Ручний культиватор

Формула / Реферат
Ручний культиватор, що містить робочий орган (1), виконаний у вигляді несучого бруса (2), уздовж якого із заданим кроком (t) закріплені робочі елементи (3), рукоятку (4), виконану у вигляді двох держаків (5), які з одного боку пов'язані з несучим брусом (2) робочого органу (1), а з іншого боку сполучені між собою поперечиною (6) і в середній частині відігнуті на кут b від площини O-O розташування робочих елементів (3) у бік від опори (7), виконаної у вигляді горизонтальної балки (8), закріпленої на двох кронштейнах (9), сполучених з держаками (5) рукоятки (4) за допомогою шарнірів (10) з можливістю повороту навколо горизонтальної осі Х-Х і забезпечених знизу упорами (11), на кінцях яких закріплені вилки (12) для взаємодії з держаками (5) рукоятки (4), який відрізняється тим, що держаки (5) рукоятки (4) безпосередньо сполучені з несучим брусом (2) робочого органу (1), за допомогою нероз'ємних (13), переважно зварних, або роз'ємних (14), переважно болтових, з'єднань.
Текст
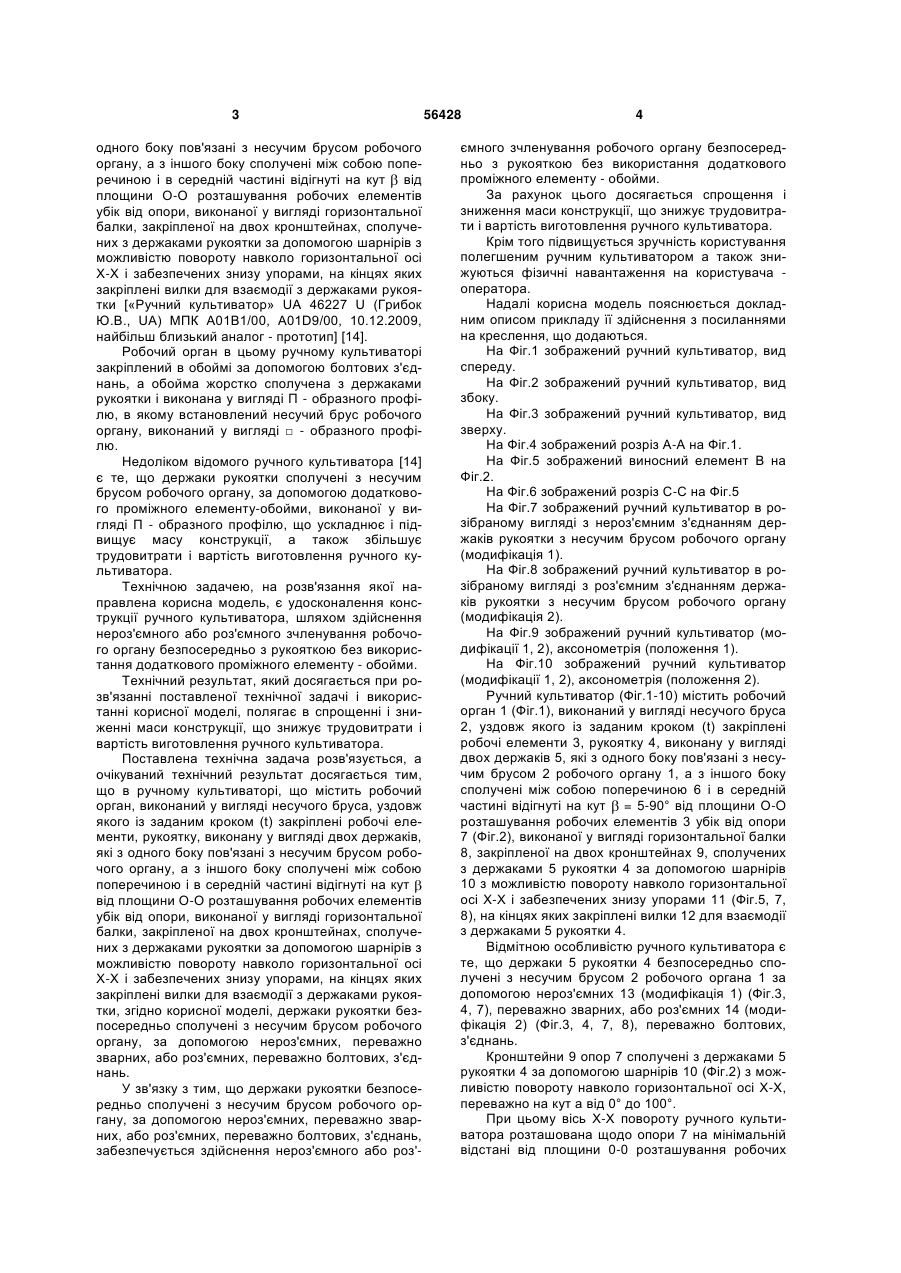
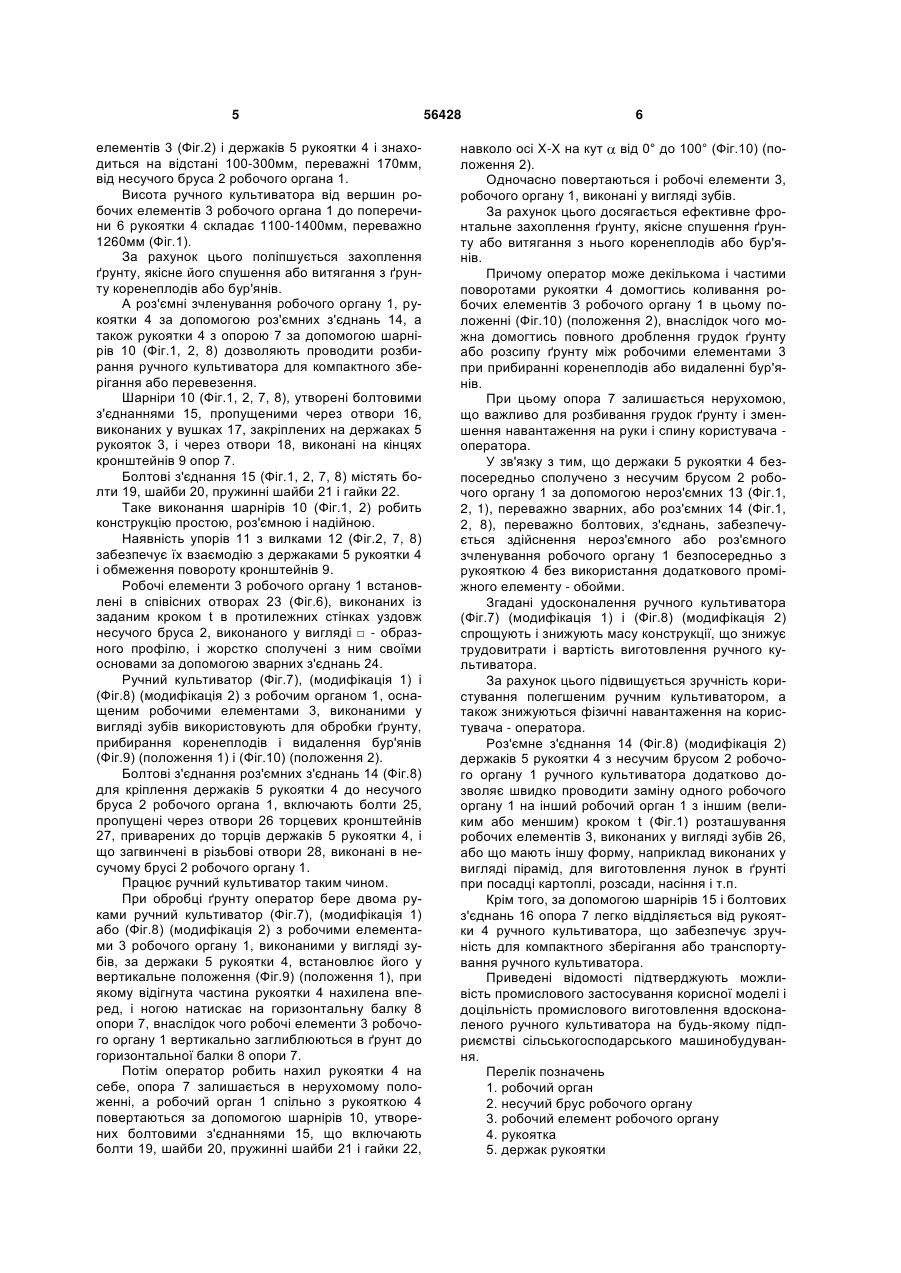
Ручний культиватор, що містить робочий орган (1), виконаний у вигляді несучого бруса (2), уздовж якого із заданим кроком (t) закріплені робочі елементи (3), рукоятку (4), виконану у вигляді двох держаків (5), які з одного боку пов'язані з несучим брусом (2) робочого органу (1), а з іншого боку сполучені між собою поперечиною (6) і в середній частині відігнуті на кут від площини O-O 3 одного боку пов'язані з несучим брусом робочого органу, а з іншого боку сполучені між собою поперечиною і в середній частині відігнуті на кут від площини O-O розташування робочих елементів убік від опори, виконаної у вигляді горизонтальної балки, закріпленої на двох кронштейнах, сполучених з держаками рукоятки за допомогою шарнірів з можливістю повороту навколо горизонтальної осі Х-Х і забезпечених знизу упорами, на кінцях яких закріплені вилки для взаємодії з держаками рукоятки [«Ручний культиватор» UA 46227 U (Грибок Ю.В., UA) МПК А01В1/00, A01D9/00, 10.12.2009, найбільш близький аналог - прототип] [14]. Робочий орган в цьому ручному культиваторі закріплений в обоймі за допомогою болтових з'єднань, а обойма жорстко сполучена з держаками рукоятки і виконана у вигляді П - образного профілю, в якому встановлений несучий брус робочого органу, виконаний у вигляді □ - образного профілю. Недоліком відомого ручного культиватора [14] є те, що держаки рукоятки