Пристрій дозволу пострілу артилерійської системи танкового озброєння
Номер патенту: 49984
Опубліковано: 15.10.2002
Автори: Фролов Леонід Андрійович, Бондаренко Олександр Григорович, Мошнін Віктор Миколайович, Бусяк Юрій Митрофанович
Формула / Реферат
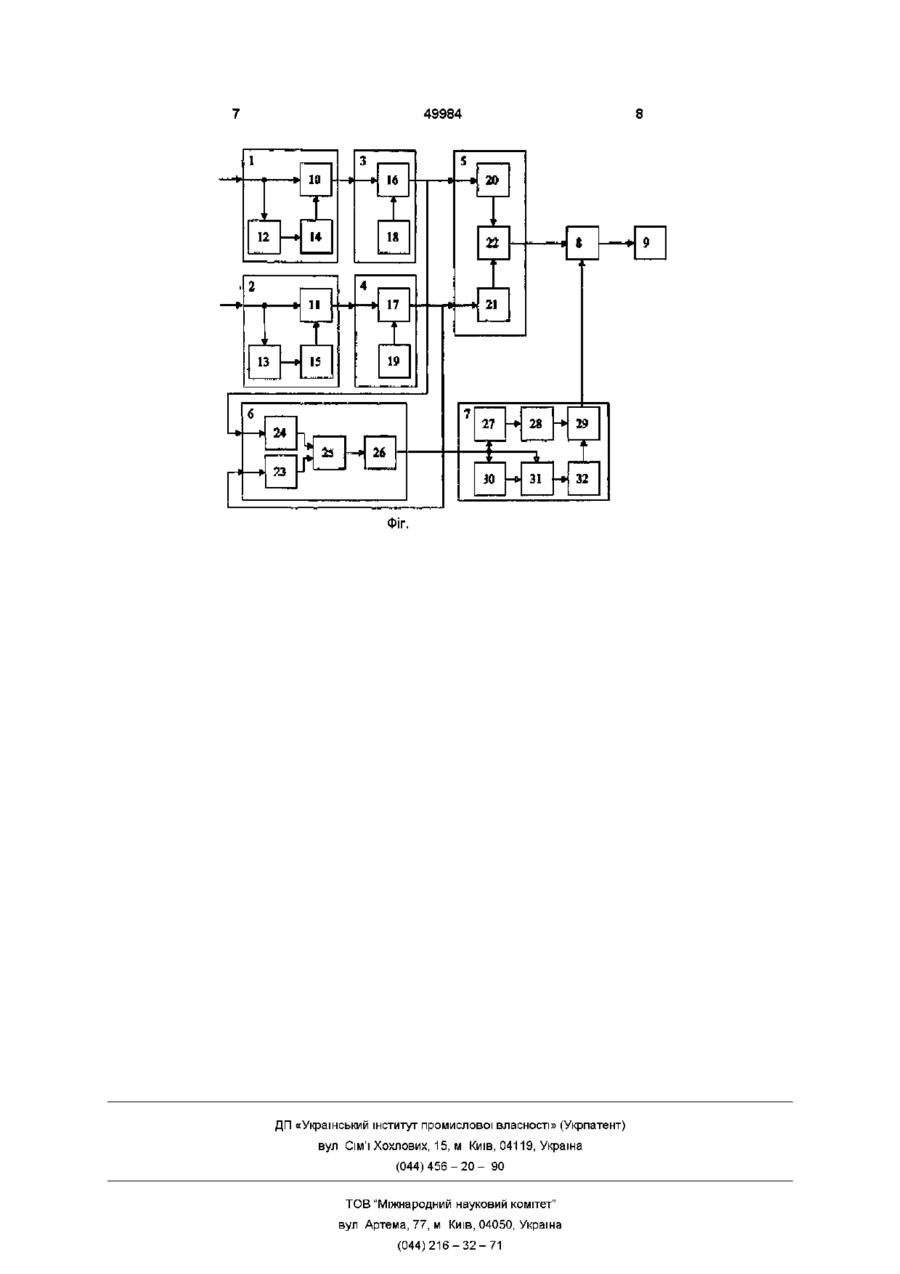
Пристрій дозволу пострілу артилерійської системи танкового озброєння, що містить виконавчий елемент і послідовно з'єднані датчик помилки стабілізації гармати, блок формування попередженої координати та пороговий пристрій, який відрізняється тим, що в нього додатково введені послідовно з'єднані другий датчик помилки стабілізації гармати, другий блок формування попередженої координати, вихід якого з'єднаний з другим входом порогового пристрою, і послідовно з'єднані блок визначення модуля вектора непогодження, блок визначення мінімуму вектора непогодження і схему І, вхід якої з'єднаний з виходом порогового пристрою, а вихід - з входом виконавчого пристрою, при цьому виходи першого та другого блоків формування попередженої координати з'єднані з першим та другим входами блока визначення модуля вектора непогодження.
