Спосіб автономної автоматичної посадки літальних апаратів
Номер патенту: 64164
Опубліковано: 16.02.2004


Формула / Реферат
1. Спосіб автономної автоматичної посадки літальних апаратів (ЛА), який включає визначення трьох складових швидкості і прискорення, задання трьох складових швидкості і прискорення в розрахункову точку дотику (РТД) ЛА на злітно-посадкову смугу (ЗПС), формування опорної траєкторії зниження і траєкторії з точки початку зниження, яка знаходиться на відстані Д0 від розрахункової точки дотику, визначення відхилення ЛА від опорної траєкторії зниження, додаткове задання граничних значень висоти польоту і бокового відхилення від вертикальної площини, яка проходить через вісь ЗПС, який відрізняється тим, що висоту польоту, горизонтальну дальність до РТД, відхилення ЛА від вертикальної площини, яка проходить через РТД і вісь ЗПС, визначають на основі обчислення дворазово скоректованих просторових ортодромічних координат ЛА при вході в район аеродрому і в сектор заходу на посадку, опорну траєкторію зниження формують на основі програмних просторових ортодромічних координат точок схеми заходу на посадку з глобальної бази даних цифрового обчислювального модуля (ЦОМ), визначають поточну задану траєкторію зниження того ж функціонального вигляду, що й опорна траєкторія зниження з поточного місцеположення (МС) ЛА, з цієї траєкторії визначають поточні і задані вертикальну, горизонтальну і поперечну швидкості і їх відхилення, управляючі сигнали на основі визначень і обчислень в окремому цифровому обчислювальному модулі (ЦОМ) подають в систему управління польотом (СУП), граничні значення висоти польоту, бокового відхилення і максимальних вертикальної і повітряної швидкостей руху знаходять на основі допустимих відхилень від запрограмованої траєкторії польоту, а максимальні вертикальну і шляхову швидкості в районі підходу до аеродрому задають по обмеженнях льотно-технічних характеристик ЛА з глобальної бази даних, з поточної траєкторії зниження визначають параметри маневрів по запобіганню зіткнень, а також поточну задану вертикальну, горизонтальну і поперечну швидкості польоту і їх відхилення, при наявності на борту зв'язаної інерційної навігаційної системи (ІНС), об'єднаної з глобальною диференційною супутниковою системою (GNSS), яка взаємодіє з додатковим фіксованим в одній точці приймачем для визначення корекції супутникових сигналів, забезпечують обчислення параметрів автоматичного заходу на посадку на будь-якому аеродромі, а також контроль і корекцію геометричної висоти, визначеної IHC/GNSS-системою.
2.Спосіб за п.1, який відрізняється тим, що вертикальні маневри по запобіганню зіткненню з наземною перешкодою при виході за границі сектора заходу на посадку, що виконуються за сигналами (ЦОМ), ускладнені появою повітряної перешкоди, і по запобіганню зіткненню з повітряною перешкодою, ускладнені появою наземної перешкоди, закінчують по управляючих сигналах ЦОМ як комбіновані.
3. Спосіб за пп. 1, 2, який відрізняється тим, що після перетворення статичних тисків на рівні РТД і на висоті польоту в цифрову форму в цифровому барометричному висотомірі обчислення геометричної висоти польоту виконують в ЦОМ шляхом врахування температурної і барометричної похибок висотоміра.
4. Спосіб за пп. 1, 3, який відрізняється тим, що нову опорну траєкторію польоту ЛА формують, виходячи із значень координат і параметрів руху, як при максимальних відхиленнях від заданої траєкторії по висоті, так і при черговій корекції просторових координат перед входом в сектор заходу на посадку.
