Система керування швидкістю транспортного засобу лінійними двигунами
Номер патенту: 56276
Опубліковано: 15.05.2003
Автори: Бурсов Генадій Володимирович, Зайцев Григорій Фролович, Градобоєва Неля Вікторівна

Формула / Реферат
Система керування швидкістю транспортного засобу лінійними двигунами, який складається з програмного пристрою, що виробляє необхідне поточне значення швидкості прямування транспортного засобу, датчика швидкості прямування транспортного засобу, інтегратора, включеного між датчиком швидкості і програмним пристроєм, елемента порівняння швидкостей, на прямий вхід якого надходить сигнал із програмного пристрою, а на інвертуючий вхід - із датчика швидкості, підсилювача-перетворювача системи, вхід якого сполучений із виходом елемента порівняння швидкостей, а його вихідний сигнал надходить на n (по числу тягових лінійних двигунів) паралельно включених каналів керування двигунами, у кожний із яких входять послідовно сполучені компаратор, на другий вхід якого надходить сигнал із виходу загального генератора напруги пилкоподібної форми, комутатор, на другий вхід якого подається напруга живлення від загального некерованого випрямляча, а вихід сполучений із входом тягового двигуна, яка відрізняється тим, що сила тяги одного лінійного двигуна приймається за опорну і вводяться n-1 автономних асиметричних підсистем автоматичної підтримки рівності сили тяги кожного з інших n-1 двигунів з опорною силою тяги, причому кожна з асиметричних підсистем містить датчик сили тяги даного двигуна, елемент порівняння підсистеми, на прямий вхід якого подається сигнал із датчика опорної сили тяги, а на інвертуючий вхід - сигнал із датчика сили тяги даного двигуна, підсилювач-перетворювач підсистеми, вхід якого сполучений із виходом елемента порівняння підсистеми, а вихідний сигнал надходить на другий вхід суматора, включеного між підсилювачем-перетворювачем системи і компаратором на вході каналу керування даним двигуном.
Текст
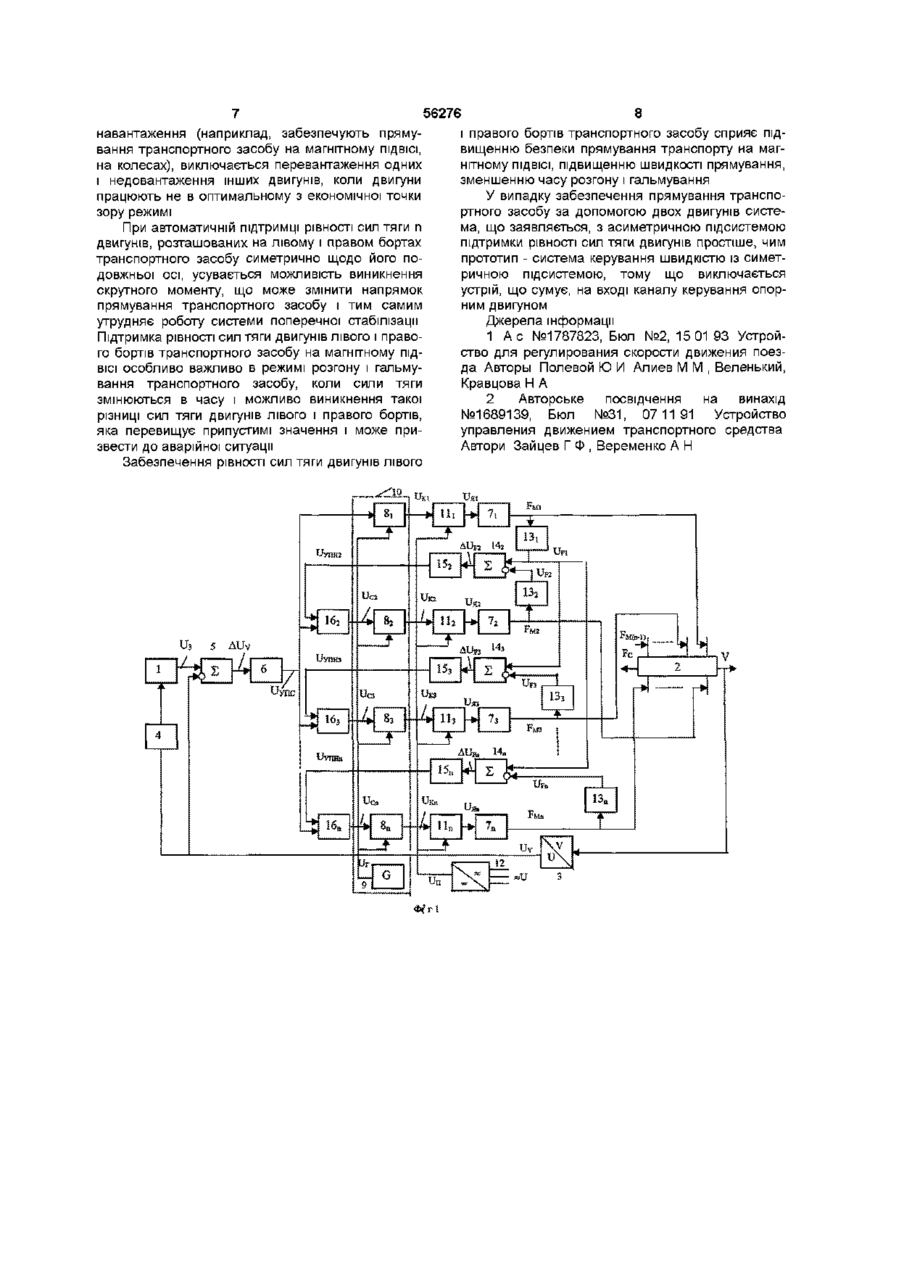
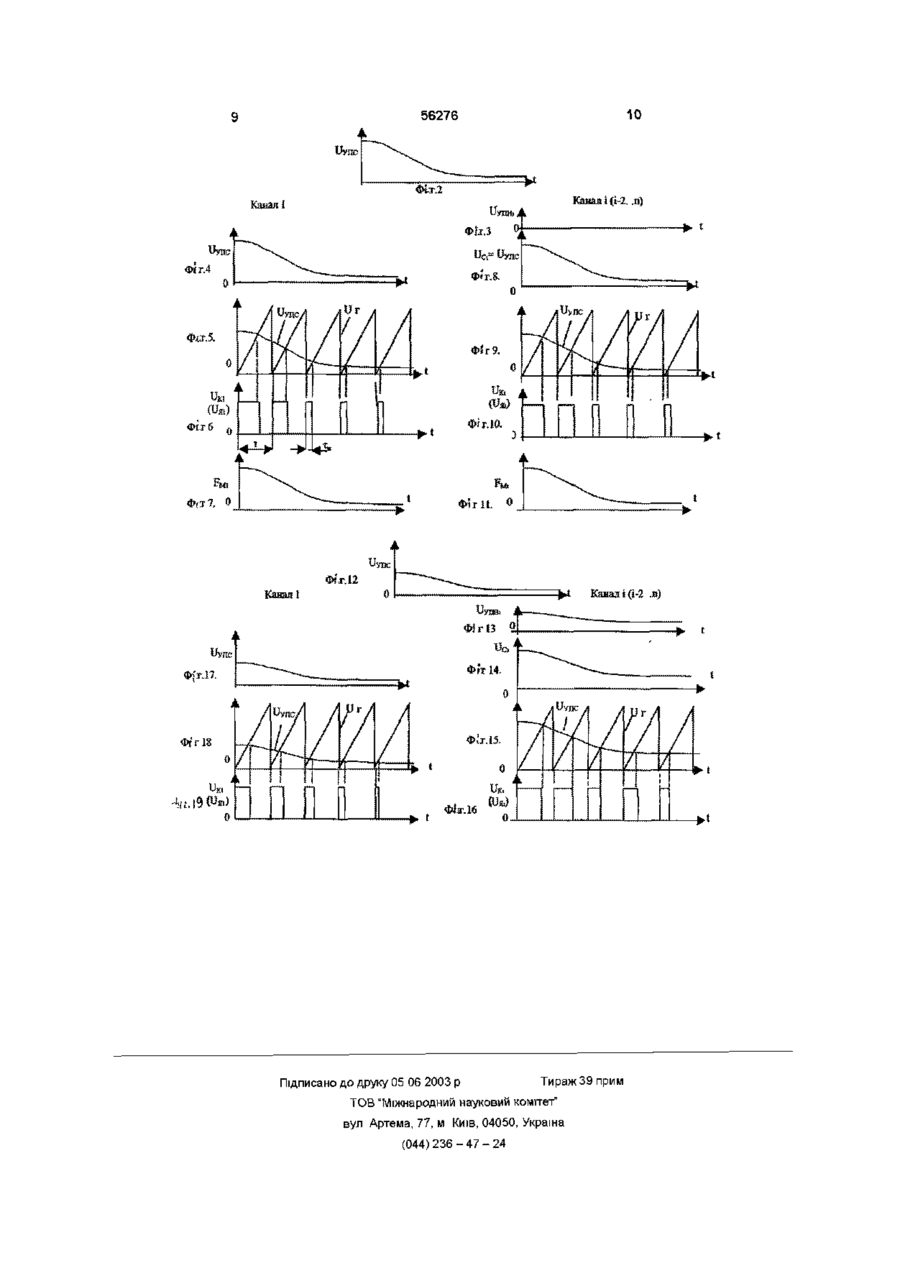
Система керування швидкістю транспортного засобу ЛІНІЙНИМИ двигунами, який складається з програмного пристрою, що виробляє необхідне поточне значення швидкості прямування транспортного засобу, датчика швидкості прямування транспортного засобу, інтегратора, включеного між датчиком швидкості і програмним пристроєм, елемента порівняння швидкостей, на прямий вхід якого надходить сигнал із програмного пристрою, а на інвертуючий вхід - із датчика швидкості, підсилювача-перетворювача системи, вхід якого сполучений із виходом елемента порівняння швидкостей, а його вихідний сигнал надходить на п (по числу тягових ЛІНІЙНИХ двигунів) паралельно включених каналів керування двигунами, у кожний із яких входять послідовно сполучені компаратор, на другий вхід якого надходить сигнал із виходу загального генератора напруги пилкоподібної форми, комутатор, на