сполучені з несучим брусом робочого органу, за допомогою додаткового проміжного елементу-обойми, виконаної у вигляді П - образного профілю, що ускладнює і підвищує масу конструкції, а також збільшує трудовитрати і вартість виготовлення ручного культиватора. Технічною задачею, на розв'язання якої направлена корисна модель, є удосконалення конструкції ручного культиватора, шляхом здійснення нероз'ємного або роз'ємного зчленування робочого органу безпосередньо з рукояткою без використання додаткового проміжного елементу - обойми. Технічний результат, який досягається при розв'язанні поставленої технічної задачі і використанні корисної моделі, полягає в спрощенні і зниженні маси конструкції, що знижує трудовитрати і вартість виготовлення ручного культиватора. Поставлена технічна задача розв'язується, а очікуваний технічний результат досягається тим, що в ручному культиваторі, що містить робочий орган, виконаний у вигляді несучого бруса, уздовж якого із заданим кроком (t) закріплені робочі елементи, рукоятку, виконану у вигляді двох держаків, які з одного боку пов'язані з несучим брусом робочого органу, а з іншого боку сполучені між собою поперечиною і в середній частині відігнуті на кут від площини O-O розташування робочих елементів убік від опори, виконаної у вигляді горизонтальної балки, закріпленої на двох кронштейнах, сполучених з держаками рукоятки за допомогою шарнірів з можливістю повороту навколо горизонтальної осі Х-Х і забезпечених знизу упорами, на кінцях яких закріплені вилки для взаємодії з держаками рукоятки, згідно корисної моделі, держаки рукоятки безпосередньо сполучені з несучим брусом робочого органу, за допомогою нероз'ємних, переважно зварних, або роз'ємних, переважно болтових, з'єднань. У зв'язку з тим, що держаки рукоятки безпосередньо сполучені з несучим брусом робочого органу, за допомогою нероз'ємних, переважно зварних, або роз'ємних, переважно болтових, з'єднань, забезпечується здійснення нероз'ємного або роз' 56428 4 ємного зчленування робочого органу безпосередньо з рукояткою без використання додаткового проміжного елементу - обойми. За рахунок цього досягається спрощення і зниження маси конструкції, що знижує трудовитрати і вартість виготовлення ручного культиватора. Крім того підвищується зручність користування полегшеним ручним культиватором а також знижуються фізичні навантаження на користувача оператора. Надалі корисна модель пояснюється докладним описом прикладу її здійснення з посиланнями на