Спосіб зборки автономного головного блока і стикування його з ракетою-носієм
Номер патенту: 57536
Опубліковано: 10.03.2011
Автори: Воротніков Віталій Анатольйович, Авдеев Анатолій Олексійович, Лепескин Ігор Борисович, Шаповалова Галина Микитівна, Грибок Михаїл Петрович, Кулігін Анатолій Михайлович, Козюля Олена Анатоліївна
Формула / Реферат
Спосіб зборки автономного головного блока і стикування його з ракетою-носієм, який включає установку перехідника у вертикальному положенні нижнім шпангоутом на платформу кантувача, потім установку космічного апарата на перехідник, розворот їх у горизонтальне положення і накочування головного обтічника на космічний апарат з перехідником, який відрізняється тим, що обтічник встановлюють контактними площадками на опорні пояси рухомого маніпуляційного стенда, накочують і стикують з нижнім шпангоутом перехідника, потім відстиковують зібраний автономний головний блок від платформи кантувача, рухомим маніпуляційним стендом доставляють головний блок до ракети-носія і стикують його нижнім шпангоутом перехідника до верхнього шпангоута ракети-носія, при цьому в процесі стикування усувають відхилення взаємного положення напрямних елементів шпангоутів, що стикуються, переміщенням головного блока вузлами кутового і прямолінійного зрушення рухливого маніпуляційного стенда.
Текст
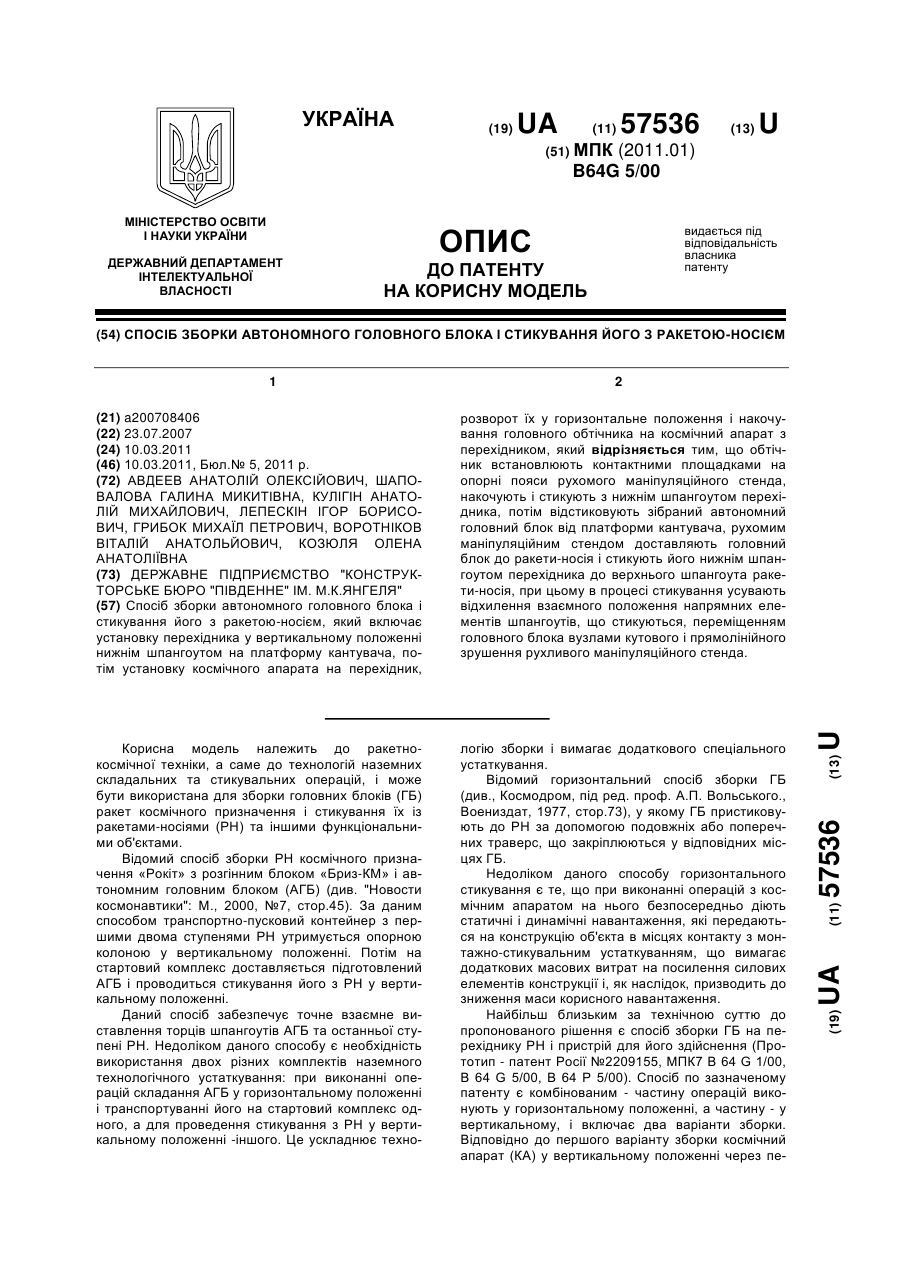
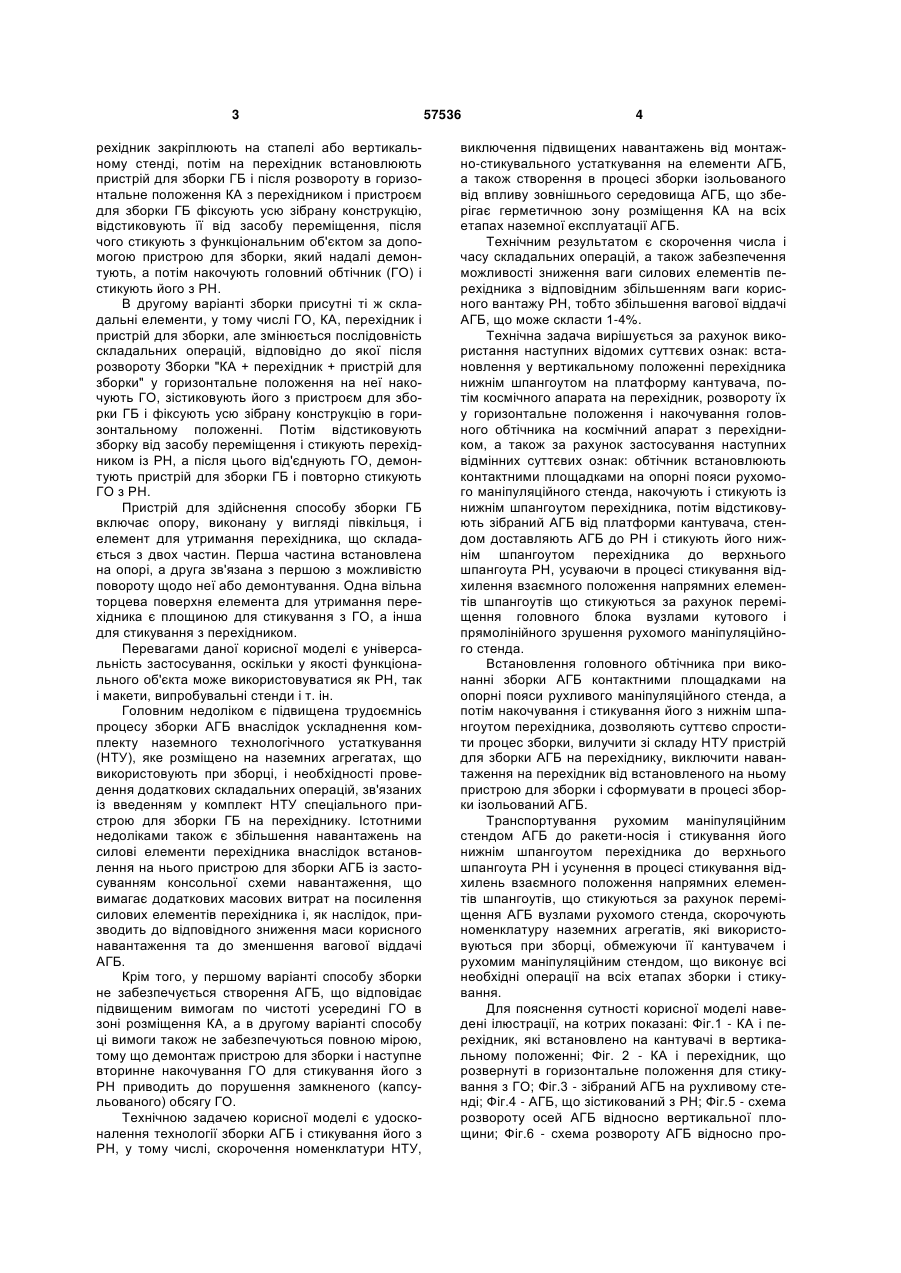
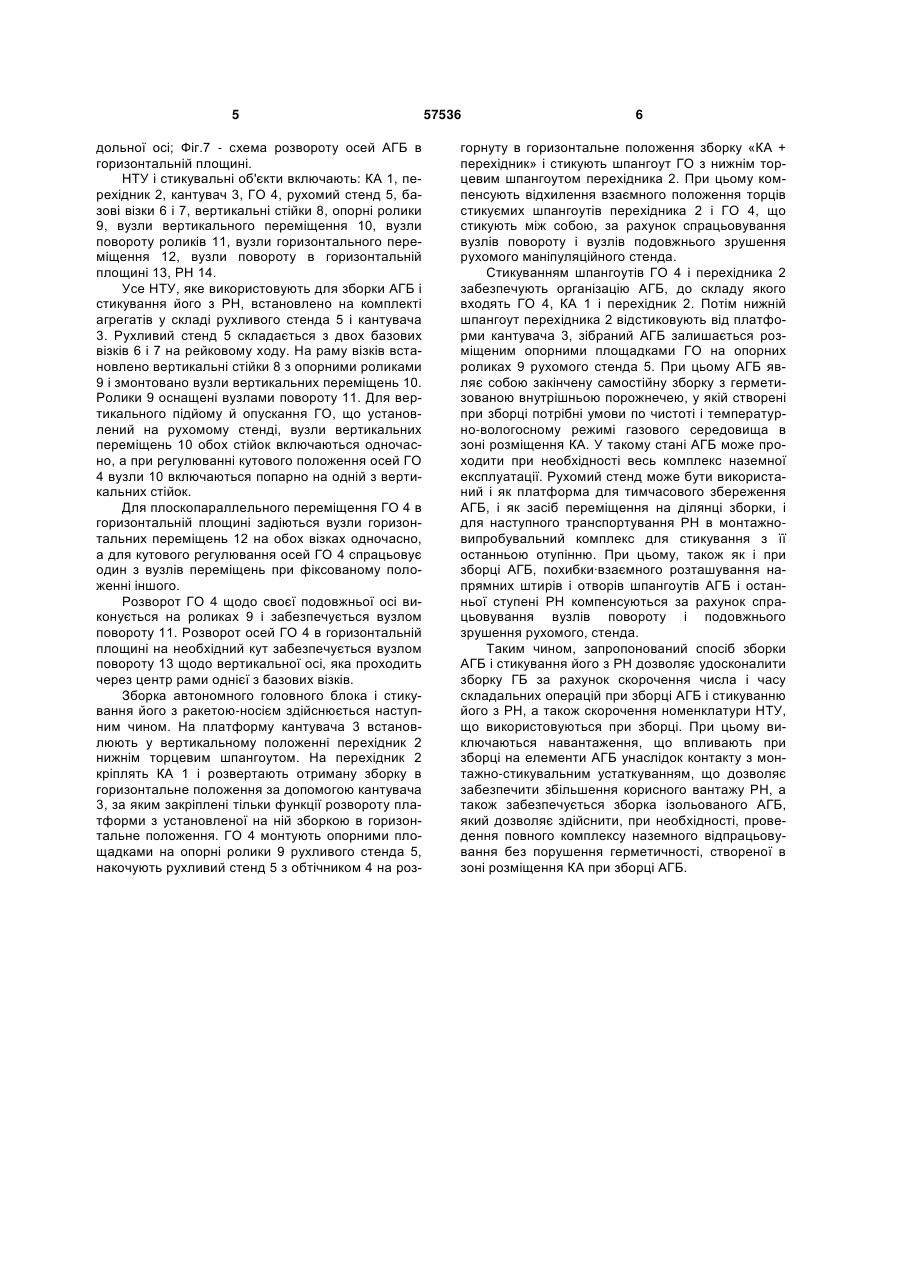
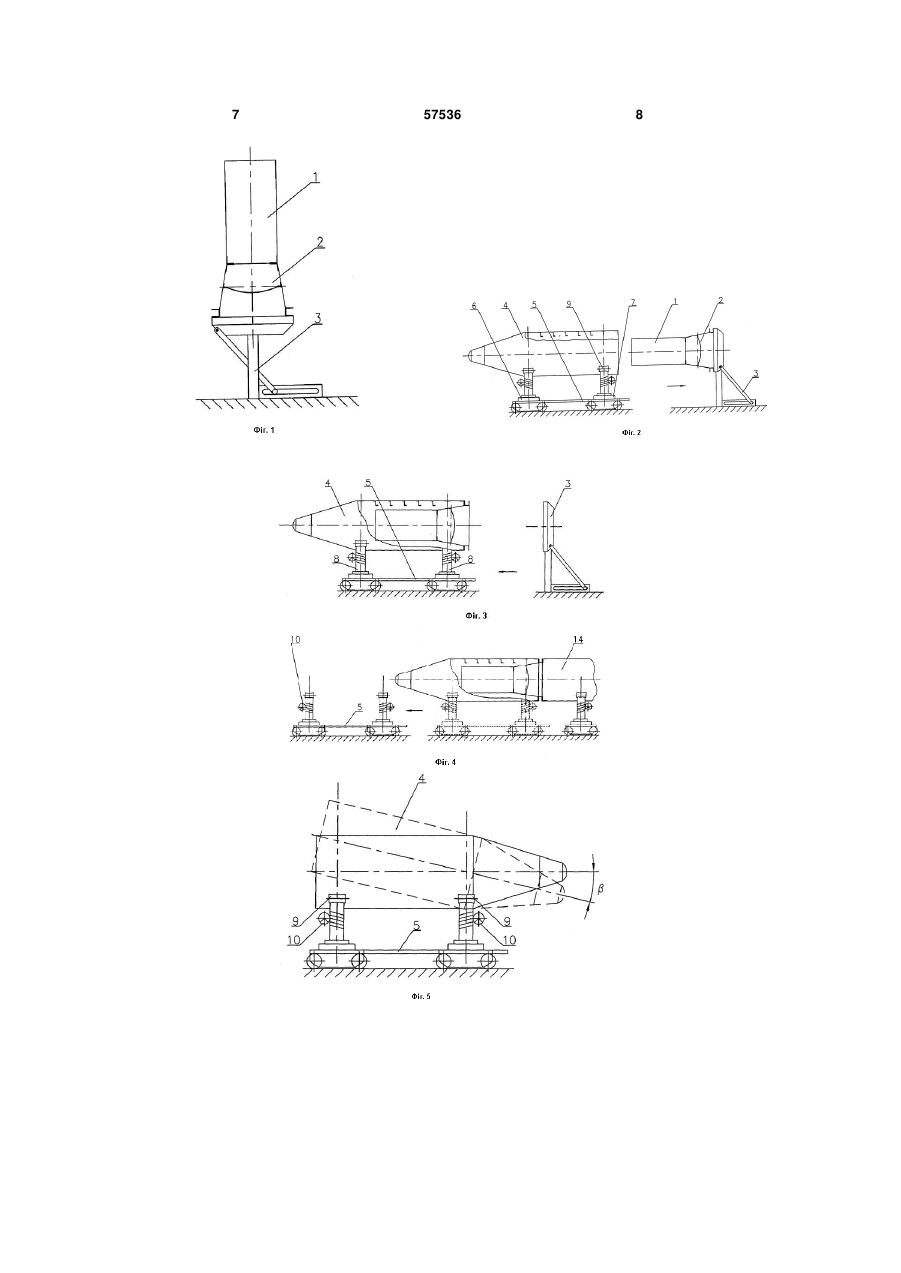
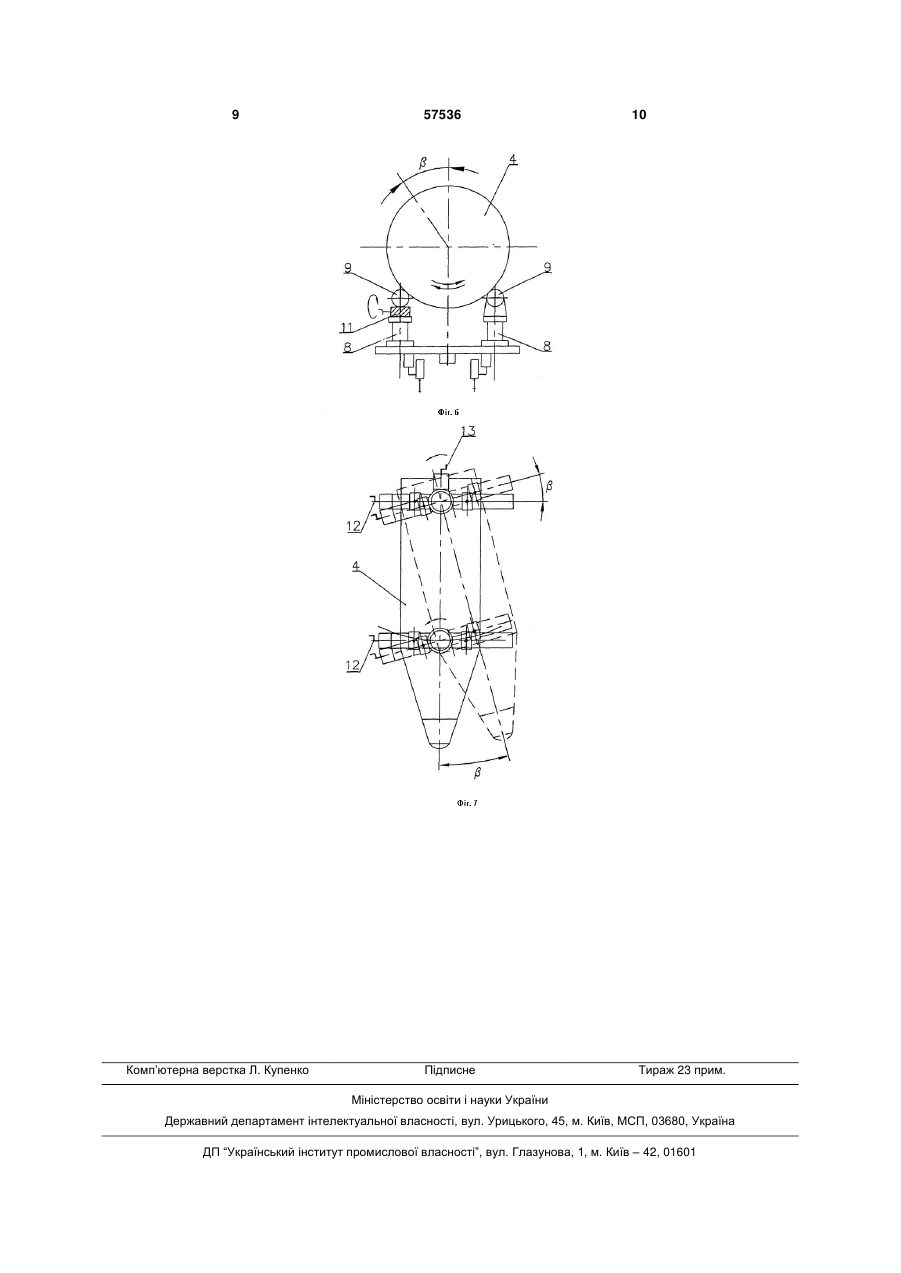
Спосіб зборки автономного головного блока і стикування його з ракетою-носієм, який включає установку перехідника у вертикальному положенні нижнім шпангоутом на платформу кантувача, потім установку космічного апарата на перехідник, 3 рехідник закріплюють на стапелі або вертикальному стенді, потім на перехідник встановлюють пристрій для зборки ГБ і після розвороту в горизонтальне положення КА з перехідником і пристроєм