другий вхід якого подається напруга живлення від загального некерованого випрямляча, а вихід сполучений із входом тягового двигуна, яка відрізняється тим, що сила тяги одного ЛІНІЙНОГО двигуна приймається за опорну і вводяться п-1 автономних асиметричних підсистем автоматичної підтримки рівності сили тяги кожного з інших п-1 двигунів з опорною силою тяги, причому кожна з асиметричних підсистем містить датчик сили тяги даного двигуна, елемент порівняння підсистеми, на прямий вхід якого подається сигнал із датчика опорної сили тяги, а на інвертуючий вхід - сигнал із датчика сили тяги даного двигуна, підсилювач-перетворювач підсистеми, вхід якого сполучений із виходом елемента порівняння підсистеми, а вихідний сигнал надходить на другий вхід суматора, включеного між підсилювачем-перетворювачем системи і компаратором на вході каналу керування даним двигуном О (О (О Винахід ставиться до автоматичного керування, зокрема до керування швидкістю прямування транспортного засобу за допомогою ЛІНІЙНИХ двигунів Відома система керування швидкістю прямування транспортного засобу за допомогою ЛІНІЙНИХ тягових двигунів [1], що складає з елемента порівняння, на входи якого надходить задане, а з датчика швидкості - дійсне значення швидкості прямування транспортного засобу Вихідний сигнал елемента порівняння, рівний різниці швидкостей, подається на функціональний генератор Вихідний сигнал останнього використовується для керування тяговим зусиллям ЛІНІЙНОГО двигуна, а отже, і швидкістю прямування транспортного засобу Недолік даної системи керування швидкістю прямування транспортного засобу складається в тому, що при створенні сили тяги за допомогою декількох двигунів вона не забезпечує рівності сил тяги цих двигунів унаслідок ВІДМІННОСТІ параметрів, характеристик двигунів, зміни по різноманітних законах повітряних зазорів між індукторами і феррорельсами Утих випадках, коли сила тяги створюється за допомогою декількох двигунів, досконалою є система керування швидкістю транспортного засобу із симетричною підсистемою автоматичної підтримки рівності сил тяги двох двигунів або двох груп двигунів, що складається з двох датчиків сил тяги двигунів, елемента порівняння підсистеми, на входи якого з різними знаками надходять напруги з вихо ю 56276 мі досягається завдяки забезпеченню рівності сидів цих датчиків, а сигнал із його виходу через підли тяги кожного окремого з п-1 двигунів із силою силювач-перетворювач підсистеми з різними знатяги одного, прийнятого за опорний, двигуна в реками надходить на два сумуючих устрої, які вклюзультаті керованої зміни сили тяги кожного з цих пчені паралельно до виходу підсилювача1 двигунів У запропонованій системі відсутний перетворювача сигналу помилки керування швидсуматор на вході каналу керування опорним двикістю в кожний із каналів керування тяговим двигугуном Тому при наявності двох тягових двигунів ном [2] асиметрична