Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 67317
Опубліковано: 10.02.2012
Автори: Хамуйєла Аугушту Жоакима Герра, Фіранський Володимир Борисович, Кузнєцов Юрій Миколайович, Шинкаренко Василь Федорович
Формула / Реферат
1. Багатокоординатний свердлильно-фрезерний верстат, що містить несучу систему, виконану у вигляді або оболонкової просторової фігури правильної форми з основою у вигляді багатогранника, або круга, розташовану на нерухомій підлозі, шпиндельний вузлопінольного типу з інструментальною системою на рухомій або нерухомій платформі з приводом головного руху і вертикальної подачі або без неї і двокоординатний хрестоподібний стіл, зверху якого розташована заготовка, що обробляється, який відрізняється тим, що несуча система і основа виконані рухомими одна відносно одної або відносно нерухомої підлоги.
2. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що несуча система виконана відносно основи поворотною з приводом обертання, розташованим в основі.
3. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що несуча система і основа жорстко зв'язані між собою з можливістю поступового руху відносно підлоги з електромагнітопроводом, а в основі розташований ротор лінійного електродвигуна, який взаємодіє з електромагнітопроводом.
4. Багатокоординатний свердлильно-фрезерний верстат за п 1, який відрізняється тим, що інструментальна система розташована на рухомій платформі, яка зв'язана з приводом переміщення через штанги постійної або змінної - керованої довжини.
5. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що несуча система виконана відносно основи поворотною, а основа має можливість поступового руху відносно підлоги в будь-якому напрямку.
6. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що привод повороту несучої системи виконаний у вигляді плоскотороїдального електродвигуна, ротор якого зв'язаний з нижньою частиною несучої системи, а статор з нерухомою основою.
Текст
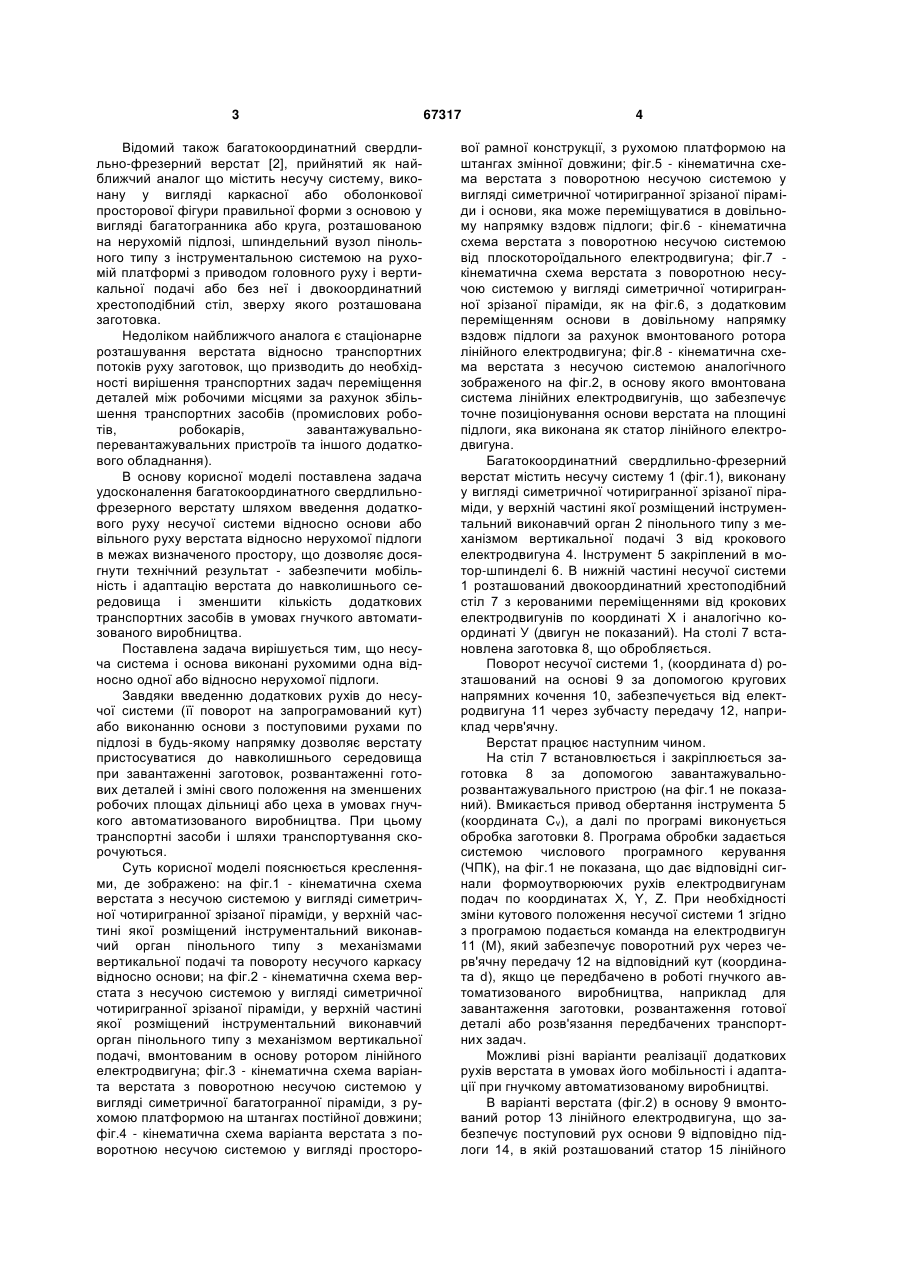
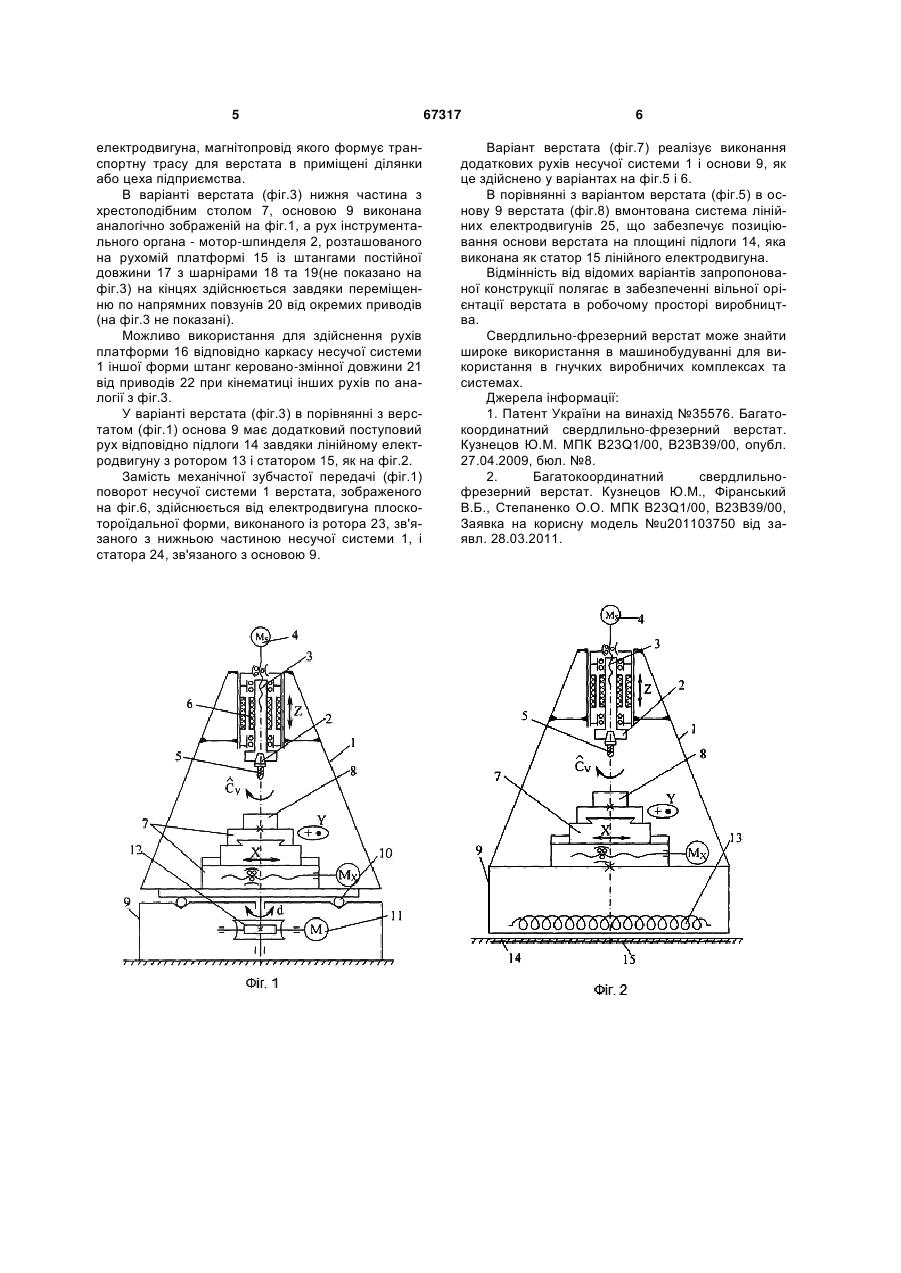
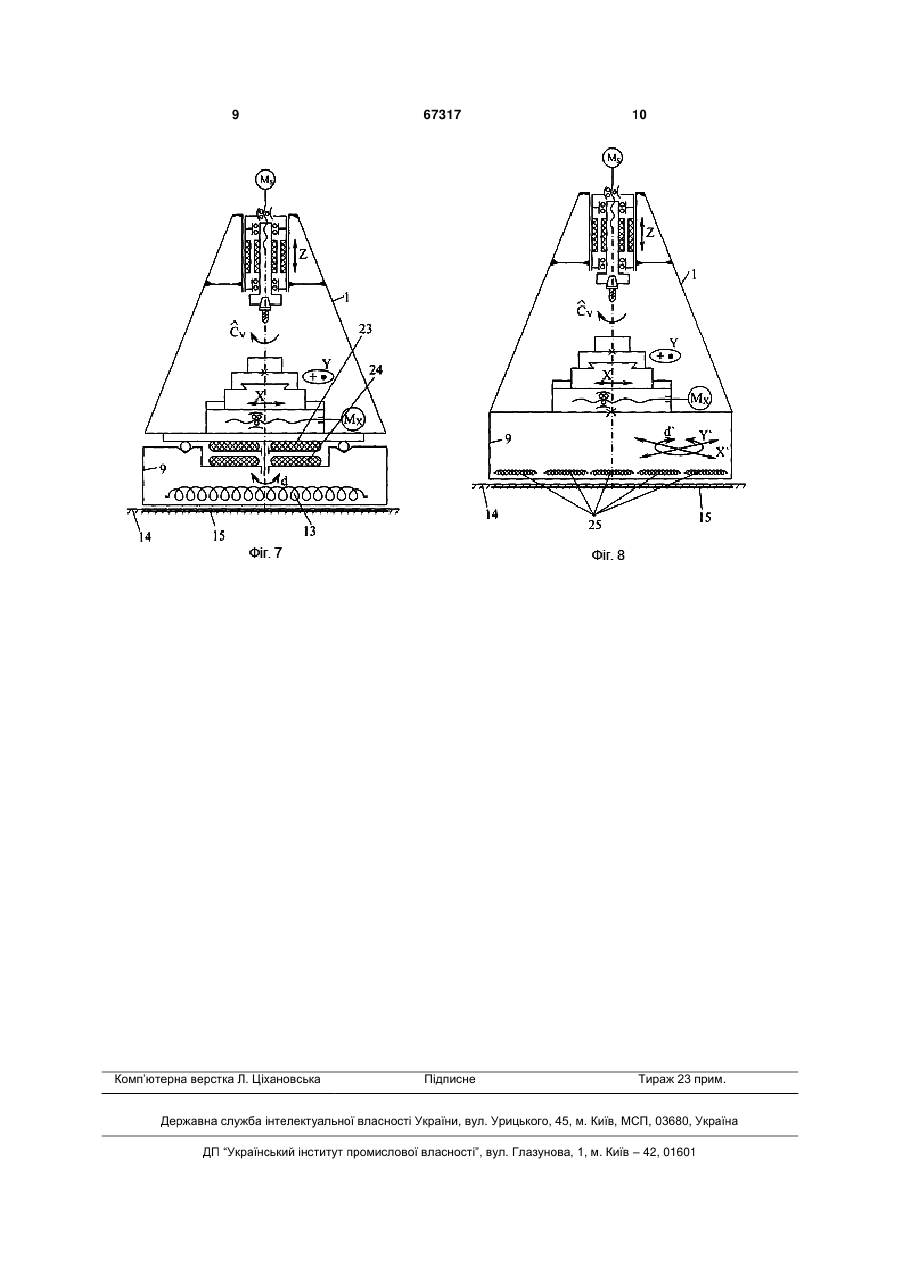
1. Багатокоординатний свердлильнофрезерний верстат, що містить несучу систему, виконану у вигляді або оболонкової просторової фігури правильної форми з основою у вигляді багатогранника, або круга, розташовану на нерухомій підлозі, шпиндельний вузлопінольного типу з інструментальною системою на рухомій або нерухомій платформі з приводом головного руху і вертикальної подачі або без неї і двокоординатний хрестоподібний стіл, зверху якого розташована заготовка, що обробляється, який відрізняється тим, що несуча система і основа виконані рухомими одна відносно одної або відносно нерухомої підлоги. 2. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що несу U 2 67317 1 3 Відомий також багатокоординатний свердлильно-фрезерний верстат [2], прийнятий як найближчий аналог що містить несучу систему, виконану у вигляді каркасної або оболонкової просторової фігури правильної форми з основою у вигляді багатогранника або круга, розташованою на нерухомій підлозі, шпиндельний вузол пінольного типу з інструментальною системою на рухомій платформі з приводом головного руху і вертикальної подачі або без неї і двокоординатний хрестоподібний стіл, зверху якого розташована заготовка. Недоліком найближчого аналога є стаціонарне розташування верстата відносно транспортних потоків руху заготовок, що призводить до необхідності вирішення транспортних задач переміщення деталей між робочими місцями за рахунок збільшення транспортних засобів (промислових роботів, робокарів, завантажувальноперевантажувальних пристроїв та іншого додаткового обладнання). В основу корисної моделі поставлена задача удосконалення багатокоординатного свердлильнофрезерного верстату шляхом введення додаткового руху несучої системи відносно основи або вільного руху верстата відносно нерухомої підлоги в межах визначеного простору, що дозволяє досягнути технічний результат - забезпечити мобільність і адаптацію верстата до навколишнього середовища і зменшити кількість додаткових транспортних засобів в умовах гнучкого автоматизованого виробництва. Поставлена задача вирішується тим, що несуча система і основа виконані рухомими одна відносно одної або відносно нерухомої підлоги. Завдяки введенню додаткових рухів до несучої системи (її поворот на запрограмований кут) або виконанню основи з поступовими рухами по підлозі в будь-якому напрямку дозволяє верстату пристосуватися до навколишнього середовища при завантаженні заготовок, розвантаженні готових деталей і зміні свого положення на зменшених робочих площах дільниці або цеха в умовах гнучкого автоматизованого виробництва. При цьому транспортні засоби і шляхи транспортування скорочуються. Суть корисної моделі пояснюється кресленнями, де зображено: на фіг.1 - кінематична схема верстата з несучою системою у вигляді симетричної чотиригранної зрізаної піраміди, у