Текст
Пристрій дозволу пострілу артилерійської системи танкового озброєння, що містить виконавчий елемент і послідовно з єднані датчик помилки стабілізації гармати, блок формування попередженої координати та пороговий пристрій, який відрізняється тим, що в нього додатково введені послідовно з'єднані другий датчик помилки стабілізації гармати, другий блок формування попередженої координати, вихід якого з'єднаний з другим входом порогового пристрою, і послідовно з'єднані блок визначення модуля вектора непогодження, блок визначення мінімуму вектора непогодження і схему І, вхід якої з'єднаний з виходом порогового пристрою, а вихід - з входом виконавчого пристрою, при цьому виходи першого та другого блоків формування попередженої координати з'єднані з першим та другим входами блока визначення модуля вектора непогодження Винахід стосується об'єктів бронетанкової техніки, зокрема систем керування вогнем танка Відомий пристрій дозволу пострілу артилерійської системи танкового озброєння, що містить послідовно з'єднані датчик помилки стабілізації танкової гармати, пороговий пристрій і реле, включене в ланцюг керування стрільбою, а також датчик абсолютної швидкості ствола гармати і блок формування опорного сигналу Входи блока формування опорного сигналу з'єднані з входами датчика абсолютної швидкості ствола гармати і блока формування модуля сигналу помилки стабілізації танкової гармати Вихід блока формування опорного сигналу з'єднаний з входом порогового пристрою (ТО и ИЭ танка Т-64, с 201) границь цієї «зони дозволу» призводить до збільшення часу чекання пострілу, що недопустимо в бойовій обстановці Відомий також пристрій дозволу пострілу артилерійської системи танкового озброєння, що містить послідовно з'єднані датчик помилки стабілізації гармати, суматор, послідовно з'єднані блок формування модуля сигналу, пороговий пристрій, підсилювач і реле, включені в ланцюг керування стрільбою, а також датчик швидкості зміни помилки стабілізації, вихід якої підключений до другого входу суматора (Объект 5А1 335 060 ТО Техническое описание и инструкция по эксплуатации комплекса 1А95, с 51) Недоліком такого пристрою є те, що момент визначення дозволу пострілу здійснюється при достатньо широкій зоні дозволу, зменшення якої неминуче призводить до збільшення часу чекання пострілу, що в умовах сучасного бою недопустимо Найбільш близьким до винаходу по технічній суті є пристрій для дозволу пострілу артилерійської системи танкового озброєння, що містить виконавчий елемент і послідовно з'єднані датчик помилки стабілізації гармати, блок формування попередженої координати та пороговий пристрій Блок формування попередженої координати, вхід і вихід якого підключені до датчика помилки стабілі При відсутності безперервних і нерівномірних ЛІНІЙНИХ переміщень і кутових коливань гармати указаний пристрій дозволяє достатньо точно визначити момент дозволу пострілу Проте, при стрільбі танка з ходу навіть з урахуванням абсолютної швидкості руху ствола гармати момент визначення дозволу пострілу практично не пов'язаний з величиною помилки стабілізації гармати, що негативно впливає на точність стрільби Це обумовлено наявністю так званої «зони дозволу» пострілу, яка визначається як деякий тілесний кут, у межах якого забезпечується дозвіл пострілу Зменшення О 00 49984 зацм гармати і до порогового пристрою ВІДПОВІДНО, МІСТИТЬ суматор і послідовно з'єднані диференціюючий пристрій і масштабуючий підсилювач, вихід якого зв'язаний з входом суматора У відомому пристрої момент дозволу пострілу артилерійської системи танкового озброєння визначається при знаходженні вершини вектора помилки стабілізації у "зоні дозволу" При цьому не враховується, що величина цього вектора помилки стабілізації повинна бути мінімальна по абсолютній величині При цьому для підвищення точності визначення моменту дозволу пострілу необхідно одночасно здійснити часову синхронізацію виділення мінімально заданих сигналів попереджених координат