Спосіб виміру радіальних швидкостей цілей
Номер патенту: 57660
Опубліковано: 16.06.2003
Автори: Головін Олексій Олександрович, Слюсар Вадим Іванович
Формула / Реферат
1. Спосіб виміру радіальних швидкостей цілей, що полягає в періодичному випроміненні імпульсних сигналів, здійсненні над прийнятими луна-сигналами операції аналого-цифрового перетворення (АЦП), формуванні вимірювальної вибірки шляхом багаторазового відбору однойменних відліків цифрових напруг сигналів, отриманих у різні періоди випромінення, здійсненні для виміру швидкості цілі зваженого підсумовування в межах сформованої зазначеним чином вимірювальної вибірки однойменних відліків сигналів, отриманих у різні періоди випромінення, який відрізняється тим, що визначення швидкості цілі проводять шляхом виміру періодичного зсуву у часі сигналів в сформованій вимірювальній вибірці, який виникає протягом N зондувань внаслідок руху цілі.
2. Спосіб за п. 1, який відрізняється тим, що визначення швидкості цілі здійснюють за виразом:
![]() ,
,
де: Τ - період повторення зондувальних імпульсів, с - швидкість світла, d - періодичний зсув у часі сигналів в сформованій вимірювальній вибірці внаслідок руху цілі, оцінений в періодах дискретизації АЦП, ![]() t -період дискретизації АЦП.
t -період дискретизації АЦП.
3. Спосіб за пп. 1, 2, який відрізняється тим, що операції АЦП луна-сигналів передує їх амплітудне детектування.
4. Спосіб за пп. 1, 2, який відрізняється тим, що після операції АЦП луна-сигналів здійснюють їх цифрове детектування, наприклад, шляхом відкидання знакового розряду.
5. Спосіб за пп. 3, 4, який відрізняється тим, що зважене підсумовування однойменних відліків сигналів, отриманих у різні періоди випромінення, здійснюють за виразом:
 ,
,
де: Ν - кількість імпульсів у вибірці, S - протяжність вимірювальної вибірки у відліках АЦП, s - номер відліку АЦП, n - номер імпульсу, Usn -напруга sn-го відліку АЦП, d - величина періодичного зсуву у часі сигналів в сформованій вимірювальній вибірці протягом N зондувань внаслідок руху цілі,

- нормована до свого максимуму дискретна функція обвідної n-го
імпульсу в s-м за номером відлікові вимірювальної вибірки,
Μ - тривалість імпульсів у періодах дискретизації АЦП,
z - зсув першого з задіяних для виміру відліків АЦП відносно останнього імпульсу в пачці,
при цьому оцінку величини періодичного зсуву d здійснюють шляхом перебору можливих значень z та d з заданим кроком до досягнення функцією F максимума максиморум.
6. Спосіб за пп. 1, 2, який відрізняється тим, що операції аналого-цифрового перетворення луна-сигналів передує формування квадратурних складових сигналів шляхом аналогового перемноження прийнятого сигналу та опірного.
7. Спосіб за пп. 1, 2, який відрізняється тим, що після аналого-цифрового перетворення луна-сигналів формують їх квадратурні складові у цифровому вигляді.
8. Спосіб за п. 7, який відрізняється тим, що формування квадратурних складових сигналів здійснюють за допомогою дискретного перетворення Гільберта у режимі ковзаючого вікна над заданою кількістю відліків, яка залежить від порядку фільтра Гільберта.
9. Спосіб за пп. 6-8, який відрізняється тим, що зважене підсумовування однойменних відліків сигналів, отриманих у різні періоди випромінення, здійснюють за виразом:
 ,
,
де Ν - кількість імпульсів у вибірці, S - протяжність вимірювальної вибірки у відліках АЦП, s - номер відліку АЦП, n - номер імпульсу, ![]() ,
, ![]() - квадратурні складові напруги sn-го відліку АЦП, d - величина періодичного зсуву у часі сигналів в сформованій вимірювальній вибірці протягом N зондувань внаслідок руху цілі,
- квадратурні складові напруги sn-го відліку АЦП, d - величина періодичного зсуву у часі сигналів в сформованій вимірювальній вибірці протягом N зондувань внаслідок руху цілі,

- нормована до свого максимуму дискретна функція обвідної n-го імпульсу в s-м за номером відліку вимірювальної вибірки,
Μ - тривалість імпульсів у періодах дискретизації АЦП,
z - зсув першого з задіяних для виміру відліків АЦП відносно останнього імпульсу в пачці,
при цьому оцінку величини періодичного зсуву d здійснюють шляхом перебору можливих значень z та d з заданим кроком до досягнення функцією FM максимуму максиморум.
