Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 63867
Опубліковано: 15.01.2004
Автори: Рогов Петро Дмитрович, Копитко Ігор Йосипович, Ільченко Михайло Юхимович, Левшенко Олександр Семенович, Якорнов Євгеній Аркадійович

Формула / Реферат
1. Система для супроводження рухомих об'єктів з використанням глобальної супутникової системи радіонавігації, що містить супроводжуваний рухомий об'єкт з GPS-датчиком, що приймає й обробляє сигнали штучних супутників Землі глобальної супутникової системи радіонавігації, які попадають у ширококутову діаграму направленості його антени, радіомодемом, вхід якого зв'язаний з виходом GPS-датчика, лінії зв'язку, на які надходять сигнали з виходу радіомодема, і центральний пост у складі робочої станції, яка складається з каскадно з'єднаних приймача з датчиком команд і пристрою обробки і індикатора, з'єднаного по входу з пристроєм обробки, другий вихід якого з'єднаний з приймачем з датчиком команд, яка відрізняється тим, що в неї додатково введені в супроводжуваний рухомий об'єкт дві розріджені лінійні антенні решітки, п'ять комутаторів, чотири настроювальних атенюатори, чотири поглинаючих балансних навантаження, два суматори, два мостових суматори, два регульованих фазообертачі, два атенюатори, направлений відгалужувач, логічний елемент, виконавчий пристрій з 2...N командними виходами і радіодатчик, а в центральний пост - блок управління, вхід якого з'єднаний з третім виходом пристрою обробки, а вихід з'єднаний з другим входом приймача з датчиком команд, причому перший і третій виходи першої триелементної по входу лінійної розрідженої антенної решітки через перший і другий настроювальні атенюатори з'єднані з першим і другим входами першого суматора, а другий вихід з'єднаний з першим входом першого комутатора, перший вихід якого з'єднаний зі входом GPS-датчика і першим виходом другого комутатора, другий вихід першого суматора з'єднаний з першим поглинаючим балансним навантаженням, перший вихід першого суматора з'єднаний зі входом першого регульованого фазообертача, вихід якого з'єднаний з першим входом першого мостового суматора, другий вихід першого комутатора з'єднаний з входом першого регульованого атенюатора, вихід якого з'єднаний з другим входом першого мостового суматора, перший вихід першого мостового суматора з'єднаний з першим входом виконавчого пристрою, вихід якого з'єднаний з другими входами управління положенням першого і другого комутаторів, другий вихід першого мостового суматора з'єднаний з першим входом другого комутатора, другий вихід якого з'єднаний з третім поглинаючим балансним навантаженням, центральний вхід другої лінійної розрідженої антенної решітки через її центральний вихід з'єднаний зі входом другого регульованого атенюатора, а ![]() ,
, ![]() , входів через відповідні виходи
, входів через відповідні виходи ![]() та
та ![]() лінійної розрідженої антенної решітки з'єднані з входами четвертого і п'ятого комутаторів, виходи яких через третій і четвертий настроювальні атенюатори з'єднані з першим і другим входами другого суматора, другий вихід якого з'єднаний з четвертим поглинаючим балансним навантаженням, а перший вихід з'єднаний зі входом другого регульованого фазообертача, вихід фазообертача з'єднаний з першим входом другого мостового суматора, перший вихід якого з'єднаний з третім входом виконавчого пристрою, вихід другого регульованого атенюатора з'єднаний з першим входом направленого відгалужувача, перший вихід якого з'єднаний з першим входом третього комутатора, а другий вихід з'єднаний з другим поглинаючим балансним навантаженням, другий вхід третього комутатора з'єднаний з першим виходом радіомодема, а третій його вхід з'єднаний з другим входом другого мостового суматора, другий вихід якого з'єднаний з другим входом-виходом радіомодема; третій вихід направленого відгалужувача з'єднаний з другим входом логічного елемента, перший вихід якого з'єднаний з входом управління комутацією третього комутатора, а другий вихід з'єднаний з входами управління четвертого і п'ятого комутаторів, перший вхід логічного елемента з'єднаний з другим виходом радіомодема і четвертим входом виконавчого пристрою, другий вхід якого з'єднаний з першим виходом радіомодема, п'ятий вхід виконавчого пристрою з'єднаний з третім виходом радіомодема, перший вихід виконавчого пристрою з'єднаний з входом радіодатчика, а його 2...N командних виходів відповідно з'єднані з управляючими входами всіх регульованих атенюаторів і фазообертачів.