підсистема підтримки рівності сил Дана система, у котрої одночасно з керувантяги цих двигунів спрощується в порівнянні із синям швидкістю підтримується рівність сили тяги метричною двигунів, прийнята як прототип Недолік системи автоматичного керування Таким чином, устрій, що заявляється, відповішвидкістю транспортного засобу - прототипу дає критерію винаходу "новизна" складається втому, що и застосування обмежене Порівняння винаходу з іншими технічними рі- вона може бути використана тільки у випадках, шеннями, відомими в науці і техніці показує, що коли сила тяги створюється за допомогою двох ВІДОМІ системи, що підтримують рівні швидкості двигунів або двох груп двигунів На практиці часто обертання декількох двигунів, проте за допомогою необхідно підтримувати рівність сил тяги при будьцих систем не вирішується задача підтримки рівякому, утому числі і непарному числі двигунів ності моментів обертання цих двигунів У запропонованій системі керування швидкістю прямування Ціль винаходу полягає в тому, щоб система транспортного засобу за допомогою ЛІНІЙНИХ двикерування швидкістю транспортного засобу разом гунів автоматично підтримується рівність сил тяги із відтворюванням потрібного поточного значения будь-якого (утому числі і непарного) числа тягових швидкості підтримувала рівність сил тяги, утворюдвигунів Це виключає випадок недовантаження ваних будь-яким (утому числі і непарним) числом одних і перевантаження інших двигунів, тобто двигунів, а також у спрощенні самої системи сприяє підвищенню економічної ефективності сисЦіль досягається тем, что в систему керування теми керування прямуванням транспортного засошвидкістю транспортного засобу за допомогою п бу Крім того, при автоматичній підтримці сил тяги тягових двигунів, котра має програмний устрій, двигунів лівого і правого бортів транспортного заякий створює потрібне поточне значення швидкособу виключається можливість виникнення скрутсті у ВІДПОВІДНОСТІ із поступаючою від інтегратора ного моменту, який намагається змінити напрямок інформацією про пройдену відстань, датчик швидпрямування транспортного засобу і призводить до кості, елемент порівняння швидкостей, на один аварійної ситуації Це дозволяє зробити висновок вхід которого поступає сигнал з с вихода програмпро ВІДПОВІДНІСТЬ технічного рішення критерію "ІСного устрою, а на другий вхід, що інвертує, - із даТОТНІ ВІДМІННОСТІ" тчика швидкості, а його вихід включений на вхід підсилювача-перетворювача, вихідний сигнал якоНа фиг 1 зображена функціональна схема сиго надходить паралельно на п - (по числу тягових стеми керування швидкістю транспортного засобу двигунів) каналів керування двигунами, кожний із за допомогою п ЛІНІЙНИХ двигунів, а на фіг 2 19 яких складається з послідовно сполучених компаформи сигналів на елементах схеми ратора широтно-імпульсного модулятора, силовоСистема керування швидкістю транспортного го комутатора і