Текст
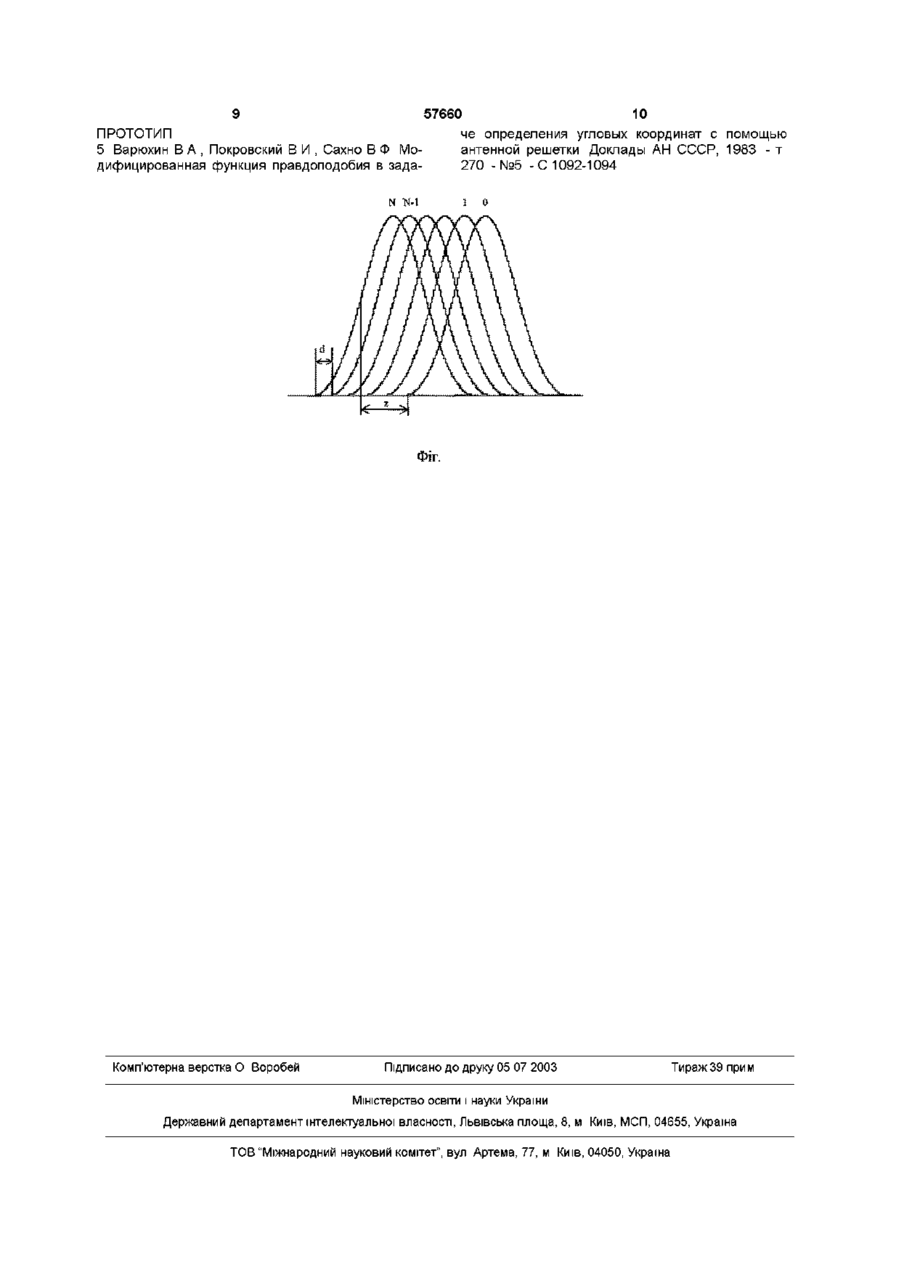
1 Спосіб виміру радіальних швидкостей цілей, що полягає в періодичному випромшенні імпульсних сигналів, здійсненні над прийнятими луна-сигналами операції аналого-цифрового перетворення (АЦП), формуванні вимірювальної вибірки шляхом багаторазового відбору однойменних ВІДЛІКІВ цифрових напруг сигналів, отриманих у різні періоди випромшення, здійсненні для виміру швидкості ЦІЛІ зваженого підсумовування в межах сформованої зазначеним чином вимірювальної вибірки однойменних ВІДЛІКІВ сигналів, отриманих у різні періоди випромшення, який відрізняється тим, що визначення швидкості ЦІЛІ проводять шляхом виміру періодичного зсуву у часі сигналів в сформованій вимірювальній вибірці, який виникає протягом N зондувань внаслідок руху ЦІЛІ 2 Спосіб за п 1, який відрізняється тим, що визначення швидкості ЦІЛІ здійснюють за виразом d • At • с v = 2T де Т - період повторення зондувальних імпульсів, с - швидкість світла, d - періодичний зсув у часі сигналів в сформованій вимірювальній вибірці внаслідок руху ЦІЛІ, оцінений в періодах дискретизації АЦП, Д t -період дискретизації АЦП 3 Спосіб за пп 1, 2, який відрізняється тим, що операції АЦП луна-сигналів передує їх амплітудне детектування 4 Спосіб за пп 1, 2, який відрізняється тим, що після операції АЦП луна-сигналів здійснюють їх цифрове детектування, наприклад, шляхом відкидання знакового розряду 5 Спосіб за пп 3, 4, який відрізняється тим, що зважене підсумовування однойменних ВІДЛІКІВ сигналів, отриманих у різні періоди випромшення, здійснюють за виразом S-1N-1 i 2 s=0n=0 S-1N-1 s=0n=0 де N - КІЛЬКІСТЬ імпульсів у вибірці, S - протяжність вимірювальної вибірки у відліках АЦП, s - номер відліку АЦП, п - номер імпульсу, U sn -напруга sn-ro відліку АЦП, d - величина періодичного зсуву у часі сигналів в сформованій вимірювальній вибірці протягом N зондувань внаслідок руху ЦІЛІ, [k(s+ z-n-d), при n-dM + n-d - нормована до свого максимуму дискретна функція обвідної п-го імпульсу в s-м за номером ВІДЛІКОВІ вимірювальної вибірки, М - тривалість імпульсів у періодах дискретизації АЦП, z - зсув першого з задіяних для виміру ВІДЛІКІВ АЦП відносно останнього імпульсу в пачці, при цьому оцінку величини періодичного зсуву d здійснюють шляхом перебору можливих значень z та d з заданим кроком до досягнення функцією F максимума максиморум 6 Спосіб за пп 1, 2, який відрізняється тим, що операції аналого-цифрового перетворення лунасигналів передує формування квадратурних складових сигналів шляхом аналогового перемноження прийнятого сигналу та опірного 7 Спосіб за пп 1, 2, який відрізняється тим, що після аналого-цифрового перетворення лунасигналів формують їх квадратурні складові у цифровому вигляді 8 Спосіб за п 7, який відрізняється тим, що формування квадратурних складових сигналів здійснюють за допомогою дискретного перетворення Гільберта у режимі ковзаючого вікна над заданою КІЛЬКІСТЮ ВІДЛІКІВ, яка залежить від порядку фільт ра Гільберта 9 Спосіб за пп 6-8, який відрізняється тим, що зважене підсумовування однойменних ВІДЛІКІВ сигналів, отриманих у різні періоди випромшення, здійснюють