Текст
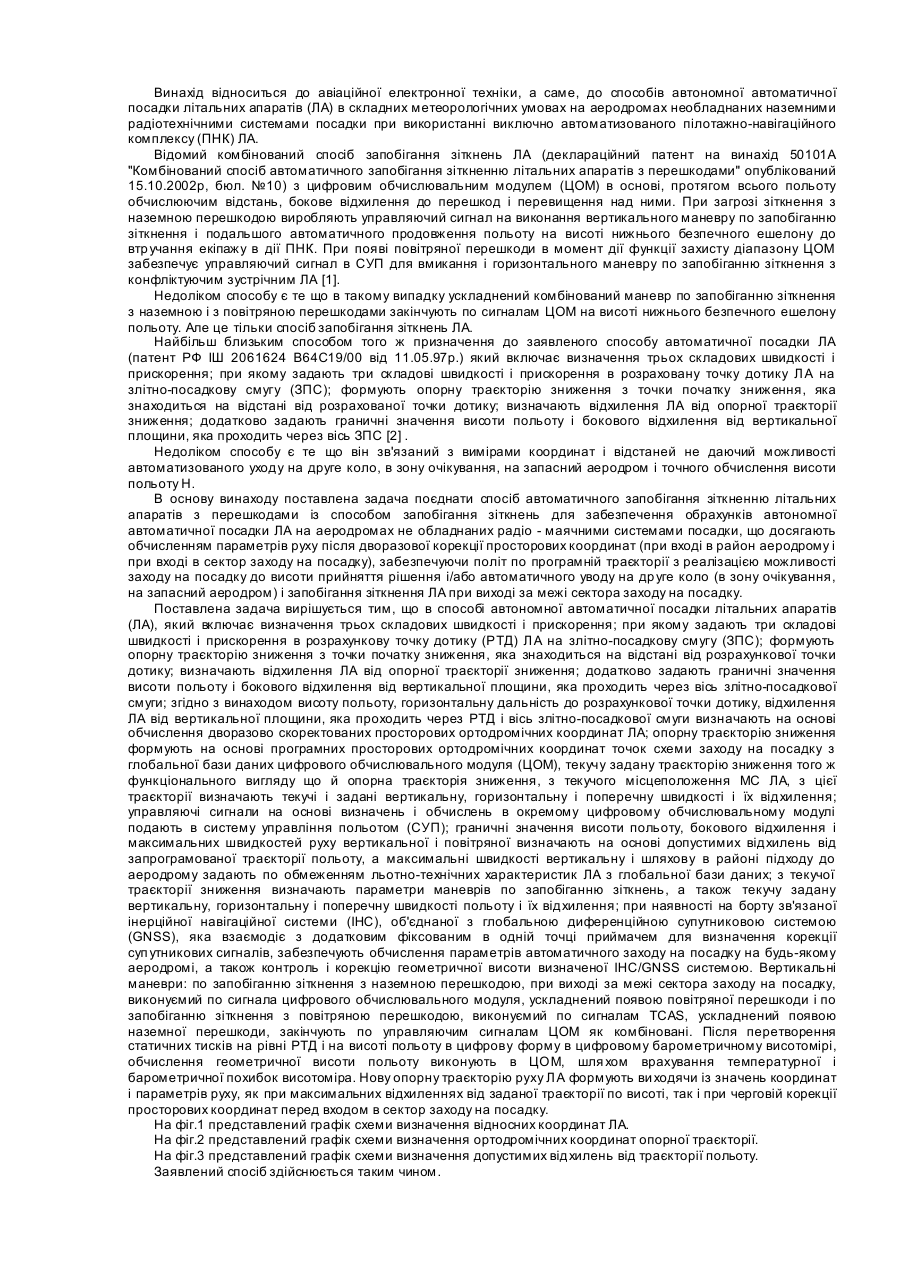
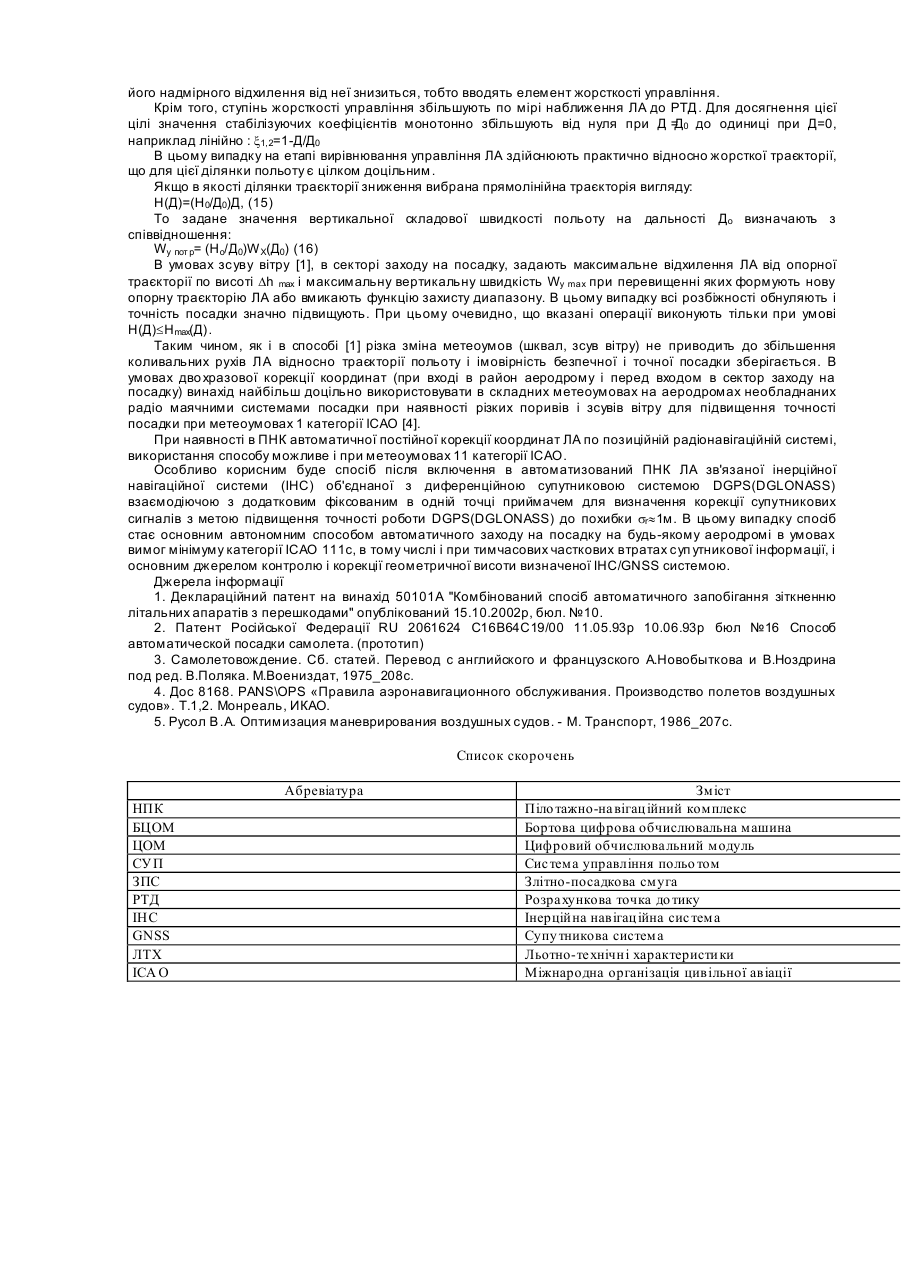
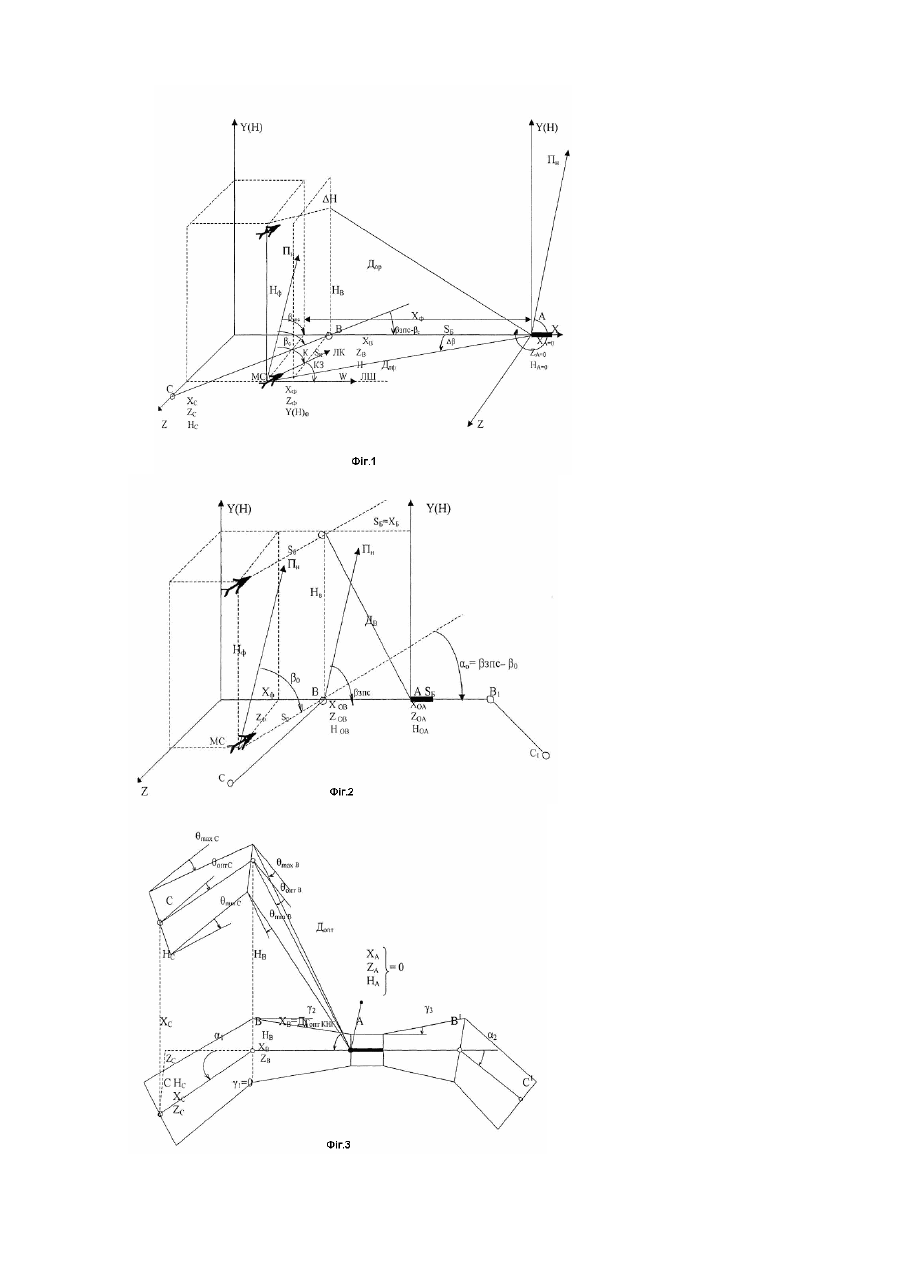
Винахід відноситься до авіаційної електронної техніки, а саме, до способів автономної автоматичної посадки літальних апаратів (ЛА) в складних метеорологічних умовах на аеродромах необладнаних наземними радіотехнічними системами посадки при використанні виключно автоматизованого пілотажно-навігаційного комплексу (ПНК) ЛА. Відомий комбінований спосіб запобігання зіткнень ЛА (деклараційний патент на винахід 50101А "Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів з перешкодами" опублікований 15.10.2002р, бюл. №10) з цифровим обчислювальним модулем (ЦОМ) в основі, протягом всього польоту обчислюючим відстань, бокове відхилення до перешкод і перевищення над ними. При загрозі зіткнення з наземною перешкодою виробляють управляючий сигнал на виконання вертикального маневру по запобіганню зіткнення і подальшого автоматичного продовження польоту на висоті нижнього безпечного ешелону до втр учання екіпажу в дії ПНК. При появі повітряної перешкоди в момент дії функції захисту діапазону ЦОМ забезпечує управляючий сигнал в СУП для вмикання і горизонтального маневру по запобіганню зіткнення з конфліктуючим зустрічним ЛА [1]. Недоліком способу є те що в такому випадку ускладнений комбінований маневр по запобіганню зіткнення з наземною і з повітряною перешкодами закінчують по сигналам ЦОМ на висоті нижнього безпечного ешелону польоту. Але це тільки спосіб запобігання зіткнень ЛА. Найбільш близьким способом того ж призначення до заявленого способу автоматичної посадки ЛА (патент РФ ІШ 2061624 В64С19/00 від 11.05.97p.) який включає визначення трьох складових швидкості і прискорення; при якому задають три складові швидкості і прискорення в розраховану точку дотику ЛА на злітно-посадкову смугу (ЗПС); формують опорну траєкторію зниження з точки початку зниження, яка знаходиться на відстані від розрахованої точки дотику; визначають відхилення ЛА від опорної траєкторії зниження; додатково задають граничні значення висоти польоту і бокового відхилення від вертикальної площини, яка проходить через вісь ЗПС [2] . Недоліком способу є те що він зв'язаний з вимірами координат і відстаней не даючий можливості автоматизованого уходу на друге коло, в зону очікування, на запасний аеродром і точного обчислення висоти польоту Н. В основу винаходу поставлена задача поєднати спосіб автоматичного запобігання зіткненню літальних апаратів з перешкодами із способом запобігання зіткнень для забезпечення обрахунків автономної автоматичної посадки ЛА на аеродромах не обладнаних радіо - маячними системами посадки, що досягають обчисленням параметрів руху після дворазової корекції просторових координат (при вході в район аеродрому і при вході в сектор заходу на посадку), забезпечуючи політ по програмній траєкторії з реалізацією можливості заходу на посадку до висоти прийняття рішення і/або автоматичного уводу на др уге коло (в зону очікування, на запасний аеродром) і запобігання зіткнення ЛА при