двигуна, умонтованих п-1 асиметзасобу за допомогою п ЛІНІЙНИХ двигунів (фиг 1) ричних підсистем автоматичної підтримки рівності складається із программного устрою 1, який ствосил тяги двигунів шляхом забезпечення окремо рює потрібне поточне ІІз швидкості прямування рівності сили тяги кожного з п-1 двигунів із силою транспортного засобу 2, датчика швидкості 3 прятяги одного, прийнятого за опорний, двигуна, примування транспортного засобу, інтегратора 4, який чому кожна підсистема складається з датчика сивключено поміж датчиком швидкості 3 і програмли тяги даного двигуна, елемента порівняння підним устроєм І, елемента порівняння швидкостей 5, системи, на прямий вхід якого надходить сигнал із на прямий вхід котрого поступає сигнал с проградатчика сили тяги опорного двигуна, а на вхід, що много устрою І, на вхід, що інвертує, - із датчика інвертує, - сигнал із датчика сили тяги даного двишвидкості 3, підсилювача - перетворювача 6, вхід гуна, вихід же елемента порівняння через підсиякого сполучений із виходом елемента порівняння лювач-перетворювач підсистеми сполучений із швидкостей 5, а його вихідний сигнал надходить другим входом суматора, перший вхід якого вклюна п (по числу тягових ЛІНІЙНИХ двигунів) паралечений до виходу підсилювача-перетворювача сигльно включених каналів керування двигунами 7, налу помилки по швидкості, а вихід суматора - до (і= п), у кожний із який входять послідовно сполувходу компаратора каналу керування даним двичені компаратор 8,, що разом із загальним генерагуном тором 9 напруги форми пилки утворює широтноімпульсний модулятор 10, комутатор 11,, на другий Зіставлення з прототипом показує, що устрій, вхід якого подається напруга живлення від загальщо заявляється, дозволяє підтримувати рівність ного некерованого випрямувача 12, а вихід сполусил тяги не тільки двох (двох груп) тягових двигучений із входом двигуна 7,, і введених п-1 асиметнів, а будь-якого числа двигунів Воно замість сиричних підсистем автоматичної підтримки рівності метричної підсистеми (симетричних підсистем) сил тяги двигунів, кожна з яких містить датчик сили має п-1 асиметричних підсистем підтримки рівнотяги 13, (і=2 п), елемент порівняння підсистеми 14 сті сил тяги двигунів На відміну від прототипу, де (і=2 п), на прямий вхід якого подається сигнал с сили тяги двох двигунів вирівнюються в результаті датчика сили тяги 13і двигуна 7-і, прийнятого за їхньої зміни в протилежних напрямках, підтримка опорний, а на вхід, що інвертує, - сигнал із датчика рівності сил тяги двигунів у запропонованій систе 56276 сили тяги 13|(і=2 п), підсилювач - перетворювач підсистеми 15|(і=2 п), вхід якого сполучений із виходом елемента порівняння підсистеми 14|, а вихідний сигнал надходить на другий вхід устрою, що сумує, 16|(і=2 п), включеного між підсилювачем - перетворювачем 6 і компаратором 8|(і=2 п) Для приклада в якості тягового двигуна прийнятий ЛІНІЙНИЙ вентильний