Привід горизонтального наведення і стабілізації танкового озброєння
Номер патенту: 60862
Опубліковано: 15.03.2006
Автори: Мотуз Георгій Іванович, Положенцев В'ячеслав Васильович, Мошнін Віктор Миколайович, Кралін Володимир Всеволодович, Старков Юрій Володимирович, Корсун Валентин Петрович, Вакуленко Володимир Вікторович
Формула / Реферат
Корисна модель відноситься до сільськогосподарського машинобудування, зокрема, зернозбиральних машин.
Відомий сепаратор зернового вороху зернозбиральних комбайнів що приводиться в дію ексцентриковим вібратором через шатуни [Зерноуборочные комбайны "Дон" / Ю.А. Песков, И.К. Мещеряков, Ю.Н. Ярмашев и др. - М.: Агропромиздат, 1986. - 333с.].
Недоліком такої конструкції є те, що привід відомого сепаратора зернового вороху має підвищену енергоємність через пуско-гальмівні операції. У даному випадку роботоздатність привода буде мала, бо він сприйматиме знакозмінні навантаження.
Корисною моделлю ставиться завдання зменшити енергоємність приводу сепаратора зернового вороху та збільшити його довговічність.
Поставлене корисною моделлю завдання досягається тим, що у сепараторі зернового вороху, що містить сепаруючі секції та кривошипно-шатунний привод, згідно корисної моделі одна з двох розміщених паралельно сепаруючих секцій зв'язана з ексцентриковим вібратором за допомогою кривошипа, а інша за допомогою кривошипа, який зміщено відносно першого на кут 90° (p/2) у напрямку обертання.
У приводі сепаратора радіус кривошипа значно менше довжини шатуна, то закон зміни швидкості сепаратора відбувається за синусоїдою, причому, якщо у першої секції сепаратора досягається максимальне значення, то у другої секції швидкість у цей час дорівнює нулю. Отже, прискорення секцій, яке змінюється за косинусоїдою, буде весь час постійним, бо, якщо у першій секції воно матиме максимальне значення, то у другій це ж прискорення дорівнюватиме нулю, а тому сили опору руху увесь час роботи сепаратора будуть постійні.
На Фіг.1 подано загальний вигляд сепаратора, на Фіг.2 подано вигляд у плані.
Сепаратор складається з транспортної дошки 1, верхнього 2 та нижнього 3 решіт, що підвішені на важелях передньої 4 та задньої 5 підвіски. Перша секція 6 сепаратора за допомогою шатуна 7 з'єднана з переднім кривошипом 8, а друга секція 9 за допомогою шатуна 10 з'єднана із заднім кривошипом 11. Кут між кривошипами 8 та 11 складає 90° (p/2). Зерновий ворох, який підлягає сепарації, знаходиться в бункері 12. Для регулювання кількості зернового вороху, що поступає на сепаратор, встановлено заслінку 13. Для створення необхідного потоку повітря використовують вентилятор 14. Сепаратор приводиться в дію мотор-редуктором 15 через муфту 16.
Сепаратор зернового вороху працює так. Зерновий ворох, який необхідно сепарувати подають до бункера 12. За допомогою регулювальної заслінки 13 досягається потрібна подача вороху на секції сепаратора 9 та 6, які підвішені на важелях передньої 4 та задньої 5 підвіски. При обертанні вихідного вала мотор-редуктора 15 через муфту 16 обертовий рух передається кривошипам 8 та 11, а потім через шатуни 10 і 7 коливальний рух передається секціям 9 та 6, які будуть коливатись разом з ворохом, що сепарують. Закон зміни швидкості відбувається за синусоїдою, причому внаслідок того, що кривошипи розміщені під кутом 90° один до одного в одній із секцій буде максимум швидкості, а в іншій мінімум. Прискорення секцій змінюється за законом косинусоїди, причому, коли у першій секції 6 буде мінімальне значення, то у секції 9 буде максимальне значення. А в цілому сумарні величини опору руху обох секцій будуть постійні.
Таким чином, витрати енергії на одиницю маси сепарованого вороху будуть мінімальні, а у зв'язку з тим, що навантаження на привод постійні, то і довговічність елементів привода буде збільшена.
