Напівавтомат для підводного зварювання і різання електродом, що плавиться
Номер патенту: 62318
Опубліковано: 25.08.2011
Автори: Пічак Володимир Григорович, Лебедєв Володимир Олександрович, Максимов Сергій Юрійович
Формула / Реферат
1. Напівавтомат для підводного зварювання і різання електродом, що плавиться, до складу якого входять механізм подачі електродного дроту з електродвигуном та редуктором, зв'язаним з валом електродвигуна, поміщені в герметичну камеру, наповнену діелектричною та змащувальною рідиною, притискні ролики з механізмом притиску, подавальні ролики, зв'язані з виходом редуктора, і котушка з електродним дротом, розміщені в загальному корпусі, а також система керування циклом роботи і система регулювання частоти обертання електродвигуна з регулятором частоти обертання вала електродвигуна і блоком живлення та джерело зварювального струму із задатчиком рівня зварювальної напруги, який відрізняється тим, що як редуктор встановлено одноступінчастий планетарний редуктор, водило якого оснащене щонайменше двома лопатями, крім того, до складу напівавтомата додатково уведений погоджувальний елемент.
2. Напівавтомат за п. 1, який відрізняється тим, що як електродвигун встановлено електродвигун постійного струму з низькою номінальною частотою обертання вала.
3. Напівавтомат за п. 1-2, який відрізняється тим, що блок живлення виконаний двокаскадним, при цьому перший каскад виконаний нерегульованим і підключений до входу системи керування циклом роботи, а другий каскад виконаний з регульованим по напрузі виходом, котрий підключений до входу системи регулювання частоти обертання електродвигуна постійного струму і задатчика рівня зварювальної напруги, причому один з виходів блока живлення, один із входів системи регулювання частоти обертання електродвигуна з додатково уведеним погоджувальним елементом, а також один вивід електродвигуна об'єднані.
Текст
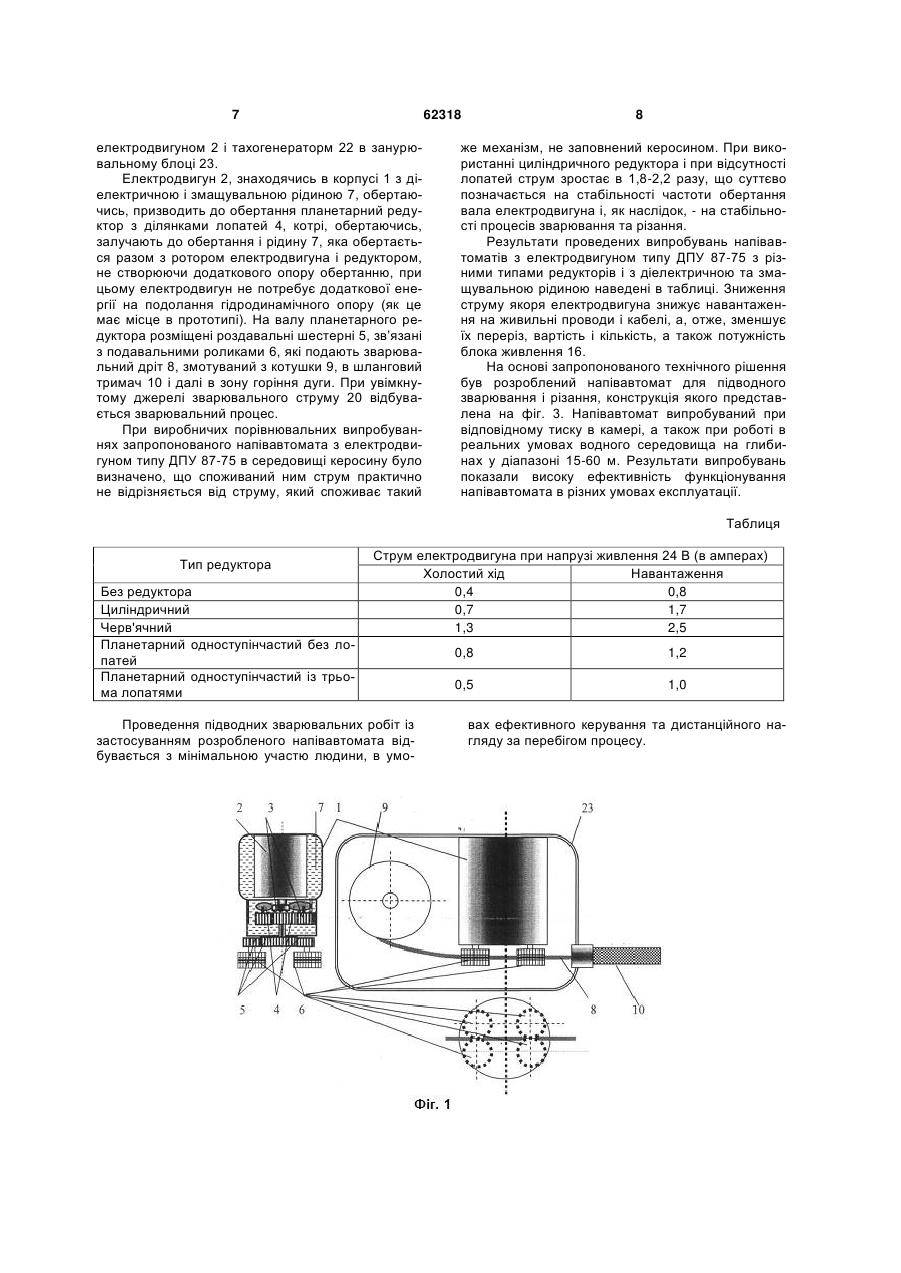
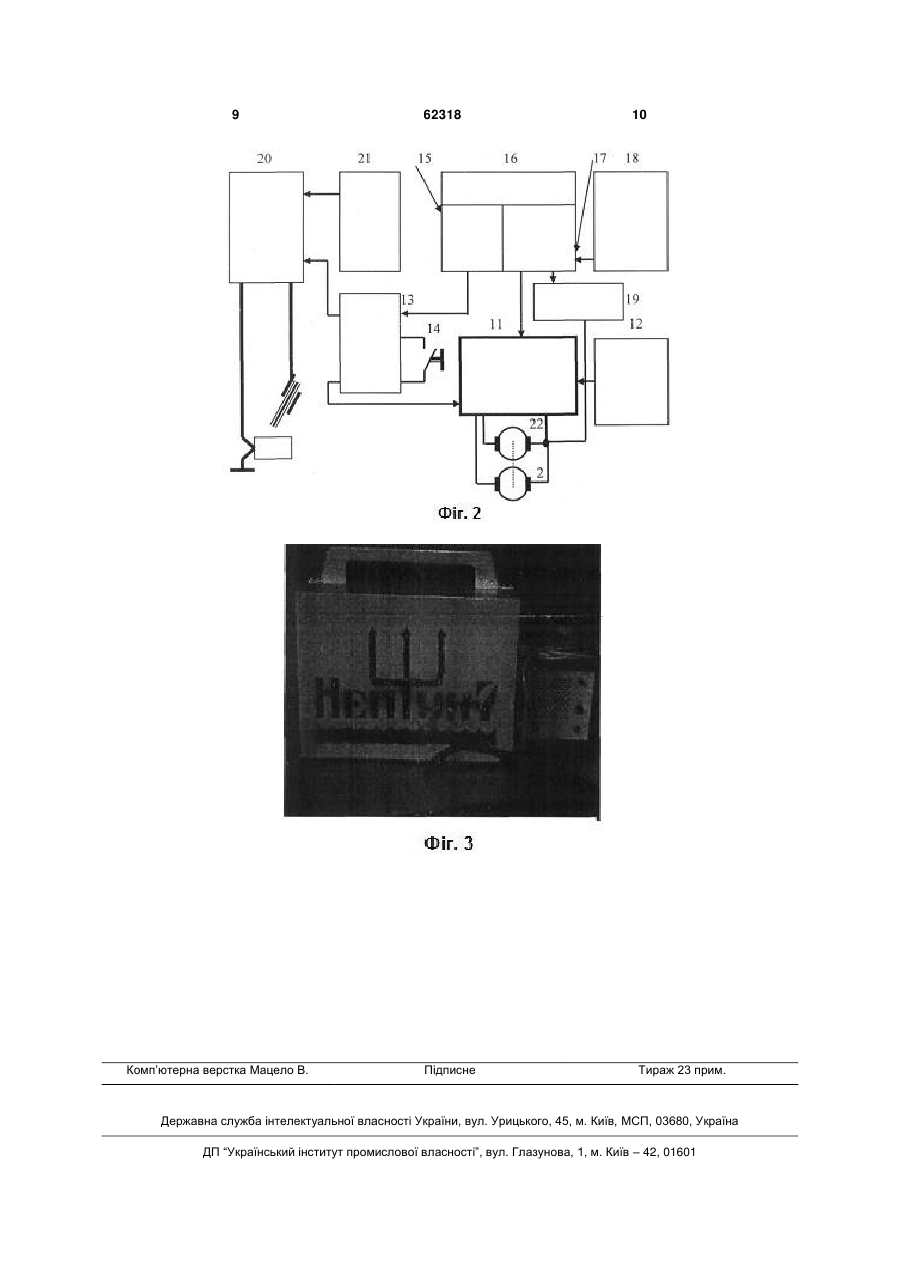
1. Напівавтомат для підводного зварювання і різання електродом, що плавиться, до складу якого входять механізм подачі електродного дроту з електродвигуном та редуктором, зв'язаним з валом електродвигуна, поміщені в герметичну камеру, наповнену діелектричною та змащувальною рідиною, притискні ролики з механізмом притиску, подавальні ролики, зв'язані з виходом редуктора, і котушка з електродним дротом, розміщені в загальному корпусі, а також система керування циклом роботи і система регулювання частоти обертання електродвигуна з регулятором частоти обертання вала електродвигуна і блоком живлення та джерело зварювального струму із задатчиком рівня зва U 2 (19) 1 3 надходженню води всередину корпуса. Основним недоліком такого напівавтомата є громіздкість, практична відсутність оперативного доступу до системи подачі, а також необхідність оснащення напівавтомата комплексом устаткування для подачі газу в герметичний корпус. 9 В а.