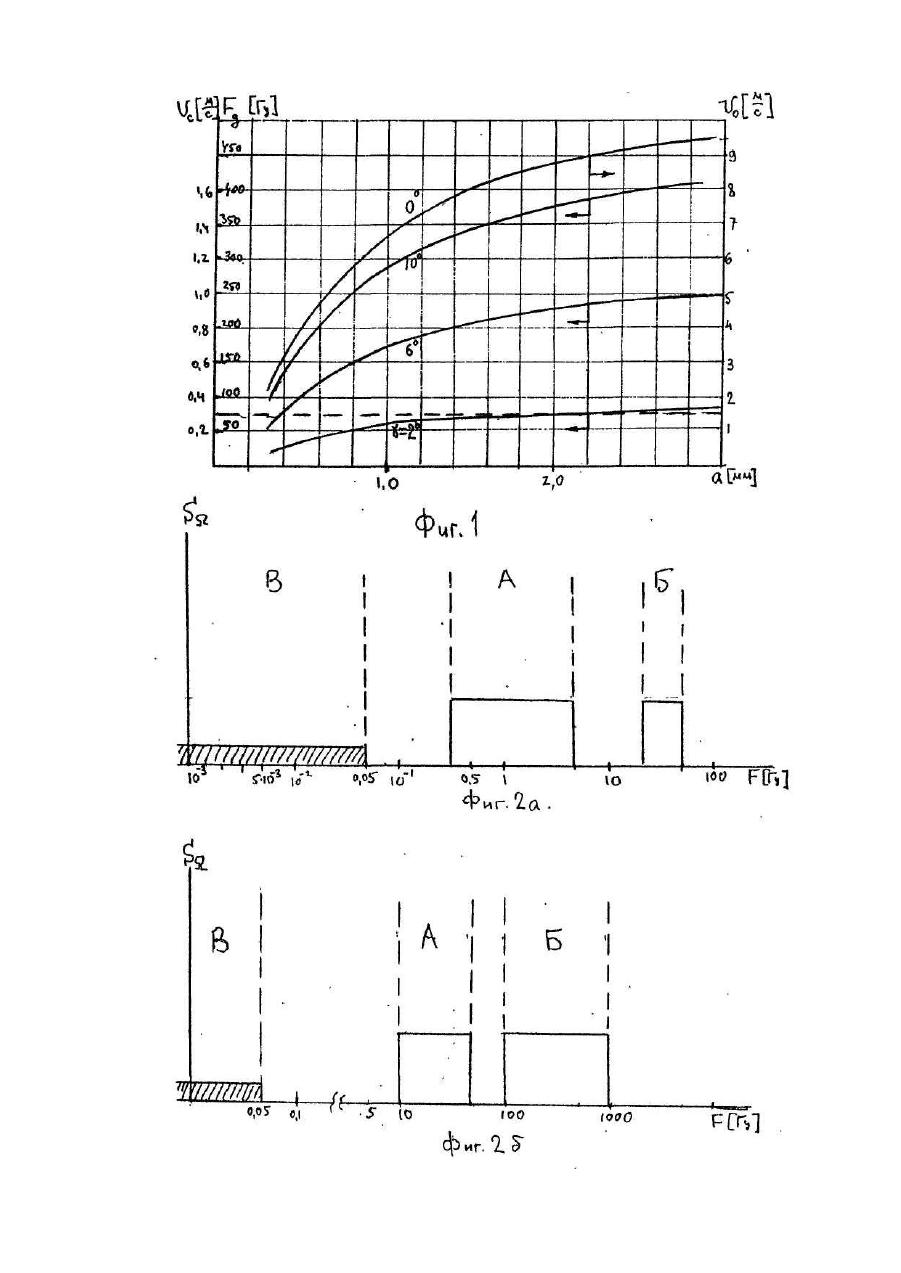
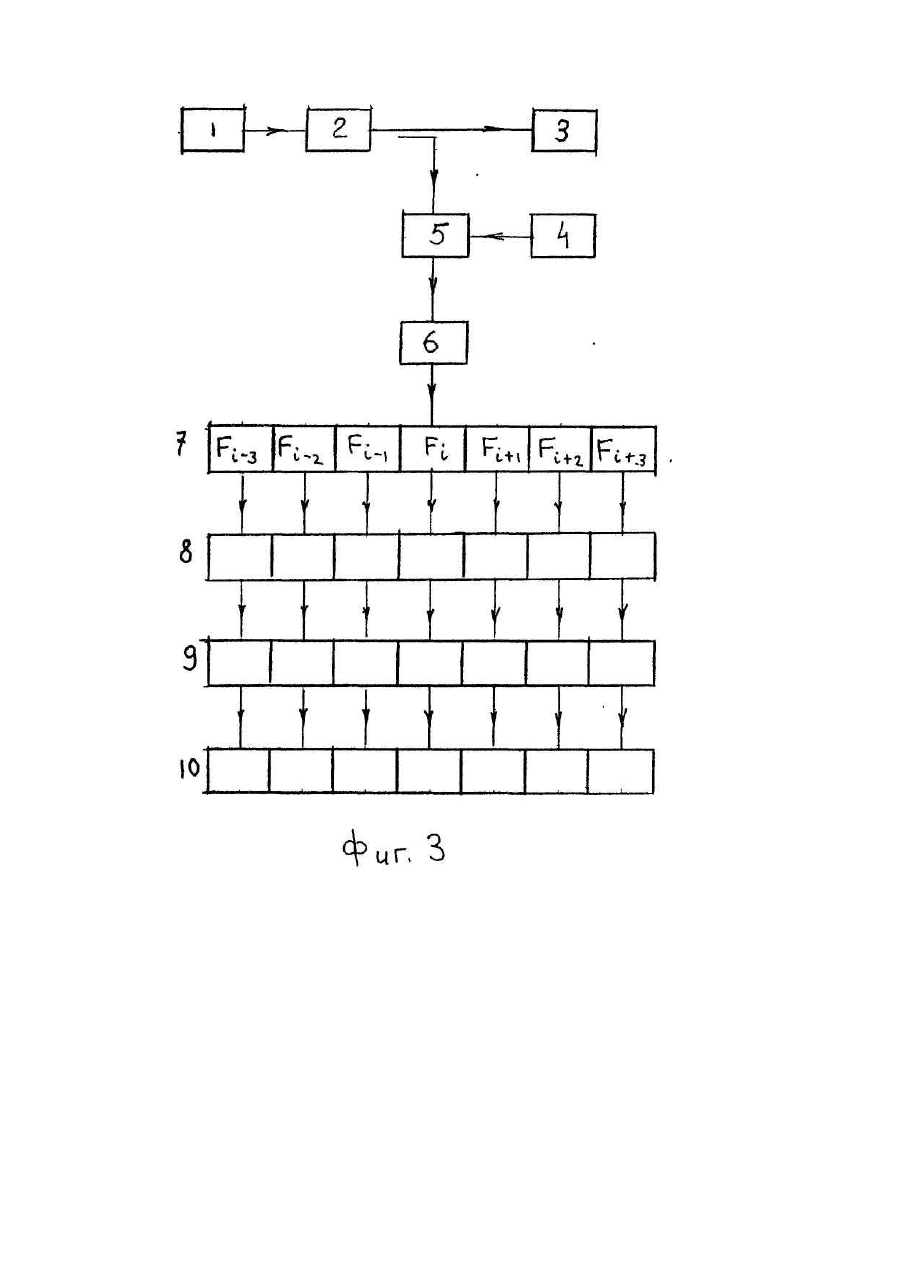
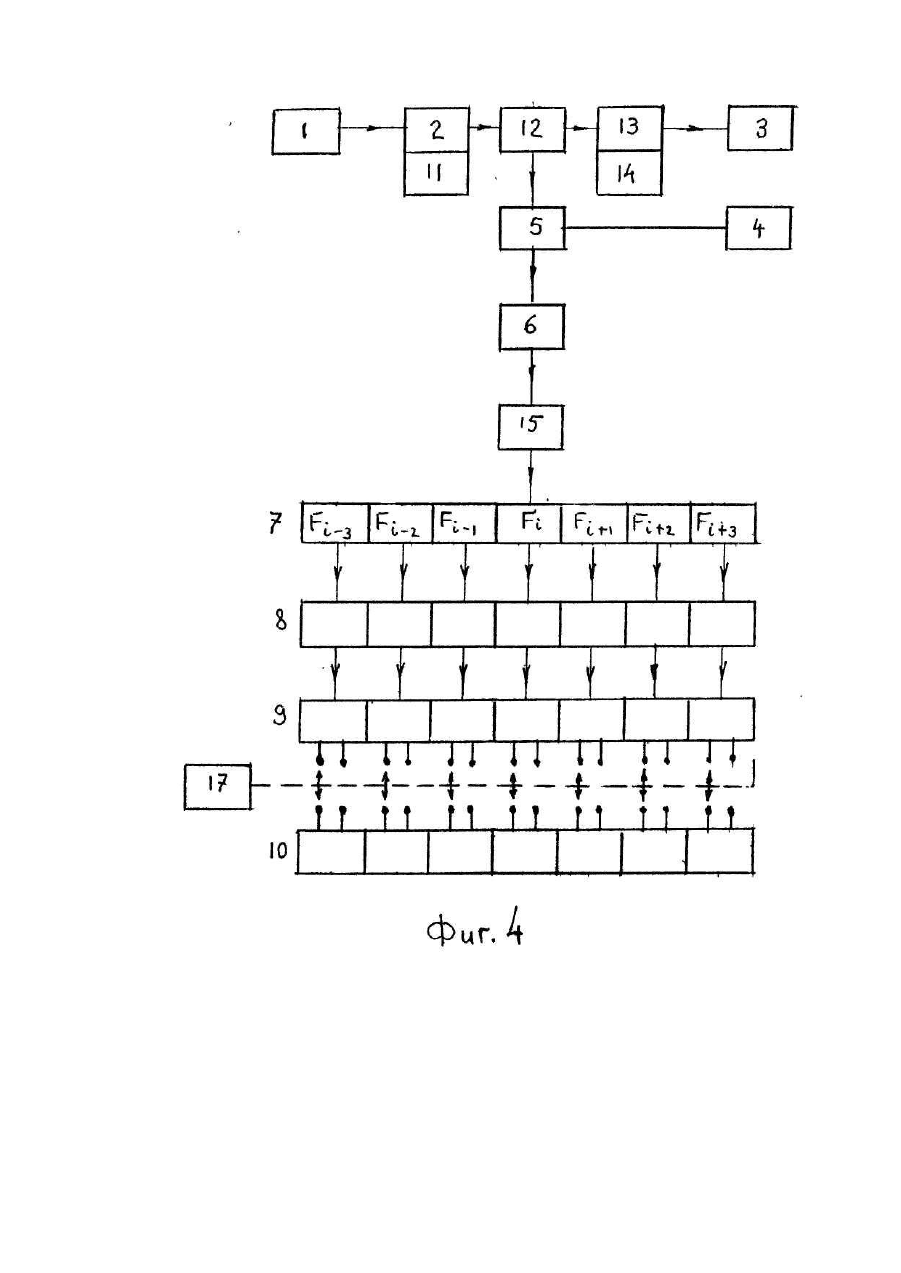
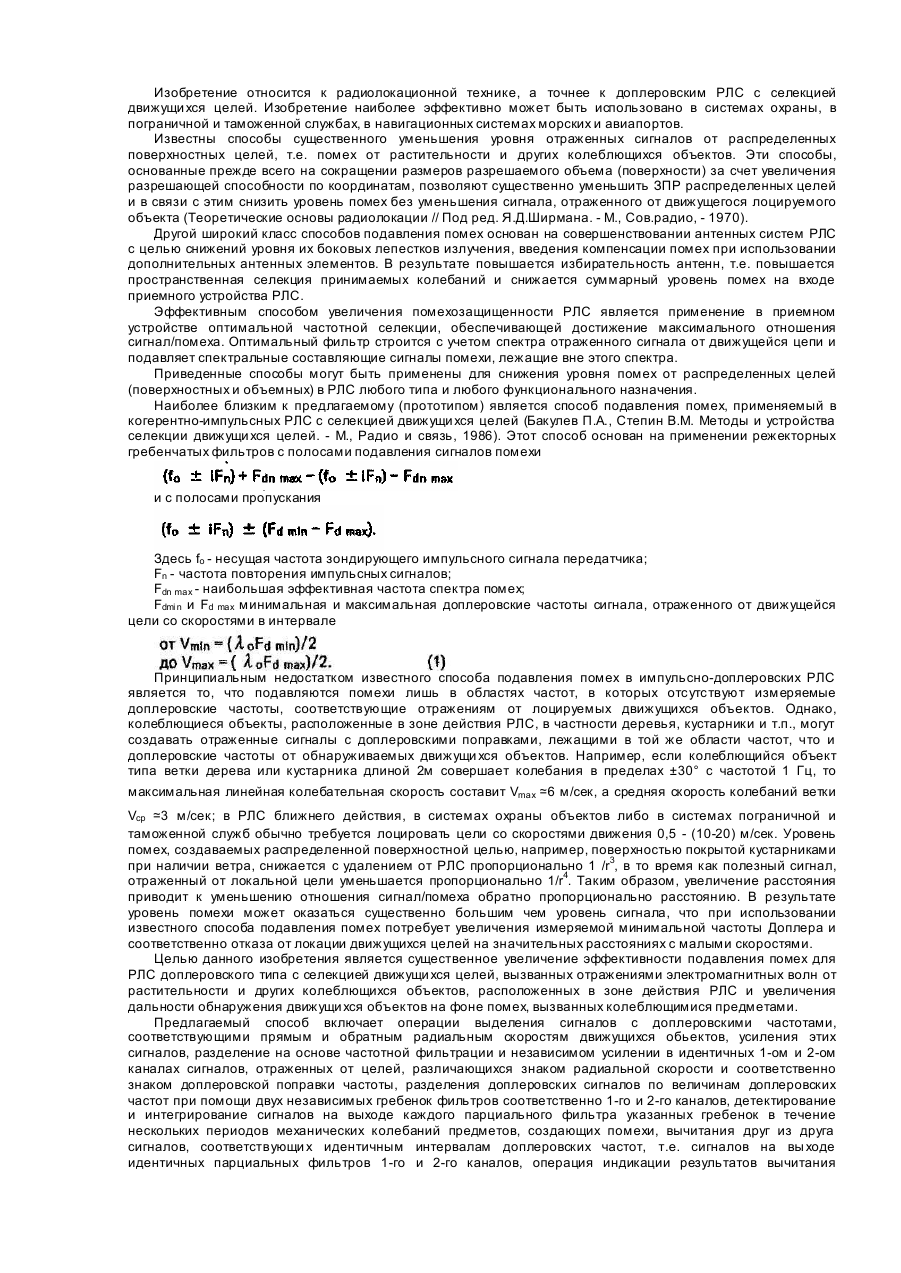
Изобретение относится к радиолокационной технике, а точнее к доплеровской РЛС с селекцией движущи хся целей. Изобретение наиболее эффективно может быть использовано в системах охраны объектов, в пограничной и таможенной службах, в навигационных системах морских и авиапортов. Известны эффективные способы существенного уменьшения уровня отраженных сигналов от распределенных объемных целей, т.е. помех от дождя, снега, града и т.п. Эти известные способы сводятся к следующему: а) уменьшение ЭПР распределенной цели за счет сокращения размеров разрешаемого объема, что достигается увеличением разрешающей способности РЛС по координатам, т.е. по дальности и угловым координатам. Такое решение позволяет существенно уменьшить ЭПР распределенной объемной цели и в связи с этим соответственно снизить уровень помех от дождя, снега и т.п. без уменьшения сигнала, отраженного от движущегося лоцируемого объекта (Теоретические основы радиолокации//Под ред.Я.Д.Ширмана. - М.: Сов.радио, - 1970). Задача уменьшения ЭПР объемной цели принципиально важна для РЛС любого функционального назначения, поскольку в реальных случаях величины ЭПР осадков могут значительно превышать эффективную поверхность рассеяния лоцируемой цели Sэц . Действительно, для реальных радиолокационных систем с коэффициентом направленности антенны G = 104, длительностью импульса t = 1 мкс и дальностью действия Rmax = 1 км ЭПР дождя при его интенсивности I = 10 мм/(час составит 74 м 2, что существенно превышает ЭПР такой цели как человек, для которой в диапазоне l= 8мм Sэц = 0,8 м 2. В связи с этим увеличение разрешающих способностей РЛС всегда принципиально важно и широко применяется (с учетом ограничений, приведенных ниже). б) Применение в приемном устройства РЛС оптимальной частотной селекции, обеспечивающей достижение максимального отношения сигнал/помеха. Оптимальный фильтр строится с учетом спектра отраженного сигнала от движущейся цели и подавляет спектральные составляющие сигнала помехи, лежащие вне этого спектра (/1/). в) Применение круговой поляризации излучаемого сигнала, что позволяет в широком диапазоне рабочих частот снизить уровень сигнала, отраженного от дождя, т.