Привід вертикального наведення і стабілізації танкового озброєння
Номер патенту: 60861
Опубліковано: 15.03.2006
Автори: Мотуз Георгій Іванович, Хандога Анатолій Максимович, Корсун Валентин Петрович, Старков Юрій Володимирович, Мошнін Віктор Миколайович, Положенцев В'ячеслав Васильович, Кралін Володимир Всеволодович
Формула / Реферат
Даний винахід належить до нових сполук формули (І), які діють як модулятори рецептора 5НТ2C. Ці сполуки застосовують у фармацевтичних композиціях, застосування яких включає лікування ожиріння.
 (I)
(I)
Текст
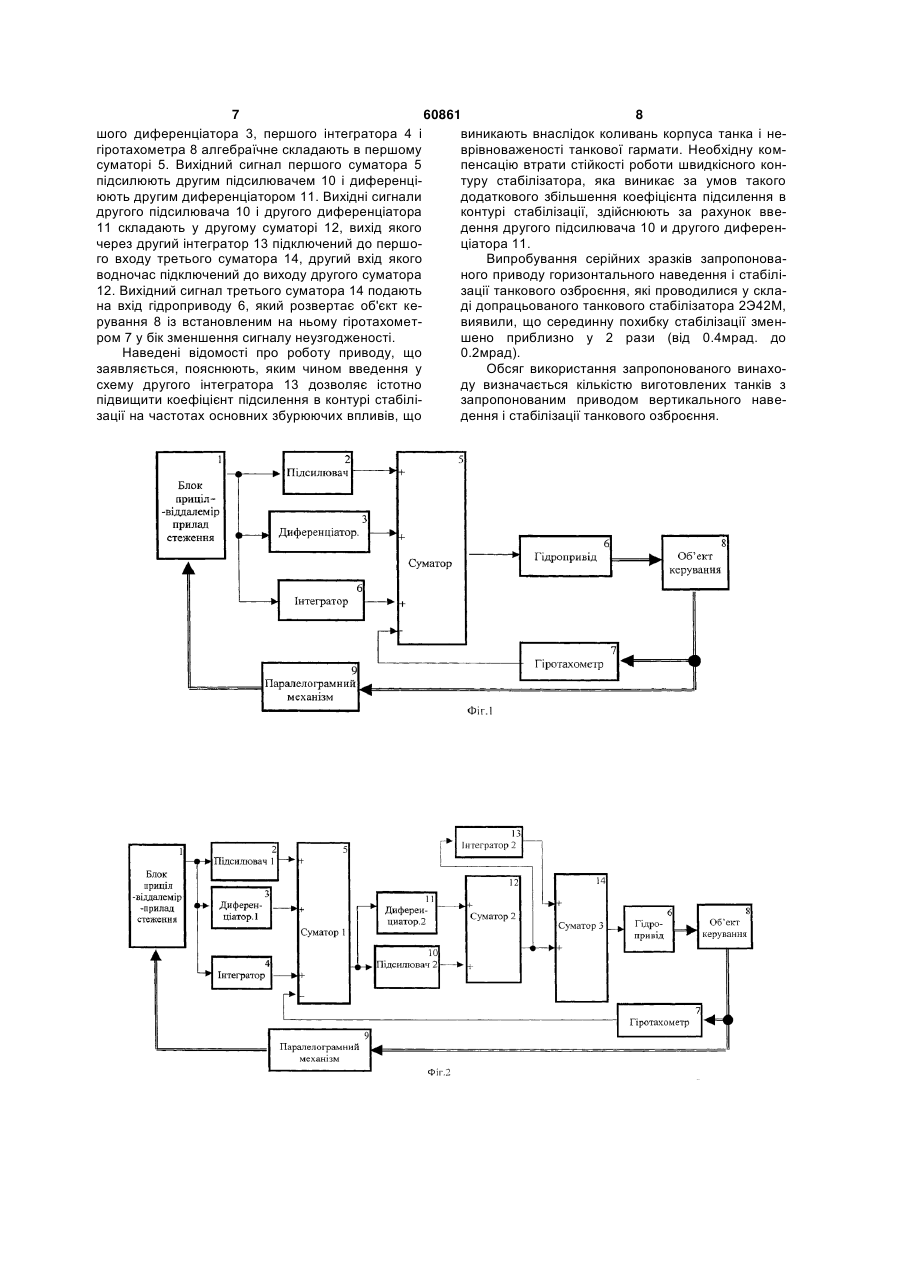
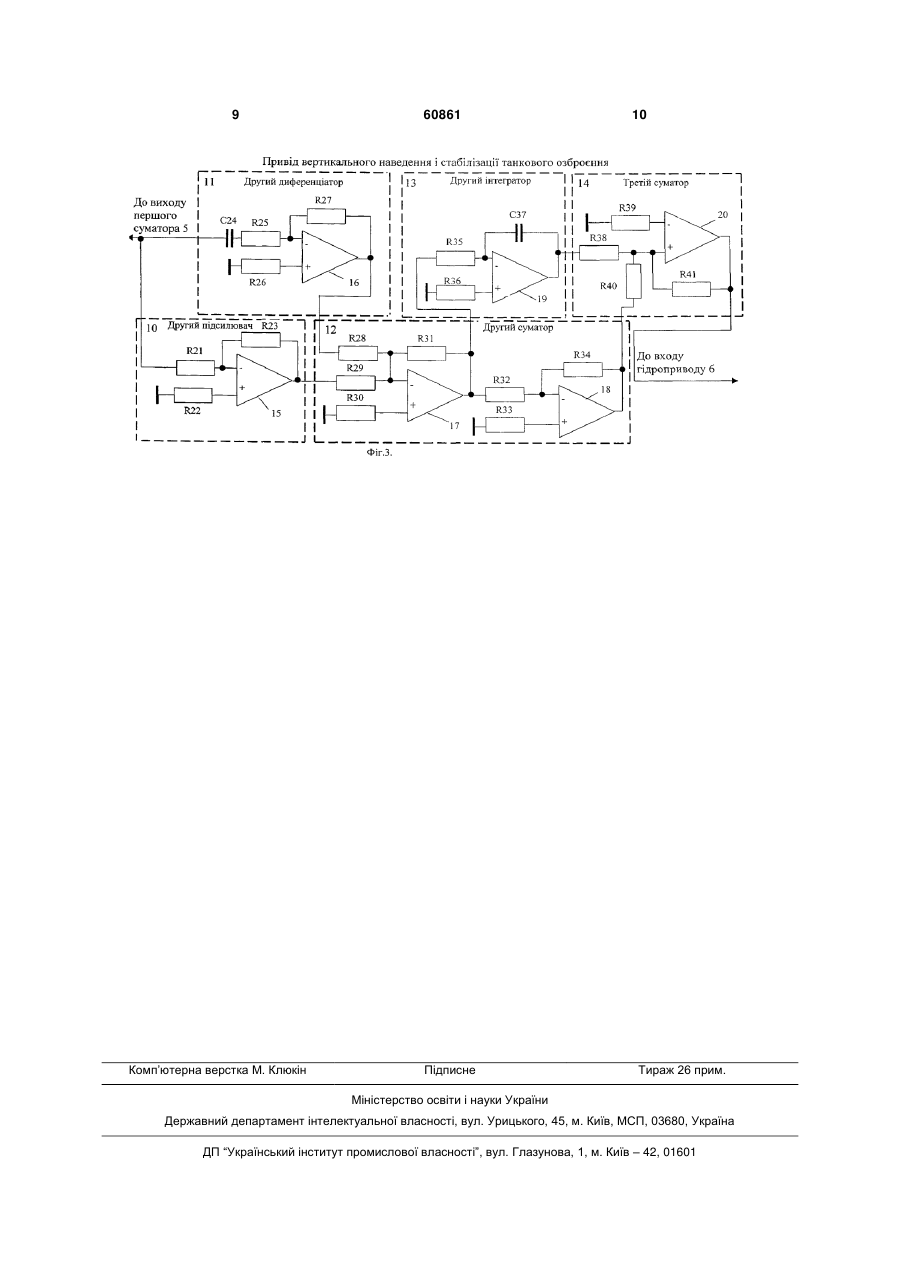
Привід вертикального наведення і стабілізації танкового озброєння, що включає блок прицілвіддалемір - прилад стеження, перший підсилювач, перший диференціатор, перший інтегратор, перший суматор, гідропривід, гіротахометр і об'єкт керування, наприклад гармату танка, на якому розміщений гіротахометр і який з'єднаний з блоком приціл-віддалемір - прилад стеження паралелог C2 1 3 60861 4 ного наведення між віссю гіростабілізатора і пологого введеного суматора для забезпечення підвиженням гармати у режимі стабілізації озброєння щеної добротності внутрішнього (швидкісного танка під час руху останнього по пересіченій місохопленого зворотнім зв'язком по гіротахометру) цевості, з виходу ротора обертального трансфорконтуру гідроприводу, завдяки чому підвищується матора подається на вихід блока прицілточність стабілізації и наведення. віддалемір-прилад стеження 1, який підключений Введення другого диференціатора, підключедо об'єднаних входів підсилювача 2, диференціаного до виходу першого суматора, і включення тора 3 і інтегратора 4, виходи яких з'єднані відпойого паралельно введеному другому підсилювачу відно з першим -, другим - і третім - додатними до першого - додатного входу введеного другого входами першого суматора 5, четвертий - інверсуматора створює додатковий форсуючий сигнал, туючий вхід якого з'єднаний з виходом гіротахомеякий компенсує одну із інерційних складових силотра 7, який формує сигнал коректуючого зворотнової частини приводу наведення і стабілізації у верго зв'язку відповідно до швидкості об'єкта тикальній площині, і дозволяє зберегти стійку рокерування 8, пропорційний до його абсолютної боту внутрішнього контуру приводу після кутової швидкості. збільшення коефіцієнта підсилення, викликаного Крім того, вихід суматора 5 підключений безвводом другого підсилювача 3. посередньо до входу об'єкта керування 8 за допоВведення третього суматора і підключення йомогою гідроприводу 6, який повертає зазначений го другого - додатного входу до виходу введеного об'єкт керування 8 у бік зменшення похибки стабідругого суматора, а також введення другого