Багатокоординатний фрезерний верстат
Номер патенту: 66830
Опубліковано: 25.01.2012
Автори: Степаненко Олександр Олександрович, Кузнєцов Юрій Миколайович, Фіранський Володимир Борисович, Дмитрієв Дмитро Олексійович



Формула / Реферат
Багатокоординатний фрезерний верстат, що містить верхню і нижню основи, механізми поступового руху постійної довжини, шарнірно зв'язані між собою через штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструмента, причому опори осей механізмів поступового руху утворюють в нижній частині прямокутник, а бокові грані з нижньою основою утворюють два рівнобедрених трикутники, верхні вершини яких мають по одній точці перетинання на верхній основі по її кінцях, з одних взаємно протилежних сторін, і разом з верхньою основою - два прямокутники або дві рівнобічні трапеції, з інших сторін площини мають спільну лінію перетинання, перетворюючи верхню основу в траверсу-балку на двох опорах-трикутниках, який відрізняється тим, що в механізмі поступового руху на нижніх кінцях напрямних повздовжнього переміщення встановлені шарніри з можливістю їх переміщення вздовж напрямних, розташованих на нижній опорі і відповідного переміщення верхньої опори - траверси-балки.
Текст
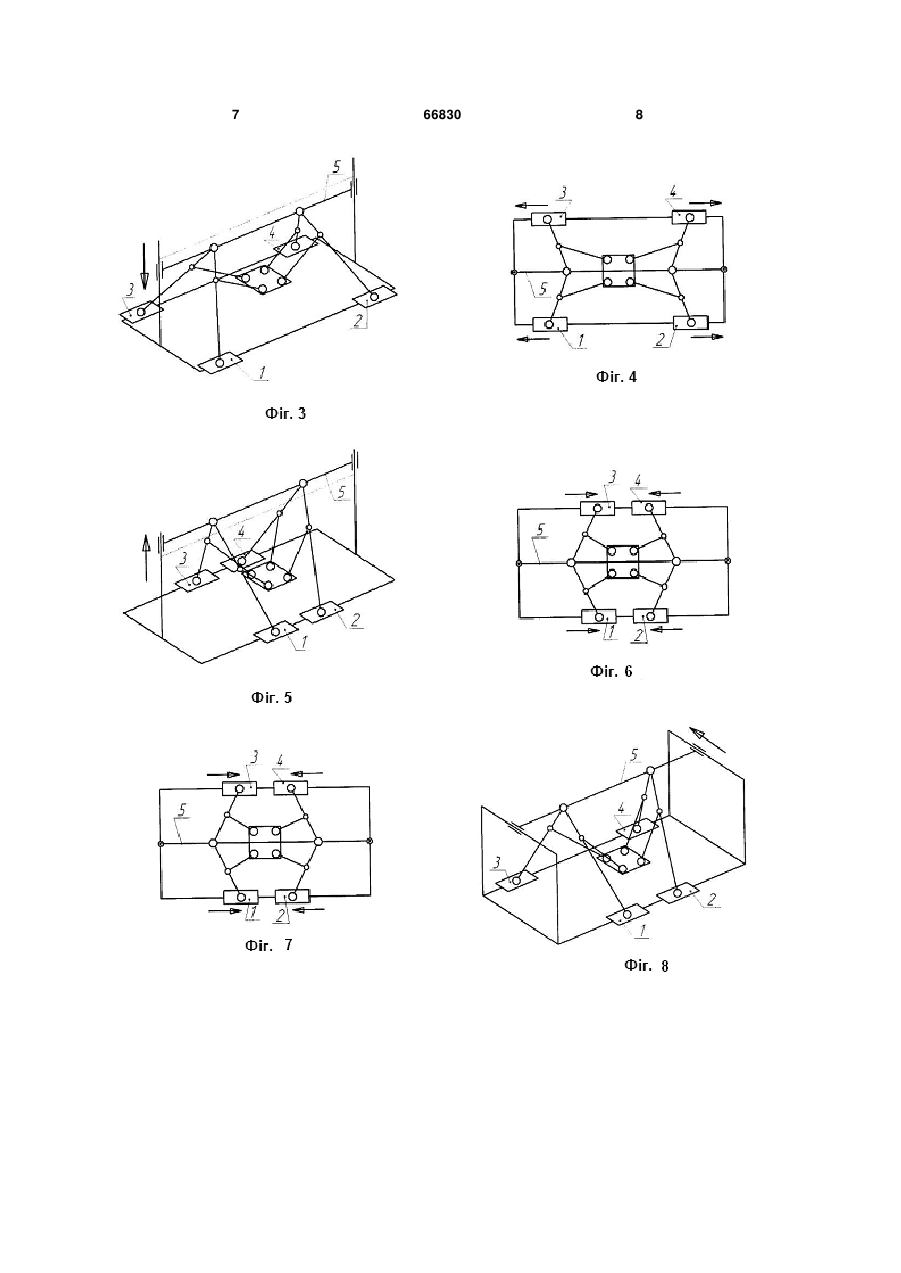
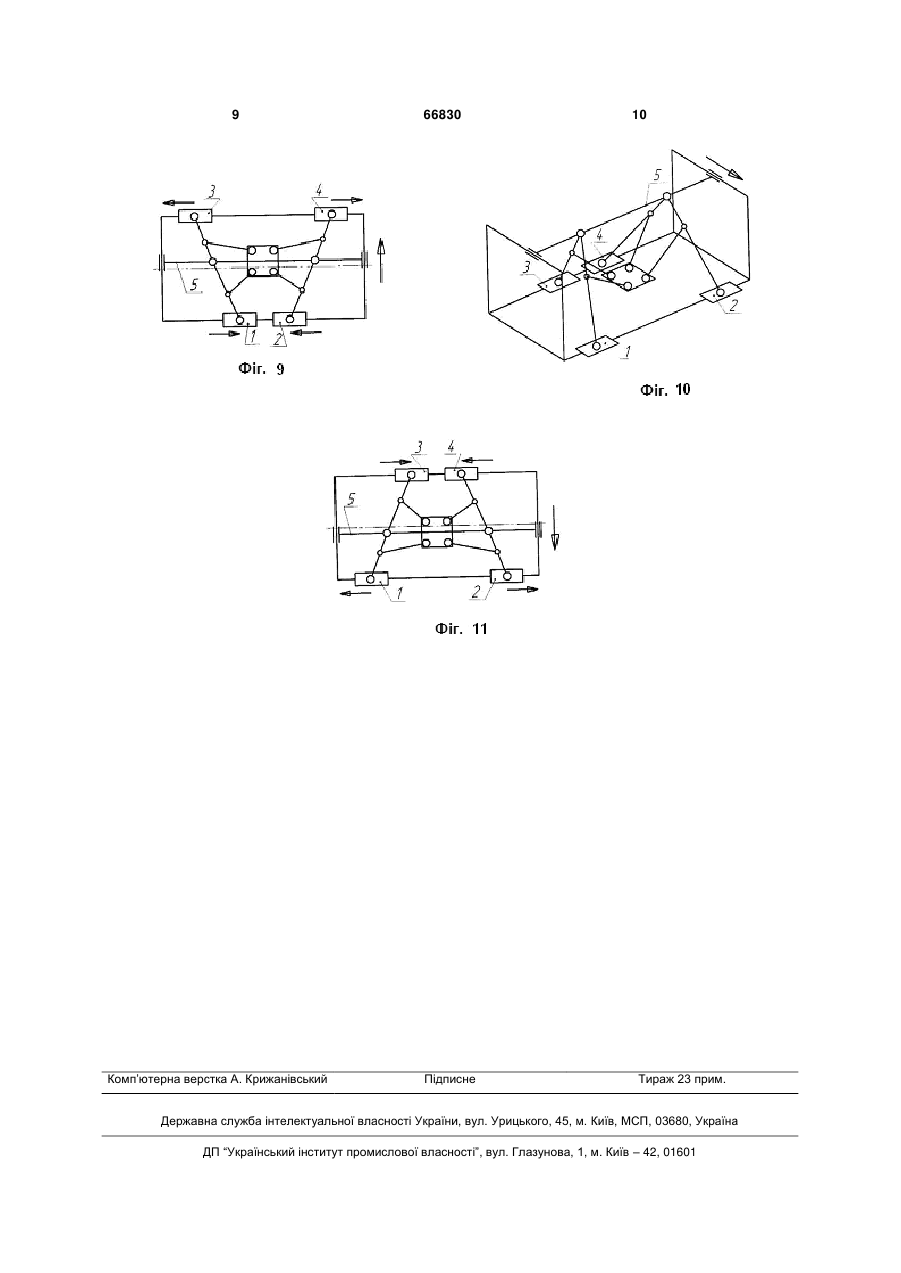
Багатокоординатний фрезерний верстат, що містить верхню і нижню основи, механізми поступового руху постійної довжини, шарнірно зв'язані між собою через штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, 3 Недоліком прототипу є неефективне співвідношення між робочою зоною верстата та його габаритами. Задача, яку вирішує корисна модель, полягає в тому, що багатокоординатний фрезерний верстат, що містить верхню і нижню основи, механізми поступового руху постійної довжини, шарнірно зв'язані між собою через штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструмента, причому опори осей механізмів поступового руху утворюють в нижній частині прямокутник, а бокові грані з нижньою основою утворюють два рівнобедрених трикутники, верхні вершини яких мають по одній точці перетинання на верхній основі по її кінцях, з одних взаємно протилежних сторін, і разом з верхньою основою - два прямокутники або дві рівнобічні трапеції, з інших сторін площини мають