Маятниковий прилад для визначення вертикалі землі та кутів тангажу і крену на рухомому об’єкті (маятник карпачева)


Формула / Реферат
1. Маятниковий прилад для визначення вертикалі Землі та кутів тангажу і крену на рухомому об'єкті, який містить однокоординатний фізичний маятник, механічно з'єднаний з датчиком кута, датчиком моменту, демпфером механічних коливань та посилювачем зворотного зв'язку, причому датчик кута маятника жорстко з'єднаний з основою рухомого об'єкта, який відрізняється тим, що він додатково містить триланковий сателітний механізм, в якому вісь обертання сателітного колеса встановлена паралельно осі маятника та жорстко з'єднана з нею; вісь центрального колеса розміщена на одній прямій з віссю обертання маятника та жорстко з'єднана з корпусом рухомого об'єкта, а сателітне колесо оснащено датчиком кута.
2. Маятниковий прилад для визначення вертикалі Землі та кутів тангажу і крену на рухомому об'єкті за п. 1, який відрізняється тим, що додатково містить другий маятниковий прилад, вісь обертання якого перпендикулярна осі обертання першого маятника, при цьому вісь обертання другого маятника паралельна осі крену об'єкта.
Текст
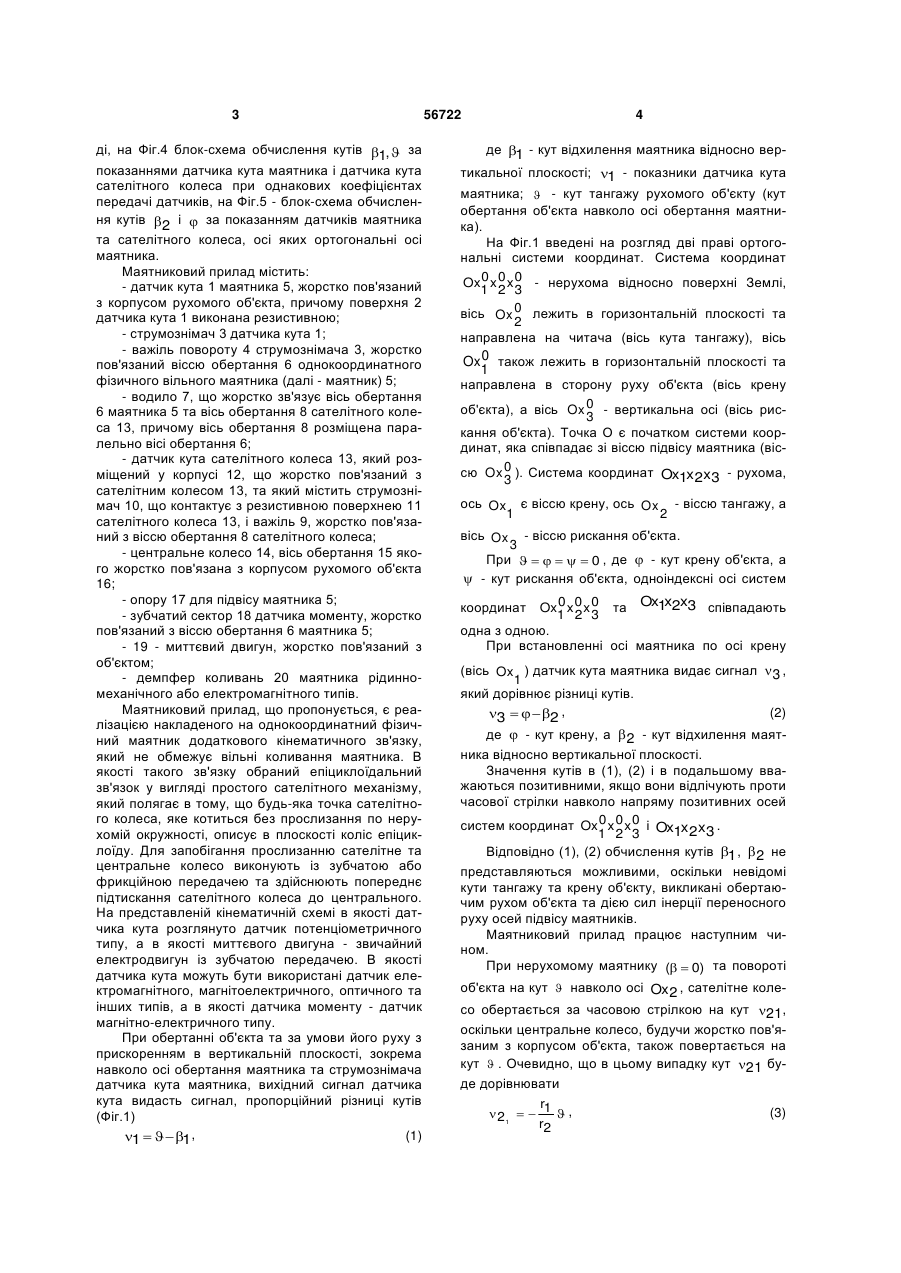
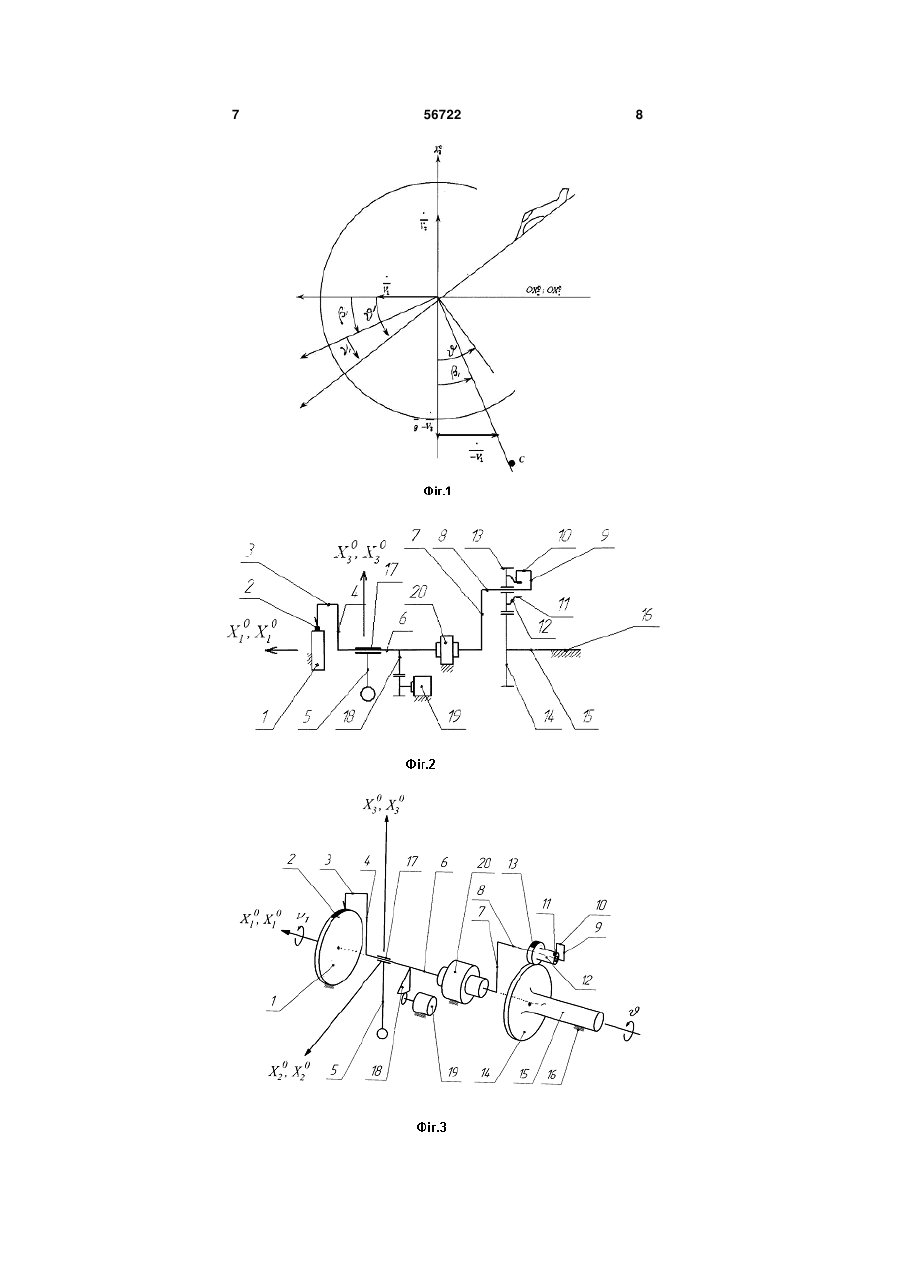
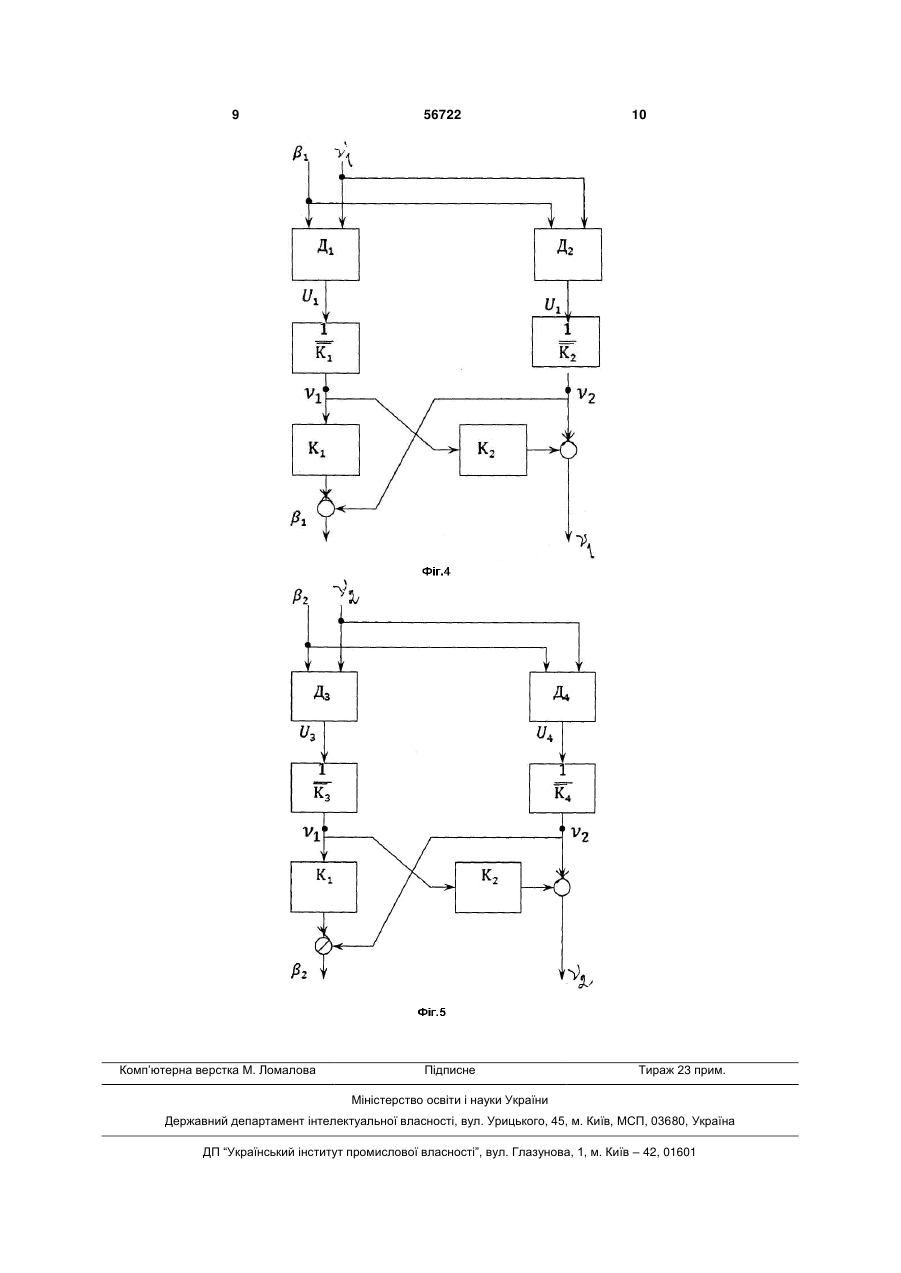
1. Маятниковий прилад для визначення вертикалі Землі та кутів тангажу і крену на рухомому об'єкті, який містить однокоординатний фізичний маятник, механічно з'єднаний з датчиком кута, датчиком моменту, демпфером механічних коливань та посилювачем зворотного зв'язку, причому датчик кута маятника жорстко з'єднаний з основою рухомого об'єкта, який відрізняється тим, що він 3 ді, на Фіг.4 блок-схема обчислення кутів 1, за показаннями датчика кута маятника і датчика кута сателітного колеса при однакових коефіцієнтах передачі датчиків, на Фіг.5 - блок-схема обчислення кутів 2 і за показанням датчиків маятника та сателітного колеса, осі