інтеглізації і наведення. ратора і включення його між виходом другого суНезважаючи на те, що зазначений стабілізаматора і першим - додатним входом третього сутор - прототип забезпечує деяке підвищення точматора (введення пропорційно - інтегрального ності стабілізації і наведення у вертикальній плорегулювання у внутрішній контур приводу вертищині у порівнянні із першим відомим кального наведення) забезпечує додаткове підвистабілізатором, точність стабілізації, яку він здатщення точності стабілізації та наведення. ний забезпечити, залишається на відносно низьКожна із зазначених введених нових ознак є кому рівні. суттєвою, необхідною і достатньою, а сукупність Завданням винаходу є створення такого привведених нових ознак і їх причинно-наслідковий воду вертикального наведення і стабілізації танковзаємозв'язок поміж собою, а також із відомими вого озброєння, який шляхом підвищення точності ознаками прототипу дозволяє забезпечити вирістабілізації вертикального наведення підвищує шення поставленого завдання щодо підвищення ефективність і точність стрільби в заданому наточності наведення і стабілізації танкового озбропрямку, тобто забезпечує розв'язання задачі підєння і тим самим забезпечити точність і ефективвищення ефективності враження супротивника. ність дії об'єкта керування, наприклад, стрільби Завдання підвищення точності стабілізації ветанкової гармати в заданому напрямку. ртикального наведення танкового озброєння розСпівставлювальний аналіз із приводом - пров'язується за рахунок того, що в привід вертикальтотипом показав, що привід, який заявляється, ного наведення, до складу якого входять блок відрізняється від приводу - прототипу наявністю приціл-віддалемір-прилад стеження, підсилювач, нових блоків: підсилювача, диференціатора, інтегдиференціатор, інтегратор, суматор, гідропривід, ратора и двох суматорів, а також сукупністю функгіротахометр і об'єкт керування, наприклад, у виціональних взаємозв'язків пристроїв, що входять гляді гармати танка, на якому встановлений гіродо складу приводу - прототипу, а саме: відсутністю тахометр і який з'єднаний з блоком прицілбезпосереднього підключення (за допомогою гідвіддалемір-прилад стеження паралелограмним роприводу який повертає об'єкт керування у бік механізмом, при цьому вихід блока прицілзменшення похибки стабілізації і наведення) виховіддалемір-прилад стеження підключений до об'єду суматора до входу об'єкта керування. днаних входів підсилювача, диференціатора та Таким чином, привід, що заявляється, відповіінтегратора, виходи яких з'єднані відповідно з педає критерію винаходу -«новизна». ршим -, другим - і третім - додатними входами Аналіз технічного рішення, що заявляється, першого суматора, четвертий - інвертуючий вхід щодо технічних рішень його складових частин виякого з'єднаний з виходом гіротахометра, а вихід явив, що застосовані блоки підсилювача, диферегідроприводу з'єднаний із входом об'єкта керуваннціатора, інтегратора і суматорів широко відомі. ня введено другий підсилювач, другий диференціОднак їх введення за умов зазначеного взаємозатор, другий інтегратор та два суматори, при цьов'язку із іншими складовими частинами приводу за му вихід першого суматора з'єднаний з винаходом дозволяє поліпшити один з основних об'єднаними входами другого підсилювача і другопараметрів приводу вертикального наведення и го диференціатора, виходи яких підключені відпостабілізації - точність стабілізації. відно до першого - та другого - додатних входів Таким чином, привід, що заявляється, відповідругого суматора, вихід якого за допомогою послідає критерію винаходу «винахідницький рівень». довно з'єднаних другого інтегратора і введеного Суть винаходу, що заявляється, пояснюється додатного входу третього суматора з'єднаний кресленнями, де: водночас із входом гідроприводу і з другим - додаНа фіг.1 наведено структурну схему приводу тним входом третього суматора. прототипа, Введення другого підсилювача дозволяє збіна фіг.2 - структурну схему приводу вертикальшити величину сигналу, що поступає з виходу льного наведення и стабілізації танкового озбропершого суматора на другий - додатний вхід друєння, що заявляється ; 5 60861 6 на фіг.3 - один з варіантів схем конкретної ревхід операційного підсилювача 17 через резистор алізації приводу вертикального наведення і стабіR28 з'єднаний з виходом другого диференціатора лізації танкового озброєння, що заявляється. 11 (виходом операційного підсилювача 16) і через Привід вертикального наведення і стабілізації резистор R29 з'єднаний з виходом другого підситанкового озброєння (див. фіг.2) включає до свого лювача 15. Неінвертуючий (додатний) вхід операскладу: блок приціл-віддалемір-прилад стеження ційного підсилювача 17 через резистор R30 з'єд1, перший підсилювач 2, перший диференціатор 3, наний з корпусом, а вихід - через резистор R31 перший інтегратор 4, перший суматор 5, гідроприпідключений до власного інвертуючого входу і чевід 6, гіротахометр 7, об'єкт керування 8, наприрез резистор R32 - до інвертуючого входу операклад, танкова гармата і паралелограмний мехаційного підсилювача 18, неінвертуючий вхід якого нізм 9. В привід вертикального наведення і через резистор R33 з'єднаний з корпусом. Вихід стабілізації додатково введено другий підсилювач операційного підсилювача 18 через резистор R34 10, другий диференціатор 11, другий суматор 12, з'єднаний із власним інвертуючим входом. другий інтегратор 13 і третій суматор 14. До складу другого