верхній частині якої розміщений інструментальний виконавчий орган пінольного типу з механізмами вертикальної подачі та повороту несучого каркасу відносно основи; на фіг.2 - кінематична схема верстата з несучою системою у вигляді симетричної чотиригранної зрізаної піраміди, у верхній частині якої розміщений інструментальний виконавчий орган пінольного типу з механізмом вертикальної подачі, вмонтованим в основу ротором лінійного електродвигуна; фіг.3 - кінематична схема варіанта верстата з поворотною несучою системою у вигляді симетричної багатогранної піраміди, з рухомою платформою на штангах постійної довжини; фіг.4 - кінематична схема варіанта верстата з поворотною несучою системою у вигляді просторо 67317 4 вої рамної конструкції, з рухомою платформою на штангах змінної довжини; фіг.5 - кінематична схема верстата з поворотною несучою системою у вигляді симетричної чотиригранної зрізаної піраміди і основи, яка може переміщуватися в довільному напрямку вздовж підлоги; фіг.6 - кінематична схема верстата з поворотною несучою системою від плоскотороїдального електродвигуна; фіг.7 кінематична схема верстата з поворотною несучою системою у вигляді симетричної чотиригранної зрізаної піраміди, як на фіг.6, з додатковим переміщенням основи в довільному напрямку вздовж підлоги за рахунок вмонтованого ротора лінійного електродвигуна; фіг.8 - кінематична схема верстата з несучою системою аналогічного зображеного на фіг.2, в основу якого вмонтована система лінійних електродвигунів, що забезпечує точне позиціонування основи верстата на площині підлоги, яка виконана як статор лінійного електродвигуна. Багатокоординатний свердлильно-фрезерний верстат містить несучу систему 1 (фіг.1), виконану у вигляді симетричної чотиригранної зрізаної піраміди, у верхній частині якої розміщений інструментальний виконавчий орган 2 пінольного типу з механізмом вертикальної подачі 3 від крокового електродвигуна 4. Інструмент 5 закріплений в мотор-шпинделі 6. В нижній частині несучої системи 1 розташований двокоординатний хрестоподібний стіл 7 з керованими переміщеннями від крокових електродвигунів по координаті X і аналогічно координаті У (двигун не показаний). На столі 7 встановлена заготовка 8, що обробляється. Поворот несучої системи 1, (координата d) розташований на основі 9 за допомогою кругових напрямних кочення 10, забезпечується від електродвигуна 11 через зубчасту передачу 12, наприклад черв'ячну. Верстат