яких ортогональні осі маятника. Маятниковий прилад містить: - датчик кута 1 маятника 5, жорстко пов'язаний з корпусом рухомого об'єкта, причому поверхня 2 датчика кута 1 виконана резистивною; - струмознімач 3 датчика кута 1; - важіль повороту 4 струмознімача 3, жорстко пов'язаний віссю обертання 6 однокоординатного фізичного вільного маятника (далі - маятник) 5; - водило 7, що жорстко зв'язує вісь обертання 6 маятника 5 та вісь обертання 8 сателітного колеса 13, причому вісь обертання 8 розміщена паралельно вісі обертання 6; - датчик кута сателітного колеса 13, який розміщений у корпусі 12, що жорстко пов'язаний з сателітним колесом 13, та який містить струмознімач 10, що контактує з резистивною поверхнею 11 сателітного колеса 13, і важіль 9, жорстко пов'язаний з віссю обертання 8 сателітного колеса; - центральне колесо 14, вісь обертання 15 якого жорстко пов'язана з корпусом рухомого об'єкта 16; - опору 17 для підвісу маятника 5; - зубчатий сектор 18 датчика моменту, жорстко пов'язаний з віссю обертання 6 маятника 5; - 19 - миттєвий двигун, жорстко пов'язаний з об'єктом; - демпфер коливань 20 маятника рідинномеханічного або електромагнітного типів. Маятниковий прилад, що пропонується, є реалізацією накладеного на однокоординатний фізичний маятник додаткового кінематичного зв'язку, який не обмежує вільні коливання маятника. В якості такого зв'язку обраний епіциклоїдальний зв'язок у вигляді простого сателітного механізму, який полягає в тому, що будь-яка точка сателітного колеса, яке котиться без прослизання по нерухомій окружності, описує в плоскості коліс епіциклоїду. Для запобігання прослизанню сателітне та центральне колесо виконують із зубчатою або фрикційною передачею та здійснюють попереднє підтискання сателітного колеса до центрального. На представленій кінематичній схемі в якості датчика кута розглянуто датчик потенціометричного типу, а в якості миттєвого двигуна - звичайний електродвигун