інтегратора 13 входять два Вихід блока приціл-віддалемір-прилад стерезистори R35 і R36, а також конденсатор С37. ження 1 підключений до об'єднаних входів першоВихід другого суматора 12 (вихід операційного го підсилювача 2, першого диференціатора 3 і підсилювача 17) через резистор R35 підключений першого інтегратора 4, виходи яких з'єднані відподо інвертуючого входу операційного підсилювача відно з першим -, другим - і третім додатними вхо19, неінвертуючий вхід якого через резистор R36 дами першого суматора 5, четвертий - інвертуюз'єднаний з корпусом, а вихід - через конденсатор чий вхід якого підключений до виходу С37 з'єднаний із власним інвертуючим входом. гіротахометра 7. Вихід першого суматора 5 з'єднаДо складу третього суматора 14 входять чотиний з об'єднаними входами другого підсилювача ри резистори R38, R39, R40, R41. Інвертуючий вхід 10 і другого диференціатора 11, виходи яких підкопераційного підсилювача 20 через резистор R38 лючені відповідно до першого - і другого - додатз'єднаний з виходом другого інтегратора 13 (вихоних входів другого суматора 12, вихід якого воднодом операційного підсилювача 19) і через резисчас з'єднаний з другим - додатним входом і через тор R40 з'єднаний з виходом другого суматора 12 другий інтегратор 13 з першим - додатним входом (виходом операційного підсилювача 18). Неінвертретього суматора 14, вихід якого за допомогою туючий вхід операційного підсилювача 20 через гідроприводу 6 з'єднаний з об'єктом керування 8. резистор R39 з'єднаний з корпусом, а вихід - водГіротахометр 7 встановлений на об'єкті керуночас із входом гідроприводу 6 и через резистор вання 8, а блок приціл-віддалемір-прилад стеженR41 - із власним інвертуючим входом. ня 1 - в башті танка. До складу блока прицілЯк видно з наведеного на фіг.3, операційний віддалемір-прилад стеження 1 входять гіростабіліпідсилювач 18 другого суматора 12 разом з резисзатор (на кресленні не наведено), на осі зовнішторами R32, R33 і R34 складають інвертор вихідньої рамки якого закріплений ротор обертального ного сигналу операційного підсилювача 17 для трансформатора, статор якого за допомогою паузгодження фази цього сигналу підчас складання ралелограмного механізму 9 зв'язаний з об'єктом його з вихідним сигналом другого інтегратора 13 у керування 8 (гарматою танка). третьому суматорі 14. Один з варіантів схем конкретної реалізації Усі блоки і вузли приводу вертикального навеприводу вертикального наведення і стабілізації дення і стабілізації танкового озброєння, що заявтанкового озброєння, що заявляється (див. фіг.3) ляється, можуть виконуватись на основі елементвключає введені додатково блоки, а саме: другий ної бази серійного промислового виготовлення. підсилювач 10, другий