двигун постійного струму Система працює так На вхід інтегратора 4 із датчика швидкості 3 надходить напруга Uv, пропорційна швидкості V прямування транспортного засобу 2, а на його виході формується сигнал, пропорційний відстані, що пройдена транспортним засобом Програмний устрій І на підставі інформації, що надходить від інтегратора 4 ВІДПОВІДНО ДО закладеної програми, виробляє необхідне поточне значення швидкості прямування транспортного засобу - заданий вплив V3, що у виді заданої напруги ІІз або цифрового коду надходить на прямий вхід елемента порівняння швидкостей 5 На другий інвертуючий вхід елемента порівняння 5 із датчика швидкості 3 надходить напруга Uv, пропорційна ДІЙСНІЙ ШВИДКОСТІ прямування транспортного засобу Напруга помилки Ally =U3-Uv посилюється й у загальному випадку перетворюється (наприклад, із метою поліпшення динамічних властивостей системи) за допомогою підсилювача - перетворювача 6 Напруга Uync із виходу підсилювача-перетворювача 6 паралельно надходить на входи п (по числу тягових двигунів) каналів керування двигунами 7і 7 П Причому, на вхід каналу керування двигуном 7-і, прийнятого за опорний, напруга Uync надходить безпосередньо (тобто на компаратор 8-і), а на канали керування двигунами lj 7 П через суматоры 16г 16 П ВІДПОВІДНО Нехай канали керування і самі двигуни будуть ідентичні і, отже, сили тяги FMI-FMII, утворювані двигунами 7і 7 П , рівні між собою У цьому випадку напруги AUFI ( I = 2 n) на виходах елементів порівняння 14, (1=2 п) підсистем, а отже і напруги Uynm (і=2 п) на виходах підсилювачів - перетворювачів 15|(і=2 п) рівні нулю (фігЗ) Напруги U Q ( I = 2 n) на виходах суматоров 16,(і=2 п) рівні напрузі Uync, тобто напруги на вході компаратора 8і першого каналу і компараторов 8, (і=2 п) інших каналів рівні між собою (фіг 4,8) На другі входи компараторів 8|(і=1 п) с виходу генератора 9 напруги форми пилки паралельно подається напруга форми пили Ur (фіг 5,9,15,18) Виникаючі ПОСЛІДОВНОСТІ імпульсів напруги UKI і UKI 0=2 п) на виході компаратора 8-і, і компараторів 8,(і=2 п) збігаються за формою між собою (фіг 6,10) Ці імпульси напруги поступають на силові комутатори 11,, (і=1 п) та підключають напругу живлення Un із виходу випрямувача 12 на входи двигунів 7,(і=1 п) Завдяки цьому створюються сили FMI-FMII ЦИХ двигунів, рівні між собою (фіг 7,11) Сумарна сила тяги, прикладена до транспортного засобу 2, долаючи силу опору Fc, забезпечує прямування транспортного засобу зі швидкістю, близькою або рівною заданому значенню Якщо при Fc=const змінилося, наприклад, збільшилося стрибком, задана напруга Ыз, то при цьому також збільшиться напруга помилки AUv =U3-Uv, напруга Uync (фіг 2,4,8), зросте тривалість імпульсів напруги UKI 0=1 п)( фіг 6,10) а отже, збільшаться і сили тяги двигунів, забезпечуючи розгін транспортного засобу В міру наближення швидкості транспортного засобу до заданого значення напруга помилки