с. № 2346792 (МПК : В32К9/16, опубл.20.02.2009) описана установка для підводного напівавтоматичного зварювання в середовищі захисних газів, до складу якої входить джерело зварювального струму, блок подавання зварювального дроту та робоча камера, що має форму відкритого водолазного колокола, обладнаного системою вентиляції. Камера виконана з можливістю герметизації з боку виробу і розміщення в ній оператора, який здійснює зварювальні роботи. Основним недоліком цієї установки є її громіздкість та невисока надійність через досить високий ступінь ризику розгерметизації. Відомий також пристрій для підводного зварю2 вання, представлений в а.с. № 256914 (МПК : В32К31/00, опубл.25.06.1976, Бюл. № 25), який містить електродвигун, редуктор, котушку з дротом, подавальні ролики та тримач. Електродвигун та редуктор цього пристрою розміщені в герметичному корпусі, який сполучається з еластичним резервуаром, заповненим повітрям. Як і в попередньому випадку, недоліком цього пристрою є громіздкість, причиною якої є наявність у складі пристрою камери (балона), яка забезпечує необхідний рівень протитиску в герметичному корпусі. За прототип корисної моделі прийнятий напівавтомат для підводного зварювання і різання електродом, що плавиться, до складу якого входять механізм подачі електродного дроту з електродвигуном та редуктором, зв'язаним з валом електродвигуна, поміщені в герметичну камеру, наповнену діелектричною та змащувальною рідиною, притискні ролики з механізмом притиску, подавальні ролики, зв'язані з виходом редуктора, і котушка з електродним дротом, розміщені в загальному корпусі, а також система керування циклом роботи і система регулювання частоти обертання електродвигуна з регулятором частоти обертання вала електродвигуна і блоком живлення, та джерело зварювального струму із задатчиком рівня зварювальної напруги (В.Я. Кононенко. «Разработки ИЭС им. Е.О. Патона в области подводной сварки и резки», журнал «Автоматическая сварка», №3, 2004 г. с.47-55). Недоліком цього напівавтомата є те, що підводний робочий процес відбувається в умовах, за яких величина струму в ланцюзі двигуна є невиправдано високою, причиною чого є значний момент опору на валу двигуна. В свою чергу, така величина моменту на валу двигуна є типовим наслідком, характерним для конструктивної побудови класичного шестишестерного циліндричного редуктора, яким обладнаний відомий напівавтомат. Шестерні цього редуктора, постійно перебуваючи в контакті з оточуючою рідиною і, взаємодіючи з нею, при обертанні зазнають значного опору з боку рідини, що і призводить до згаданих наслідків. До недоліків пристрою слід також віднести проблематичність його використання у випадках, 62318 4 коли блок живлення знаходиться на значній відстані від нього. У цьому разі через значну довжину з'єднувальних кабелів матиме місце зростання активного опору між системою регулювання частоти обертання електродвигуна і самим електродвигуном, що в кінцевому результаті призведе до зниження напруги на якорі електродвигуна і погіршення його регулювальних характеристик через зміну поєднання індуктивного і активного опору в ланцюзі якоря електродвигуна. Перелік недоліків відомого напівавтомата доповнює наявність у