із зубчатою передачею. В якості датчика кута можуть бути використані датчик електромагнітного, магнітоелектричного, оптичного та інших типів, а в якості датчика моменту - датчик магнітно-електричного типу. При обертанні об'єкта та за умови його руху з прискоренням в вертикальній плоскості, зокрема навколо осі обертання маятника та струмознімача датчика кута маятника, вихідний сигнал датчика кута видасть сигнал, пропорційний різниці кутів (Фіг.1) (1) 1 1 , 56722 4 де 1 - кут відхилення маятника відносно вертикальної плоскості; 1 - показники датчика кута маятника; - кут тангажу рухомого об'єкту (кут обертання об'єкта навколо осі обертання маятника). На Фіг.1 введені на розгляд дві праві ортогональні системи координат. Система координат Ox0 x 0 x 0 - нерухома відносно поверхні Землі, 1 2 3 вісь Ox 0 лежить в горизонтальній плоскості та 2 направлена на читача (вісь кута тангажу), вісь Ox 0 також лежить в горизонтальній плоскості та 1 направлена в сторону руху об'єкта (вісь крену об'єкта), а вісь Ox 0 - вертикальна осі (вісь рис3 кання об'єкта). Точка О є початком системи координат, яка співпадає зі віссю підвісу маятника (віссю Ox 0 ). Система координат Ox1x 2x3 - рухома, 3 ось Ox є віссю крену, ось Ox - віссю тангажу, а 2 1 вісь Ox - віссю рискання об'єкта. 3 При 0 , де - кут крену об'єкта, а - кут рискання об'єкта, одноіндексні осі систем координат Ox0 x 0 x 0 та Ox1x2x3 співпадають 1 2 3 одна з одною. При встановленні осі маятника по осі крену (вісь Ox ) датчик кута маятника видає сигнал 3 , 1 який дорівнює різниці кутів. (2) 3 2 , де - кут крену, a 2 - кут відхилення маятника відносно вертикальної плоскості. Значення кутів в (1), (2) і в подальшому вважаються позитивними, якщо вони відлічують проти часової стрілки навколо напряму позитивних осей систем координат Ox0 x 0 x 0 і Ox1x 2x3 . 