е. уменьшить ЭПР дождя, в основном на 20 дБ (Потапов А.А. Радиофизические эффекты при взаимодействии электромагнитного излучения миллиметрового диапазона волн с окружающей средой. Ч. 2// Зарубежная радиоэлектроника. - 1992., №9 - С. 17, рис.18). В то же время указанные известные способы подавления уровня отраженного сигнала от объемной распределенной цели не решают в полной мере проблему построения помехозащищенных РЛС. Действительно, увеличение разрешающей способности РЛС по угловым координатам требует увеличения размеров антенны, что недопустимо во многих практически важных системах применения РЛС. Увеличение направленности антенн РЛС приводит к увеличению времени обзора пространства, что также недопустимо в различных практически важных применениях. Увеличение разрешающей способности РЛС по дальности, требует уменьшения длительности импульса излучаемого сигнала и в результате этого, при сохранении периода повторения импульсного зондирующего сигнала, что необходимо для обеспечения однозначности определения дальности цели в известных РЛС, снижает энергопотенциал и соответственно уменьшается дальность действия. Применение оптимальной частотной фильтрации является эффективным способом подавления помех. Однако при построении радиолокационных систем, предназначенных для локации движущи хся целей со сравнительно малыми скоростями V = (0,1-10) м/сек, что характерно, например, для таких целей как человек, животные и т.п., либо для целей, движущи хся практически перпендикулярно к направлению излучения, методы частотной фильтрации практически не работают. Это связано с тем, что при возникновении составляющих скорости капель дождя по направлению излучения РЛС доплеровские поправки рассеянного дождем сигнала оказываются в измеряемой полосе доплеровских частот, соотве тствующей движению лоцируемой цели. В качестве подтверждения