ньому численних проводів та кабелів керування, які з'єднують основні конструктивні вузли та елементи, що в цілому є фактором зниження надійності пристрою, незручності у користуванні та підвищення його вартості. В основу корисної моделі поставлена задача підвищення ефективності роботи та спрощення конструкції напівавтомата для підводного зварювання і різання електродом, що плавиться, шляхом удосконалення його конструктивного виконання, зокрема, шляхом встановлення в ньому одноступінчастого планетарного редуктора з лопатями, оснащення його погоджувальним елементом та двокаскадним блоком живлення з нерегульованим та регульованим каскадами, а також оптимізації взаємозв'язку між його основними конструктивними елементами, що забезпечує втягування діелектричної і змащувальної рідини в обертовий рух шестерень редуктора, і, як наслідок цього, - зменшення моменту опору руху на валу двигуна і зниження струму його ланцюгів, досягається можливість зниження активного опору між електродвигуном та системою регулювання частоти його обертання, і тим самим - можливість скорочення задіяних в робочому процесі з’єднувальних кабелів та покращення регулювальних характеристик електродвигуна. Поставлена задача вирішується тим, що в напівавтоматі для підводного зварювання і різання електродом, що плавиться, до складу якого входять механізм подачі електродного дроту з електродвигуном та редуктором, зв'язаним з валом електродвигуна, поміщені в герметичну камеру, наповнену діелектричною та змащувальною рідиною, притискні ролики з механізмом притиску, подавальні ролики, зв'язані з виходом редуктора, і котушка з електродним дротом, розміщені в загальному корпусі, а також система керування циклом роботи і система регулювання частоти обертання електродвигуна з регулятором частоти обертання вала електродвигуна і блоком живлення, та джерело зварювального струму із задатчиком рівня зварювальної напруги, згідно з корисною моделлю, як редуктор встановлений одноступінчастий планетарний редуктор, водило якого оснащене щонайменше двома лопатями, крім того, до складу напівавтомата додатково уведений погоджувальний елемент. При цьому як електродвигун встановлений електродвигун постійного струму з низькою номінальною частотою обертання вала, блок живлення виконаний двокаскадним, причому перший каскад виконаний нерегульованим і підключений до входу системи керування циклом роботи, а другий каскад виконаний з регульованим 5 по напрузі виходом, котрий підключений до входу системи регулювання частоти обертання електродвигуна постійного струму і задатчика рівня зварювальної напруги, а один з виходів блока живлення, один із входів системи регулювання частоти обертання електродвигуна з додатково уведеним погоджувальним елементом, а також один вивід електродвигуна об'єднані. Зазначений вище технічний результат, що має місце в процесі експлуатації запропонованого напівавтомата, обумовлений ознаками, які відрізняють його від ознак пристрою, описаного в прототипі. Так, встановлення в ньому одноступінчастого планетарного редуктора з лопатями створює