лінійної розрідженої антенної решітки з'єднані з входами четвертого і п'ятого комутаторів, виходи яких через третій і четвертий настроювальні атенюатори з'єднані з першим і другим входами другого суматора, другий вихід якого з'єднаний з четвертим поглинаючим балансним навантаженням, а перший вихід з'єднаний зі входом другого регульованого фазообертача, вихід фазообертача з'єднаний з першим входом другого мостового суматора, перший вихід якого з'єднаний з третім входом виконавчого пристрою, вихід другого регульованого атенюатора з'єднаний з першим входом направленого відгалужувача, перший вихід якого з'єднаний з першим входом третього комутатора, а другий вихід з'єднаний з другим поглинаючим балансним навантаженням, другий вхід третього комутатора з'єднаний з першим виходом радіомодема, а третій його вхід з'єднаний з другим входом другого мостового суматора, другий вихід якого з'єднаний з другим входом-виходом радіомодема; третій вихід направленого відгалужувача з'єднаний з другим входом логічного елемента, перший вихід якого з'єднаний з входом управління комутацією третього комутатора, а другий вихід з'єднаний з входами управління четвертого і п'ятого комутаторів, перший вхід логічного елемента з'єднаний з другим виходом радіомодема і четвертим входом виконавчого пристрою, другий вхід якого з'єднаний з першим виходом радіомодема, п'ятий вхід виконавчого пристрою з'єднаний з третім виходом радіомодема, перший вихід виконавчого пристрою з'єднаний з входом радіодатчика, а його 2...N командних виходів відповідно з'єднані з управляючими входами всіх регульованих атенюаторів і фазообертачів.
Текст
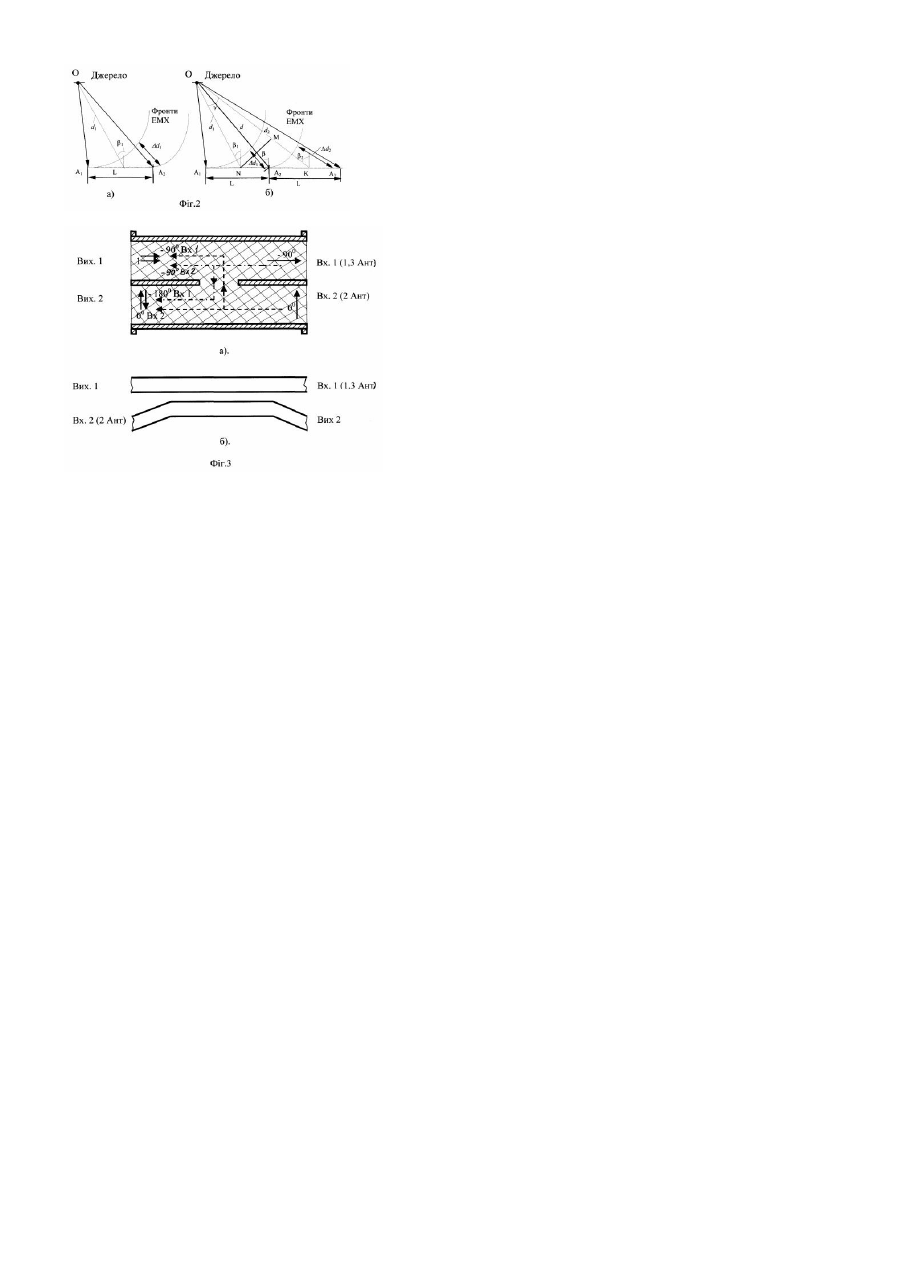
Винахід відноситься до радіоелектроніки, а саме до систем диспетчеризації рухомих об'єктів, які використовують глобальну супутникову систему радіонавігації, і може бути застосований для контролю переміщення і супроводження інкасаторських і патрульних машин, машин екстренної допомоги та інших рухомих об'єктів спеціального призначення, для дистанційного виявлення несанкціонованого відкриття (викрадення) службових і приватних транспортних засобів. Відома система для визначення місцезнаходження рухомих об'єктів, а саме, транспортних засобів, що використовує глобальну навігаційну систему GPS-суп утників 1, 2, 3, 4 на полярних орбітах, сигнали яких з допомогою встановленого на рухомому об'єкті GPS-приймача дозволяють визначити їх миттєве місцезнаходження і координати (див. заявка РСТ №93/09446, кл. G01S5/14, 5/00, 1993). Для підвищення точності визначення координат рухомого об'єкта у відомій системі введено щонайменше ще один опорний GPS-приймач, координати місцезнаходження якого точно відомі. Недоліком відомої системи є те, що вартість апаратури формування диференційних поправок на основі даних опорного приймача на декілька порядків вища за вартість самого GPS-приймача. Відома система супроводження рухомих об'єктів, що використовує сигнали штучни х суп утників Землі (ШСЗ) глобальної супутникової системи радіонавігації, яка на відміну від попередньої системи дозволяє визначати місцезнаходження декількох рухомих об'єктів завдяки періодичному стробуванню сигналів GPS-приймачів у заданому часовому вікні і наявності пристрою обробки, який знаходиться в центральному пункті, причому швидкість передачі даних на пристрій обробки по каналу передачі нижча, ніж швидкість стробування сигналів GPS-приймача (див. заявка ЕПВ №0545636, кл. G01S5/00, 5/14, 1994). Недоліком відомої системи є невисока точність визначення місцезнаходження супроводжуваних рухомих об'єктів із-за використання опорного GPSприймача. Найбільш близькою по технічній сутності до заявляємої системи є система супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації (див. заявка ЕПВ №0512789, кл. G01S5/14, 5/00, 1993). Відома система супроводження рухомих об'єктів, вибрана в якості прототипу, містить центральний пост у складі робочої станції, яка складається з каскадно з'єднаних приймача з датчиком команд і пристрою обробки, і індикатора, з'єднаного по входу з пристроєм обробки, другий вихід якого з'єднаний з приймачем з датчиком команд, супроводжуваний рухомий об'єкт з GPS-датчиком, що приймає й обробляє сигнали ШСЗ глобальної супутникової системи радіонавігації, які попадають у ширококутову діаграму направленості його антени, радіомодемом, вхід якого зв'язаний з виходом GPS-датчика, ліній зв'язку, на які надходять сигнали з виходу