для зборки ГБ фіксують усю зібрану конструкцію, відстиковують її від засобу переміщення, після чого стикують з функціональним об'єктом за допомогою пристрою для зборки, який надалі демонтують, а потім накочують головний обтічник (ГО) і стикують його з РН. В другому варіанті зборки присутні ті ж складальні елементи, у тому числі ГО, КА, перехідник і пристрій для зборки, але змінюється послідовність складальних операцій, відповідно до якої після розвороту Зборки "КА + перехідник + пристрій для зборки" у горизонтальне положення на неї накочують ГО, зістиковують його з пристроєм для зборки ГБ і фіксують усю зібрану конструкцію в горизонтальному положенні. Потім відстиковують зборку від засобу переміщення і стикують перехідником із РН, а після цього від'єднують ГО, демонтують пристрій для зборки ГБ і повторно стикують ГО з РН. Пристрій для здійснення способу зборки ГБ включає опору, виконану у вигляді півкільця, і елемент для утримання перехідника, що складається з двох частин. Перша частина встановлена на опорі, а друга зв'язана з першою з можливістю повороту щодо неї або демонтування. Одна вільна торцева поверхня елемента для утримання перехідника є площиною для стикування з ГО, а інша для стикування з перехідником. Перевагами даної корисної моделі є універсальність застосування, оскільки у якості функціонального об'єкта може використовуватися як РН, так і макети, випробувальні стенди і т. ін. Головним недоліком є підвищена трудоємнісь процесу зборки АГБ внаслідок ускладнення комплекту наземного технологічного устаткування (НТУ), яке розміщено на наземних агрегатах, що використовують при зборці, і необхідності проведення додаткових складальних операцій, зв'язаних із введенням у комплект НТУ спеціального пристрою для зборки ГБ на перехіднику. Істотними недоліками також є збільшення навантажень на силові елементи перехідника внаслідок встановлення на нього пристрою для зборки АГБ із застосуванням консольної схеми