виході за межі сектора заходу на посадку. Поставлена задача вирішується тим, що в способі автономної автоматичної посадки літальних апаратів (ЛА), який включає визначення трьох складових швидкості і прискорення; при якому задають три складові швидкості і прискорення в розрахункову точку дотику (РТД) ЛА на злітно-посадкову смугу (ЗПС); формують опорну траєкторію зниження з точки початку зниження, яка знаходиться на відстані від розрахункової точки дотику; визначають відхилення ЛА від опорної траєкторії зниження; додатково задають граничні значення висоти польоту і бокового відхилення від вертикальної площини, яка проходить через вісь злітно-посадкової смуги; згідно з винаходом висоту польоту, горизонтальну дальність до розрахункової точки дотику, відхилення ЛА від вертикальної площини, яка проходить через РТД і вісь злітно-посадкової смуги визначають на основі обчислення дворазово скоректованих просторових ортодромічних координат ЛА; опорну траєкторію зниження формують на основі програмних просторових ортодромічних координат точок схеми заходу на посадку з глобальної бази даних цифрового обчислювального модуля (ЦОМ), текучу задану траєкторію зниження того ж функціонального вигляду що й опорна траєкторія зниження, з текучого місцеположення MC ЛА, з цієї траєкторії визначають текучі і задані вертикальну, горизонтальну і поперечну швидкості і їх відхилення; управляючі сигнали на основі визначень і обчислень в окремому цифровому обчислювальному модулі подають в систему управління польотом (СУП); граничні значення висоти польоту, бокового відхилення і максимальних швидкостей руху вертикальної і повітряної визначають на основі допустимих відхилень від запрограмованої траєкторії польоту, а максимальні швидкості вертикальну і шляхову в районі підходу до аеродрому задають по обмеженням льотно-технічних характеристик ЛА з глобальної бази даних; з текучої траєкторії зниження визначають параметри маневрів по запобіганню зіткнень, а також текучу задану вертикальну, горизонтальну і поперечну швидкості польоту і їх відхилення; при наявності на борту зв'язаної інерційної навігаційної системи (ІНС), об'єднаної з глобальною диференційною супутниковою системою (GNSS), яка взаємодіє з додатковим фіксованим в одній точці приймачем для визначення корекції суп утникових сигналів, забезпечують обчислення параметрів автоматичного заходу на посадку на будь-якому аеродромі, а також контроль і корекцію геометричної висоти визначеної IHC/GNSS системою. Вертикальні маневри: по запобіганню зіткнення з наземною перешкодою, при виході за межі сектора заходу на посадку, виконуємий по сигнала цифрового обчислювального модуля, ускладнений появою повітряної перешкоди і по запобіганню зіткнення з повітряною перешкодою, виконуємий по сигналам TCAS, ускладнений появою наземної перешкоди, закінчують по управляючим сигналам ЦОМ як комбіновані. Після перетворення статичних тисків на рівні РТД і на висоті польоту в цифрову форму в цифровому барометричному висотомірі, обчислення геометричної висоти польоту виконують в ЦОМ, шля хом