радіомодема. Недоліком відомої системи є відсутність технічних рішень, які пов'язані з протиугонними заходами і несанкціонованими відкриттями рухомих транспортних засобів, а саме відсутність завадозахисту як по каналу зв'язку, так і по GPS-датчику. Технічною задачею, на вирішення якої спрямований винахід, є підвищення завадозахисту супроводжуваного транспортного засобу шляхом дискримінації джерел радіозавад, які знаходяться в безпосередній близькості від нього, а також виявлення супроводжуваного рухомого об'єкта у випадку його викрадення по випромінюванню спеціального радіодатчика і блокування руху з центрального поста. Поставлена задача вирішується тим, що в систему для супроводження рухомих об'єктів з використанням глобальної супутникової системи радіонавігації, яка містить супроводжуваний рухомий об'єкт з GPS-датчиком, що приймає й обробляє сигнали ШСЗ глобальної супутникової системи радіонавігації, які попадають у ширококутову діаграму направленості його антени, радіомодемом, вхід якого зв'язаний з виходом GPS-датчика, ліній зв'язку, на які надходять сигнали з виходу радіомодема і центральний пост у складі робочої станції, яка складається з каскадно з'єднаних приймача з датчиком команд і пристрою обробки, і індикатора, з'єднаного по входу з пристроєм обробки, другий вихід якого з'єднаний з приймачем з датчиком команд, введено в супроводжуваний рухомий об'єкт дві розріджені лінійні антенні решітки, п'ять комутаторів, чотири настроювальних атенюатори, чотири поглинаючих балансних навантаження, два суматори, два мостових суматори, два регульованих фазообертачі, два атенюатори, направлений відгалужувач, логічний елемент, виконавчий пристрій з 2...N командними виходами і радіодатчик, а в центральний пост -блок управління, вхід котрого з'єднаний з третім виходом пристрою обробки, а вихід - з другим входом приймача з датчиком команд. При цьому перший і третій виходи першої трьохелементної по входу лінійної розрідженої антенної решітки через перший і другий настроювальні атенюатори з'єднані з першим і другим входами першого суматора, а другий ви хід - з першим входом першого комутатора, перший вихід котрого з'єднаний зі входом GPS-датчика і першим виходом другого комутатора, другий вихід першого суматора з'єднаний з першим поглинаючим балансним навантаженням; перший вихід першого суматора з'єднаний зі входом першого регульованого фазообертача, вихід котрого з'єднаний з першим входом першого мостового суматора; другий ви хід першого комутатора з'єднаний зі входом першого регульованого атенюатора, вихід котрого з'єднаний з другим входом першого мостового суматора; перший вихід першого мостового суматора з'єднаний з першим входом виконавчого пристрою, вихід котрого з'єднаний з другими входами управління положенням першого і другого комутаторів; другий ви хід першого мостового суматора з'єднаний з першим входом другого комутатора, другий ви хід котрого з'єднаний з третім поглинаючим балансним навантаженням; центральний вхід другої лінійної розрідженої антенної решітки через її центральний вихід з'єднаний зі входом другого регульованого атенюатора, а i = 1, n л , i = 1, nп , входів через відповідні виходи i = 1...n л та i = 1...nп лінійної розрідженої антенної решітки з'єднані з входами четвертого і п'ятого комутаторів, ви ходи котрих через третій і четвертий настроювальні атенюатори з'єднані з першим і другим входами другого суматора, другий ви хід котрого з'єднаний з четвертим поглинаючим балансним навантаженням, а перший вихід з'єднаний зі входом другого регульованого фазообертача; вихід фазообертача з'єднаний з першим входом другого мостового суматора, перший вихід котрого з'єднаний з третім входом виконавчого пристрою; вихід другого регульованого атенюатора з'єднаний з першим входом направленого відгалужувача, перший вихід котрого з'єднаний з першим входом третього комутатора, а другий вихід - з другим поглинаючим балансним навантаженням, другий вхід третього комутатора з'єднаний з першим виходом радіомодема, а третій його вхід - з др угим входом другого мостового суматора, другий ви хід котрого з'єднаний з другим входом виходом радіомодема; третій ви хід направленого відгалужувача з'єднаний з другим входом логічного елемента, перший вихід котрого з'єднаний зі входом управління комутацією третього комутатора, а другий вихід - зі входами управління четвертого і п'ятого комутаторів; перший вхід логічного елемента