сказанному, на фиг.1 представлена зависимость скорости падения капель дождя Vo[м/c], у поверхности земли в зависимости от радиуса а[мм] капель, определенные согласно (Довчак Р., Зринг Д. Доплеровские радиолокаторы и метеорологические наблюдения. - Ленинград: Гидрометеоиздат - 1988. - С. 512) для нормального атмосферного давления и температуры 20°С. На этой же фигуре приведены составляющие скоростей капель дождя Vr(a) по направлению излучения РЛС при различных значениях угла g, определяющего отклонение излучения от нормали к вектору скорости Vo. Здесь приведены также соответствующие зависимости доплеровских поправок Fd(a). Как видно из приведенных зависимостей, даже при больших угла х g доплеровские смещения частоты рассеянного дождем сигнала лежат в полосе измеряемых доплеровских частот медленно движущихся целей. Угол g может изменяться в широких пределах как в связи с направленностью антенны РЛС, так и при влиянии ветра на траектории дождевых капель. Таким образом, частотная фильтрация не решает проблемы подавления сигнала рассеянного дождем доплеровских РЛС селекции движущи хся целей. Применение круговой поляризации для подавления отражений от дождя эффективно применяется в РЛС локации самолетов, различных транспортных средств, характеризующихся наличием отражающих узлов сложной геометрии с плоскими гранями. В этом случае вычитание сигналов с вертикальной и горизонтальной поляризацией при приеме слабо сказывается на уровне полезного сигнала, но примерно на 20 дБ снижает уровень сигнала, отраженного дождем. Однако, в те х случаях, когда радиолокационный целью является человек, применение метода круговой поляризации, практически подавляет полезный сигнал. В соответствии с работой (Потапов А.А. Радиофизические эффекты при взаимодействии электромагнитного излучения миллиметрового диапазона волн с окружающей средой// Зарубежная радиоэлектроника, 1993, - №7,8,9. C.48) средние значения ЭПР человека в широком диапазоне рабочих частот f >(3-10) ГГц одинаковы для горизонтальной и вертикальной составляющих, что при вычитания соответствующих этим