Текст
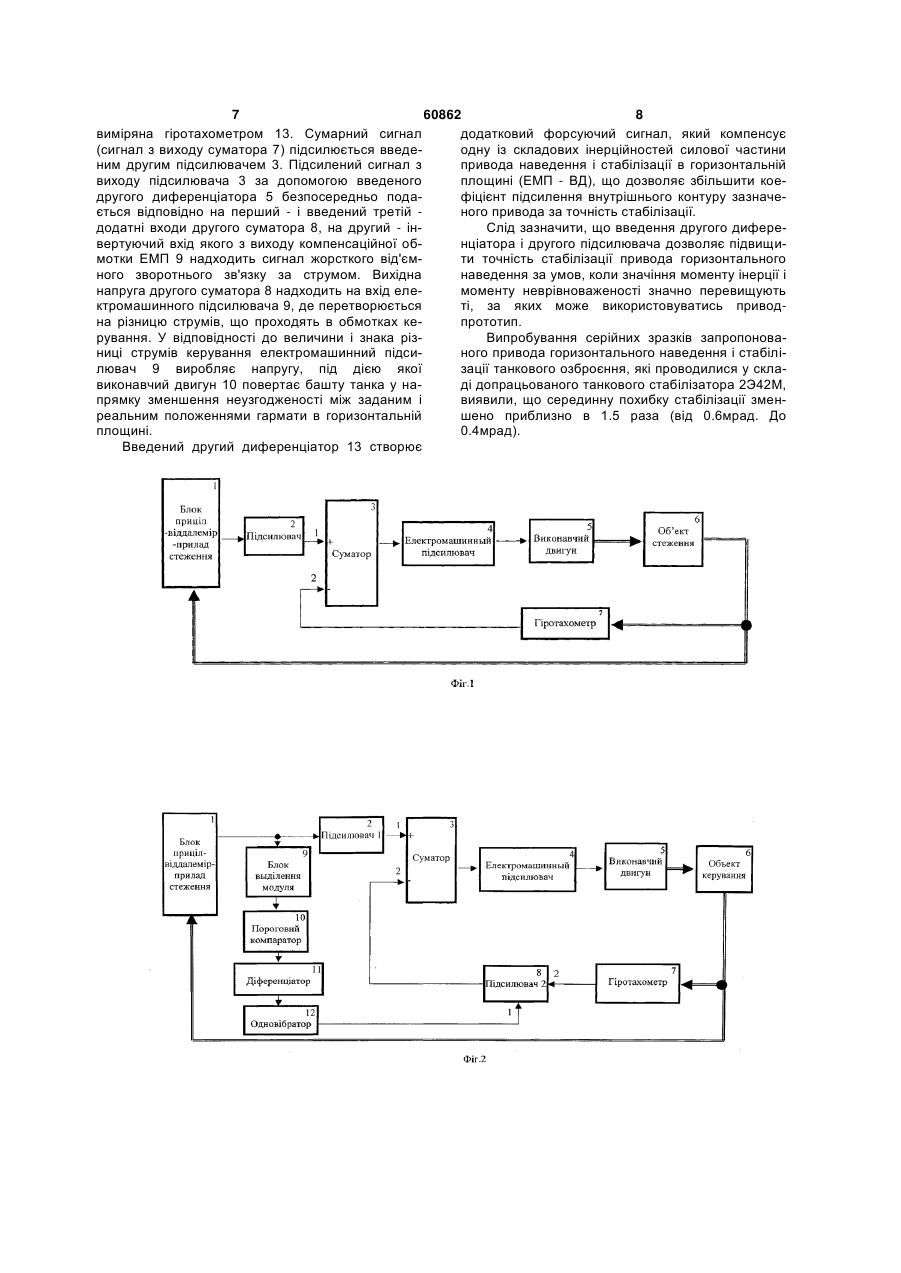
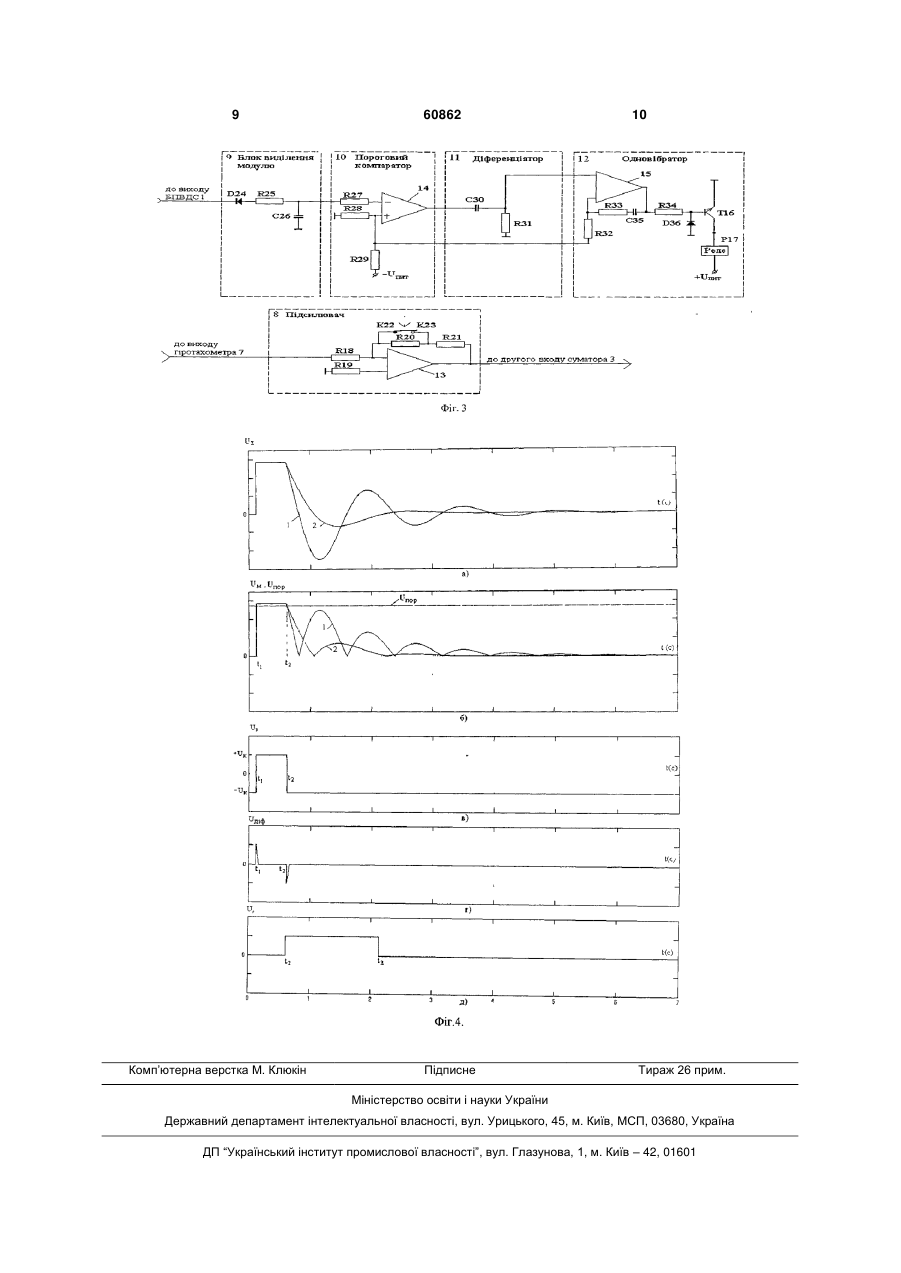
Привід горизонтального наведення і стабілізації танкового озброєння, до складу якого входять блок приціл-віддалемір - прилад стеження, підсилювач, диференціатор, інтегратор, два суматори, електромашинний підсилювач, виконавчий двигун, датчик струму, гіротахометр і об'єкт керування, наприклад башта танка, на якому розміщені гіротахометр і блок приціл-віддалемір - прилад стеження, при цьому вихід блока приціл-віддалемір C2 1 3 60862 4 лючений до виходу блока приціл - віддалемір Завданням винаходу є створення такого приприлад стеження 1, який підключено до об'єднаводу наведення і стабілізації танкового озброєння, них входів підсилювача 2, диференціатора 4 та який шляхом підвищення точності стабілізації гоінтегратора 6, виходи яких підключені відповідно ризонтального наведення підвищує ефективність і до першого-, другого- і третього - додатних (неінточність стрільби в заданому напрямку, тобто сповертуючих) входів першого суматора 7, четвертий живчі властивості стабілізатора. - інвертуючий вхід якого з'єднаний з виходом гіроЗавдання підвищення точності стабілізації готахометра 13. Вихід датчика струму 12 підключеризонтального наведення танкового озброєння ний до п'ятого -інвертуючого входу першого сумавирішується за рахунок того, що в привід горизонтора, шостий - інвертуючий вхід якого з'єднаний з тального наведення і стабілізації танкового озбровиходом ДЛП 27. Вихід першого суматора 7 підкєння, до складу якого входять блок приціл - віддалючений до першого – додаткового входу другого лемір прилад стеження, підсилювач, суматора 8, другий - інвертуючий вхід якого з'єддиференціатор, інтегратор, два суматора, електнаний з виходом ФСГЗЗН 26. Вихід другого сумаромашинний підсилювач, виконавчий двигун, даттора 8 за допомогою послідовно підключених елечик струму, гіротахометр і об'єкт керування, наприктромашинного підсилювача 9 та виконавчого клад, у вигляді башти танка, на якому гіротахометр двигуна 10 з'єднаний із об'єктом керування 11. і блок приціл - віддалемір - прилад стеження розВихід ЕМП 9 з'єднаний з входом ФСГЗЗН 26. Вхід міщені, при цьому вихід блока приціл - віддалемір датчика струму 12 подключений до виходу компе- прилад стеження з'єднаний із об'єднаними вхонсаційної обмотки ЕМП 9. дами підсилювача, диференціатора та інтегратоВ режимі стабілізації озброєння під час прохора, виходи яких підключені відповідно до першого дження танком пересіченої місцевості за умов на, другого - і третього - додатних (неінвертуючих) явності збурюючих впливів у площині горизонтавходів першого суматора, четвертий - інвертуючий льного наведення має місце кут неузгодженості вхід якого з'єднано з виходом гіротахометра, вихід між віссю гіростабілізатора і віссю канала ствола другого суматора підключений за допомогою посгармати. Сигнал напруги, пропорційний цьому куту лідовно з'єднаних електромашинного підсилювача неузгодженості, з виходу ротора обертального і виконавчого двигуна до об'єкта керування, а витрансформатора гіростабілізатора БПВПС 1 подахід електромашинного підсилювача водночас з'єдється на об'єднані входи підсилювача 2, диференнаний із входом датчика струму, додатково введеціатора 4 і інтегратора 6, вихідні сигнали яких поні другий підсилювач і другий диференціатор, а даються відповідно