за виразом О (О (О ю 57660 ( z-nd) ; z-nd) (s + z-nd) де N - КІЛЬКІСТЬ імпульсів у вибірці, S - протяжність вимірювальної вибірки у відліках АЦП, s - номер Q відліку АЦП, п - номер імпульсу, \J sn , U j n - квадратурні складові напруги sn-ro відліку АЦП, d - величина періодичного зсуву у часі сигналів в сформованій вимірювальній вибірці протягом N зондувань внаслідок руху ЦІЛІ, Винахід відноситься до галузі радіолокації і може бути застосований для виміру швидкості цілей при некогерентних зондуючих сигналах Відома значна КІЛЬКІСТЬ способів виміру радіальних швидкостей цілей, що спираються на одержання оцінки доплеровського зсуву частоти лунасигналів в багатоканальному вимірювачі Зокрема, сутність способу [1] полягає в застосуванні М частотних каналів з узгодженими фільтрами, частотне рознесення між якими вибирають, виходячи із заданої розрізнювальної здатності зондувального сигналу по доплеровській частоті Оцінку частоти Доплера грубо роблять по номеру каналу (фільтра) з максимальною амплітудою вихідної напруги Для підвищення точності оцінювання використовують напругу на виходах трьох і більше частотних каналів, причому оцінку частоти фіксують по максимуму огинаючої вихідних напруг обраних частотних каналів Недоліком даного способу є необхідність встановлення чималої КІЛЬКОСТІ фільтрів і детекторів огинаючої, що збільшує габарити апаратури, а також обмеженість точності виміру Відомий спосіб виміру радіальної швидкості за допомогою відслідковуючого вимірювача дальності [2] Сутність даного способу полягає у вимірі дальності, що змінюється в часі, шляхом зняття сигналу неузгодженості з дискримінатора та подальшого його диференціювання Недоліком даного способу є низька точність виміру при значних прискореннях цілей та зривах автоматичного супроводження цілей по дальності Відомий спосіб виміру швидкості цілей "недоплеровським методом" [3] Сутність способу полягає у випромінюванні двох коротких імпульсів у різні моменти часу і визначенні дальності до ЦІЛІ di при першому зондуванні та D2 - при другому З урахуванням відомого часу між посилками імпульсів Т, радіальну швидкість ЦІЛІ знаходять за формулою v ^ 0 ^ О) Однак, забезпечення високої точності виміру швидкості даним способом пов'язане з необхідніс -n d) = k '(s + z-n d), при n d M + n d - нормована до свого максимуму дискретна функція обвідної п-го імпульсу в s-м за номером відліку вимірювальної вибірки, М - тривалість імпульсів у періодах дискретизації АЦП, z - зсув першого з задіяних для виміру ВІДЛІКІВ АЦП відносно останнього імпульсу в пачці, при цьому оцінку величини періодичного зсуву d здійснюють шляхом перебору можливих значень z та d з заданим кроком до досягнення функцією FM максимуму максиморум тю досягнення значного відношення сигнал-шум у кожному з зондувань Серед відомих способів виміру швидкості цілей найбільш близьким за своєю сутністю до винаходу, що заявляється, є цифровий спосіб виміру швидкості шляхом оцінки регулярного доплеровського зсуву частоти відбитих сигналів [4] Сутність операцій способу-прототипу полягає в періодичному випромшені імпульсних сигналів, здійсненні над прийнятими