AU і сили тяги FMI зменшуються (фіг 7,11) На практиці канали керування і самі тягові двигуни 7, (і=1 п) неоднакові Тому у випадку відсутності асиметричних підсистем (елементи 13|(і=1 п), 14,, 15,, 16|(і=І п)) при подачі тої самої напруги Uync на входи каналів керування сили тяги FMI(I=1 n), утворювані двигунами 7, (і=1 п), не будуть рівні між собою У системі, що заявляється, сила тяги одного з двигунів (на фіг 1 сила тяги FMI двигуна 7-і) приймається за опорну і за допомогою п-1 підсистем підтримується рівність сили тяги кожного окремого з двигунів, що залишилися, (двигунів 7г 7П) з опорною СИЛОЮ ТЯГИ ШЛЯХОМ ВІДПОВІДНОЇ ЗМІНИ СИЛИ тяги кожного з цих двигунів Підсистеми працюють автономно й аналогічно друг другу Тому достатньо роздивитися роботу однієї з підсистем Нехай, наприклад, у результаті зменшення магнітного потоку збудження двигуна 7,(і=2 п) відбулося зменшення сили тяги FMI у порівнянні з опорною силою тяги FMI, а отже, зменшення напруги UFI на виході датчика сили тяги 13,(і=2 п) у порівнянні з напругою UFI на виході датчика 13і На виході елемента порівняння підсистеми 14,(і=2 п) виникає позитивний сигнал неузгодженості ( A U F F U F I UFI>0) а на виході підсилювача-перетворювача підсистеми 15, - напруга Uynm позитивної полярності (фіг 13) Останнє, складаючись у суматорі 16|(і=2 п) с напругою Uync (фіг 12), призводить до збільшення напруги U Q (фіг 14) на вході компаратора 8, (і=2 п), до зростання тривалості імпульсів напруг UKI І Uqi (фіг 15,16) у порівнянні з напругою Uync на вході компаратора 8і(фіг17) і тривалістю імпульсів напруг UKI і Uqi (фіг 19) канал керування І При цьому сила тяги FMI двигуна 7,(і=2 п) збільшується, прямуючи до значення опорної сили тяги FMI двигуна 7і При збільшенні ж сили тяги FMI 0=2 п) двигуна 7,, у порівнянні з опорною силою тяги FMI двигуна 7і виникає сигнал помилки AUFI негативної полярності, напруга U Q на вході компаратора 8, зменшується, що призводить у кінцевому рахунку до зменшення сили тяги FMI двигуна 7, У такий спосіб кожна з п-1 підсистем ринеться відновити і підтримувати рівність сили тяги "свого" тягового двигуна із силою тяги опорного двигуна Система керування швидкістю транспортного засобу за допомогою ЛІНІЙНИХ двигунів, що заявляється, володіє техніко-економічними перевагами у порівнянні з прототипом Вмикання в систему керування швидкістю прямування транспорту за допомогою п ЛІНІЙНИХ двигунів п-1 асиметричних підсистем підтримки рівності сил тяги двигунів разом із задачею відтворення необхідної поточної швидкості дозволяє автоматично в кожний момент часу підтримувати рівність сил тяги, утворюваних не тільки двома двигунами, а будь-яким, у тому числі і непарним, числом двигунів При автоматичній підтримці рівності сил тяги п ЛІНІЙНИХ тягових двигунів, що працюють на одне 56276 навантаження (наприклад, забезпечують прямування транспортного засобу на магнітному ПІДВІСІ, на