врахування температурної і барометричної похибок висотоміра. Нову опорну траєкторію руху ЛА формують ви ходячи із значень координат і параметрів руху, як при максимальних відхиленнях від заданої траєкторії по висоті, так і при черговій корекції просторових координат перед входом в сектор заходу на посадку. На фіг.1 представлений графік схеми визначення відносних координат ЛА. На фіг.2 представлений графік схеми визначення ортодромічних координат опорної траєкторії. На фіг.3 представлений графік схеми визначення допустимих відхилень від траєкторії польоту. Заявлений спосіб здійснюється таким чином. Після першої корекції координат при вході в район аеродрому, в режимі роботи ЦОМ "Захід на посадку" (по одержаному азимуту і відстані від розрахованої точки дотику (РТД) на злітно-посадковій смузі (ЗПС) Аф і Д ф , находять фактичні просторові координати Н ф , хф , zф в момент корекції координат ЛА(фі г.1). Для цього, по тиску аеродрома Ро і тиску заміреному Рн, диференційним барометричним методом [3,5] шляхом диференційного обчислення в цифровій формі гіпсометричної формули находять барометричну висоту відносно РТД на ЗПС Н б : t R æ T öé æ Р öù гр Hб = ç 0 ÷ê1 - ç Н ÷ú , (1) ç t гр ÷ê ç Р О ÷ú øû è øë è В формулі (1) більшість параметрів приймають стандартними величинами: абсолютну температуру у землі Т0, температурний градієнт trp і газову постійну R[5]. Тоді барометрична висота відносно точки дотику на злітно-посадковій смузі (ЗПС) Нб стає однозначною функцією тисків у землі виставленого на шкалі тиску висотоміра Р0 і тиску на висоті вимірюємого висотоміром РH, тобто: Нб = ò (РН ) , (2) Після врахування температурної похибки висотоміра і тиску у землі Р0, в ЦОМ одержують істинну(геометричну) висоту польоту відносно точки дотику на ЗПС Нтд : Нтд=Нб +(±DHt)+(±DНб ), (3) де Н б - висота барометрична для стандартної атмосфери з формули (2); DHt=(to-15)Н/(273+t0-0,00325 Н)- температурна похибка висотоміра [2]; DНб = (Р0 - 760)11 ü ý барометрична висота ТД на ЗПС. DНб = (Р0 - 1013,25)8,25 - þ Після цього визначають дальність горизонтальну точки дотику на ЗПС Дп-д і фактичні ортодромічні координати ЛА в момент корекції Хк і ZK : Дгтд = Д 2 - Н2 ü ф ТД ï ï ХК = - Дгтд cos Db ý, , (4) ï ZК = Дгтд sinD b ï þ Db=Аф ±180°-bзпс де Db зпс шляховий кут ЗПС з глобальної бази даних ЦОМ; Дф - одержана похила дальність від ТД в момент корекції координат; Нтд - висота з формули (3); Хк , Zк - ортодромічні координати ЛА в момент корекції. Текучі координати Ла Хк і Zк находять з співвідношень: t ü Хф = Хк + ò W X dt ï ï o ý (5) t ï Zф = Хк + ò W zdt ï o þ де Wx=-Wгcos [ß зпс-(K+K3)] і Wz=Wгsin [ßзпс-(K+K3)]проекції просторової швидкості ЛА фактичної Wф на координати X і Z з початком в точці дотику на ЗПС. В цих формула х К і КЗ - к урс ЛА і кут зносу фактичні по даним ЦОМ, інерційної навігаційної Системи (ІНС); Wг=Wф cosa, (6) Wy де a - кут зниження ЛА; a=arc sin , Wф dH , (7) dt де Н - фактична висота з формули (3). Проміжні текучі значення похилої дальності ЛА фактичної Дт, горизонтальної дальності текучої