креслення, що додаються. На Фіг.1 зображений ручний культиватор, вид спереду. На Фіг.2 зображений ручний культиватор, вид збоку. На Фіг.3 зображений ручний культиватор, вид зверху. На Фіг.4 зображений розріз А-А на Фіг.1. На Фіг.5 зображений виносний елемент В на Фіг.2. На Фіг.6 зображений розріз С-С на Фіг.5 На Фіг.7 зображений ручний культиватор в розібраному вигляді з нероз'ємним з'єднанням держаків рукоятки з несучим брусом робочого органу (модифікація 1). На Фіг.8 зображений ручний культиватор в розібраному вигляді з роз'ємним з'єднанням держаків рукоятки з несучим брусом робочого органу (модифікація 2). На Фіг.9 зображений ручний культиватор (модифікації 1, 2), аксонометрія (положення 1). На Фіг.10 зображений ручний культиватор (модифікації 1, 2), аксонометрія (положення 2). Ручний культиватор (Фіг.1-10) містить робочий орган 1 (Фіг.1), виконаний у вигляді несучого бруса 2, уздовж якого із заданим кроком (t) закріплені робочі елементи 3, рукоятку 4, виконану у вигляді двох держаків 5, які з одного боку пов'язані з несучим брусом 2 робочого органу 1, а з іншого боку сполучені між собою поперечиною 6 і в середній частині відігнуті на кут = 5-90° від площини O-O розташування робочих елементів 3 убік від опори 7 (Фіг.2), виконаної у вигляді горизонтальної балки 8, закріпленої на двох кронштейнах 9, сполучених з держаками 5 рукоятки 4 за допомогою шарнірів 10 з можливістю повороту навколо горизонтальної осі Х-Х і забезпечених знизу упорами 11 (Фіг.5, 7, 8), на кінцях яких закріплені вилки 12 для взаємодії з держаками 5 рукоятки 4. Відмітною особливістю ручного культиватора є те, що держаки 5 рукоятки 4 безпосередньо сполучені з несучим брусом 2 робочого органа 1 за допомогою нероз'ємних 13 (модифікація 1) (Фіг.3, 4, 7), переважно зварних, або роз'ємних 14 (модифікація 2) (Фіг.3, 4, 7, 8), переважно болтових, з'єднань. Кронштейни 9 опор 7 сполучені з держаками 5 рукоятки 4 за допомогою шарнірів 10 (Фіг.2) з можливістю повороту навколо горизонтальної осі Х-Х, переважно на кут а від 0° до 100°. При цьому вісь Х-Х повороту ручного культиватора розташована щодо опори 7 на мінімальній відстані від площини 0-0 розташування робочих 5 елементів 3 (Фіг.2) і держаків 5 рукоятки 4 і знаходиться на відстані 100-300мм, переважні 170мм, від несучого бруса 2 робочого органа 1. Висота ручного культиватора від вершин робочих елементів 3 робочого органа 1 до поперечини 6 рукоятки 4 складає 1100-1400мм, переважно 1260мм (Фіг.1). За рахунок