найбільш сприятливі умови для плавного та безперешкодного обертання шестерень в порожнині герметичної камери, наповненої діелектричною і змащувальною рідиною. Лопаті редуктора в процесі свого обертання захвачують і змушують обертатись оточуючу рідину, забезпечуючи тим самим мінімальний опір для обертання шестерень в рідкому середовищі. За таких умов суттєво знижується момент опору руху на валу двигуна, струм в його ланцюзі істотно знижується, при цьому к.к.д двигуна підвищується. Відмінністю запропонованого напівавтомата у порівнянні з відомим є варіант двокаскадного виконання блока живлення з нерегульованим та регульованим каскадами. Саме завдяки останньому досягається можливість експлуатації напівавтомата на значних відстанях від блока живлення без ризику зростання активного опору між системою регулювання частоти обертання електродвигуна і електродвигуном. Застосування регульованого каскаду унеможливлює зниження напруги на якорі електродвигуна, а, значить, і погіршення його регулювальних характеристик. Ця обставина суттєво розширює функціональні можливості напівавтомата. Додатково уведений до складу напівавтомата погоджувальний елемент у поєднанні із запропонованою формою конструктивного зв’язку між його основними елементами, а саме - об'єднанні одного з виходів блока живлення, одного із входів системи регулювання частоти обертання електродвигуна, а також одного виводу електродвигуна забезпечує зниження числа проводів, які з'єднують занурювальний блок із блоком живлення. Це значно спрощує конструктивну побудову напівавтомата у порівнянні з описаним у прототипі, надає йому підвищеної надійності у роботі, знижує його вартість. Дане технічне рішення представлене кресленнями, на яких зображено: на фіг. 1 - конструкція напівавтомата для підводного зварювання і різання; на фіг. 2 - структурна електрична схема напівавтомата; на фіг. 3 - зовнішній вигляд напівавтомата. У корпусі 1, заповненому діелектричною та змащувальною рідиною, розміщений електродвигун 2, на валу якого встановлений одноступінчастий планетарний редуктор 3 з лопатями 4. На валу редуктора 3 встановлені роздавальні шестерні 5, 62318 6 які зв'язані з парами подавальних і притискних роликів 6. Цифрою 7 позначена діелектрична і змащувальна рідина, якою заповнений корпус 1. Електродний дріт 8, що змотується з котушки (касети) 9, через шланговий тримач 10 роликами 6 подається в зону зварювання. Частота обертання двигуна регулюється системою регулювання частоти обертання електродвигуна 11 (див. фіг. 2). Позицією 23 на фіг. 1 позначений занурювальний блок. Частота обертання вала електродвигуна 2 задається і регулюється регулятором частоти обертання вала електродвигуна 12 (фіг. 2). Цикл роботи напівавтомата здійснюється системою керування циклом роботи 13, що управляється кнопкою 14. Живлення системи 13 здійснюється від нерегульованого каскаду 15 блока живлення 16. Живлення системи 11 здійснюється від регульованого каскаду 17, рівень вихідної напруги якого задається регулятором вихідної напруги регульованого каскаду 18. Один з виходів