Дгт, азимута ЛА текучого Ат визначають з співвідношень (фіг.1): де Wy= ü ï ï ï 2 2 Дгт = Х ф + Z ф ý, (8) ï Zф oï А Т = b зпс + arctg ± 180 ï Хф þ де Хф , Zф , Нф - значення текучих параметрів з співвідношень (5,3). По даним глобальної бази даних ЦОМ про шляхові кути стандартної траєкторії зниження між точками ßi і ßi-1, а також про приниження траєкторії від точки і до точки і-1 на відстанях Sі-Ss-1 і висотах Ні-Ні-1=DН по ортодромічним координатам точок траєкторії Хі, Хі-1, Zі, Zі-1, і далі, задають параметри опорної траєкторії зниження Хо, Z o, Но , Д о, Ао, Дго2 2 2 Д т = Х ф + Z ф + Hф Ці параметри находять з співвідношень (фіг.2): де Wxo=Wrcos(ßзnc-ß i), Wzo=Wrsin(ß зnc-ßi) і Wyo=Wsina, (10) де a= arctg(dH/dd), де dH=Hi-Hi-1 і dd=Si-Si-1. На першій ділянці маршруту після точки корекції координат, дані ф.9 визначають по Нф і Sф , тоді dH=Нф -Нi і dd=Sф -Si, b Ф=arctg (Zк-Zi/Хк-Хі), де b ф - шля ховий кут першої ділянки після корекції координат. По даним формул 5,7-10 формують відхилення вертикальної DWy і поперечної AWZ0 складових швидкості польоту від заданих опорною траєкторією зниження: DW yo=W y-W yo і DWz o=Wz-Wz o, (11) де - W y, W yo ,Wz, Wz o- фактичні і опорні вертикальна і поперечна швидкості ЛA з ф.6, 10. Управляючі сигнали формують в відповідності з співвідношеннями [1]: UУ(Д)=К1DWУ(Д)+K 2d[DW y(Д)]/dt Uz(Д)=К3DWz(Д)+K 4d[DWz(Д)]/dt, де К1 ,К2 ,К3 , К4- динамічні коефіцієнти ЛА. При такому керуванні ЛА здійснюють управління вертикальною швидкістю зниження Wy, забезпечуючою посадку в РТД з заданими параметрами руху в цій точці, при цьому задану Wy знаходять з траєкторії заданого вигляду, проведеної з текучої точки положення ЛА в розраховану точку до тику. Після повторної корекції координат (при вході в сектор заходу на посадку) процес обрахування траєкторії починають спочатку по формулам 1-12. При цьому контроль відхилень ЛА від опорної траєкторії ведуть не перевищуючи максимальних відхилень Hmax, Z max, W y mах і W max як по висоті Н, горизонтальному відхиленню Z від вертикальної площини, яка проходить через вісь ЗПС. Тобто Н(Д)£Нmах(Д), Н(Д)³Нmіп(Д), Z(Д)£Zmах(Д), Wy£W y mах , W£W max. Граничні значення Нmах, Нmіп , Z max визначають на основі даних закладених в стандартну траєкторію прильоту(виліту) [4](фіг.3). Наприклад: В точці А схемою закладена допустима ширина відхилень по Z±90м, а розширення зони до точки Б закладено з кутом g2. Тоді Zв=±ZА+DZ, Де DZ=(XB-XA)tgg2 , tgg2=(ZВ-ZА)/(XВ-XА). В ци х формулах Z В, ZA, ХВ , ХА - ортодромічні координати точок А і В стандартної траєкторії з глобальної бази даних ЦОМ. Аналогічно знаходять і допуски по висоті. В базу даних закладена стандартна траєкторія прильоту з: оптимальним градієнтом зниження 5% (90м на 1Мм); максимально-допустимим градієнтом зниження 6,5% (120м на 1Мм); мінімально - допустимим градієнтом зниження 4% (70м на 1Мм). Тоді зв'язок висот оптимальної Нс опт, максимальної Нmах і мінімальної Нс mіп ,буде таким : ü Hc опт = Hв опт + Dhв с опт ï ï + DНс max = Hв max + Dhв с max ý , (13) ï - DHc min = Hв min + D hв