цього поліпшується захоплення ґрунту, якісне його спушення або витягання з ґрунту коренеплодів або бур'янів. А роз'ємні зчленування робочого органу 1, рукоятки 4 за допомогою роз'ємних з'єднань 14, а також рукоятки 4 з опорою 7 за допомогою шарнірів 10 (Фіг.1, 2, 8) дозволяють проводити розбирання ручного культиватора для компактного зберігання або перевезення. Шарніри 10 (Фіг.1, 2, 7, 8), утворені болтовими з'єднаннями 15, пропущеними через отвори 16, виконаних у вушках 17, закріплених на держаках 5 рукояток 3, і через отвори 18, виконані на кінцях кронштейнів 9 опор 7. Болтові з'єднання 15 (Фіг.1, 2, 7, 8) містять болти 19, шайби 20, пружинні шайби 21 і гайки 22. Таке виконання шарнірів 10 (Фіг.1, 2) робить конструкцію простою, роз'ємною і надійною. Наявність упорів 11 з вилками 12 (Фіг.2, 7, 8) забезпечує їх взаємодію з держаками 5 рукоятки 4 і обмеження повороту кронштейнів 9. Робочі елементи 3 робочого органу 1 встановлені в співісних отворах 23 (Фіг.6), виконаних із заданим кроком t в протилежних стінках уздовж несучого бруса 2, виконаного у вигляді □ - образного профілю, і жорстко сполучені з ним своїми основами за допомогою зварних з'єднань 24. Ручний культиватор (Фіг.7), (модифікація 1) і (Фіг.8) (модифікація 2) з робочим органом 1, оснащеним робочими елементами 3, виконаними у вигляді зубів використовують для обробки ґрунту, прибирання коренеплодів і видалення бур'янів (Фіг.9) (положення 1) і (Фіг.10) (положення 2). Болтові з'єднання роз'ємних з'єднань 14 (Фіг.8) для кріплення держаків 5 рукоятки 4 до несучого бруса 2 робочого органа 1, включають болти 25, пропущені через отвори 26 торцевих кронштейнів 27, приварених до торців держаків 5 рукоятки 4, і що загвинчені в різьбові отвори 28, виконані в несучому брусі 2 робочого органу 1. Працює ручний культиватор таким чином. При обробці ґрунту оператор бере двома руками ручний культиватор (Фіг.7), (модифікація 1) або (Фіг.8) (модифікація 2) з робочими елементами 3 робочого органу 1, виконаними у вигляді зубів, за держаки 5 рукоятки 4, встановлює його у вертикальне положення (Фіг.9) (положення 1), при якому відігнута частина рукоятки 4 нахилена вперед, і ногою натискає на горизонтальну балку 8 опори 7, внаслідок чого робочі елементи 3 робочого органу 1 вертикально заглиблюються в ґрунт до горизонтальної балки 8 опори 7. Потім оператор робить нахил рукоятки 4 на себе, опора 7 залишається в нерухомому положенні, а робочий орган 1 спільно з рукояткою 4 повертаються