навантаження, що вимагає додаткових масових витрат на посилення силових елементів перехідника і, як наслідок, призводить до відповідного зниження маси корисного навантаження та до зменшення вагової віддачі АГБ. Крім того, у першому варіанті способу зборки не забезпечується створення АГБ, що відповідає підвищеним вимогам по чистоті усередині ГО в зоні розміщення КА, а в другому варіанті способу ці вимоги також не забезпечуються повною мірою, тому що демонтаж пристрою для зборки і наступне вторинне накочування ГО для стикування його з РН приводить до порушення замкненого (капсульованого) обсягу ГО. Технічною задачею корисної моделі є удосконалення технології зборки АГБ і стикування його з РН, у тому числі, скорочення номенклатури НТУ, 57536 4 виключення підвищених навантажень від монтажно-стикувального устаткування на елементи АГБ, а також створення в процесі зборки ізольованого від впливу зовнішнього середовища АГБ, що зберігає герметичною зону розміщення КА на всіх етапах наземної експлуатації АГБ. Технічним результатом є скорочення числа і часу складальних операцій, а також забезпечення можливості зниження ваги силових елементів перехідника з відповідним збільшенням ваги корисного вантажу РН, тобто збільшення вагової віддачі АГБ, що може скласти 1-4%. Технічна задача вирішується за рахунок використання наступних відомих суттєвих ознак: встановлення у вертикальному положенні перехідника нижнім шпангоутом на платформу кантувача, потім космічного апарата на перехідник, розвороту їх у горизонтальне положення і накочування головного обтічника на космічний апарат з перехідником, а також за рахунок застосування наступних відмінних суттєвих ознак: обтічник встановлюють контактними площадками на опорні пояси рухомого маніпуляційного стенда, накочують і стикують із нижнім шпангоутом перехідника, потім відстиковують зібраний АГБ від платформи кантувача, стендом доставляють АГБ до РН і стикують його нижнім шпангоутом