з'єднаний з другим виходом радіомодема і четвертим входом виконавчого пристрою, другий вхід котрого з'єднаний з першим виходом радіомодема; п'ятий вхід виконавчого пристрою з'єднаний з третім виходом радіомодема; перший вихід виконавчого пристрою з'єднаний зі входом радіодатчика, який випромінює сигнал з індивідуальним кодом, а його 2...N командних виходів відповідно з'єднані з управляючими входами всіх регульованих атенюаторів і фазообертачів. Порівняльний аналіз з прототипом показує, що запропонована система відрізняється введенням у супроводжуваний рухомий об'єкт і центральний пост нових пристроїв, блоків і елементів, а також появою нових міжелементних зв'язків. У зв'язку з цим запропонована система відповідає критерію винаходу "новизна". При вивченні інших відомих технічних рішень у даній області техніки сукупність ознак, яка відрізняє винахід від прототипу, не була виявлена, що відповідає критерію "винахідницький рівень". На фіг.1 приведена структурна схема системи для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації; на фіг.2 - різниці ходів сигналів сферичних фронтів електромагнітної хвилі для двох і трьох приймальних антен; на фіг.3а - векторні діаграми, що пояснюють фазові співвідношення в мостових суматорах; на фіг.3б - конфігурація моста в полосковому виконанні. Таким чином, відмінність запропонованого технічного рішення від відомої системи полягає у тому, що підвищена завадозахищеність каналу зв'язку системи і GPS-датчика у супроводжуваному рухомому об'єкті заявляємої системи забезпечується шляхом подавлення радіозавад, джерела яких знаходяться в безпосередній близькості від об'єкта при спробі його викрадення або несанкціонованого розкриття. Крім того, наявність радіодатчика, який має ідентифікаційний номер і працює від незалежного джерела живлення, дозволяє оперативно організовувати пошук транспортного засобу у випадку його викрадення і перебування у несприятливих для пошуку умовах (металеві гаражі, трейлери, залізобетонні укриття, тунелі і т. і.). У системі також передбачено блокування руху супроводжуваного рухомого об'єкта у випадку неадекватного поводження і спроб його захоплення і викрадення. Система містить (фіг.1) декілька ШСЗ 11; 12; ...1N (не менш чотирьох) глобальної супутникової системи радіонавігації; центральний пост 2, супроводжуваний рухомий об'єкт 3 і лінії зв'язку 4. Центральний пост складається з робочої станції 5, що містить GPS-приймач з датчиком команд 6 і пристрій обробки 7, блока управління 8, індикатора 9. Супроводжуваний рухомий об'єкт у супроводжуваному об'єкті заявляємої системи забезпечується шля хом подавления радіозавад, джерела яких знаходяться в безпосередній близькості від об'єкта при спробі його викрадення або несанкціонованого розкриття. Крім того, наявність радіодатчика, який при настроювальних атенюатори 21-24; два суматори 25, 26; два мостових суматори 27, 28; два регульованих атенюатори 29, 30; два регульованих фазообертачі 31, 32; направлений відгалужувач 33; логічний елемент 34 і чотири поглинаючі баластні навантаження 351-354, причому вихід приймача з датчиком команд 6 є входом пристрою обробки 7, перший вихід якого є входом індикатора 9, другий вихід з'єднаний з приймачем з датчиком команд 6, а третій є входом блока управління 8, вихід котрого з'єднаний з третім входом приймача з датчиком команд 6. На перший і другий входи приймача з датчиком команд 6 поступають сигнали з ШСЗ. При цьому перший і третій виходи першої трьохелементної по входу лінійної розрідженої антенної решітки 14 через настроювальні атенюатори 21, 22 з'єднані з першим і другим входами першого суматора 25, а другий вихід - з першим входом першого комутатора 16, перший вихід котрого з'єднаний зі входом GPS-датчика 10 і першим виходом другого комутатора 17, другий вихід першого суматора 25 з'єднаний з першим поглинаючим балансним навантаженням 351; перший вихід першого суматора 25 з'єднаний зі входом першого регульованого фазообертача 31, вихід котрого з'єднаний з першим входом першого мостового суматора 27; другий вихід першого комутатора 16 з'єднаний зі входом першого регульованого атенюатора 29, вихід котрого з'єднаний з другим входом першого мостового суматора 27; перший вихід першого мостового суматора 27 з'єднаний з першим входом виконавчого пристрою 12, вихід котрого з'єднаний з другими входами управління положенням першого і другого комутаторів 16, 17; другий вихід першого мостового