1 2 3 Відповідно (1), (2) обчислення кутів 1 , 2 не представляються можливими, оскільки невідомі кути тангажу та крену об'єкту, викликані обертаючим рухом об'єкта та дією сил інерції переносного руху осей підвісу маятників. Маятниковий прилад працює наступним чином. При нерухомому маятнику ( 0) та повороті об'єкта на кут навколо осі Ox 2 , сателітне колесо обертається за часовою стрілкою на кут 21, оскільки центральне колесо, будучи жорстко пов'язаним з корпусом об'єкта, також повертається на кут . Очевидно, що в цьому випадку кут 21 буде дорівнювати r (3) 21 1 , r2 5 56722 де r1 - радіус центрального колеса, r2 - радіус сателітного колеса. При нерухомій основі, а отже і нерухомому центральному колесі, при обертанні маятника на кут 1 сателітне колесо повертається проти часової стрілки на кут 2 , рівний 2 r r (4) 2 2 1 2 1. r2 Тоді кут оберту сателітного колеса при повороті основи на кут і повороті маятника на кут 1 буде дорівнювати відповідно (3), (4) сумі 1 2 2 2 [r1 (r1 r2 )1] (5) 2 1 r2 Вирішивши рівняння (1),(4) відносно кутів 1, , отримаємо 1 K11 2 , K21 2 , де r r r K1 1 ; K 2 1 2 r2 r2 (6) (7) Блок-схема обчислення кутів 1, за показаннями датчика кута маятника і датчика кута сателіта при однакових коефіцієнтах передачі датчиків показана на Фіг.4. Нагадаємо, що в (6) величини 1, 1, 1, 2 мають безрозмірну величину. Якщо датчики кутів Д1, Д2 , мають різну крутизну вихідних сигналів, то легко показати, що вираз (6) прийме наступний вид 1 K11 n2 , (8) K21 n2 де n - рівне відношенню крутизни датчика Д1 до крутизни вихідних сигналів датчика Д2 : n K1 K2 , (9) де K 1 - крутизна вихідного сигналу датчика Д1 , а K 2 - крутизна вихідного сигналу датчика Д2 . При однакових радіусах коліс датчика кута та сателітного колеса, тобто, при r1 r2 r рівняння (6) набуває вигляд 1 1 2 , (10) 21 2 , що визначає 1 1 (11) 2 21 , тобто, сателітне колесо при 0 повертається на кут 21 6 Таким чином накладання до осі обертання маятника додаткового епіциклоїдального кінематичного зв'язку у вигляді простого