працює наступним чином. На стіл 7 встановлюється і закріплюється заготовка 8 за допомогою завантажувальнорозвантажувального пристрою (на фіг.1 не показаний). Вмикається привод обертання інструмента 5 (координата Cv), а далі по програмі виконується обробка заготовки 8. Програма обробки задається системою числового програмного керування (ЧПК), на фіг.1 не показана, що дає відповідні сигнали формоутворюючих рухів електродвигунам подач по координатах X, Y, Z. При необхідності зміни кутового положення несучої системи 1 згідно з програмою подається команда на електродвигун 11 (М), який забезпечує поворотний рух через черв'ячну передачу 12 на відповідний кут (координата d), якщо це передбачено в роботі гнучкого автоматизованого виробництва, наприклад для завантаження заготовки, розвантаження готової деталі або розв'язання передбачених транспортних задач. Можливі різні варіанти реалізації додаткових рухів верстата в умовах його мобільності і адаптації при гнучкому автоматизованому виробництві. В варіанті верстата (фіг.2) в основу 9 вмонтований ротор 13 лінійного електродвигуна, що забезпечує поступовий рух основи 9 відповідно підлоги 14, в якій розташований статор 15 лінійного 5 електродвигуна, магнітопровід якого формує транспортну трасу для верстата в приміщені ділянки або цеха підприємства. В варіанті верстата (фіг.3) нижня частина з хрестоподібним столом 7, основою 9 виконана аналогічно зображеній на фіг.1, а рух інструментального органа - мотор-шпинделя 2, розташованого на рухомій платформі 15 із штангами постійної довжини 17 з шарнірами 18 та 19(не показано на фіг.3) на кінцях здійснюється завдяки переміщенню по напрямних повзунів 20 від окремих приводів (на фіг.3 не показані). Можливо використання для здійснення рухів платформи 16 відповідно каркасу несучої системи 1 іншої форми штанг керовано-змінної довжини 21 від приводів 22 при кінематиці інших рухів по аналогії з фіг.3. У варіанті верстата (фіг.3) в порівнянні з верстатом (фіг.1) основа 9 має додатковий поступовий рух відповідно підлоги 14 завдяки лінійному електродвигуну з ротором 13 і статором 15, як на фіг.2. Замість механічної зубчастої передачі (фіг.1) поворот несучої системи 1 верстата, зображеного на фіг.6, здійснюється від електродвигуна плоскотороїдальної форми, виконаного із ротора 23, зв'язаного з нижньою частиною несучої системи 1, і статора 24, зв'язаного з основою 9. 