перехідника до верхнього шпангоута РН, усуваючи в процесі стикування відхилення взаємного положення напрямних елементівшпангоутів що стикуються за рахунок переміщення головного блока вузлами кутового і прямолінійного зрушення рухомого маніпуляційного стенда. Встановлення головного обтічника при виконанні зборки АГБ контактними площадками на опорні пояси рухливого маніпуляційного стенда, а потім накочування і стикування його з нижнім шпангоутом перехідника, дозволяють суттєво спростити процес зборки, вилучити зі складу НТУ пристрій для зборки АГБ на перехіднику, виключити навантаження на перехідник від встановленого на ньому пристрою для зборки і сформувати в процесі зборки ізольований АГБ. Транспортування рухомим маніпуляційним стендом АГБ до ракети-носія і стикування його нижнім шпангоутом перехідника до верхнього шпангоута РН і усунення в процесі стикування відхилень взаємного положення напрямних елементів шпангоутів, що стикуються за рахунок переміщення АГБ вузлами рухомого стенда, скорочують номенклатуру наземних агрегатів, які використовуються при зборці, обмежуючи її кантувачем і рухомим маніпуляційним стендом, що виконує всі необхідні операції на всіх етапах зборки і стикування. Для пояснення сутності корисної моделі наведені ілюстрації, на котрих показані: Фіг.1 - КА і перехідник, які встановлено на кантувачі в вертикальному положенні; Фіг. 2 - КА і перехідник, що розвернуті в горизонтальне положення для стикування з ГО; Фіг.3 - зібраний АГБ на рухливому стенді; Фіг.4 - АГБ, що зістикований з РН; Фіг.5 - схема розвороту осей АГБ відносно вертикальної площини; Фіг.6 - схема розвороту АГБ відносно про 5 дольної осі; Фіг.7 - схема розвороту осей АГБ в горизонтальній площині. НТУ і стикувальні об'єкти включають: КА 1, перехідник 2, кантувач 3, ГО 4, рухомий стенд 5, базові візки 6 і 7, вертикальні стійки 8, опорні ролики 9, вузли вертикального переміщення 10, вузли повороту роликів 11, вузли горизонтального переміщення 