помилок стабілізації у вертикальній та горизонтальній площинах з мінімумом сигналу модуля вектора помилки стабілізації гармати В основу винаходу поставлено задачу удосконалення пристрою дозволу пострілу артилерійської системи танкового озброєння, в якому шляхом введення другого каналу врахування коливань гармати в горизонтальній площині та додаткового ланцюга визначення мінімуму модуля вектора непогодження коливань гармати у вертикальній та горизонтальній площинах досягається зведення до мінімуму величини помилки стабілізації ствола гармати Завдяки цьому забезпечується підвищення точності визначення дозволу пострілу гармати під час ведення танком стрільби з ходу Поставлена задача вирішується тим, що у відомий пристрій дозволу пострілу артилерійської системи танкового озброєння, що містить виконавчий елемент і послідовно з'єднані перший датчик помилки стабілізації гармати, перший блок формування попередженої координати та пороговий пристрій, згідно з винаходом, введені послідовно з'єднані другий датчик помилки стабілізації гармати, другий блок формування попередженої координати, вихід якого з'єднаний з другим входом порогового пристрою, і послідовно з'єднані блок визначення модуля вектора непогодження, блок визначення мінімуму вектора непогодження коливань гармати і схему І, вхід якої з'єднаний з виходом порогового пристрою, а вихід - з входом виконавчого пристрою, при цьому виходи першого та другого блоків формування попередженої координати з'єднані з першим та другим входами блока визначення вектора непогодження Введення нових ознак у взаємозв'язку з відомими ознаками дозволило суттєво підвищити точність визначення моменту дозволу пострілу при веденні танком стрільби з ходу При цьому вдалось, з одного боку, оптимізувати тривалість часу чекання пострілу, а, з іншого боку, забезпечити точність визначення моменту дозволу пострілу при мінімальних помилках стабілізації гармати Введення другого каналу ланцюга визначення мінімуму модуля вектора вироблення сигналу дозволу за умови мінімуму модуля вектора помилки стабілізації гармати і схеми І дозволило оптимізувати момент подачі першого та другого сигналів на дозвіл пострілу Це досягається при мінімальних помилках стабілізації гармати в інтервалі зони дозволу Завдяки цьому вдалось суттєво підвищити точність визначення моменту дозволу пострілу при веденні танком стрільби з ходу Суть винаходу пояснюється кресленням, на якому зображена блок-схема пристрою дозволу пострілу артилерійської системи танкового озброєння Пристрій дозволу пострілу артилерійської системи танкового озброєння містить датчики 1,2 помилки стабілізації гармати, підключені через перший та другий блоки 3,4 формування попередженої координати до входів порогового пристрою 5, послідовно з'єднані блок 6 визначення модуля вектора непогодження, блок 7 визначення мінімуму вектора, схема 8 І, другий вхід якої підключений до виходу порогового пристрою 5, і виконавчий елемент 9 Перший та другий входи блока 6 визначення модуля вектора непогодження підключені до входів першого блока 3 та другого блока 4 формування попередженої координати Датчики 1,2 помилки стабілізації гармати призначені для визначення помилки стабілізації гармати в горизонтальній та вертикальній площинах ВІДПОВІДНО Схемна побудова датчиків 1,2 помилки стабілізації гармати ідентична Вони містять суматори 10,11, диференціюючі пристрої 12,13 і масштабуючі підсилювачі 14,15 ВІДПОВІДНО Перші входи суматорів 10,11 підключені до входів диференціюючих пристроїв 12,13 ВІДПОВІДНО, виходи яких зв'язані з входами масштабуючих підсилювачів 14,15 Виходи масштабуючих підсилювачів 14,15 підключені до других входів суматорів 10,11 ВІДПОВІДНО Виходи суматорів 10,11 з'єднані з входами блоків 3,4 формування попереджених координат Блоки 3,4 формування попереджених координат ідентичні Вони містять перший та другий суматори 16,17, зв'язані з датчиками 18,19 швидкості вимірювання помилки стабілізації ВІДПОВІДНО ВИХОДИ суматорів 16,17 підключені до першого та другого входів порогового пристрою 5 і до першого та другого входів блока 6 визначення модуля вектора непогодження Пороговий пристрій 5 визначає форму "зони дозволу" типу прямокутник Він МІСТИТЬ компаратори 20,21, які є входами порогового пристрою 5, і пристрій 22 збігу, входи якого підключені до виходів компараторів 20,21, а вихід - до першого входу схеми 8 І Блок 6 визначення модуля вектора непогодження містить блоки 23,24 піднесення до квадрату, суматор 25 і блок 26 обчислення кореня Входи блоків 23,24 піднесення до квадрату зв'язані з виходами блоків 3,4 формування попереджених координат, а їх виходи - з першим та другим входами суматора 25 Вихід суматора 25 через блок 26 обчислення кореня зв'язаний з входом блока 7 визначення мінімуму вектора Блок 7 визначення мінімуму вектора непогодження містить послідовно з'єднані диференціюючий пристрій 27, компаратор 28, схему 29 І, вихід якої є виходом блока 7 визначення мінімуму вектора, а також послідовно з'єднані ЛІНІЮ ЗО затримки, віднімальний пристрій 31 і компаратор 32, вихід якого підключений до другого входу схеми 29 І Перший вхід віднімального пристрою 31 зв'язаний з виходом блока 6 визначення модуля вектора непогодження, другий вхід з'єднаний через ЛІНІЮ ЗО затримки з виходом диференціюючого при 49984 строю 27 Перелічені блоки є штатними і використовуються у танку Т-84УД, що випускається серійно Пристрій дозволу пострілу працює таким чином Під час руху танка по пересіченій місцевості на гармату діють збурні діяння в горизонтальній та вертикальній площинах наведення Сигнал непогодження, що виникає на виході слідкувальної системи (не показана), подається до перших входів суматорів 10,11 датчиків 1,2 помилки стабілізації гармати ВІДПОВІДНО Одночасно ці сигнали через диференціюючі пристрої 12,13 і масштабуючі підсилювачі 14,15 подаються до других входів суматорів 10,11 датчиків 1,2 помилки стабілізації гармати ВІДПОВІДНО При цьому на виходах суматорів 11,12 датчиків 1,2 помилки стабілізації гармати формуються комплексні сигнали, які враховують не тільки значення статичної помилки, але й величину швидкості и зростання чи убування Ці сигнали, пропорційні сумам помилок непогодження і похідним цих помилок по горизонталі (Р) та вертикалі (а), подаються до перших входів суматорів 16,17 блоків 3,4 формування попереджених координат, а до других входів цих суматорів 16,17 з датчиків 18,19 надходять сигнали, пропорційні швидкостям вимірювання помилок стабілізації по горизонталі (Р) та вертикалі (а) Після підсумовування на виходах суматорів 16,17 блоків 3,4 формування попереджених координат створюються результуючі сигнали, пропорційні значенням попереджених координат помилок стабілізації Для вертикальної складової значення попередженої координати помилки стабілізації визначається згідно з формулою _ , cla/dt ау-а+ Хр, де аа у - значення попередженої координати помилки стабілізації, а - значення помилки стабілізації, хр - час затримки пострілу Ці сигнали подаються до першого та другого входів порогового пристрою 5, структура якого визначає форму "зони дозволу" типу прямокутник і є входами компараторів 20,21 Коли обидва значення сигналів з виходів суматорів 16,17 блоків 3,4 формування попереджених координат будуть менше заданих значень, на виходах компараторів 20,21 формуються рівні сигналів, які подаються до пристрою 22 порівняння, і на його виході з'являється перший сигнал дозволу на здійснення пострілу, що подається до першого входу схеми 8 І Одночасно з виходів суматорів 16,17 блоків 3,4 попередження координат, сигнали, пропорційні попередженим координатам помилок а і р, надходять до блоків 23,24 піднесення до квадрату блока 6 визначення модуля вектора непогодження Сформовані в блоках 23,24 квадратичні значення сигналів, пропорційні квадратам непогодження 2 2 помилки гармати в двох площинах а і р , підсумовуються в суматорі 25 і надходять до входу блока 26 обчислення кореня