за допомогою шарнірів 10, утворених болтовими з'єднаннями 15, що включають болти 19, шайби 20, пружинні шайби 21 і гайки 22, 56428 6 навколо осі Х-Х на кут від 0° до 100° (Фіг.10) (положення 2). Одночасно повертаються і робочі елементи 3, робочого органу 1, виконані у вигляді зубів. За рахунок цього досягається ефективне фронтальне захоплення ґрунту, якісне спушення ґрунту або витягання з нього коренеплодів або бур'янів. Причому оператор може декількома і частими поворотами рукоятки 4 домогтись коливання робочих елементів 3 робочого органу 1 в цьому положенні (Фіг.10) (положення 2), внаслідок чого можна домогтись повного дроблення грудок ґрунту або розсипу ґрунту між робочими елементами 3 при прибиранні коренеплодів або видаленні бур'янів. При цьому опора 7 залишається нерухомою, що важливо для розбивання грудок ґрунту і зменшення навантаження на руки і спину користувача оператора. У зв'язку з тим, що держаки 5 рукоятки 4 безпосередньо сполучено з несучим брусом 2 робочого органу 1 за допомогою нероз'ємних 13 (Фіг.1, 2, 1), переважно зварних, або роз'ємних 14 (Фіг.1, 2, 8), переважно болтових, з'єднань, забезпечується здійснення нероз'ємного або роз'ємного зчленування робочого органу 1 безпосередньо з рукояткою 4 без використання додаткового проміжного елементу - обойми. Згадані удосконалення ручного культиватора (Фіг.7) (модифікація 1) і (Фіг.8) (модифікація 2) спрощують і знижують масу конструкції, що знижує трудовитрати і вартість виготовлення ручного культиватора. За рахунок цього підвищується зручність користування полегшеним ручним культиватором, а також знижуються фізичні навантаження на користувача - оператора. Роз'ємне з'єднання 14 (Фіг.8) (модифікація 2) держаків 5 рукоятки 4 з несучим брусом 2 робочого органу 1 ручного культиватора додатково дозволяє швидко проводити заміну одного робочого органу 1 на інший робочий орган 1 з іншим (великим або меншим) кроком t (Фіг.1) розташування робочих елементів 3, виконаних у вигляді зубів 26, або що мають іншу форму, наприклад виконаних у вигляді пірамід, для виготовлення лунок в ґрунті при посадці картоплі, розсади, насіння і т.