на перший -, другий - і третій другому суматору надано третій - додатній вхід, додатні входи першого суматора 7, на четвертий при цьому вихід першого суматора за допомогою інвертуючий вхід якого подається сигнал, пропорпослідовно з'єднаних другого підсилювача і другоційний абсолютній швидкості обертання башти, го диференціатора підключений до першого - довиміряній гіротахометром 13. На п’ятий - інвертуюдатного входу другого суматора, а вихід другого чий вхід першого суматора 7 з виходу датчика підсилювача водночас з'єднаний із третім – додатструму 12 надходить сигнал зворотнього зв'язку за ковим входом другого суматора, другий - інвертуструмом виконавчого двигуна 10. Для компенсації ючий вхід якого з'єднаний з виходом датчика похибки, викликаної моментними збуреннями від струму. неврівноваженості башти на шостий - інвертуючий Введення другого підсилювача дозволяє підвхід першого суматора подається напруга з виходу вищити добротність внутрішнього (швидкісного ДЛП 27. Напруга з виходу першого суматора 7 охопленого зворотнім зв'язком по гіротахометру) поступає на вхід другого суматора 8, де алгебраїконтуру привода, внаслідок чого підвищується точне складається з сигналом напруги коректуючого чність стабілізації і наведення. гнучкого зворотнього зв’язку за напругою ЕМП 9, Введення другого диференціатора і включення який надходить з виходу ФСГЗЗН 26. Вихідна найого в коло між другим підсилювачем і першим пруга другого суматора 8 надходить на вхід електдодаткового входом другого суматора створює ромашинного підсилювача 9, де перетворюється у додатковий форсуючий сигнал, що компенсує одну різницю струмів, що протікають у обмотках керуіз складових інерційностей силової частини привовання. Відповідно до величини та знаку різниці да наведення і стабілізації у горизонтальній плострумів керування електромашинний підсилювач 9 щині (ЕМП-ВД), і дозволяє зберегти стійкість робовиробляє напругу, яка спричиняє до повертання ти внутрішнього контуру привода за умов башти танка виконавчим двигуном 10 у напрямку збільшення коефіцієнта підсилення, пов'язаного із зменшення неузгодженості між заданим і реальвведенням другого підсилювача. ним положеннями башти у горизонтальній площиНадання другому суматору додаткового входу ні. і подключения до другого виходом ЕМП 9, забезРозглянутий привід - прототип забезпечує депечує введення коректуючого від'ємного зворотщо більшу у порівнянні з відомими аналогами, але нього зв'язку за струмом двигуна, завдяки чому відносно невисоку точність наведення і стабілізапідвищено якісні показники внутрішнього контуру. ції. Наявність у його складі датчика лінійних присКожна із нових введених ознак є суттєвою і корень 27 обмежує можливість підвищення точнодостатньою, а сокупність введених нових ознак сті приводу-прототипу. Це пояснюється досить разом із відомими ознаками і їх зв'язок між собою значною похибкою самого датчика лінійних присспричиняє загальний взаємозв'язок усіх зазначекорень 27, а також похибкою його встановлення на них ознак вцілому, наслідком якого є можливість об'єкті керування 11, що є ще одним важливим розв'язання поставленого завдання - підвищення недоліком приводу - прототипу. точності стабілізації горизонтального наведення, 5 60862 6 що зумовлює підвищення точності стрільби в задодатковим входом другого суматора 8. Додатково даному