луна-сигналами операції аналого-цифрового перетворення, формуванні вимірювальної вибірки шляхом багаторазового відбору однойменних ВІДЛІКІВ цифрових напруг сигналів, отриманих у різні періоди випромшення, здійсненні для виміру швидкості ЦІЛІ зваженого підсумовування в межах сформованої зазначеним чином вимірювальної вибірки однойменних ВІДДІЛКІВ сигналів, отриманих у різні періоди випромінення, причому зважене підсумовування виконується за допомогою дискретного перетворення Фур'є (ДПФ) з подальшим вибором частотних каналів, в яких амплітуда сигналу перевищила поріг виявлення, та оцінкою по ним доплеровського зсуву частоти за методом максимальної правдоподібності Зазначений спосіб-прототип дозволяє істотно підвищити точність виміру швидкості Однак, спосіб-прототип потребує високої когерентності сигналів і втрачає свою точність при великих швидкостях цілей за умов тривалого накопичення сигналів З урахуванням сказаного, технічне завдання, що вирішується заявленим винаходом, полягає в підвищенні точності виміру швидкості цілей шляхом застосування цифрового методу виміру періодичного зсуву у часі сигналів, який виникає внаслідок руху ЦІЛІ на протязі багатьох зондувань Сутність заявленого винаходу полягає в періодичному випроміненні імпульсних сигналів, здійсненні над прийнятими луна-сигналами операції аналого-цифрового перетворення, формуванні вимірювальної вибірки шляхом багаторазового відбору однойменних ВІДЛІКІВ цифрових напруг сигналів, отриманих у різні періоди випромшення, здійсненні для виміру швидкості ЦІЛІ зваженого підсумовування в межах сформованої зазначеним 57660 з заданим кроком до досягнення функцією F (3) максимуму максиморум Слід звернути увагу, що в заявленому способі зважене підсумовування однойменних ВІДЛІКІВ сигналів, отриманих у різні періоди випромінювання, виконують за аналогією із синтезом нульового частотного фільтра в процедурі швидкого перетводок руху ЦІЛІ рення Фур'є, передбаченої способом - прототипом (фіг), де d - періодичний зсув у часі сигналів в Визначення швидкості ЦІЛІ може здійснювасформованій вимірювальній вибірці внаслідок руху тись за виразом ЦІЛІ, оцінений в періодах дискретизації АЦП z V=^ ^ (2) зсув першого з задіяних для виміру ВІДЛІКІВ АЦП У 2Т ' відносно останнього імпульсу в пачці де Т - період повторення зондувальних імпуПри цьому задаються ЛІНІЙНОЮ моделлю руху льсів, с - швидкість світла, d - періодичний зсув у ЦІЛІ в межах інтервалу спостереження Швидкість часі сигналів в сформованій вимірювальній вибірці ЦІЛІ вважають постійною Фактори, що впливають внаслідок руху ЦІЛІ, оцінений в періодах дискретина рух ЦІЛІ, такі як тип ЦІЛІ, МОЖЛИВОСТІ маневрузації АЦП, At - період дискретизації АЦП вання, точність керування, неоднорідність середоПодальші варіанти конкретної реалізації заяввища, у якій відбувається політ, не враховують леного способу різняться залежно від особливосПрипускають, що зазначені імпульси мають тей первинної обробки сигналів, зокрема застосуоднакову, описувану аналітичною функцією, відовання для виміру швидкості цілей луна-сигналів у му форму згинаючої, і на інтервалі прийому сигнавигляді відео- чи