трьохланкового сателітного механізму дозволяє визначити за допомогою найпростіших обчислень не тільки кут відхилення маятника відносно вертикальної плоскості Землі, але й кут тангажу об'єкта , що суттєво розширює функціональні можливості такого фізичного маятника. При установці такого же маятника (другого маятника) по осі Ox1 (вісь крену об'єкта) з такими же параметрами, як і у першого маятника, для другого маятника можна отримати аналогічні (7), (9) вирази. 2 K13 n 4 , (12) K23 n4 де 3 - кут, який реєструється датчиком кута, встановленим по осі другого маятника; 4 - кут, який реєструється датчиком кута, встановленим по осі обертання сателіта; 2 - кут відхилення маятника відносно вертикальної плоскості; - кут крену об'єкта, що виходить за допомогою повороту об'єкта проти часової стрілки навколо позитивного напрямку осі Ox 0 ; n, K1, K2 - безрозмірні коефіціє1 нти які обчислюють за формулою (6), (8) Блок-схема обчислення кутів 2 i за показанням датчиків маятника Д3 та сателітного колеса Д4 показано на Фіг.5. Отже, при встановленні двох описаних маятників із взаємно перпендикулярним розташуванням їх осей, утворюється система виміру та обчислення двох координат визначення вертикалі Землі на основі, що обертається та рухається з прискоренням, з можливістю передачі Інформації по кутам тангажу та крену об'єкта в систему управління рухом об'єкта. І, нарешті, якщо формуючий в обчислювальному пристрої маятників кут 1 і 2 подать в ланцюг негативного зворотного зв'язку маятників, який складається із датчиків кута, миттєвих двигунів та посилювачів зворотного зв'язку з позиційним інтеро-диференційним контуром (ПІД регулятором), то вийде стійка, задемпфомована двохкоординатна маятникова вертикаль з довільним періодом особистих коливань та з незалежною (інваріантною) з точністю до перехідних процесів від переносних прискорень рухомого об'єкту. Використання фізичного маятника, із сателітним механізмом в якості датчиків кута тангажу та крену об'єкта, який розглядався вище, дозволяє виключити застосування дорогих гіроскопічних приладів (вільних та коригуючих гіроскопів, однороторних та багатороторних гіровертикалей). 