напрямку. наданий третій - додатній вхід другого суматора 8 Співставлювальний аналіз з прототипом підтз'єднаний з виходом другого додатково введенноверджує, що привід, який заявляється, відрізняго підсилювача 3. Вихід другого суматора 8 за доється від останнього введенням додаткових блоків помогою електромашинного підсилювача 9 з'єдна-підсилювача та диференціатора і відсутністю дений з входом виконавчого двигуна, який механічно яких складових блоків прототипа - датчика лінійзв'язаний з об'єктом керування 11, наприклад, баних прискорень та формувача сигнала гнучкого штою танка, а також за допомогою зворотнього зворотнього зв'язку за напругою, а також їх зв'яззв'язку через датчик струму 12 з другим - інвертуками з іншими елементами схеми. Авторам і заявючим входом другого суматора 8. нику привід із зазначеною сукупністю ознак, що Введений другий підсилювач 3 виконаний на характеризують запропонований винахід, не була основі операційних підсилювачів 14 і 15 і шести відома раніше. Таким чином, пристрій, що заявлярезисторів - R16, R17, R18, R19, R20, R21 (див. ється, відповідає критерію винаходу «новизна». фіг.3). Вихід першого суматора 7 за допомогою Слід відзначити, що блоки підсилювача і дирезистора R16 з'єднаний з інвертуючим входом ференціатора широко відомі в техніці. операційного підсилювача 14, неінвертуючий (доОднак їх введення у схему привода стабілізадатній) вхід якого за допомогою резистора R17 ції горизонтального наведення, за умов зазначеноз'єднаний з корпусом. Вихід операційного підсилюго зв'язку з усіма іншими її елементами, а також за вача 14 за допомогою резистора R18 з'єднано з умов одночасного надання другому суматору тревласним інвертуючим входом і за допомогою ретього - додаткового входу дозволяє покращити зистора R19 - з інвертуючим входом операційного один з основних параметрів стабілізатора - точпідсилювача 15, неінвертуючий вхід якого через ність наведення і стабілізації, тобто запропоноварезистор R20 з'єднано з корпусом, а вихід - через не технічне рішення відповідає критерію «винахідрезистор 21 з'єднаний із власним інвертуючим ницький рівень» і придатне для промислового входом. Вихід операційного підсилювача 15, який застосування. Суть винаходу пояснюється кресвходить до складу підсилювача З, підключений до леннями, де: третього - додатнього входу другого суматора 8. на фіг.1 наведено структурну схему приводу Введений другий диференціатор 5 виконаний прототипа; на основі операційного підсилювача 16, трьох рена фіг.2 наведений один з варіантів структурзисторів R22, R23, R24 і конденсатора С25 (див. ної схеми запропонованого привода горизонтальфіг.3). Вихід операційного підсилювача 14, що ного наведення і стабілізації танкового озброєння; входить до складу введеного другого підсилювача на фіг.3 наведений один из варіантів схеми 3, через послідовно з'єднані резистор R22 і конконкретної реалізації введених додатково пристроденсатор С25 підключений до інвертуючого входу їв (другого підсилювача і другого диференціатора) операційного підсилювача 16, неінвертуючий вхід у складі приводу горизонтального наведення і стаякого через резистор R23 з'єднаний з корпусом, а білізації танкового озброєння. вихід -через резистор R24 - із власним інвертуюПривід горизонтального наведення і стабілізачим входом. Вихід операційного підсилювача 16 ції танкового озброєння (див. фіг.2) включає блок другого диференціатора 5 підключений до першоприціл - віддалемір - прилад стеження (БПВПС) 1, го входу другого суматора 8. два підсилювачі 2,3, два диференціатори 4,5, інтеУсі блоки та вузли привода горизонтального гратор 6, два суматори 7,8, електромашинний піднаведення і стабілізації танкового озброєння викосилювач 9, виконавчий двигун 10, об'єкт керуваннані із застосуванням серійної промислової еленя, наприклад, башту танка, 11, датчик струму 12 і ментної бази. гіротахометр 13. Виконання введених нових блоків (другого підБлок приціл - віддалемір - прилад стеження 1 і силювача 3 і другого диференціатора 5) можливе гіротахометр 13 розміщені на об'єкті керування 11. на основі серійно виготовлених промислових опеБлок приціл - віддалемір - прилад стеження 1 раційних підсилювачів, наприклад, серії 140УД7. включає до свого складу гіростабілізатор (на кресПривід горизонтального наведення і стабілізаленні не наведено), на осі зовнішньої рамки якого ції танкового озброєння (варіант, наведений на закріплений ротор обертального трансформатора, фіг.2) у режимі стабілізації працює таким чином. статор якого жорстко зв'язаний з баштою танка. Під час руху танка по пересіченій місцевості Ротор обертального трансформатора підключений під дією збурень виникає кут неузгодженості між до виходу блока приціл - далекомір - прилад стелінією візирування і віссю канала ствола гармати. ження 1. Вихід блока приціл - віддалемір - прилад Внаслідок цього з ротора обертального трансфостеження 1, в свою чергу, підключений до об'єднарматора гіростабілізатора БПВПС 1, статор якого них входів першого підсилювача 2, першого дифежорстко зв'язаний з баштою танка, на об'єднані ренціатора 4, інтегратора 6. Виходи підсилювача входи першого підсилювача 2, першого диферен2, диференціатора 4 і інтегратора 6 з'єднані відпоціатора 4 і інтегратора 6 подається сигнал, визнавідно з першим-, другим- і третім - додатковими чається напрямком неузгодженості. входами першого суматора 7. Четвертий - інверВихідні сигнали першого підсилювача 2, пертуючий вхід суматора 7 з'єднаний з виходом гірошого диференціатора 4 і інтегратора 6 подаються тахометра 13. Вихід першого суматора 7 з'єднаний відповідно на перший-, другий- і третій - додатні з послідовно включеними додатково введеними входи першого суматора 7, на четвертий - інвердругим підсилювачем З і другим диференціатором туючий вхід якого подається напруга, пропорційна 5. Вихід диференціатора 5 з'єднаний з першим абсолютній величині швидкості обертання башти, 7 60862 8 виміряна гіротахометром 13. Сумарний сигнал додатковий форсуючий сигнал, який компенсує (сигнал з виходу суматора 7) підсилюється введеодну із складових інерційностей силової частини ним другим підсилювачем 3. Підсилений сигнал з привода наведення і стабілізації в горизонтальній виходу підсилювача 3 за допомогою введеного площині (ЕМП - ВД), що дозволяє збільшити коедругого диференціатора 5 безпосередньо подафіцієнт підсилення внутрішнього контуру зазначеється відповідно на перший - і введений третій ного привода за точність стабілізації. додатні входи другого суматора 8, на другий - інСлід зазначити, що введення другого диферевертуючий вхід якого з виходу компенсаційної обнціатора і другого підсилювача дозволяє підвищимотки ЕМП 9 надходить сигнал жорсткого від'ємти точність