12, вузли повороту в горизонтальній площині 13, РН 14. Усе НТУ, яке використовують для зборки АГБ і стикування його з РН, встановлено на комплекті агрегатів у складі рухливого стенда 5 і кантувача 3. Рухливий стенд 5 складається з двох базових візків 6 і 7 на рейковому ходу. На раму візків встановлено вертикальні стійки 8 з опорними роликами 9 і змонтовано вузли вертикальних переміщень 10. Ролики 9 оснащені вузлами повороту 11. Для вертикального підйому й опускання ГО, що установлений на рухомому стенді, вузли вертикальних переміщень 10 обох стійок включаються одночасно, а при регулюванні кутового положення осей ГО 4 вузли 10 включаються попарно на одній з вертикальних стійок. Для плоскопараллельного переміщення ГО 4 в горизонтальній площині задіються вузли горизонтальних переміщень 12 на обох візках одночасно, а для кутового регулювання осей ГО 4 спрацьовує один з вузлів переміщень при фіксованому положенні іншого. Розворот ГО 4 щодо своєї подовжньої осі виконується на роликах 9 і забезпечується вузлом повороту 11. Розворот осей ГО 4 в горизонтальній площині на необхідний кут забезпечується вузлом повороту 13 щодо вертикальної осі, яка проходить через центр рами однієї з базових візків. Зборка автономного головного блока і стикування його з ракетою-носієм здійснюється наступним чином. На платформу кантувача 3 встановлюють у вертикальному положенні перехідник 2 нижнім торцевим шпангоутом. На перехідник 2 кріплять КА 1 і розвертають отриману зборку в горизонтальне положення за допомогою кантувача 3, за яким закріплені тільки функції розвороту платформи з установленої на ній зборкою в горизонтальне положення. ГО 4 монтують опорними площадками на опорні ролики 9 рухливого стенда 5, накочують рухливий стенд 5 з обтічником 4 на роз 57536 6 горнуту в горизонтальне положення зборку «КА + перехідник» і стикують шпангоут ГО з нижнім торцевим шпангоутом перехідника 2. При цьому компенсують відхилення взаємного положення