диференціатор 11, другий Введені додатково нові блоки (другий підсилювач суматор 12, другий інтегратор 13 і третій суматор 10, другий диференціатор 11, другий суматор 12, 14, виконані на базі операційних підсилювачів віддругий інтегратор 13 і третій суматор 14) можуть повідно 15, 16, 17 (і 18), 19, 20. виконуватись на базі операційних підсилювачів Другий підсилювач 10 (див. фіг.3) включає три серійного випуску , наприклад, серії 140УД7. резистори R21, R22 и R23. Вихід першого суматоПривід вертикального наведення і стабілізації ра 5 (наведений на фіг.2, на фіг.3 - не наведений) працює таким чином. У режимі стабілізації танкочерез резистор R21 підключений до інвертуючого вого озброєння підчас руху танка по пересічній входу операційного підсилювача 15, неінвертуюмісцевості за умов наявності збурюючих впливів у чий (додатний) вхід якого через резистор R22 з'єдплощині вертикального наведення має місце кут наний з корпусом, а вихід - через резистор R23 неузгодженості між віссю гіростабілізатора і полоз'єднаний із власним інвертуючим входом. женням гармати. Сигнал напруги, пропорційний До складу другого диференціатора 11 входять цьому куту неузгодженості, з виходу ротора оберконденсатор С24 і три резистори R25, R26 та R27. тального трансформатора поступає на вихід блока Вихід першого суматора 5 через послідовно з'єдприціл-віддалемір-прилад стеження 1, підсилюнані конденсатор С24 і резистор R25 підключений ється першим підсилювачем 2, диференціюється до інвертуючого входу операційного підсилювача першим диференціатором 3 і інтегрується першим 16, неінвертуючий (додатний) вхід якого через реінтегратором 4. За допомогою встановленого на зистор R26 з'єднаний з корпусом, а вихід через об'єкті керування 8 гіротахометра 7 формується резистор R27 з'єднаний із власним інвертуючим сигнал коректуючого зворотного зв'язку за швидківходом. стю об'єкта керування 8, пропорційний його абсоДругий суматор 12 включає сім резисторів лютній кутовій швидкості. R28, R29, R30, R31, R32, R33 і R34. Інвертуючий Вихідні сигнали першого підсилювача 2, пер 7 60861 8 шого диференціатора 3, першого інтегратора 4 і виникають внаслідок коливань корпуса танка і негіротахометра 8 алгебраїчне складають в першому врівноваженості танкової гармати. Необхідну комсуматорі 5. Вихідний сигнал першого суматора 5 пенсацію втрати стійкості роботи швидкісного конпідсилюють другим підсилювачем 10 і диференцітуру стабілізатора, яка виникає за умов такого юють другим диференціатором 11. Вихідні сигнали додаткового збільшення коефіцієнта підсилення в другого підсилювача 10 і другого диференціатора контурі стабілізації, здійснюють за рахунок вве11 складають у другому суматорі 12, вихід якого дення другого підсилювача 