спільну лінію перетинання, перетворюючи верхню основу в траверсу-балку на двох опорах-трикутниках, причому на нижніх кінцях напрямних повздовжнього переміщення встановлені шарніри з можливістю їх переміщення вздовж напрямних, розташованих на нижній опорі і відповідного переміщення верхньої опори - траверсибалки, це дозволяє нам збільшити співвідношення між об'ємом робочої зони верстата та його габаритами. Вказана задача вирішується завдяки тому, що в механізмі поступового руху на нижніх кінцях напрямних повздовжнього переміщення встановлені шарніри з можливістю їх переміщення вздовж напрямних, розташованих на нижній опорі і відповідного переміщення верхньої опори - траверсибалки. Суть корисної моделі пояснюється кресленнями, де на Фіг. 1, 2 зображено загальний вигляд запропонованого верстата з можливими варіантами компоновки для регулювання об'єму робочої зони по вертикалі і горизонталі, на Фіг.3, 4, 5, 6 зображено можливі варіанти положення кінематичних ланок верстата для регулювання висоти робочої зони по вертикалі, на Фіг.7, 8, 9, 10 зображено можливі варіанти положення кінематичних ланок верстата для регулювання ширини робочої зони по горизонталі. Верстат (Фіг.1) містить нижню основу 1, на якій розміщені ходові гвинти 2, 3 з лівою і правою різьбою, вони приводять в рух каретки 4, 5, 6, 7, які 66830 4 шарнірами 8, 9, 10, 11 зв'язані з напрямними 12, 13, 14, 15. Оскільки протилежні кінці цих напрямних шарнірами 16, 17, 18, 19 зв'язані з траверсоюбалкою 20, це викликає вертикальне переміщення траверси-балки 20 по напрямних 21, 22, які розташовані на стійках 23, 24 таким чином відбувається регулювання робочої зони верстата по висоті. Для фіксації траверси-балки 20 можуть бути використані електромагнітні муфти 25, 26. Ходові гвинти 2, 3 можуть бути приведені в рух як вручну, так і за допомогою крокових двигунів 27, 28. Формоутворюючі рухи верстата отримуються шляхом переміщення по напрямних 12, 13, 14, 15 кареток 29, 30, 1, 32 які шарнірно зв'язані зі штангами постійної довжини 33, 34, 35, 36, які, в свою чергу, шарнірно зв'язані з платформою 37, на якій встановлений мотор-шпиндель 38. Каретки 29, 30, 31, 32 приводяться в рух через ходові гвинти кроковими двигунами 39, 40, 41, 42. Верстат (Фіг.2) має аналогічну