торців стикуємих шпангоутів перехідника 2 і ГО 4, що стикують між собою, за рахунок спрацьовування вузлів повороту і вузлів подовжнього зрушення рухомого маніпуляційного стенда. Стикуванням шпангоутів ГО 4 і перехідника 2 забезпечують організацію АГБ, до складу якого входять ГО 4, КА 1 і перехідник 2. Потім нижній шпангоут перехідника 2 відстиковують від платформи кантувача 3, зібраний АГБ залишається розміщеним опорними площадками ГО на опорних роликах 9 рухомого стенда 5. При цьому АГБ являє собою закінчену самостійну зборку з герметизованою внутрішньою порожнечею, у якій створені при зборці потрібні умови по чистоті і температурно-вологосному режимі газового середовища в зоні розміщення КА. У такому стані АГБ може проходити при необхідності весь комплекс наземної експлуатації. Рухомий стенд може бути використаний і як платформа для тимчасового збереження АГБ, і як засіб переміщення на ділянці зборки, і для наступного транспортування РН в монтажновипробувальний комплекс для стикування з її останньою отупінню. При цьому, також як і при зборці АГБ, похибки·взаємного розташування напрямних штирів і отворів шпангоутів АГБ і останньої ступені РН компенсуються за рахунок спрацьовування вузлів повороту і подовжнього зрушення рухомого, стенда. Таким чином, запропонований спосіб зборки АГБ і стикування його з РН дозволяє удосконалити зборку ГБ за рахунок скорочення числа і часу складальних операцій при зборці АГБ і стикуванню його з РН, а також скорочення номенклатури НТУ, що використовуються при зборці. При цьому виключаються навантаження, що впливають при зборці на елементи АГБ унаслідок контакту з монтажно-стикувальним устаткуванням, що дозволяє забезпечити збільшення корисного вантажу РН, а також забезпечується зборка ізольованого АГБ, який дозволяє здійснити, при необхідності, проведення повного комплексу наземного відпрацьовування без порушення герметичності, створеної в зоні розміщення КА при зборці АГБ. 7 57536 8 9 Комп’ютерна верстка Л. Купенко 57536 Підписне 10 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for assembly of autonomous main block and its docking with carrier rocket