с min ï þ де Dh в с опт =Нвопт+90DS/1,852, Dhвc max=Hв max+120DS/1,852, DhBC min=HB min+70DS/1,852. В цих формула х DS=Zc-Z в/arcsina, де a=arctg(ZС-ZB/ХС-ХВ), де ZС, ZB, ХС, ХВ – ортодромічні координати точок С і В з глобальної бази даних БЦОМ; НВ опт, Нв max , НВ mi n - раніше обчислені параметри висоти. Аналогічно знаходять зв'язок просторових координат всіх точок траєкторії прильоту і виліту. При відхиленні ЛА за межі визначених висот по Н і Z політ по опорній траєкторії припиняють, по формулам (1-12) визначають параметри нової опорної траєкторії, яку видержують до наступного відхилення або до наступної точки корекції просторових координат ЛА. При відхиленні ЛА за межі Wy max, Wmax (обмежених характеристиками ЛА) вмикають функцію захисту діапазону і здійснюють передбачений маневр. Аналогічно діють і в ускладненій конфліктній ситуації польоту [2]. Для мінімізації імовірності таких подій в закон управління вводять стабілізуючі складові, в результаті чого він приймає вигляд [1]: Uy ( Д) = x1D h + K1DW y + K 2 d( DW y ) / dt ï ü ý, (14) UZ (Д ) = x2 Dh + K 3 DW Z + K 4 d(DW Z ) / dt ï þ де 0£x1 x2£1 - стабілізуючі коефіцієнти. В цьому випадку ЛА при зниженні буде "підтягуватись" до опорної траєкторії, в наслідок чого імовірність його надмірного відхилення від неї знизиться, тобто вводять елемент жорсткості управління. Крім того, ступінь жорсткості управління збільшують по мірі наближення ЛА до РТД. Для досягнення цієї цілі значення стабілізуючих коефіцієнтів монотонно збільшують від нуля при Д = 0 до одиниці при Д=0, Д наприклад лінійно : x1,2=1-Д/Д0 В цьому випадку на етапі вирівнювання управління ЛА здійснюють практично відносно жорсткої траєкторії, що для цієї ділянки польоту є цілком доцільним. Якщо в якості ділянки траєкторії зниження вибрана прямолінійна траєкторія вигляду: Н(Д)=(Н0/Д0)Д, (15) То задане значення вертикальної складової швидкості польоту на дальності До визначають з співвідношення: Wy пот р= (Но/Д0)W X(Д0) (16) В умовах зсуву вітру [1], в секторі заходу на посадку, задають максимальне відхилення ЛА від опорної траєкторії по висоті Dh max і максимальну вертикальну швидкість Wy max при перевищенні яких формують нову опорну траєкторію ЛА або вмикають функцію захисту диапазону. В цьому випадку всі розбіжності обнуляють і точність посадки значно підвищують. При цьому очевидно, що вказані операції виконують тільки при умові Н(Д)£Нmах(Д). Таким чином, як і в способі [1] різка зміна метеоумов (шквал, зсув вітру) не приводить до збільшення коливальних рухів ЛА відносно траєкторії польоту і імовірність безпечної і точної посадки зберігається. В умовах дво хразової корекції координат (при вході в район аеродрому і перед входом в сектор заходу на посадку) винахід найбільш доцільно використовувати в складних метеоумовах на аеродромах необладнаних радіо маячними системами посадки при наявності різких поривів і зсувів вітру для підвищення точності посадки при метеоумовах 1 категорії ICАО [4]. При наявності в ПНК автоматичної постійної корекції координат ЛА по позиційній