регульованого каскаду 17 блока живлення 16, один із входів системи регулювання 11 з додатково уведеним погоджувальним елементом 19, а також вивід електродвигуна 2 об'єднані. На фіг. 2 додатково показані джерело зварювального струму 20 із задатчиком рівня зварювальної напруги 21, які беруть участь у робочому циклі напівавтомата. Цифрою 22 позначений датчик частоти обертання вала електродвигуна 2. Напівавтомат для підводного зварювання і різання електродом, що плавиться, працює у такий спосіб: механізм подачі з електродвигуном 2 та задатчиком частоти обертання вала електродвигуна (тахогенератором) 22 перебуває в зануреному стані. При вмиканні пускової кнопки 14 вмикається система керування циклом роботи 13, котра, в свою чергу, вмикає джерело зварювального струму 20 і систему 11 регулювання частоти обертання вала електродвигуна 2 з тахогенератором 22. При цьому система керування циклом роботи 13 одержує живлення від нерегульованого каскаду 15 блока живлення 16, а система 11 регулювання частоти обертання вала електродвигуна - від регульованого каскаду 17. Частота обертання вала електродвигуна 2 визначається системою регулювання 11 і задається як регулятором 12 частоти обертання вала електродвигуна, так і регульованим каскадом 17 блока живлення 16 з використанням регулятора вихідної напруги 18. Регулювання каскаду 17 здійснюється у разі зміни довжини кабельного зв’язку між системою 11 регулювання частоти обертання вала електродвигуна і електродвигуном 2 і визначається глибиною занурення блока 23. Тахогенератор 22, зв’язаний з валом електродвигуна 2, являє собою датчик частоти обертання електродвигуна і його сигнал вводиться в блок системи регулювання, забезпечуючи стабілізацію частоти обертання вала електродвигуна. Живлення електродвигуна 2 від регульованого каскаду 17 здійснюється через погоджувальний елемент 19, який дозволяє об’єднувати ланцюги тахогенератора 22 і електродвигуна 2, і тим самим скорочувати кількість зв’язків між системою 11 та 7 62318 електродвигуном 2 і тахогенераторм 22 в занурювальному блоці 23. Електродвигун 2, знаходячись в корпусі 1 з діелектричною і змащувальною рідиною 7, обертаючись, призводить до обертання планетарний редуктор з ділянками лопатей 4, котрі, обертаючись, залучають до обертання і рідину 7, яка обертається разом з ротором електродвигуна і редуктором, не створюючи додаткового опору обертанню, при цьому електродвигун не потребує додаткової енергії на подолання гідродинамічного опору (як це має місце в прототипі). На валу планетарного редуктора розміщені роздавальні шестерні 5, зв’язані з подавальними роликами 6, які подають зварювальний дріт 8, змотуваний з котушки 9, в шланговий тримач 10 і далі в зону горіння дуги. При увімкнутому джерелі зварювального струму 20 відбувається зварювальний процес. При виробничих порівнювальних випробуваннях запропонованого напівавтомата з електродвигуном типу ДПУ 87-75 в середовищі керосину було визначено, що споживаний ним струм практично не відрізняється від струму, який споживає такий 8 же механізм, не заповнений керосином. При