будову і принцип дії як і верстат, зображений на Фіг.1, за виключенням того, що балка-траверса 20 має змогу рухатися по напрямних 43 в горизонтальній площині, які розміщені на балках 44, 45. Таким чином відбувається регулювання робочої зони верстата по ширині. Кінематичні схеми (Фіг.3-10) показують можливі варіанти положення кінематичних ланок верстата. Якщо каретки 1, 2, 3, 4 (Фіг.3, 4) розведені балка-траверса 5 опускається вниз по вертикалі. Якщо каретки 1, 2, 3, 4 (Фіг.5, 6) зведені - балкатраверса 5 підіймається вгору. Якщо каретки 1, 2 (Фіг.7, 8) зведені, а каретки 3, 4 розведені - балкатраверса 5 рухається вперед по горизонталі. Якщо каретки 1, 2 (Фіг.9, 10) розведені, а каретки 3, 4 зведені - балка-траверса 5 рухається назад по горизонталі. Таким чином поставлена задача - збільшення співвідношення між об'ємом робочої зони верстата та його габаритами вирішується. Відмінність запропонованої конструкції полягає в тому, що сукупність основних ознак надає конструкції нові, невідомі раніше властивості - можливість зміни форми і розмірів робочого простору верстата та розширення технологічних можливостей. Багатокоординатний фрезерний верстат може знайти широке використання в машинобудуванні для формоутворення складних фасонних поверхонь. 5 66830 6 7 66830 8 9 Комп’ютерна верстка А. Крижанівський 66830 Підписне 10 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMulti-axis milling machine
Автори англійськоюKuznietsov Yurii Mykolaiovych, Dmytriev Dmytro Oleksiiovych, Firanskyi Volodymyr Borysovych, Stepanenko Oleksandr Oleksandrovych
Назва патенту російськоюМногокоординатный фрезерный станок
Автори російськоюКузнецов Юрий Николаевич, Дмитриев Дмитрий Алексеевич, Фиранский Владимир Борисович, Степаненко Александр Александрович
МПК / Мітки
МПК: B23C 1/00, B23B 35/00
Мітки: верстат, багатокоординатний, фрезерний
Код посилання
<a href="https://ua.patents.su/5-66830-bagatokoordinatnijj-frezernijj-verstat.html" target="_blank" rel="follow" title="База патентів України">Багатокоординатний фрезерний верстат</a>
Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 35576
Опубліковано: 25.09.2008
Автор: Кузнєцов Юрій Миколайович
МПК: B23B 39/00, B23C 1/00
Мітки: багатокоординатний, верстат, свердлильно-фрезерний