поляризациям сигналов при приеме приведет в подавлению полезного сигнала. Таким образом, как следует из приведенного рассмотрения известных способов подавления сигналов, отраженных от объемных распределенных целей, указанные способы характеризуются существенными ограничениями и не позволяют в полной мере, применительно к доплеровским РЛС различного назначения, решить задачу существенного подавления отражений от дождя и т.п. Тем не менее, для широкого класса различных целей, широкого диапазона параметров движения известные методы подавления помех от объемных распределенных целей дают положительный эффект и находят широкое применение. Наиболее близкими к предлагаемому (прототипом) является способ подавления помех, применяемых в когерентноимпульсных РЛС с селекцией движущихся целей ([5] Бакулев Л.А., Степин В.М. Методы и устройства селекции движущи хся целей//. - М.: Радио и связь. - 1986). Этот метод основан на выделении и усилении отраженных сигналов с доплеровскими поправками частоты, фильтрации сигналов доплеровских частот системой узкополосных фильтров (гребенкой фильтров) для определения скорости цели и индикации движущейся цели. В общем случае, в соответствии с задачами, стоящими при разработке РЛС, указанный способ-прототип дополняется методами применения круговой поляризации излучаемого сигнала и методами существенного уменьшения разрешаемого объема. Недостаток указанного метода - прототипа проявляется при локации сравнительно медленно движущи хся целей по отношению к РЛС (с радиальными скоростями Vr < 10 м/сек) в связи с тем, что доплеровские частоты отраженных сигналов от цели и от дождя, снега и т.п. оказываются лежащими практически в одном и том же диапазоне и поэтому не различаются методами оптимальной фильтрации. Целью данного изобретения является существенное увеличение эффективности подавления помех от объемных распределенных целей (дождя, снега, града и т.