радіонавігаційній системі, використання способу можливе і при метеоумовах 11 категорії ICАО. Особливо корисним буде спосіб після включення в автоматизований ПНК ЛА зв'язаної інерційної навігаційної системи (ІНС) об'єднаної з диференційною супутниковою системою DGPS(DGLONASS) взаємодіючою з додатковим фіксованим в одній точці приймачем для визначення корекції супутникових сигналів з метою підвищення точності роботи DGPS(DGLONASS) до похибки sr»1м. В цьому випадку спосіб стає основним автономним способом автоматичного заходу на посадку на будь-якому аеродромі в умовах вимог мінімуму категорії ICАО 111с, в тому числі і при тимчасових часткових втратах суп утникової інформації, і основним джерелом контролю і корекції геометричної висоти визначеної IHC/GNSS системою. Джерела інформації 1. Деклараційний патент на винахід 50101А "Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів з перешкодами" опублікований 15.10.2002р, бюл. №10. 2. Патент Російської Федерації RU 2061624 С16В64С19/00 11.05.93р 10.06.93р бюл №16 Способ автоматической посадки самолета. (прототип) 3. Самолетовождение. Сб. статей. Перевод с английского и французского А.Новобыткова и В.Ноздрина под ред. В.Поляка. М.Воениздат, 1975_208с. 4. Дос 8168. PANS\OPS «Правила аэронавигационного обслуживания. Производство полетов воздушных судов». Т.1,2. Монреаль, ИКАО. 5. Русол В.А. Оптимизация маневрирования воздушных судов. - М. Транспорт, 1986_207с. Список скорочень Абревіатура НПК БЦОМ ЦОМ СУП ЗПС РТД ІНС GNSS ЛТХ ІСА О Зміст Піло тажно-навігаційний комплекс Бортова цифрова обчислювальна машина Цифровий обчислювальний модуль Система управління польо том Злітно-посадкова смуга Розрахункова точка до тику Інерційна навігаційна сис тема Супу тникова система Льотно-технічні характеристики Міжнародна організація цивільної авіації
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of autonomous automatic landing of aircraft
Назва патенту російськоюСпособ автономной автоматической посадки летательных аппаратов
МПК / Мітки
МПК: B64C 19/00
Мітки: літальних, автономно, автоматичної, посадки, спосіб, апаратів
Код посилання
<a href="https://ua.patents.su/5-64164-sposib-avtonomno-avtomatichno-posadki-litalnikh-aparativ.html" target="_blank" rel="follow" title="База патентів України">Спосіб автономної автоматичної посадки літальних апаратів</a>
Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів з перешкодами
Номер патенту: 50101
Опубліковано: 15.10.2002
Автор: Лялько Віктор Григорович
МПК: G01C 21/00, B64C 19/00
Мітки: перешкодами, зіткненню, автоматичного, апаратів, літальних, запобігання, комбінований, спосіб
Формула / Реферат:
1 .Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів (ЛА) з перешкодами на висотах польоту Нс = Нвд + 400 м і нижче, де: Нс - висота стабілізації ЛА на термін зміни режиму управління; Hвд - висота, обчислена бортовою цифровою обчислювальною машиною (БЦОМ), висота відносна мінімально допустима в момент початку вертикального маневру по запобіганню зіткненню з наземною перешкодою; 400 м - запас висоти на термін...