радіоімпульсів льної пачки період їхнього повторення d залишаТак, один з варіантів заявленого способу може ється незмінним Також вважають, що відрізнятись тим, що операції аналого-цифрового приймальний тракт вносить зневажливо малі неліперетворення луна-сигналів передує їх амплітудне нійні перекручування детектування Інший варіант може передбачати У даній задачі в якості невідомих розглядають виконання після операції аналого-цифрового певеличини d і z Для синтезу процедури їх знахоретворення луна-сигналів їх цифрового детектудження було застосовано метод найменших квадвання, наприклад, шляхом відкидання знакового ратів [5] розряду Відповідна вихідна сума квадратів нев'язань В обох цих випадках, має місце застосування усіх рівнянь системи мала вигляд для виміру швидкості цілей луна-сигналів у вигляді відеоімпульсів Тому подальший варіант операцій S-1N-1 (5) mm над ними відрізняється тим, що зважене підсумоs=0n=0 вування однойменних ВІДЛІКІВ сигналів, отриманих у різні періоди випромінення, здійснюють за вираде а - амплітуда сигналів зом Мінімум F забезпечується при цілком визначній ОЦІНЦІ а Цю оцінку знаходять шляхом диференціювання (5) по зазначеній невідомій і прирівнюванням до нуля II похідної s=0n=0 (3) S-1N-1 S-1N-1 ~ ~\І2 z-nd ~=s=0n=0 sO= = nO (6) S-1N-1 де N - КІЛЬКІСТЬ імпульсів у вибірці, S - протяжність вимірювальної вибірки у відліках АЦП, s s=0n=0 номер відліку АЦП, п - номер імпульсу, U sn - напруДля знаходження оцінок z і d можна перейти га sn-ro відліку АЦП, d - періодичний зсув у часі до модифікованої, згідно [5], функції правдоподібсигналів в сформованій вимірювальній вибірці ності Для цього доданки, що входять у (5) зводять внаслідок руху ЦІЛІ, оцінений в періодах дискретиу квадрат і розкривають дужки зації АЦП, k(s + z - n d), при п (7) ak(s + z - nd) F=ZZ(U3n) -2a££U3r^s + z-ndJ+ , d
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring radial velocity of a target
Автори англійськоюHolovin Oleksii Oleksandrovych, Sliusar Vadym Ivanovych
Назва патенту російськоюСпособ измерения радиальной скорости цели
Автори російськоюГоловин Алексей Александрович, Слюсар Вадим Иванович
МПК / Мітки
Мітки: швидкостей, радіальних, виміру, спосіб, цілей
Код посилання
<a href="https://ua.patents.su/5-57660-sposib-vimiru-radialnikh-shvidkostejj-cilejj.html" target="_blank" rel="follow" title="База патентів України">Спосіб виміру радіальних швидкостей цілей</a>
Цифровий спосіб виміру радіальних швидкостей цілей
Номер патенту: 55289
Опубліковано: 17.03.2003
Автори: Головін Олексій Олександрович, Слюсар Вадим Іванович
МПК: G01S 13/58
Мітки: спосіб, швидкостей, радіальних, виміру, цілей, цифровий
Формула / Реферат:
1. Цифровий спосіб виміру радіальних швидкостей цілей, що полягає в періодичному випроміненні імпульсних сигналів, здійсненні над прийнятими луна-сигналами операції аналого-цифрового перетворення (АЦП), формуванні вимірювальної вибірки шляхом багаторазового відбору однойменних відліків цифрових напруг сигналів, отриманих у різні періоди випромінення, здійсненні для виміру швидкості цілі зваженого підсумовування в межах сформованої зазначеним...