п.) для РЛС доплеровского типа с селекцией движущи хся объектов. Предлагаемый способ включает операции выделения и усиления отраженных сигналов с доплеровскими поправками частоты, фильтрации сигналов доплеровских частот системой узкополосных фильтров (гребенкой фильтров) для определения скорости цели, детектирования сигналов после каждого узкополосного парциального фильтра, гребенки фильтров, фильтрации продетектированных сигналов полосовыми фильтрами, полосы пропускания которых соответствуют полосам частот амплитудой модуляции отраженного сигнала, характеризующи х конкретные движущиеся цели, усилении отфильтрованных сигналов, после чего сигнал индицируется. Новыми существенными признаками изобретения являются вновь введенные операции: - детектирование сигналов после каждого узкополосного парциального фильтра, гребенки фильтров; - фильтрации продетектированных сигналов полосовыми фильтрами, полосы пропускания которых соответствуют полосам частот амплитудной модуляции отраженного сигнала, характеризующи х конкретные движущиеся цели; - усиление отфильтрованных сигналов; - индикации сигналов после фильтрации. Введение новых существенных признаков позволяет существенно увеличить эффективность подавления помех от объемных распределенных целей (дождя, снега, града и т.п.) для РЛС доплеровского типа с селекцией движущи хся целей. Сущность предлагаемого способа и принцип его функционирования поясняется следующим образом. Реальная движущаяся цель является сложным объектом, отдельные элементы которого совершают в процессе перемещения всего объекта, как целого, самостоятельные движения. Указанные самостоятельные движения элементов цели в полной мере характеризуют радиолокационный образ цепи. Так, при движении человека его туловище, голова совершают движение со скоростью перемещения всего объекта в то время как ноги, руки совершают движения по совершенно другим законам. При движении транспортных средств существенной особенностью является вращение колес, гусениц и т.п.; при полете вертолета важной характеристикой объекта является вращение его винтов и т.