67317 6 Варіант верстата (фіг.7) реалізує виконання додаткових рухів несучої системи 1 і основи 9, як це здійснено у варіантах на фіг.5 і 6. В порівнянні з варіантом верстата (фіг.5) в основу 9 верстата (фіг.8) вмонтована система лінійних електродвигунів 25, що забезпечує позиціювання основи верстата на площині підлоги 14, яка виконана як статор 15 лінійного електродвигуна. Відмінність від відомих варіантів запропонованої конструкції полягає в забезпеченні вільної орієнтації верстата в робочому просторі виробництва. Свердлильно-фрезерний верстат може знайти широке використання в машинобудуванні для використання в гнучких виробничих комплексах та системах. Джерела інформації: 1. Патент України на винахід №35576. Багатокоординатний свердлильно-фрезерний верстат. Кузнецов Ю.М. МПК B23Q1/00, В23В39/00, опубл. 27.04.2009, бюл. №8. 2. Багатокоординатний свердлильнофрезерний верстат. Кузнецов Ю.М., Фіранський В.Б., Степаненко О.О. МПК B23Q1/00, В23В39/00, Заявка на корисну модель №u201103750 від заявл. 28.03.2011. 7 67317 8 9 Комп’ютерна верстка Л. Ціхановська 67317 Підписне 10 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMultiaxis drilling and milling machine
Автори англійськоюKuznietsov Yurii Mykolaiovych, Shynkarenko Vasyl Fedorovych, Firanskyi Volodymyr Borysovych, Hamuiela Augustu Joachima Herra
Назва патенту російськоюМногокоординатный сверлильно-фрезерный станок
Автори російськоюКузнецов Юрий Николаевич, Шинкаренко Василий Федорович, Фиранский Владимир Борисович, Хамуйела Аугушту Жоакима Герра
МПК / Мітки
МПК: B23Q 1/00, B23B 35/00, B23B 39/00
Мітки: свердлильно-фрезерний, багатокоординатний, верстат
Код посилання
<a href="https://ua.patents.su/5-67317-bagatokoordinatnijj-sverdlilno-frezernijj-verstat.html" target="_blank" rel="follow" title="База патентів України">Багатокоординатний свердлильно-фрезерний верстат</a>
Багатокоординатний свердлильно-фрезерний верстат

Номер патенту: 64422
Опубліковано: 10.11.2011
Автори: Фіранський Володимир Борисович, Кузнєцов Юрій Миколайович, Степаненко Олександр Олександрович
МПК: B23Q 1/00, B23B 39/00, B23B 35/00
Мітки: свердлильно-фрезерний, верстат, багатокоординатний
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить несучу систему з верхньою і нижньою основами, жорстко зв'язаними між собою, розташований на верхній основі інструментальний виконавчий орган з приводом обертання інструмента, а на нижній основі - поворотний стіл і супорт з можливістю поступового його переміщення в горизонтальній площині по двох координатах, який відрізняється тим, що несуча система виконана у вигляді каркасної...
Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 86533
Опубліковано: 27.04.2009
Автори: Кузнєцов Юрій Миколайович, Дмитрієв Дмитро Олексійович, Діневич Григорій Юхимович
МПК: B23B 39/00, B23Q 1/00
Мітки: свердлильно-фрезерний, верстат, багатокоординатний
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, три штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструменту, який відрізняється тим, що осі механізмів...
Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 35576
Опубліковано: 25.09.2008
Автор: Кузнєцов Юрій Миколайович
МПК: B23C 1/00, B23B 39/00
Мітки: багатокоординатний, верстат, свердлильно-фрезерний
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструмента, який відрізняється тим, що опори осей механізмів...
Багатокоординатний фрезерний верстат

Номер патенту: 66830
Опубліковано: 25.01.2012
Автори: Степаненко Олександр Олександрович, Дмитрієв Дмитро Олексійович, Фіранський Володимир Борисович, Кузнєцов Юрій Миколайович
МПК: B23C 1/00, B23B 35/00
Мітки: багатокоординатний, верстат, фрезерний
Формула / Реферат:
Багатокоординатний фрезерний верстат, що містить верхню і нижню основи, механізми поступового руху постійної довжини, шарнірно зв'язані між собою через штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструмента, причому опори осей механізмів поступового руху утворюють в нижній частині...
Свердлильно-фрезерний верстат
Номер патенту: 66672
Опубліковано: 10.01.2012
Автори: Дмитрієв Дмитро Олексійович, Кузнєцов Юрій Миколайович, Фіранський Володимир Борисович
МПК: B23Q 1/00, B23B 39/00
Мітки: верстат, свердлильно-фрезерний
Формула / Реферат:
1. Свердлильно-фрезерний верстат, що містить несучу нерухому частину, верхню і нижню основу, штанги постійної або керовано-змінної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступального руху, а другі - з платформою, на якій розташований виконавчий орган, який відрізняється тим, що верхня основа зведена до мінімальних розмірів, а саме, точки, лінії, або будь-якого плоского багатокутника, круга або каркаса...
Попередній патент: Спосіб скошеного анастомозування при динамічній тонкокишковій непрохідності
Наступний патент: Спосіб елементного аналізу рідкого матеріалу
Випадковий патент: Спосіб формування сигналів одноканального керування літального апарата, що обертається за креном