стабілізації привода горизонтального ного зворотнього зв'язку за струмом. Вихідна наведення за умов, коли значіння моменту інерції і напруга другого суматора 8 надходить на вхід елемоменту неврівноваженості значно перевищують ктромашинного підсилювача 9, де перетворюється ті, за яких може використовуватись приводна різницю струмів, що проходять в обмотках кепрототип. рування. У відповідності до величини і знака різВипробування серійних зразків запропонованиці струмів керування електромашинний підсиного привода горизонтального наведення і стабілілювач 9 виробляє напругу, під дією якої зації танкового озброєння, які проводилися у склавиконавчий двигун 10 повертає башту танка у наді допрацьованого танкового стабілізатора 2Э42М, прямку зменшення неузгодженості між заданим і виявили, що серединну похибку стабілізації зменреальним положеннями гармати в горизонтальній шено приблизно в 1.5 раза (від 0.6мрад. До площині. 0.4мрад). Введений другий диференціатор 13 створює 9 Комп’ютерна верстка M. Клюкін 60862 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive of horizontal aiming and stabilization of tank arms
Автори англійськоюVakulenko Volodymyr Viktorovych, Korsun Valentyn Petrovych, Kralin Volodymyr Vsevolodovych, Motuz Heorhii Ivanovych, Moshnin Viktor Mykolaiovych
Назва патенту російськоюПривод горизонтального наведения и стабилизации танкового вооружения
Автори російськоюВакуленко Владимир Викторович, Корсун Валентин Петрович, Кралин Владимир Всеволодович, Мотуз Георгий Иванович, Мошнин Виктор Николаевич
МПК / Мітки
МПК: F41G 5/00
Мітки: привід, танкового, наведення, озброєння, стабілізації, горизонтального
Код посилання
<a href="https://ua.patents.su/5-60862-privid-gorizontalnogo-navedennya-i-stabilizaci-tankovogo-ozbroehnnya.html" target="_blank" rel="follow" title="База патентів України">Привід горизонтального наведення і стабілізації танкового озброєння</a>
Привід вертикального наведення і стабілізації танкового озброєння
Номер патенту: 60861
Опубліковано: 15.03.2006
Автори: Старков Юрій Володимирович, Кралін Володимир Всеволодович, Хандога Анатолій Максимович, Корсун Валентин Петрович, Положенцев В'ячеслав Васильович, Мотуз Георгій Іванович, Мошнін Віктор Миколайович
МПК: F41G 5/00
Мітки: озброєння, вертикального, танкового, стабілізації, наведення, привід
Формула / Реферат:
Даний винахід належить до нових сполук формули (І), які діють як модулятори рецептора 5НТ2C. Ці сполуки застосовують у фармацевтичних композиціях, застосування яких включає лікування ожиріння. (I)
Пристрій дозволу пострілу артилерійської системи танкового озброєння
Номер патенту: 49984
Опубліковано: 15.10.2002
Автори: Бусяк Юрій Митрофанович, Мошнін Віктор Миколайович, Бондаренко Олександр Григорович, Фролов Леонід Андрійович
МПК: F41G 3/00
Мітки: артилерійської, пострілу, пристрій, танкового, дозволу, системі, озброєння
Формула / Реферат:
Пристрій дозволу пострілу артилерійської системи танкового озброєння, що містить виконавчий елемент і послідовно з'єднані датчик помилки стабілізації гармати, блок формування попередженої координати та пороговий пристрій, який відрізняється тим, що в нього додатково введені послідовно з'єднані другий датчик помилки стабілізації гармати, другий блок формування попередженої координати, вихід якого з'єднаний з другим входом порогового пристрою,...