суматора 27 з'єднаний з першим входом другого комутатора 17, другий вихід котрого з'єднаний з третім поглинаючим балансним навантаженням 353; центральний вхід другої лінійної розрідженої антенної решітки 15 через її центральний вихід з'єднаний зі входом другого регульованого атенюатора 30, а i = 1, n л , i = 1, nп , входів через відповідні виходи i = 1...n л та i = 1...nп лінійної розрідженої антенної решітки 15 з'єднані з входами четвертого і п'ятого комутаторів 19, 20, виходи котрих через третій і четвертий настроювальні атенюатори 23, 24 з'єднані з перший і другим входами другого суматора 26, другий вихід котрого з'єднаний з четвертим поглинаючим балансним навантаженням 354, а перший вихід з'єднаний зі входом другого регульованого фазообертача 32; вихід фазообертача 32 з'єднаний з першим входом другого мостового суматора 28, перший вихід котрого з'єднаний з третім входом виконавчого пристрою 12; вихід другого регульованого атенюатора 30 з'єднаний з першим входом направленого відгалужувача 33, перший вихід котрого з'єднаний з першим входом третього комутатора 18, а другий вихід - з другим поглинаючим балансним навантаженням 352, другий вхід третього комутатора 18 з'єднаний з першим виходом радіомодема 11, а третій його вхід - з другим входом друго го мостового суматора 28, другий ви хід котрого з'єднаний з другим входомвиходом радіомодема 11; третій вихід направленого відгалужувача 33 з'єднаний з другим входом логічного елемента 34, перший вихід котрого з'єднаний зі входом управління комутацією третього комутатора 18, а другий вихід - зі входами управління четвертого і п'ятого комутаторів 19, 20; перший вхід логічного елемента 34 з'єднаний з другим виходом радіомодема 11, перший вхід якого є ви ходом GPS-датчика 10, і четвертим входом виконавчого пристрою 12, другий вхід котрого з'єднаний з першим виходом радіомодема 11; п'ятий вхід виконавчого пристрою 12 з'єднаний з третім виходом радіомодема 11; перший вихід виконавчого пристрою 12 з'єднаний зі входом радіодатчика 13, а його 2...N командних виходів відповідно з'єднані з управляючими входами регульованих атенюаторів 29, 30 і фазообертачів 31, 32. Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, наприклад, "Navstar" працює таким чином. Система визначає місцезнаходження супроводжуваного рухомого об'єкта 3, використовуючи си гнали ШСЗ 11...1N (не менш чотирьох). Основні принципи визначення координат за допомогою глобальних систем радіонавігації достатньо широко висвітлені в науково-технічній літературі (див. Сетевые спутниковые радионавигационные системы /Под ред. B.C. Шебтаевича, 2 изд. - М.: Радио и связь, 1993, -408с.; Б. Гофман-Веленгоф, Д. Коллинз. Глобальна система визначення місцезнаходження (GPS) /Теорія та практика/ Переклад з англ. під. ред. Я.Ц. Яцкіна. -Наукова думка, 1996. -387с.; Соловьёв Ю.А. Системы спутниковой навигации -М.: Эко-Тренд, 2000 -267с.). Для цього в системі-прототипі в супроводжуваному рухомому об'єкті 3 встановлений GPS-датчик 10, котрий по сигналах ШСЗ 11... 1N визначає своє місцезнаходження і з заданою дискретністю з допомогою радіомодема 11 передає через лінії зв'язку 4 свої координати на центральний пост 2, де вони аналізуються пристроєм обробки 7 робочої станції 5 і відображаються на індикаторі 9 оператора. Крім того, у пристрої обробки 7 порівнюються координати, які приймаються приймачем з датчиком команд 6, з точними координатами центрального поста 2, обчислюється диференційна поправка, котра по лініях зв'язку 4 передається на GPS-датчик 10 для уточнення місцезнаходження супроводжуваного рухомого об'єкта 3. Однак робота системи в указаному режимі практично неможлива, коли у випадку несанкціонованих дій лініям зв'язку 4 і GPS-да тчику 10 злонавмисники ставлять навмисні радіозавади, які перегружають лінії зв'язку і збивають роботу GPS-да тчика. Оскільки джерела радіозавад будуть знаходитися в безпосередній близькості від супроводжуваного рухомого об'єкта 3, то фронти електромагнітних хвиль будуть мати сферичну форму (фіг.2) і тому апаратуру захисту від завад можна виконати, використовуючи основні результати роботи (див. Никитченко В.В., Гладких С.Н., Вихлянцев П.