д. Движение элементов лоцируемых целей создает самостоятельные отраженные сигналы с доплеровскими частотами соответствующие этим самостоятельным движениям. В результате интерференции сигналов, отраженных элементами движущейся цели, возникает суммарный сигнал с амплитудной и частотной модуляцией, со смещением средней частоты, вызванных перемещением всей цели. Спектр отраженного сигнала определяется движением всех компонент лоцируемого объекта и поэтому полностью характеризует распознаваемый образ движущейся цели. Экспериментальные исследования, проведенные авторами данного изобретения, показывают, что наиболее существенными параметрами этого спектра являются: смещение средней частоты спектрального распределения отраженного сигнала, определяющее скорость движения объекта; компоненты спектра, определяемые амплитудной модуляцией отраженного сигнала, связанной с движением отдельных элементов объекта и явлением интерференции. Определение спектра частот амплитудной модуляции сигнала и доплеровского смещения средней частоты спектра дает полное представление об образе движущейся цели и скорости его движения. Могут быть введенные понятия форманты движения объекта по аналогии с формантами звука при портретировании речи (А.Фор. Восприятие и распознавание образов. - М.: Ма шиностроение. - 1989. - с.272), позволяющие однозначно характеризовать образ движущегося объекта. Так, продвижении человека форманты движения характеризуются спектром частот амплитудной модуляции отраженного сигнала распределенного в: основном в области частот доли единицы герц, за счет движения ног и периодической их остановки при выполнении шагов и в области десятков герц для РЛС 8мм диапазона волн за счет интерференции отраженных от движущи хся конечностей и тулови ща. При движении вертолета характерным является всплеск спектрального распределения частот амплитудной модуляции в области частот 5-20 герц. Таким образом, анализ спектра отраженного сигнала от движущегося объекта, в частности определения спектра частот амплитудной модуляции этого сигнала совместно с измерением доплеровского сдвига частоты суммарного спектра позволяет однозначно определить образ движущейся цели и скорость этого движения. Рассмотрим теперь частотный спектр отраженного сигнала от объемных