На виході блока 26 обчислення кореня формується сигнал, пропорційний кореню із суми квадратів вхідних сигналів Таким чином визначається модуль вектора попередженої помилки стабілізації за вхідними 2 2 координатами а і р згідно з формулою Ja + р З виходу блока 6 визначення модуля вектора попередженої помилки стабілізації (непогодження) сигнал, пропорційний модулю вектора попереджених координат непогодження, надходить до входу блока 7 визначення мінімуму вектора Сигнал, що змінюється за часом, з виходу блока 26 обчислення кореня, який одночасно є виходом блока 6 визначення модуля вектора непогодження, формує на виході диференціюючого пристрою 27 сигнал, пропорційний ПОХІДНІЙ вхідного сигналу за часом, який подається до входу компаратора 28 Коли рівень сигналу похідної менше визначеної величини, тобто при значенні, близькому до нуля, спрацьовує компаратор 28 і на його вході з'являється сигнал дозволу, що надходить до входу лінії ЗО затримки, на виході якої з'являється значення затриманого вхідного сигналу Цей затриманий вхідний сигнал подається до входу віднімального пристрою 31 У віднімальному пристрої 31 з поточного значення вихідного сигналу віднімається сигнал з виходу лінії ЗО затримки і їх різниця подається до входу компаратора 32, який спрацьовує, якщо значення цієї різниці більше нуля Це відбувається в момент, якщо вхідний сигнал починає зростати з появою на його виході сигналу дозволу пострілу Цей сигнал подається до другого входу пристрою 29 І При наявності на обох входах схеми І 29 сигналів дозволу, що відбувається, якщо похідна другого сигналу близька до нуля, і сигнал починає зростати, формується другий сигнал дозволу на здійснення пострілу, за умови мінімуму модуля вектора непогодження попереджених координат на даний момент часу Якщо на обох входах схеми 8 І одночасно з'являються перший та другий сигнали дозволу на здійснення пострілу, до входу виконавчого елемента 9 прикладається напруга, під дією якої замикаються ланцюги для здійснення пострілу Таким чином, пристрій дозволу пострілу артилерійської системи танкового озброєння дозволяє вибрати оптимальний момент для здійснення пострілу при стрільбі з ходу, коли помилка стабілізації мінімальна і знаходиться в зоні дозволу, що підвищує точність визначення дозволу пострілу 49984 10 • 16 + 20 12 14 IS 22 -f » 11 17 21 13 —* 15 19 28 24 in н> 31 -+32 ФІГ. ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюUnit for fire permit of artillery system of tank armament
Автори англійськоюBusiak Yurii Mytrofanovych, Moshnin Viktor Mykolaiovych, Bondarenko Oleksandr Hryhorovych, Frolov Leonid Andriiovych
Назва патенту російськоюУстройство разрешения прострела артиллерийской системы танкового вооружения
Автори російськоюБусяк Юрий Митрофанович, Мошнин Виктор Николаевич, Бондаренко Александр Григорьевич, Фролов Леонид Андреевич
МПК / Мітки
МПК: F41G 3/00
Мітки: артилерійської, системі, озброєння, пострілу, дозволу, танкового, пристрій
Код посилання
<a href="https://ua.patents.su/4-49984-pristrijj-dozvolu-postrilu-artilerijjsko-sistemi-tankovogo-ozbroehnnya.html" target="_blank" rel="follow" title="База патентів України">Пристрій дозволу пострілу артилерійської системи танкового озброєння</a>
Пристрій для зниження рівня звуку пострілу з вогнепальної зброї
Номер патенту: 549
Опубліковано: 15.09.2000
Автори: Писаренко Віктор Григорович, Заєць Петро Андрійович, Терещук Микола Миколайович
МПК: F41A 21/30
Мітки: зниження, пострілу, пристрій, звуку, рівня, вогнепальної, зброї
Формула / Реферат:
Пристрій для зниження рівня звуку пострілу э вогнепальної зброї, що містить корпус з перегородками, які мають отвори вздовж осі, розташований в кожусі циліндричної форми з насічками на зовнішній поверхні, отвір з внутрішньою різзю і упором, вхідний кульовий отвір, вихідний кульовий отвір, який відрізняється тим, що корпус з перегородками виконаний однією деталлю, причому чотири перегородки розташовані одна за одною під гострим...