7 56722 8 9 Комп’ютерна верстка М. Ломалова 56722 Підписне 10 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPendulum device for determination of vertical of earth and angles of pitch and heel on movable object (karpachovs pendulum)
Автори англійськоюKarpachov Yurii Andriiovych
Назва патенту російськоюМаятниковый прибор для определения вертикали земли и углов тангажа и kpeha ha подвижном объекте (маятник карпачева)
Автори російськоюКарпачов Юрий Андреевич
МПК / Мітки
МПК: G01B 7/00
Мітки: маятниковий, карпачева, визначення, землі, маятник, рухомому, кутів, вертикалі, тангажу, об'єкти, прилад, крену
Код посилання
<a href="https://ua.patents.su/5-56722-mayatnikovijj-prilad-dlya-viznachennya-vertikali-zemli-ta-kutiv-tangazhu-i-krenu-na-rukhomomu-obehkti-mayatnik-karpacheva.html" target="_blank" rel="follow" title="База патентів України">Маятниковий прилад для визначення вертикалі землі та кутів тангажу і крену на рухомому об’єкті (маятник карпачева)</a>
Спосіб визначення вертикалі на рухомому об’єкті
Номер патенту: 75913
Опубліковано: 15.06.2006
Автори: Бурачек Всеволод Германович, Шульц Роман Вікторович, Суковенко Оксана Володимирівна, Крельштейн Петро Давидович
МПК: G01C 19/00
Мітки: об'єкти, рухомому, спосіб, визначення, вертикалі
Формула / Реферат:
1. Спосіб визначення вертикалі на рухомому об'єкті, заснований на властивості рідинного рівня з повітряною бульбашкою індексувати горизонтальне положення основи рівня та властивості гіроскопічного датчика зберігати незмінним положення осі гіроскопа у просторі, який відрізняється тим, що під час руху об'єкта вимірюють зміну положення бульбашки рідинного рівня оптико-електронним способом, одночасно вимірюють зміну положення корпусу...