Автори англійськоюAvdeev Anatolii Oleksiiovych, Shapovalova Halyna Mykytivna, Kulihin Anatolii Mykhailovych, Lepeskin Ihor Borysovych, Hrybok Mykhail Petrovych, Vorotnikov Vitalii Anatoliiovych, Koziulia Olena Anatoliivna
Назва патенту російськоюСпособ сборки автономного основного блока и стыковка его c ракетой-носителем
Автори російськоюАвдеев Анатолий Алексеевич, Шаповалова Галина Никитична, Кулигин Анатолий Михайлович, Лепескин Игорь Борисович, Грибок Михаил Петрович, Воротников Виталий Анатольевич, Козюля Елена Анатольевна
МПК / Мітки
МПК: B64G 5/00
Мітки: спосіб, блока, стикування, автономного, головного, ракетою-носієм, зборки
Код посилання
<a href="https://ua.patents.su/5-57536-sposib-zborki-avtonomnogo-golovnogo-bloka-i-stikuvannya-jjogo-z-raketoyu-nosiehm.html" target="_blank" rel="follow" title="База патентів України">Спосіб зборки автономного головного блока і стикування його з ракетою-носієм</a>
Спосіб збирання розгінного блока з ракетою-носієм і головним блоком
Номер патенту: 83246
Опубліковано: 25.06.2008
Автори: Аксьоненко Олександр Володимирович, Дудинський Олександр Анатолійович, Бурлака Юрій Данилович, Усатов Олексій Павлович, Мороз Анатолій Гаврилович
МПК: F42B 15/36, B64G 1/00
Мітки: спосіб, головним, збирання, розгінного, блока, ракетою-носієм, блоком
Формула / Реферат:
Спосіб збирання розгінного блока з ракетою-носієм і головним блоком, за яким до ракети-носія пристиковують розгінний блок і головний блок, що складається з корисного вантажу, адаптера, перехідника й головного обтічника, причому розгінний блок і ракету-носій попередньо оснащують автономними системами керування й прицілювання, що вимагають визначення величини взаємної азимутальної неузгодженості контрольних елементів ракети-носія й розгінного...