распределенных целей. Указанные спектральные распределения характеризуются скоростью движения капель в дожде, смещением траекторий движения капель, временем изменения интенсивности дождя, а также интенсивности и направления ветра. Анализ показывает (см. фиг.1), что доплеровские частоты отраженного от дождя сигнала, лежат в области десятки-сотни герц, т.е. перекрывают область измеренных доплеровских частот лоцируемых целей, при их радиальной скорости Vr = 2Fдmax. Оцифрованный сигнал поступает на гребенчатый цифровой фильтр (7), производящий гармонический анализ сигнала доплеровских частот, лежащих в интервале Fдmin-Fдmax. К каждому і-му парциальному фильтру гребенчатого фильтра (7) подключается i-й цифровой детекторный канал многоканальной детектирующей системы (8); после детектирования сигнал каждого i-го детекторного канала поступает на цифровой гребенчатый фильтр (9), выделяющий частоту модулирующего по амплитуде сигнала соответствующего конкретной движущейся цели и дающей возможность провести распознавание образа радиолокационной движущейся цели. Интервал частот, соответствующих наиболее вероятным частотам амплитудной модуляции сигнала отраженного от объемной распределенной цели, гребенчатым фильтром (9) не пропускается. Таким образом, на выходе гребенчатого фильтра имеются сигналы отраженные от лоцируемых движущи хся целей, но не от дождя, снега и т.п. После гребенчатого фильтра (9) сигналы каждого i-го канала пропускаются на соответствующий i-й канал N канального индикатора (10), В варианте схемы фиг.4 предусмотрена возможность переключения фильтров опознавания гребенчатого фильтра (9) при помощи переключателя (17). Такое переключение обеспечивает возможность распознавания различных движущи хся объектов (человека, животных, птицы, транспортных средств и т.п.). Описанный предлагаемый способ подавления помех от объемных распределенных целей, основанный на парциальном различии формантов движения локализованных и распределенных объектов, может быть эффективным способом подавления помех от дождя в РЛС с селекцией движущи хся целей различных классов.