Спосіб визначення малих радіальних швидкостей в когерентних рлс і пристрій для його здійснення
Номер патенту: 54301
Опубліковано: 17.02.2003
Автори: Лізогуб Віталій Васильович, Пуляєв Валерій Олександрович, Рогожкін Євген Васильович
МПК: G01S 13/95
Мітки: когерентних, швидкостей, спосіб, пристрій, рлс, радіальних, малих, визначення, здійснення
Формула / Реферат:
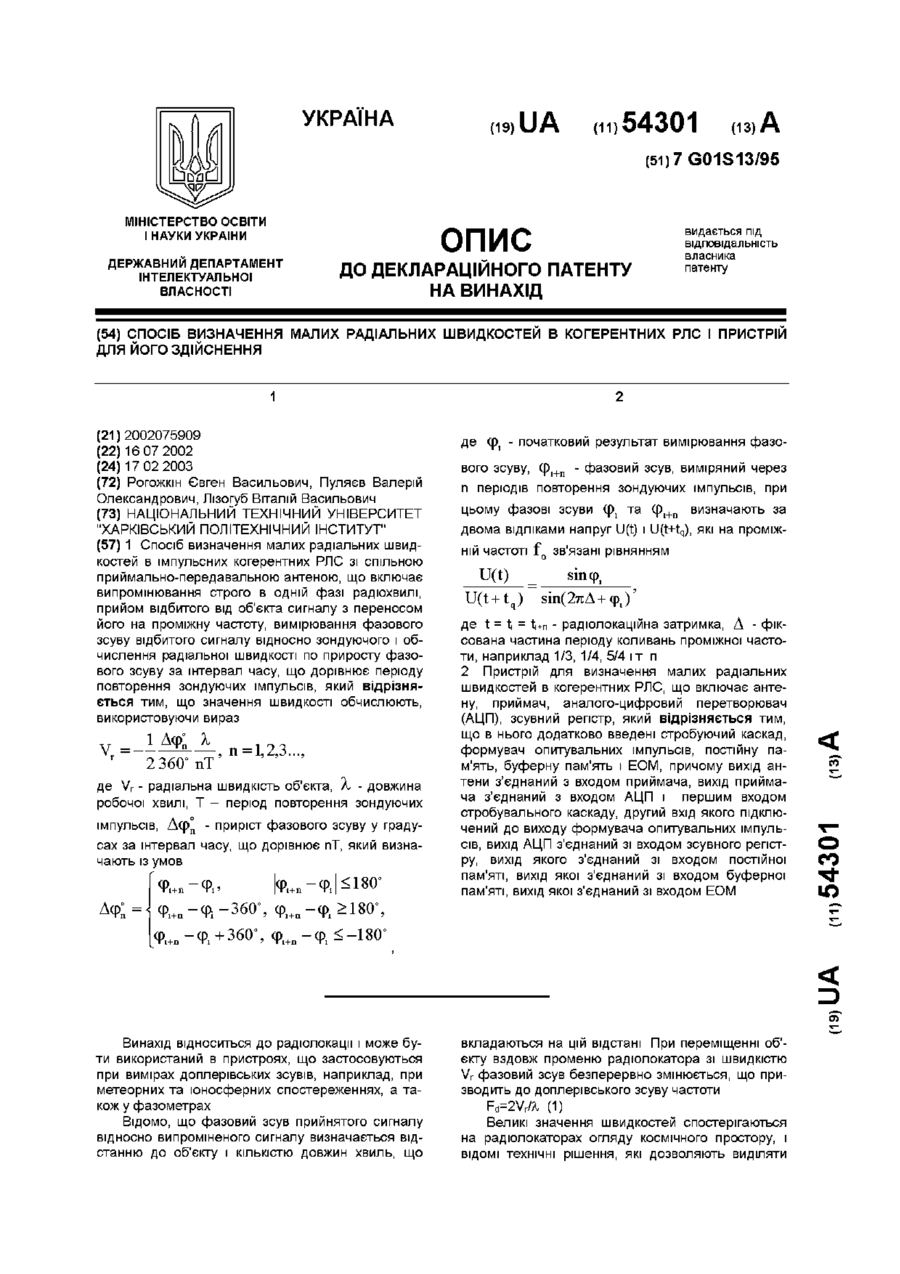
1. Спосіб визначення малих радіальних швидкостей в імпульсних когерентних РЛС зі спільною приймально-передавальною антеною, що включає випромінювання строго в одній фазі радіохвилі, прийом відбитого від об'єкта сигналу з переносом його на проміжну частоту, вимірювання фазового зсуву відбитого сигналу відносно зондуючого і обчислення радіальної швидкості по приросту фазового зсуву за інтервал часу, що дорівнює періоду повторення зондуючих...
Спосіб виміру кута місця цілі

Номер патенту: 32191
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Пророшин Сергій Михайлович, Кудрик Андрій Миколайович
МПК: G01S 17/00
Мітки: кута, цілі, спосіб, місця, виміру
Текст:
...або шляхом електричного сканування діаграми спрямування антени в робочому кутомісцевому секторі радіолокатора. Спосіб-прототип полягає у виконанні таких операцій: періодичне хитання антени (або діаграми спрямування антени) у вертикальній площині розташування цілі в заданому кутомісцевому секторі; випромшення періодичних зондуючих радіоімпульсів на несучій частоті мікрохвильового діапазону; періодичне переключення антени з передачі...
Адаптивний пристрій супроводу маневруючих цілей

Номер патенту: 56074
Опубліковано: 15.04.2003