п. Крім того, за допомогою шарнірів 15 і болтових з'єднань 16 опора 7 легко відділяється від рукоятки 4 ручного культиватора, що забезпечує зручність для компактного зберігання або транспортування ручного культиватора. Приведені відомості підтверджують можливість промислового застосування корисної моделі і доцільність промислового виготовлення вдосконаленого ручного культиватора на будь-якому підприємстві сільськогосподарського машинобудування. Перелік позначень 1. робочий орган 2. несучий брус робочого органу 3. робочий елемент робочого органу 4. рукоятка 5. держак рукоятки 7 6. поперечина рукоятки 7. опора 8. горизонтальна балка опори 9. кронштейн опори 10. шарнір з'єднання кронштейнів опори з держаками рукоятки 11. упор опори 12. вилка упору опори 13. нероз'ємне з'єднання держаків рукоятки з несучим брусом робочого органу 14. роз'ємне з'єднання держаків рукоятки з несучим брусом робочого органу 15. болтове з'єднання шарніра з'єднання опори з рукояткою 16. отвір проушини держака рукоятки 17. вушка держака рукоятки 18. отвір кронштейна опори 19. болт болтового з'єднання шарніра з'єднання опори з рукояткою 56428 8 20. шайба болтового з'єднання шарніра з'єднання опори з рукояткою 21. пружинна шайба болтового з'єднання шарніра з'єднання опори з рукояткою 22. гайка болтового з'єднання шарніра з'єднання опори з рукояткою 23. отвори в брусі робочого органу, що несе, для робочих елементів 24. зварні з'єднання робочих елементів з несучим брусом робочого органу 25. болт роз'ємного з'єднання держаків рукоятки з несучим брусом робочого органу 26. отвір в торцевому кронштейні держака рукоятки 27. торцевий кронштейн держака рукоятки 28. різьбовий отвір в несучому брусі робочого органу під болт роз'ємного з'єднання держаків рукоятки з несучим брусом робочого органу 9 Комп’ютерна верстка Л. Купенко 56428 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюHand cultivator
Автори англійськоюHrybok Yurii Viktorovych
Назва патенту російськоюРучной культиватор
Автори російськоюГрибок Юрий Викторович
МПК / Мітки
Мітки: ручний, культиватор
Код посилання
<a href="https://ua.patents.su/5-56428-ruchnijj-kultivator.html" target="_blank" rel="follow" title="База патентів України">Ручний культиватор</a>
Ручний культиватор
Номер патенту: 46227
Опубліковано: 10.12.2009
Автор: Грибок Юрій Вікторович
Мітки: культиватор, ручний
Формула / Реферат:
1. Ручний культиватор, що містить робочий орган (1), виконаний у вигляді несучого бруса (2), уздовж якого із заданим кроком (t) закріплені робочі елементи (3), рукоятку (4), виконану у вигляді двох держаків (5), які з одного боку зв'язані з несучим брусом (2) робочого органу (1), а з іншого боку сполучені між собою поперечиною (6), а також опору (7), виконану у вигляді горизонтальної балки (8), закріпленої на двох кронштейнах (9), зв'язаних з...