ДивитисяДодаткова інформація
Автори англійськоюDubrovskyi Serhii Yehorovych, Rohov Petro Dmytrovych, Feniov Dmytro Vasyliovych
Автори російськоюДубровский Сергей Егорович, Рогов Петр Дмитриевич, Фенев Дмитрий Васильевич
МПК / Мітки
МПК: G01S 7/36, G01S 13/50
Мітки: розподілених, селекцією, об'ємних, спосіб, хвиль, доплеровської, завад, цілей, заглушування, відбиттям, викликані, рлс, рухомих, електромагнітних
Код посилання
<a href="https://ua.patents.su/7-17872-sposib-zaglushuvannya-zavad-dlya-doplerovsko-rls-z-selekciehyu-rukhomikh-cilejj-yaki-viklikani-vidbittyam-elektromagnitnikh-khvil-vid-obehmnikh-rozpodilenikh-cilejj.html" target="_blank" rel="follow" title="База патентів України">Спосіб заглушування завад для доплеровської рлс з селекцією рухомих цілей, які викликані відбиттям електромагнітних хвиль від об’ємних розподілених цілей</a>
Спосіб заглушування завад для доплеровської рсл з селекцією рухомих цілей, які викликані відбиттям електромагнітних хвиль від рослинності та інших предметів, які коливаються
Номер патенту: 17870
Опубліковано: 03.06.1997
Автори: Феньов Дмитро Васильович, Дубровський Сергій Егорович, Рогов Петро Дмитрович, Касаткін Леонід Веніамінович
МПК: G01S 13/50, G01S 7/36
Мітки: предметів, цілей, коливаються, інших, електромагнітних, рухомих, завад, спосіб, викликані, рослинності, селекцією, заглушування, хвиль, доплеровської, відбиттям, рсл
Формула / Реферат:
Способ подавления помех для доплеровских РЛС с селекцией движущихся целей, вызванных отражениями электромагнитных волн от растительности и других колеблющихся предметов, расположенных в зоне действия РЛС, заключающийся в выделении и усилении отраженных сигналов с доплеровскими поправками частоты, содержащими информацию о величине и знаке радиальной скорости цепи, разделении на основе частотной фильтрации и независимом усилении сигналов,...
Бортовий секвентний радіолокатор для виявлення рухомих цілей на поверхні землі
Номер патенту: 17458
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: радіолокатор, бортовий, рухомих, землі, цілей, виявлення, поверхні, секвентний
Формула / Реферат:
Бортовой секвентный радиолокатор для обнаружения движущихся целей на поверхности земли, содержащий приемо-передающую антенну с антенным переключателем, передатчик зондирующих периодических видеоимпульсных сигналов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включены устройство сканирования антенны с датчиком азимута и угла места и гетеродин видеоимпульсных...
Спосіб зважування рухомих об`єктів
Номер патенту: 17600
Опубліковано: 06.05.1997
Автор: Дашевський Яків Тевелович
МПК: G01G 19/04, G01G 23/00
Мітки: зважування, об'єктів, рухомих, спосіб
Формула / Реферат:
Способ взвешивания движущихся объектов, включающий установку на железнодорожном пути грузоприемной платформы, опирающейся на тензодатчики, преобразование выходных сигналов тензодатчиков в цифровые коды, фильтрацию цифровых кодов, суммирование отдельных результатов измерений, отличающийся тем, что отдельные измерения выходных сигналов тензодатчиков за время перемещения груза по грузоприемной платформе запоминают в оперативном запоминающем...
Спосіб вимірювання азимуту повітряних цілей
Номер патенту: 13423
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: вимірювання, азимуту, повітряних, цілей, спосіб
Формула / Реферат:
Способ измерения азимута воздушных целей, заключающийся в излучении импульсных зондирующих сигналов с помощью зеркальной антенны с рефлектором типа параболический цилиндр с облучателем в виде вертикального вибратора с цилиндрическим контррефлектором и приеме эхо-сигналов цели, отличающийся тем, что излучают несинусоидальные импульсные сигналы в виде периодической последовательности видеоимпульсов поля радиоволн длительностью 0,1-1 не без...
Спосіб імітації відображень від розподілених об’єктів, що рухаються, і пристрій його реалізації
Номер патенту: 17501
Опубліковано: 06.05.1997
Автори: Кравченко Микола Іванович, Бакумов Володимир Миколайович
МПК: G01S 7/40
Мітки: спосіб, реалізації, рухаються, об'єктів, відображень, пристрій, імітації, розподілених
Формула / Реферат:
1. Способ имитации отражений от движущихся распределенных объектов, по которому последовательность отсчетов некоррелированного шума генерируют с периодом и задерживают на период следования отсчетов, умножают, отличающийся тем, что ее задерживают на периодов повторения зондирующего импульсного сигнала РЛС, отводят отсчеты после каждой задержки на умножают соответственно на коэффициент АР, разветвляют и умножают на и на соответственно,...
Наступний патент: Пристрій для перетворення механічних параметрів в електричний сигнал
Випадковий патент: Інтерактивний спосіб комп'ютеризованого навчання