використанні циліндричного редуктора і при відсутності лопатей струм зростає в 1,8-2,2 разу, що суттєво позначається на стабільності частоти обертання вала електродвигуна і, як наслідок, - на стабільності процесів зварювання та різання. Результати проведених випробувань напівавтоматів з електродвигуном типу ДПУ 87-75 з різними типами редукторів і з діелектричною та змащувальною рідиною наведені в таблиці. Зниження струму якоря електродвигуна знижує навантаження на живильні проводи і кабелі, а, отже, зменшує їх переріз, вартість і кількість, а також потужність блока живлення 16. На основі запропонованого технічного рішення був розроблений напівавтомат для підводного зварювання і різання, конструкція якого представлена на фіг. 3. Напівавтомат випробуваний при відповідному тиску в камері, а також при роботі в реальних умовах водного середовища на глибинах у діапазоні 15-60 м. Результати випробувань показали високу ефективність функціонування напівавтомата в різних умовах експлуатації. Таблиця Тип редуктора Без редуктора Циліндричний Черв'ячний Планетарний одноступінчастий без лопатей Планетарний одноступінчастий із трьома лопатями Струм електродвигуна при напрузі живлення 24 В (в амперах) Холостий хід Навантаження 0,4 0,8 0,7 1,7 1,3 2,5 Проведення підводних зварювальних робіт із застосуванням розробленого напівавтомата відбувається з мінімальною участю людини, в умо 0,8 1,2 0,5 1,0 вах ефективного керування та дистанційного нагляду за перебігом процесу. 9 Комп’ютерна верстка Мацело В. 62318 Підписне 10 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSemiautomatic device for underwater cutting and welding by consumable electrode
Автори англійськоюLebediev Volodymyr Oleksandrovych, Maksymov Serhii Yuriiovych, Pichak Volodymyr Hryhorovych
Назва патенту російськоюПолуавтомат для подводной сварки и резки плавящимся электродом
Автори російськоюЛебедев Владимир Александрович, Максимов Сергей Юрьевич, Пичак Владимир Григорьевич
МПК / Мітки
МПК: B23K 9/16
Мітки: різання, плавиться, електродом, зварювання, підводного, напівавтомат
Код посилання
<a href="https://ua.patents.su/5-62318-napivavtomat-dlya-pidvodnogo-zvaryuvannya-i-rizannya-elektrodom-shho-plavitsya.html" target="_blank" rel="follow" title="База патентів України">Напівавтомат для підводного зварювання і різання електродом, що плавиться</a>
Спосіб дугового зварювання електродом, що плавиться
Номер патенту: 84237
Опубліковано: 25.09.2008
Автори: Носовський Борис Іванович, Ковалевський Олексій Ігорович
МПК: B23K 9/12
Мітки: плавиться, дугового, зварювання, електродом, спосіб
Формула / Реферат:
1. Спосіб дугового зварювання електродом, що плавиться, який включає подачу електрода за допомогою приводних роликів і зварювального пальника і примусовий перенос електродного металу в зварювальну ванну, який відрізняється тим, що примусовий перенос електродного металу здійснюють за рахунок коливань за синусоїдальним законом механічного контуру, у нижній частині якого розташовують електрод, що плавиться, а верхню частину виконують з обмоткою,...