Спосіб одержання реактивної тяги для космічних літальних апаратів
Номер патенту: 38030
Опубліковано: 15.05.2001
Автори: Потапов Юрій Семенович, Фоминський Леонід Павлович
МПК: F03H 5/00
Мітки: літальних, реактивної, космічних, апаратів, тяги, одержання, спосіб
Текст:
...витрати енергоресурсів (ядерного «палива» та ін.), що вимагаються для досягнення однієї і тієї ж величини реактивної тяги. Цим досягається поставлена задача зменшення витрати енергоресурсів. Використання за запропонованим винаходом компактної і легкої вихрової тр уби чи іншого пристрою, що приводить воднемістку речовину в обертання, замість багатотонного ядерного реактора у відомому способі, дозволяє зменшити масу реактивного двигуна,...
Спосіб забезпечення безпеки польотів літальних апаратів та пристрій для його здійснення
Номер патенту: 26552
Опубліковано: 11.10.1999
Автори: Шазель Ксав'є, Уно Анне-Марі, Лепер Жерар
МПК: B64D 45/00, G01S 5/14, G08G 5/00, G01C 21/00, G05D 1/00, G01S 13/94
Мітки: забезпечення, апаратів, безпеки, літальних, польотів, пристрій, спосіб, здійснення
Формула / Реферат:
1. Способ обеспечения безопасности полетов летательных аппаратов (ЛА), содержащий актуализацию наземной базы данных о местности, описывающей по меньшей мере значительную часть поверхности земного шара, включающую этапы занесения информации, извлекаемой из наземного файла и содержащего данные о по меньшей мере значительной части поверхности земного шара, в массовую память в виде структуры базы данных, построения в массовой памяти по крайней...
Рушій літальних апаратів “дракон”
Номер патенту: 38115
Опубліковано: 15.05.2001
Автори: Зуєв Микола Григорович, Титаренко Олександр Михайлович, Джелалі Олександр Володимирович
МПК: B64D 27/00, B64C 29/00
Мітки: рушій, літальних, дракон, апаратів
Формула / Реферат:
(21) 2000053083 Дата прийняття(54) (57) рішення 27.09.2000 р.Рушій літальних апаратів, який складається з двох каркасів крил з шарнірно прикріпленими до них з нижнього боку...
Приймач статичного тиску для гіперзвукових літальних апаратів
Номер патенту: 53670
Опубліковано: 17.02.2003
Автори: Голубков Геннадій Михайлович, Кулігін Анатолій Михайлович, Лепескин Ігор Борисович, Єрмоленко Євгенія Олександрівна, Гладка Інна Володимирівна
МПК: G01L 19/00
Мітки: гіперзвукових, приймач, літальних, статичного, апаратів, тиску
Формула / Реферат:
Приймач статичного тиску гіперзвукового літального апарата, що включає стержень з приймальними отворами на його бічній поверхні, внутрішній прохідний тракт, що сполучається з чутливим елементом, який відрізняється тим, що у внутрішньому тракті приймача перед чутливим елементом вставлено теплообмінник з матеріалу з високою теплопровідністю, наприклад міді, виконаний у вигляді коаксіальних циліндрів, змочувані поверхні яких відполіровані ,...
Попередній патент: Спосіб одержання біологічно активної речовини з гепатопротекторними та гастроентерологічними властивостями
Наступний патент: Спосіб вакуумної агломерації руд та пристрій для його здійснення
Випадковий патент: Комплект валків прокатної кліті листового стану