С. "Анализ возможности дискриминации источников радиоизлучения по кривизне фронта волны", Изд. Вузов. Радиоэлектроника -1988, Т.31, №7, с.59-62), у котрій показана принципіальна можливість дискримінації джерел радіовиміру по кривизні фронту хвилі. Для цього в супроводжуваний рухомий об'єкт 3 системи введені дві лінійні розріджені антенні решітки 14 і 15 відповідно в канал прийому сигналів з ШСЗ 1 1...1N і канал ліній зв'язку 4. Причому перша лінійна розріджена антенна решітка 14 еквівалентна трьом приймальним антенам (фіг.2), а друга може утворювати декілька варіантів трьох приймальних антен з різною базою L між ними ( i = 1, n ). Останнє зв'язане з можливістю використання різних стандартів зв'язку, а також з пошуком менш перевантаженого частотного піддіапазону при застосуванні завад. При відсутності завад система працює у вищеописаному режимі, тобто сигнали з ШСЗ через центральну антену лінійної розрідженої антенної решітки 14 і комутатор 16 поступають на GPS-датчик 10, де обробляються і через радіомодем 11, комутатор 18, направлений відгалужувач 33, атенюатор 30 і центральну антену лінійної розрідженої антенної решітки 15 по лініях зв'язку 4 передаються на центральний пост 2. Причому сигнали з ШСЗ, що приймаються крайніми антенами лінійної розрідженої антенної решітки 14, через підстроювальні атенюатори 21, 22, суматор 25 і фазообертач 31 поступають на мостовий суматор 27, де діляться порівну між його виходами (фіг.3). Сигнал з першого виходу мостового суматора 27 поступає на виконавчий пристрій 12, для котрого наявність слабкого фазоманіпульованого сигналу на його вході являється ознакою роботи системи без завад. Сигнал з другого виходу мостового суматора 27 через комутатор 17 поступає на поглинаюче навантаження 353, де і розсіюється. Команди і сигнали з блоку управління 8 центрального поста 2 через лінії зв'язку 4 проходять у зворотному порядку через центральну антену лінійної розрідженої антенної решітки 15, атенюатор 30, направлений відгалужувач 33, комутатор 18 і радіомодем 11 на виконавчий пристрій 12. При цьому комутатори 19 і 20 знаходяться в такому стані, що не пропускають на свій вихід сигнали з крайніх антен лінійної розрідженої антенної решітки 15 (відбивають або поглинають). При постановці завад тільки GPS-датчику 10 він перегружується і сигнал на радіомодем 11 не поступає. На виході 2 останнього виробляється сигнал управління, який поступає на виконавчий пристрій 12. Одночасно на виконавчий пристрій 12 з першого виходу мостового суматора 27 поступає потужний сигнал завади. При співпадінні цих сигналів включається у виконавчому пристрої 12 схема управління положенням комутаторів 16 і 17, у яких входи підключаються по другим виходам. При цьому сигнали з центральної антени лінійної розрідженої антенної решітки 14 поступають через атенюатор 29 на другий вхід мостового суматора 27, на перший вхід котрого продовжують поступати сигнали з ШСЗ і завада. Одночасно з переключенням комутаторів по потужному сигналу завади у виконавчому пристрої 12 починається вирішення оптимізаційної задачі пошуку екстремума для сигналу завади шляхом управління фазообертачем 31 (ланцюг управління 3) і атенюатором 29 (ланцюг управління 4). Максимум, що відповідає визначеній сфері фронту електромагнітних хвиль (дальності до джерела завади) (фіг.2), буде мати місце, якщо сигнали завади, які поступають на перший вхід мостового суматора 27 через підстроювальні атенюатори 21, 22, суматор 25 і фазообертач 31 від крайніх антен лінійної розрідженої антенної решітки 14 і на другий вхід через комутатор 16 і регульований атенюатор 29 від центральної антени лінійної розрідженої антенної решітки 14 будуть здвинуті по фазі на 90° і мати однакові амплітуди (фіг.3а). Тоді по властивостям мостових суматорів на одному його виході буде відбуватися підсумовування сигналів, а на іншому віднімання. Тому сигнал завади з виходу 1 мостового суматора 27 буде поступати на виконавчий пристрій 12, а на виході 2 завади практично не буде. Сигнали з ШСЗ будуть мати плоский фронт хвилі і тому вищерозглянута настройка фазообертача 31 й атенюатора 29 буде не оптимальною і вони частково будуть проходити на вихід 2 мостового суматора 27 і далі через комутатор 17 на GPS-датчик 10, де будуть оброблятися як в режимі без завад. При зникненні завади, тобто наявності на вході виконавчого пристрою 12 фазоманіпульованого сигналу, система переходить в режим функціонування без завад, описаний вище. При постановці завад каналу зв'язку система захисту від завад працює аналогічним чином. Розглянемо її роботу у випадку відсутності завад GPS-датчику 10. Спочатку завада через центральну антену лінійної розрідженої антенної решітки 15 через атенюатор 30, направлений відгалужувач 33 і комутатор 18 перегружає радіомодем 11, на першому виході котрого появляється сигнал управління, який з першого виходу поступає на виконавчий пристрій 12 і з другого ви ходу - на перший вхід логічного елемента 34. Одночасно на другий вхід логічного елемента 34 перестає поступати інформаційний сигнал з радіомодема 11 через направлений відгалужувач 33. Така комбінація сигналів на вході логічного елемента 34 приводить до появи на його виходах сигналів управління комутаторами 18, 19, 20, котрі спрацьовують і змінюють шляхи проходження сигналів і завади. При цьому третій вхід-ви хід комутатора 18 підключається до другого входу мостового суматора 28, аналогічного мостовому суматору 27 (фіг.3), а до виходів комутаторів 19, 20 через їх перші входи підключаються перші виходи крайніх антен лінійної розрідженої антенної решітки 15. Сигнали завади будуть підсумовуватися на першому ви ході мостового суматора 28 (фіг.3) і поступати на третій вхід виконавчого пристрою 12, у якому знов буде вирішуватися задача пошуку максимуму сигналу завади шляхом управління атенюатором 30 (ланцюг управління 1) і фазообертачем 32 (ланцюг управління 2). При цьому вплив завади на радіомодем 11 практично припиняється і сигнали з GPS-датчика 10 будуть через лінії зв'язку 4 поступати на центральний пост 2, а з його блока управління 8 через радіомодем 11 на виконавчий пристрій 12. При переході на інший стандарт зв'язку або при незадовільному подавленні завади, особливо в загороджувальному режимі, у системі передбачений режим пошуку найбільш ефективного подавления, коли по черзі з допомогою комутаторів 19 і 20 на систему обробки подаються сигнали від крайніх антен i = 1...n лінійної розрідженої антенної решітки 15. Тобто йде попарне підключення крайніх антен з однаковою базою (міняється дальність до джерела завадового сигналу) з одночасним підстроюванням атенюатора 30 і фазообертача 32 доти, поки не відбудеться цілком задовільне придушення завади у каналі зв'язку і закінчиться перевантаження радіомодема 11. У випадку одночасної постановки перешкод як GPS-датчику 10, так і каналу зв'язку обидві вищеописані схеми подавления працюють одночасно. Принципова відмінність запропонованої системи від відомих полягає у можливості її функціонування в умовах навмисних завад. Крім того, у випадку позаштатної ситуації, наприклад, спробі викрадення, оператор центрального поста 2 може заблокувати рух супроводжуваного рухомого об'єкта 3 за допомогою виконавчого пристрою 12 по спеціальному сигналу, переданому по лініях зв'язку 4. Механізми блокування руху широко відомі і досить докладно описані (див. Патент №2027195 (Россия) Спутниковая система для определения местоположения судов и самолётов, потерпевших аварию, кл. G01S5/12 // Дикарёв В.И. и др.). Якщо ж викрадення відбулося, то в супроводжуваному рухомому об'єкті 3 по команді з центрального поста 2 чи автономно включається радіодатчик 13 із власним джерелом живлення, по сигналах якого можна запеленгувати координати викраденого об'єкта. GPS-приймачі і канал зв'язку працюють у дециметровому діапазоні довжин хвиль. Тому антенні решітки і всі розглянуті елементи для обробки сигналів (атенюатори, фазообертачі, комутатори, суматори, мостові схеми і т. д.) доцільно реалізувати у коаксіальному чи полосковому виконаннях. Конструкції їх широко відомі і описані (див. Семёнов Н.А. Те хническая электродинамика. Учебное пособие для вузов. М., Связь, 1973 -480с.; Лебедев И.В., Техника и приборы СВЧ, т.2, М., Высшая школа, 1972; Антенны и устройства СВЧ (проектирование фазированных антенных решёток): Учебное пособие для вузов. Д.И. Воскресенский, Р.А. Гряновская, Н.С. Давыдова и др. /Под ред. Д.И. Воскресенского.- М.: Радио и связь, 1981 -432с.). На фіг.3а в якості прикладу мостового сумматора показане його виконання на основі щілинного моста, для компактності заповненого діелектриком, а на фіг.3б - конфігурація моста в полосковому виконанні. Рішення оптимізаційної задачі (настройка регульованих атенюаторів і фазообертачів на максимальні рівні завад) і її технічна реалізація досить добре описані в науково-технічній літературі (див., наприклад, Ундроу Б., Стирнд С. Адаптивная обработка сигналов: Пер. с англ. -М.: Радио и связь, 1989. -440с.). Проведений аналіз відомих те хнічних рішень показав, що вони не мають подібних ознак, отже, пристрій, що заявляється, має істотні відмінності.