Пристрій наведення
Номер патенту: 43120
Опубліковано: 15.11.2001
Автори: Корольова Наталія Анатоліївна, Рачинський Олександр Петрович, Пашков Дмитро Павлович, Козелкова Марина Борисівна
МПК: G01S 1/00
Формула / Реферат:
Пристрій наведення, що містить антену, приймач, суматор, віднімальний пристрій, силовий слідкувальний привід, датчик зворотного зв'язку, причому першим входом пристрою є перший вхід антени, другим входом пристрою є перший вхід суматора, вихід приймача сполучений з першим входом суматора, вихід суматора підключений до першого виходу віднімального пристрою, другий вихід антени через датчик зворотного зв'язку приєднаний до другого входу...
Протитанкова керована ракета з лазерною системою наведення
Номер патенту: 9358
Опубліковано: 15.09.2005
Автори: Климов Сергій В'ячеславович, Слєпов Лев Іванович, Федчук Сергій Володимирович, Жук Сергій Якович, Микитюк Олександр Григорович, Дубровський Євген Миколайович
МПК: F41A 27/00
Мітки: системою, протитанкова, ракета, лазерною, керована, наведення
Формула / Реферат:
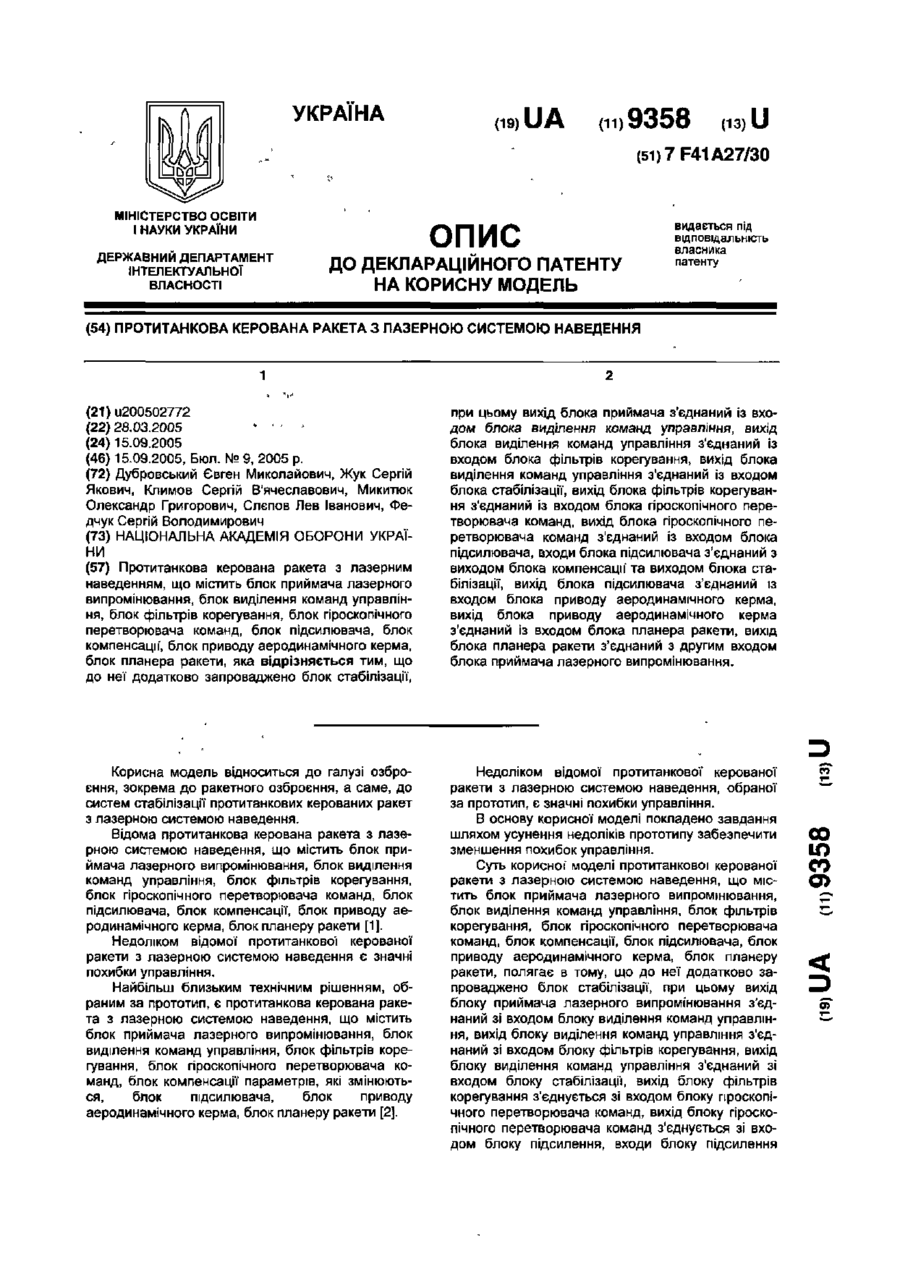
Протитанкова керована ракета з лазерним наведенням, що містить блок приймача лазерного випромінювання, блок виділення команд управління, блок фільтрів корегування, блок гіроскопічного перетворювача команд, блок підсилювача, блок компенсації, блок приводу аеродинамічного керма, блок планера ракети, яка відрізняється тим, що до неї додатково запроваджено блок стабілізації, при цьому вихід блока приймача з'єднаний із входом блока виділення...