Монтажний возик для стикування ракетного блока

Номер патенту: 9446
Опубліковано: 15.09.2005
Автори: Калюжний Віктор Олексійович, Свириденко Едуард Матвійович, Мокін Андрій Олександрович, Мокін Олександр Васильович, Подзолков Віктор Іванович, Черняєв В'ячеслав Миколайович
Мітки: ракетного, монтажний, блока, возик, стикування
Формула / Реферат:
1. Монтажний возик для стикування ракетного блока, що містить основу і поперечну балку з пружинними стояками, на яких закріплений бандаж, що складається з ложемента й захвату, який відрізняється тим, що пружинні стояки оснащені співвісними гвинтовими приводами і закріплені через поперечну вісь на кінцях поперечної балки з можливістю повороту і стопоріння у поздовжній вертикальній площині, при цьому один з пружинних стояків закріплений на...
Пристрій для транспортування і стикування розгінного блока до ракети-носія
Номер патенту: 13022
Опубліковано: 15.03.2006
Автори: Зубинський Сергій Ярославович, Чивкін Сергій Іванович, Куляба Олександр Миколайович, Мокін Андрій Олександрович, Мокін Олександр Васильович, Терещенко Олександр Дмитрович
МПК: F42B 15/00, B64G 5/00
Мітки: розгінного, транспортування, блока, стикування, ракети-носія, пристрій
Формула / Реферат:
1. Пристрій для транспортування і стикування розгінного блока до ракети-носія, що містить переднє і заднє технологічні кільця, котрі змонтовані відповідно на зовнішніх торцях поверхонь фланців переднього і заднього шпангоутів розгінного блока за допомогою вузлів кріплення і котрі спираються на ложементи, який відрізняється тим, що він оснащений жорстким півкільцем, змонтованим на протилежній торцевій поверхні фланця заднього шпангоута за...
Головка тепловидільної зборки з високим поглинанням енергії для тепловидільної зборки з ядерним паливом
Номер патенту: 81955
Опубліковано: 25.02.2008
Автори: Алешин Юрій, Сліптцов Алєксєй, Спарров Джеймс А.
Мітки: ядерним, головка, енергії, високим, паливом, поглинанням, зборки, тепловидільної
Формула / Реферат:
1. Головка тепловидільної зборки з високим поглинанням енергії для тепловидільної зборки з ядерним паливом, що має телескопічні опори, які принаймні частково проходять через неї, з ковзно встановленими регулювальними стрижнями, закріпленими на зборці регулювальних стрижнів, яка містить трубчастий корпус, що має перший кінець та другий кінець і притискну плиту, закріплену по колу на внутрішній стінці трубчастого корпусу в проміжному положенні...
Спосіб стикування кочової пасіки з шасі-причепом і пристрій для його здійснення
Номер патенту: 82376
Опубліковано: 10.04.2008
Автори: Головко Сергій Миколайович, Луцкевич Віталій Васильович, Желтобрюх Віктор Миколайович
МПК: B60P 1/44
Мітки: пристрій, шасі-причепом, кочової, стикування, спосіб, здійснення, пасіки
Формула / Реферат:
1. Спосіб стикування кочової пасіки з шасі-причепом, що включає підняття платформи пасіки з вуликами над шасі-причепом підйомними пристроями, змонтованими на платформі, закочування і подачу пристроєм для стикування шасі-причепа заднім ходом під платформу і закріплення її на шасі-причепі, який відрізняється тим, що перед закріпленням платформи на шасі-причепі шасі-причіп одночасно з подачею під платформу, пристроєм для стикування, підтягають...
Попередній патент: Фармацевтична композиція для здолання опосередкованої бета-лактамазою резистентності до антибіотиків
Наступний патент: Універсальний газоповітряний нагрівач з примусовою циркуляцією повітря як теплоносія
Випадковий патент: Спосіб оцінки ефективності лікування хворих на ішемічну хворобу серця з стенокардією та артеріальною гіпертензією карведілолом