Спосіб керування по тангажу і рисканню
Номер патенту: 67704
Опубліковано: 25.04.2008
Автори: Коростельов Олег Петрович, Яковенко Петро Олексійович, Кузьмін В'ячеслав Павлович, Максимов Сергій Володимирович, Коробов Віталій Ілліч, Косовенко Євген Вікторович, Яковлев Віталій Васильович, Доценко Борис Іванович, Немчин Олександр Федорович, Семенов Леонід Антонович
Мітки: керування, рисканню, тангажу, спосіб
Формула / Реферат:
1. Спосіб керування по тангажу і рисканню, в якому примусово обертають літальний апарат (ЛА) відносно поздовжньої осі з постійною на більшій частині траєкторії кутовою швидкістю, сигнал неузгодженості системи наведення перетворюють в сигнали керування, що надходять на виконавчі слідкуючі рульові механізми, які за допомогою перетворювача узгоджують із кінематичними параметрами руху ЛА відносно цієї осі, який відрізняється тим, що як датчик...
Маятниковий ухиломір

Номер патенту: 31001
Опубліковано: 15.12.2000
Автори: Гурко Олександр Генадійович, Богатиренко Костянтин Іванович
МПК: G01C 9/00
Мітки: ухиломір, маятниковий
Формула / Реферат:
Маятниковий ухиломір, що містить корпус, маятник, поплавець вимірювально-перетворювальний пристрій, який відрізняється тим, що поплавець розміщений в верхній частині корпусу, причому відношення мас вантажу поплавця оберненопропорційне відношенню квадратів довжин їхніх плечей, а об'єм поплавця більший за об'єм вантажу маятника, а вимірювально-перетворювальний пристрій виконаний в вигляді трансформаторного датчика, причому його якір є вантажем...
Пристрій визначення вертикалі на рухливому об`єкті
Номер патенту: 10397
Опубліковано: 15.11.2005
Автори: Бурачек Всеволод Германович, Надточій Олександр Володимирович, Шульц Роман Володимирович, Якунін Олександр Володимирович, Крельштейн Петро Давидович
МПК: G02B 13/08
Мітки: вертикалі, рухливому, пристрій, об'єкти, визначення
Формула / Реферат:
Пристрій визначення вертикалі на рухливому об'єкті, що містить рідинний рівень з повітряною бульбашкою, гіроскопічний блок та блок управління, який відрізняється тим, що в ньому рідинний рівень з повітряною бульбашкою та гіроскопічний блок закріплені в єдиному корпусі, при цьому пристрій містить оптико-електронний блок вимірювання положення бульбашки рівня, датчик вимірювання положення осі гіроскопа, блок обробки інформації; при цьому виходи...
Маятниковий креномір-сигналізатор
Номер патенту: 83140
Опубліковано: 10.06.2008
Автори: Гнатюк Олег Анатолійович, Лехман Степан Дмитрович
МПК: G01C 9/00
Мітки: маятниковий, креномір-сигналізатор
Формула / Реферат:
Маятниковий креномір-сигналізатор, що містить покажчик та гравітаційно чутливий елемент у вигляді датчика-маятника, розміщеного у циліндричному нерухомому корпусі, герметично закритому з обох боків кришками, який відрізняється тим, що в визначених отворах корпусу розташовані одинадцять керованих герметичних контактів, а в камері корпусу, заповненій демпфуючою незамерзаючою рідиною, жорстко закріплений на горизонтальній осі обертання...
Попередній патент: Спосіб корекції синдрому хронічної втоми
Наступний патент: Молольне тіло
Випадковий патент: Орієнтир для стоматологічного інструменту