Керований фазообертач
Номер патенту: 12457
Опубліковано: 15.02.2006
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H03H 11/02
Мітки: керований, фазообертач
Формула / Реферат:
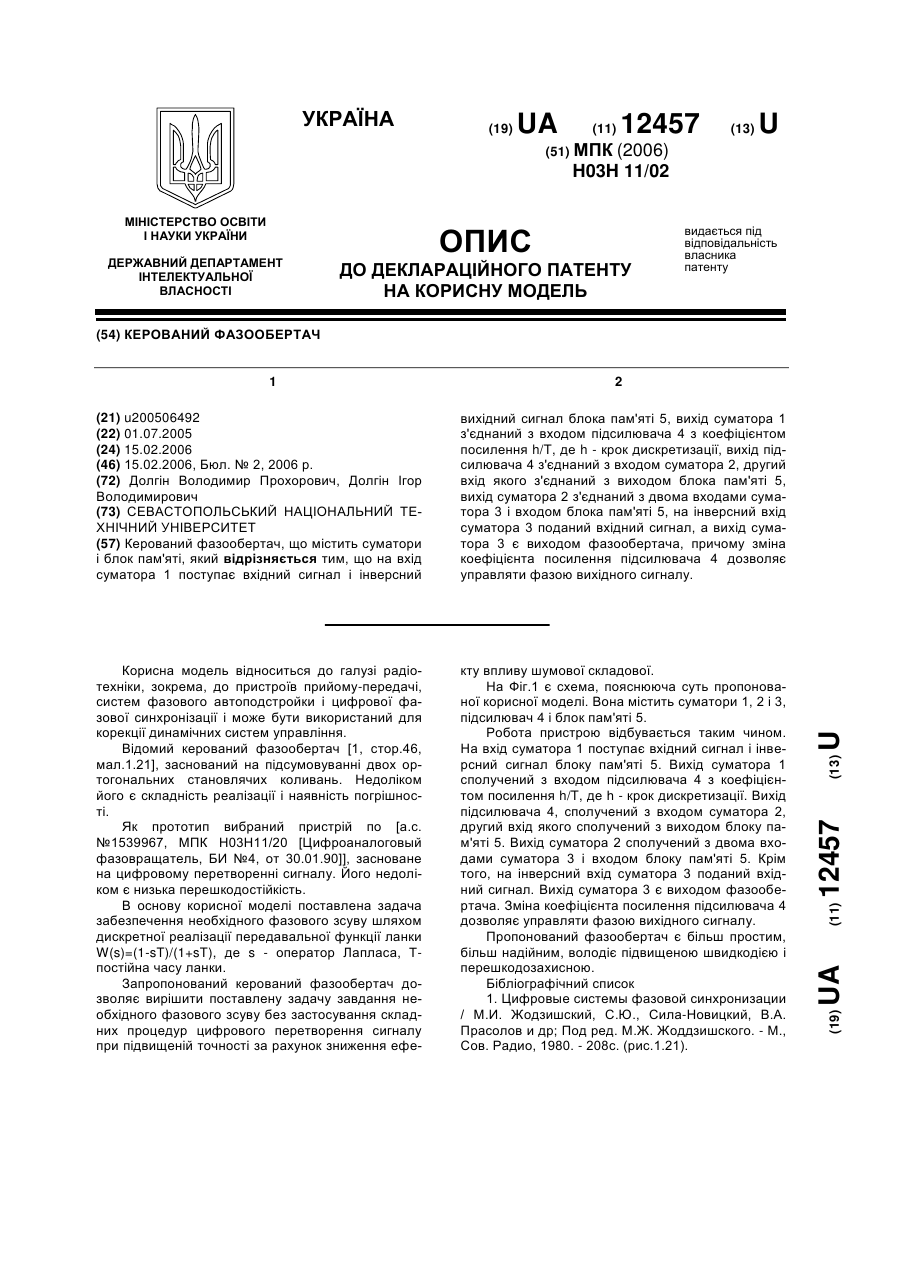
Керований фазообертач, що містить суматори і блок пам'яті, який відрізняється тим, що на вхід суматора 1 поступає вхідний сигнал і інверсний вихідний сигнал блока пам'яті 5, вихід суматора 1 з'єднаний з входом підсилювача 4 з коефіцієнтом посилення h/T, де h - крок дискретизації, вихід підсилювача 4 з'єднаний з входом суматора 2, другий вхід якого з'єднаний з виходом блока пам'яті 5, вихід суматора 2 з'єднаний з двома входами суматора 3 і...
Попередній патент: Привід вертикального наведення і стабілізації танкового озброєння
Наступний патент: Спосіб нанесення захисних елементів на компакт-диск
Випадковий патент: Печиво вівсяне