Ствол артилерійської гармати

Номер патенту: 35696
Опубліковано: 16.04.2001
Автори: Тісновський Леонід Рахмилович, Бондаренко Леонід Іванович
МПК: F41A 21/00
Мітки: ствол, гармати, артилерійської
Формула / Реферат:
1. Ствол артилерійської гармати, що містить безпосередньо ствол, виконаний у вигляді товстостінної труби перемінного перерізу, що звужується до дулової частини, яка має канал з нарізами вздовж останнього, виконаними по гвинтовій лінії, який відрізняється тим , що нарізи в каналі ствола виконані полігонального типу, а на зовнішній частині ствола виконано N ребер жорсткості.2. Ствол артилерійської гармати по п.1, який відрізняється тим,...
Спосіб визначення кута пострілу з автомата ак-74 відносно перешкоди за формою пояска обтирання кулі
Номер патенту: 30851
Опубліковано: 15.12.2000
Автор: Козаченко Ігор Миколайович
МПК: F41C 27/00
Мітки: пояска, обтирання, спосіб, пострілу, автомата, кулі, формою, кута, відносної, перешкоди, ак-74, визначення
Формула / Реферат:
Спосіб визначення кута пострілу з автомата АК-74 відносно перешкоди за формою пояска обтирання кулі, який відрізняється тим , що визначають зовнішній вигляд пояска обтирання кулі і при його формі у вигляді правильного п'ятикутника, вершина якого звернена в бік , протилежний напряму пострілу , визначають кут пострілу відносно перешкоди в межах 45° - 60°.
Пристрій для гальмування відкатних частин артилерійської гармати
Номер патенту: 24709
Опубліковано: 30.10.1998
Автор: Сергєєв Юрій Федорович
МПК: F41A 25/00
Мітки: гальмування, пристрій, гармати, частин, артилерійської, відкатних
Формула / Реферат:
Устройство для торможения откатных частей артиллерийского орудия, включающее закрепленный на лафете цилиндр» заполненный гидравлической жидкостью, соединенный соткатными частями шток с поршнем и один или несколько инерционных элементов с отверстиями, отличающееся тем, что поршень снабжен стаканом, на котором размещены подпружиненные инерционные элементы, имеющие возможность перемещения вдоль стакана, при этом на стакане и инерционных...
Глушник шуму пострілу з вогнепальної зброї
Номер патенту: 26090
Опубліковано: 30.04.1999
Автори: Сербін Володимир Вікторович, Свириденко Микола Федорович, Осташев Леонід Андрійович, Коновалов Микола Анатолійович, Барановський Віталій Олександрович, Межуів Микола Миколайович, Олексіїв Юрій Сергійович, Поляков Геннадій Анатолійович, Нода Олександр Олексійович
МПК: F41A 21/30
Мітки: шуму, зброї, вогнепальної, глушник, пострілу
Формула / Реферат:
1. Глушник шуму пострілу з вогнепальної зброї, що містить газовід з співвісними вхідним і вихідним отворами, пристрій для відведення порохових газів з газоводу і теплообмінник для їхнього охолодження, який відрізняється тим, що газовід виконано з гідравлічним діаметром, більшим діаметра вихідного отвору ствола зброї, а пристрій для відведення порохових газів виконано в вигляді проточної ємності, приєднаної до газоводу нахиленим в сторону його...
Попередній патент: Спосіб виготовлення бюстгальтера та мірний бюстгальтер для його здійснення
Наступний патент: Ланцюговий досилач
Випадковий патент: Транспортний засіб із стабілізацією системи технічного зору для моніторингу стану сільськогосподарських угідь