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for trucking movable objects by using signals of global satellite radio navigation system
Автори англійськоюYakornov Yevhenii Arkadiiovych, Rohov Petro Dmytrovych, Ilchenko Mykhailo Yukhymovych
Назва патенту російськоюСистема для сопровождения движущихся объектов с использованием сигналов глобальной спутниковой системы радионавигации
Автори російськоюЯкорнов Евгений Аркадиевич, Рогов Петр Дмитриевич, Ильченко Михаил Ефимович
МПК / Мітки
МПК: G01S 5/14
Мітки: рухомих, глобальної, системі, сигналів, система, радіонавігації, супутникової, об'єктів, супроводження, використанням
Код посилання
<a href="https://ua.patents.su/5-63867-sistema-dlya-suprovodzhennya-rukhomikh-obehktiv-z-vikoristannyam-signaliv-globalno-suputnikovo-sistemi-radionavigaci.html" target="_blank" rel="follow" title="База патентів України">Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації</a>
Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 57534
Опубліковано: 16.06.2003
Автори: Рогов Петро Дмитрович, Вдовіченко Наталія Євгенівна, Федоров Володимир Іванович, Якорнов Євгеній Аркадійович, Копитко Ігор Йосипович, Саричев Юрій Олексійович
МПК: G01S 5/14
Мітки: глобальної, супроводження, сигналів, рухомих, системі, використанням, радіонавігації, супутникової, система, об'єктів
Формула / Реферат:
1. Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, що містить перший супроводжуваний рухомий об'єкт з радіомодемом, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, і датчиком, вихід якого є першим входом радіомодема, а на вхід датчика надходять сигнали від штучних супутників землі глобальної супутникової системи, центральний пункт у складі...
Система та спосіб управління потужністю глобальної багатосупутникової системи
Номер патенту: 26214
Опубліковано: 19.07.1999
Автори: Бертіджер Барі Роберт, Леопольд Реймонд Джозеф, Петерсон Кеннет Мейнард
МПК: H04B 7/185
Мітки: багатосупутникової, потужністю, системі, глобальної, система, управління, спосіб
Формула / Реферат:
1, Система, управления мощностью глобальной многоспутниковой системы, в которой входящие в нее спутники образуют созвездие с пересекающимися орбитами, причем каждый спутник содержит множество антенн, проецирующих множество лепестков диаграмм направленности на земную поверхность, причем каждый лепесток имеет первую зону обслуживания на земной поверхности, или "ячейку", причем сумма ячеек для каждого спутника образует вторую зону...
Пристрій обробки сигналів радіолокаційної інформації
Номер патенту: 44415
Опубліковано: 15.12.2003
Автори: Немчин Олександр Федорович, Траїлін Вячеслав Федорович, Мокеєв Юрій Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ
МПК: G01S 7/28
Мітки: обробки, інформації, пристрій, сигналів, радіолокаційної
Формула / Реферат:
Пристрій обробки сигналів радіолокаційної інформації, що містить схему затримки з паралельно з'єднаних блоків пам'яті, перший та другий суматори та обчислювальний блок, який відрізняється тим, що схема затримки виконана з 2N-1 виходами, пристрій додатково містить блок синхронізації, з’єднаний зі схемою затримки, блоком обробки та з’єднаними між собою блоком накопичення і блоком обнулення, перший елемент НI, першу схему І, другий елемент НI,...
Прилад для резонансної низькоінтенсивної фізіотерапії з використанням зовнішнього носія інформації
Номер патенту: 989
Опубліковано: 16.07.2001
Автори: Самосюк Іван Захарович, Чухраєва Олена Миколаївна, Самосюк Наталія Іванівна, Чухраєв Микола Вікторович, Писанко Олег Іванович
МПК: A61H 39/00, A61N 5/00
Мітки: зовнішнього, фізіотерапії, резонансної, інформації, використанням, носія, низькоінтенсивної, прилад
Формула / Реферат:
Прилад для резонансної низькоінтенсивної фізіотерапії з використанням зовнішнього носія інформації, що містить корпус, в якому встановлені блок живлення, контролю, автономного управління і/або управління з використанням зовнішнього носія інформації, та органи керування і індикації (БЖКУ), який включає субблок живлення, мікро-ЕОМ, обладнану пристроєм для підключення її до зовнішнього комп'ютера, пристрій створення цифрової, світлової та...
Алгоритмічний перетворювач
Номер патенту: 56894
Опубліковано: 15.05.2003
Автори: Дергачов Володимир Андрійович, Кошовий Микола Дмитрович, Світличний Олександр Володимирович, Сенько Валерій Євгенович
МПК: G06F 7/00
Мітки: алгоритмічний, перетворювач
Формула / Реферат:
Алгоритмічний перетворювач, що містить шість входів, вихід пристрою, мультиплексор, два елементи І, елемент АБО, причому перший вхід пристрою з'єднаний з першим входом першого елемента І, другий вхід пристрою з'єднаний з першим адресним входом мультиплексора, вихід першого елемента І з'єднаний з другим інформаційним входом мультиплексора, вихід першого елемента АБО з'єднаний з четвертим інформаційним входом мультиплексора, який відрізняється...
Попередній патент: Перетворювач комп’ютерного випромінювання “діма інь-ян”
Наступний патент: Спосіб лікування печінкової недостатності у хворих з механічною жовтяницею
Випадковий патент: Спосіб лікування врослого нігтя