Автори: Сірик Юрій Анатолійович, Челпанов Артем Володимирович, Карлов Володимир Дмитрийович, Пащенко Руслан Едуардович, Яровий Сергій Володимирович, Коваль Олександр Андрійович
МПК: G01S 13/00, G01S 13/52
Мітки: адаптивний, супроводу, пристрій, цілей, маневруючих
Формула / Реферат:
Адаптивний пристрій супроводу маневруючих цілей, що містить послідовно з'єднані блоки фільтра Калмана другого порядку, фільтра Калмана третього порядку і комутатор, який відрізняється тим, що додатково введені блок виявлення маневру і блок оцінки інтенсивності маневру, причому блок виявлення маневру складається із послідовно з'єднаних блока формування вибірок, блока обчислення рангу, блока обчислення рангової статистики і порогового блока, а...
Пристрій для розподілу газу та утримання каталізатора в каталітичних шарах радіальних або аксіально-радіальних реакторів
Номер патенту: 8084
Опубліковано: 26.12.1995
Автори: Умберто Зарді, Джорджіо Пагані
МПК: B01J 8/04, C01C 1/04, B01J 8/02, B01J 8/00
Мітки: розподілу, радіальних, газу, утримання, каталізатора, каталітичних, пристрій, шарах, аксіально-радіальних, реакторів
Формула / Реферат:
(57) 1. Устройство для распределения газа и удержания катализатора в каталитических слоях радиальных или аксиально-радиальных реакторов, включающее опорный элемент и сетку, отличающееся тем, что опора выполнена в виде выпуклых участков, непроницаемых для газа, выполняющих роль механической опоры для сетки, и проницаемых для газа перфорированных участков, обеспечивающих необходимое падение давления, которые расположены между выпуклыми...
Попередній патент: Самозавантажувальний візок
Наступний патент: Зубний імплантат
Випадковий патент: Пристрій для орієнтування виробів