колесах), виключається перевантаження одних і недовантаження інших двигунів, коли двигуни працюють не в оптимальному з економічної точки зору режимі При автоматичній підтримці рівності сил тяги п двигунів, розташованих на лівому і правом бортах транспортного засобу симетрично щодо його подовжньої осі, усувається можливість виникнення скрутного моменту, що може змінити напрямок прямування транспортного засобу і тим самим утрудняє роботу системи поперечної стабілізації Підтримка рівності сил тяги двигунів лівого і правого бортів транспортного засобу на магнітному ПІДВІСІ особливо важливо в режимі розгону і гальмування транспортного засобу, коли сили тяги змінюються в часу і можливо виникнення такої різниці сил тяги двигунів лівого і правого бортів, яка перевищує припустимі значення і може призвести до аварійної ситуації Забезпечення рівності сил тяги двигунів лівого 8 і правого бортів транспортного засобу сприяє підвищенню безпеки прямування транспорту на магнітному ПІДВІСІ, підвищенню швидкості прямування, зменшенню часу розгону і гальмування У випадку забезпечення прямування транспортного засобу за допомогою двох двигунів система, що заявляється, з асиметричною підсистемою підтримки рівності сил тяги двигунів простіше, чим прототип - система керування швидкістю із симетричною підсистемою, тому що виключається устрій, що сумує, на вході каналу керування опорним двигуном Джерела інформації 1 А с №1787823, Бюл №2, 15 01 93 Устройство для регулирования скорости движения поезда Авторы Полевой Ю И Алиев М М , Беленький, Кравцова Н А 2 Авторське посвідчення на винахід №1689139, Бюл №31, 07 1191 Устройство управления движением транспортного средства Автори Зайцев Г Ф , Веременко А Н 10 56276 Кзназ і (і-2. .п) Каналі Фіг.4 Підписано до друку 05 06 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for controlling a high speed vehicle by linear drives
Автори англійськоюZaitsev Hryhorii Frolovych, Hradoboieva Nelia Viktorivna
Назва патенту російськоюСистема управления скоростного транспортного средства линейными двигателями
Автори російськоюЗайцев Григорий Фролович, Градобоева Неля Викторовна
МПК / Мітки
МПК: H02P 5/00, B60L 15/20, B60L 13/00
Мітки: система, лінійними, транспортного, керування, двигунами, засобу, швидкістю
Код посилання
<a href="https://ua.patents.su/5-56276-sistema-keruvannya-shvidkistyu-transportnogo-zasobu-linijjnimi-dvigunami.html" target="_blank" rel="follow" title="База патентів України">Система керування швидкістю транспортного засобу лінійними двигунами</a>
Пристрій для керування акселератором транспортного засобу
Номер патенту: 873
Опубліковано: 16.07.2001
Автори: Сердюк Валерій Дмитрович, Сердюк Лев Валерійович
МПК: B60K 31/00
Мітки: транспортного, керування, пристрій, засобу, акселератором
Формула / Реферат:
Пристрій для керування акселератором транспортного засобу, що містить, розташований у корпусі фіксатор, зв'язаний з педалями акселератора, гальма та зчеплення, який відрізняється тим, що фіксатор зроблений у вигляді електромагнітної катушки, на серцевині якої встановлена упорна ступиця з можливістю контакту з повзуном, який зв'язаний за допомогою тяги з педаллю акселератора, а в корпусі фіксатора встановлена каретка, на якій закріплена...
Система знешкодження вихлопних газів транспортного засобу
Номер патенту: 53021
Опубліковано: 15.01.2003
Автори: Могила Валентин Іванович, Стецько Сергій Михайлович
МПК: F01N 3/08
Мітки: система, засобу, вихлопних, газів, транспортного, знешкодження
Формула / Реферат:
Система знешкодження вихлопних газів транспортного засобу, що містить систему платинових спіралей, яка відрізняється тим, що як систему платинових спіралей використовують систему виробництва, зберігання та використання реагенту.
Гальмова система транспортного засобу
Номер патенту: 52920
Опубліковано: 15.01.2003
Автори: Могила Валентин Іванович, Стецько Сергій Михайлович, Морозов Олександр Михайлович
МПК: B60T 15/60
Мітки: гальмова, транспортного, засобу, система
Формула / Реферат:
Гальмова система транспортного засобу, що містить гальмову магістраль, повітророзподільник з запасним резервуаром, гальмові циліндри, важільні гальмові передачі з гальмовими колодками, яка відрізняється тим, що вона забезпечена пристроєм контролю обертання колеса, приєднаним одним дротом до пристрою керування сигналами, а другим - до пристрою аналізу сигналів.
Система випуску відпрацьованих газів двигуна транспортного засобу
Номер патенту: 28577
Опубліковано: 16.10.2000
Автор: Гладилін Олександр Васильович
Мітки: система, випуску, транспортного, двигуна, засобу, відпрацьованих, газів
Формула / Реферат:
Система випуску відпрацьованих газів двигуна транспортного засобу, яка містить в собі допоміжну гальмову систему, компенсатор, глушник, проміжну та випускну труби, яка відрізняється тим, що допоміжна гальмова система і компенсатор об'єднані конструктивно в одну складальну одиницю.
Система керування віссю транспортного засобу вздовж принаймні однієї рейки на грунті
Номер патенту: 49942
Опубліковано: 15.10.2002
Автори: Корбер Мартін, Андре Жан-Лук
МПК: B62D 1/00
Мітки: керування, грунті, рейки, засобу, вздовж, однієї, віссю, принаймні, система, транспортного
Формула / Реферат:
1. Система керування віссю (8) транспортного засобу, що містить напрямний вузол, який несе два похилі ролики, що зчіплюються з наземною напрямною рейкою, яка відрізняється тим, що напрямний вузол (1) включає дві укосини (2) та (3), що обертаються навколо поперечної осі (7) транспортного засобу і зазнають вертикального навантаження та зусилля спарювання, причому укосини (2) та (3) несуть кожна похилий напрямний ролик (12, 13) або (14, 15), які...
Попередній патент: Спосіб одержання похідних класу таксоїдів
Наступний патент: Опозитний двигун внутрішнього згоряння
Випадковий патент: Горілка "з лимоном"