Ручний культиватор
Номер патенту: 48152
Опубліковано: 10.03.2010
Автор: Яхно Анатолій Анатолійович
МПК: A01B 1/06
Мітки: ручний, культиватор
Формула / Реферат:
1. Ручний культиватор складається з вертикальної стійки з робочим органом з одного боку і горизонтальної ручки з другого боку, який відрізняється тим, що горизонтальна ручка виконана увігнутою, вертикальна стійка рознімна за допомогою гайкоболтового з'єднання, робочий орган виконаний у вигляді просторових паралельно направлених за годинниковою стрілкою спіралеподібних зубців.2. Ручний культиватор за п. 1, який відрізняється тим,...
Ручний культиватор

Номер патенту: 55832
Опубліковано: 15.04.2003
Автор: Амелін Олексій Павлович
МПК: A01B 1/06
Мітки: ручний, культиватор
Формула / Реферат:
1. Ручний культиватор, що містить раму, оснащену ручками і ходовим колесом, встановленим в ній на осі, і робочий інструмент із різальною кромкою, розміщений на рамі, який відрізняється тим, що рама виконана у вигляді скріплених перемичками двох напрямних, на котрих шарнірно закріплені дугоподібні державки з можливістю зміни кута між поздовжньою віссю напрямної і дотичної до зовнішньої поверхні державки, а робочий інструмент виконаний у...
Ручний інструмент для обробітку ґрунту
Номер патенту: 45810
Опубліковано: 25.11.2009
Автор: Козодой Олександр Миколайович
Мітки: ґрунту, обробітку, інструмент, ручний
Формула / Реферат:
1. Ручний інструмент для обробітку ґрунту, що містить профільну основу з зубами, до якої прикріплений поручень у вигляді двох держаків з горизонтальною перекладиною, оснащений перемичкою, який відрізняється тим, що до профільної основи перпендикулярно зубам жорстко прикріплена П-подібна опора, а в місці кріплення перемички держаки мають кутовий вигин у бік, протилежний кріпленню П-подібної опори.2. Ручний інструмент для обробітку...
Культиватор широкозахватний напівпричіпний
Номер патенту: 658
Опубліковано: 16.10.2000
Автори: Безуглий Віталій Миколайович, Ковтун Володимир Йосипович, Помуран Михайло Іванович, Самсонова Світлана Анатоліївна
МПК: A01B 17/00, A01B 33/00
Мітки: культиватор, широкозахватний, напівпричіпний
Формула / Реферат:
Культиватор широкозахватний напівпричіп-ний, що включає в себе культиваторний блок з встановленими на ньому блоками вирівнюючих дисків та контактувальних котків, який відрізняється тим, що містить додатково транспортний візок та дишло, з'єднані з культиватор ним блоком.
Попередній патент: Спосіб годівлі личинок веслоноса
Наступний патент: Спосіб оцінки ступеня старіння трансформаторних масел в баках силових високовольтних маслонаповнених трансформаторів
Випадковий патент: Автоматизований спосіб обробки та передачі електронних даних для управління готелем за допомогою мережі інтернет на сторонні сайти через комп'ютер адміністратора