10 и другого диференчерез другий інтегратор 13 підключений до першоціатора 11. го входу третього суматора 14, другий вхід якого Випробування серійних зразків запропоноваводночас підключений до виходу другого суматора ного приводу горизонтального наведення і стабілі12. Вихідний сигнал третього суматора 14 подають зації танкового озброєння, які проводилися у склана вхід гідроприводу 6, який розвертає об'єкт кеді допрацьованого танкового стабілізатора 2Э42М, рування 8 із встановленим на ньому гіротахометвиявили, що серединну похибку стабілізації зменром 7 у бік зменшення сигналу неузгодженості. шено приблизно у 2 рази (від 0.4мрад. до Наведені відомості про роботу приводу, що 0.2мрад). заявляється, пояснюють, яким чином введення у Обсяг використання запропонованого винахосхему другого інтегратора 13 дозволяє істотно ду визначається кількістю виготовлених танків з підвищити коефіцієнт підсилення в контурі стабілізапропонованим приводом вертикального навезації на частотах основних збурюючих впливів, що дення і стабілізації танкового озброєння. 9 Комп’ютерна верстка M. Клюкін 60861 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive of vertical aiming and stabilization of tank arms
Автори англійськоюKorsun Valentyn Petrovych, Kralin Volodymyr Vsevolodovych, Motuz Heorhii Ivanovych, Moshnin Viktor Mykolaiovych
Назва патенту російськоюПривод вертикального наведения и стабилизации танкового вооружения
Автори російськоюКорсун Валентин Петрович, Кралин Владимир Всеволодович, Мотуз Георгий Иванович, Мошнин Виктор Николаевич
МПК / Мітки
МПК: F41G 5/00
Мітки: танкового, озброєння, вертикального, наведення, стабілізації, привід
Код посилання
<a href="https://ua.patents.su/5-60861-privid-vertikalnogo-navedennya-i-stabilizaci-tankovogo-ozbroehnnya.html" target="_blank" rel="follow" title="База патентів України">Привід вертикального наведення і стабілізації танкового озброєння</a>
Пристрій дозволу пострілу артилерійської системи танкового озброєння
Номер патенту: 49984
Опубліковано: 15.10.2002
Автори: Мошнін Віктор Миколайович, Бусяк Юрій Митрофанович, Бондаренко Олександр Григорович, Фролов Леонід Андрійович
МПК: F41G 3/00
Мітки: артилерійської, дозволу, озброєння, пристрій, пострілу, системі, танкового
Формула / Реферат:
Пристрій дозволу пострілу артилерійської системи танкового озброєння, що містить виконавчий елемент і послідовно з'єднані датчик помилки стабілізації гармати, блок формування попередженої координати та пороговий пристрій, який відрізняється тим, що в нього додатково введені послідовно з'єднані другий датчик помилки стабілізації гармати, другий блок формування попередженої координати, вихід якого з'єднаний з другим входом порогового пристрою,...