Пристрій для зварювання електродом, що плавиться
Номер патенту: 4538
Опубліковано: 28.12.1994
Автори: Лендел Володимир Іванович, Потап'євський Аркадій Григорович, Дудко Данило Андрійович, Рубіна Віра Олексіївна, Ромочевський Іван Федорович
МПК: B23K 9/173
Мітки: пристрій, плавиться, зварювання, електродом
Формула / Реферат:
1. Устройство для сварки плавящимся електродом, содержащее мундштук, газоподвод, кнопку управления, соединенную с проводами управления, гибкий шланг, выполненный с наружной защитной неэлектропроводной оболочкой, внутренней частью со сменной спиралью, концевыми соединительными узлами, имеющими отверстия для газа, отличающееся тем, что наружная оболочка шланга выполнена с периметром внутренней поверхности не менее, чем на 3 мм большим...
Спосіб дугового зварювання електродом, що плавиться

Номер патенту: 24440
Опубліковано: 16.07.2001
Автори: Носовський Михайло Борисович, Носовський Борис Іванович
МПК: B23K 9/12
Мітки: зварювання, спосіб, плавиться, дугового, електродом
Формула / Реферат:
Способ дуговой сварки плавящимся электродом, при котором электродную проволоку с помощью приводных роликов и сварочной горелки подают в сварочную ванну, отличающийся тем, что электродную проволоку изгибают по синусоидальному закону в зоне между приводными роликами и горелкой симметрично относительно оси, и в момент уменьшения пульсирующего напряжения сварочной дуги до нуля, преобразуют синусоидальные колебания электродной проволоки в...
Пальник для дугового зварювання електродом, що не плавиться
Номер патенту: 18581
Опубліковано: 25.12.1997
Автори: Кіпернік Юхим Григорійович, Остапов Анатолій Васильович, Карпов Олег Петрович, Дьогтяр Володимир Іванович, Гізер Борис Васильович, Скріпачук Валерій Іванович
МПК: B23K 9/167
Мітки: електродом, плавиться, пальник, зварювання, дугового
Формула / Реферат:
Горелка для дуговой сварки неплавящимся электродом в среде защитных газов, содержащая соосно размещенный в полом корпусе электрододержатель, механизм осевого перемещения электрододержателя, токоподвод, отличающаяся тем, что она снабжена дополнительным токоподводом с нихромовой спиралью, электрододержатель выполнен с токосъемным буртом на нерабочем торце, полый корпус выполнен из электроизоляционного материала и с клиньями в его полости,...
Спосіб дугового зварювання електродом, що плавиться
Номер патенту: 4163
Опубліковано: 27.12.1994
Автори: Потап'євський Аркадій Григорович, Худяков Вячеслав Іванович, Гейдеріх Отто Павлович
МПК: B23K 9/127
Мітки: спосіб, дугового, зварювання, плавиться, електродом
Формула / Реферат:
Способ дуговой сварки плавящимся электродом, при котором питание сварочной дуги осуществляют от источника, имеющего в диапазоне рабочих режимов сварки крутопадающую внешнюю вольт-амперную характеристику, отличающийся тем, что при повышении напряжения дуги на величину от 15% до 20% выше заданного рабочего напряжения, питание дуги осуществляю г в режиме пологопадающей или жесткой внешней вольтамперной характеристики источника питания.
Попередній патент: Спосіб хірургічної профілактики дисрегенерацій при свіжих переломах кісток передпліччя
Наступний патент: Спосіб демонтажу секцій кріплення
Випадковий патент: Спосіб одержання сірчанокислого каталізатора