Пристрій наведення
Номер патенту: 43120
Опубліковано: 15.11.2001
Автори: Козелкова Марина Борисівна, Корольова Наталія Анатоліївна, Пашков Дмитро Павлович, Рачинський Олександр Петрович
МПК: G01S 1/00
Формула / Реферат:
Пристрій наведення, що містить антену, приймач, суматор, віднімальний пристрій, силовий слідкувальний привід, датчик зворотного зв'язку, причому першим входом пристрою є перший вхід антени, другим входом пристрою є перший вхід суматора, вихід приймача сполучений з першим входом суматора, вихід суматора підключений до першого виходу віднімального пристрою, другий вихід антени через датчик зворотного зв'язку приєднаний до другого входу...
Протитанкова керована ракета з лазерною системою наведення
Номер патенту: 9358
Опубліковано: 15.09.2005
Автори: Федчук Сергій Володимирович, Жук Сергій Якович, Микитюк Олександр Григорович, Климов Сергій В'ячеславович, Дубровський Євген Миколайович, Слєпов Лев Іванович
МПК: F41A 27/00
Мітки: наведення, керована, ракета, лазерною, протитанкова, системою
Формула / Реферат:
Протитанкова керована ракета з лазерним наведенням, що містить блок приймача лазерного випромінювання, блок виділення команд управління, блок фільтрів корегування, блок гіроскопічного перетворювача команд, блок підсилювача, блок компенсації, блок приводу аеродинамічного керма, блок планера ракети, яка відрізняється тим, що до неї додатково запроваджено блок стабілізації, при цьому вихід блока приймача з'єднаний із входом блока виділення...
Слідкуючий електрогідравлічний привід
Номер патенту: 69233
Опубліковано: 16.08.2004
Автори: Нарожний Віталій Васильович, Кулік Анатолій Степанович, Таран Олександр Миколайович, Лученко Олег Олексійович, Фірсов Сергій Миколайович
МПК: F15B 9/00
Мітки: слідкуючий, привід, електрогідравлічний
Формула / Реферат:
Слідкуючий електрогідравлічний привід, який складається з послідовно з'єднаних задатчика, порівнюючого пристрою, гідропідсилювача і виконавчого гідродвигуна з потенціометром зворотного зв'язку, підключеного через буферний блок фазової корекції до порівнюючого пристрою та схеми корекції, підключеної через перемикаючий пристрій до гідропідсилювача, який відрізняється тим, що до схеми додано блок діагностування потенціометра зворотного зв'язку,...
Система кутової стабілізації космічних апаратів
Номер патенту: 4526
Опубліковано: 17.01.2005
Автори: ТРОНЬ ЮРІЙ ОПАНАСОВИЧ, Кузякін Юрій Петрович
МПК: B64G 1/28
Мітки: апаратів, стабілізації, система, космічних, кутової
Формула / Реферат:
Система кутової стабілізації космічних апаратів, що містить послідовно з'єднані електропривід, редуктор і маховик, яка відрізняється тим, що вона споряджена другим електроприводом, другим редуктором, причому виходи першого та другого редукторів, підключені до першого та другого входам диференціала, вихід якого з'єднай з маховиком, вихід першого редуктора через перший вимірювач кутової швидкості першого електропривода та перший масштабний...
Попередній патент: Арбалет
Наступний патент: Привід горизонтального наведення і стабілізації танкового озброєння
Випадковий патент: Спосіб очищення води від іонів цинку