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструмента, який відрізняється тим, що опори осей механізмів...
Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 86533
Опубліковано: 27.04.2009
Автори: Діневич Григорій Юхимович, Дмитрієв Дмитро Олексійович, Кузнєцов Юрій Миколайович
МПК: B23Q 1/00, B23B 39/00
Мітки: багатокоординатний, верстат, свердлильно-фрезерний
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, три штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструменту, який відрізняється тим, що осі механізмів...
Багатокоординатний свердлильно-фрезерний верстат

Номер патенту: 64422
Опубліковано: 10.11.2011
Автори: Кузнєцов Юрій Миколайович, Фіранський Володимир Борисович, Степаненко Олександр Олександрович
МПК: B23Q 1/00, B23B 39/00, B23B 35/00
Мітки: багатокоординатний, верстат, свердлильно-фрезерний
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить несучу систему з верхньою і нижньою основами, жорстко зв'язаними між собою, розташований на верхній основі інструментальний виконавчий орган з приводом обертання інструмента, а на нижній основі - поворотний стіл і супорт з можливістю поступового його переміщення в горизонтальній площині по двох координатах, який відрізняється тим, що несуча система виконана у вигляді каркасної...
Свердлильно-фрезерний верстат
Номер патенту: 66672
Опубліковано: 10.01.2012
Автори: Дмитрієв Дмитро Олексійович, Кузнєцов Юрій Миколайович, Фіранський Володимир Борисович
МПК: B23B 39/00, B23Q 1/00
Мітки: свердлильно-фрезерний, верстат
Формула / Реферат:
1. Свердлильно-фрезерний верстат, що містить несучу нерухому частину, верхню і нижню основу, штанги постійної або керовано-змінної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступального руху, а другі - з платформою, на якій розташований виконавчий орган, який відрізняється тим, що верхня основа зведена до мінімальних розмірів, а саме, точки, лінії, або будь-якого плоского багатокутника, круга або каркаса...
Верстат-гексапод
Номер патенту: 54937
Опубліковано: 17.03.2003
Автори: Валявський Іван Анатолійович, Крижанівський Володимир Андрійович
МПК: B21D 5/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, який складається з нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами, який відрізняється тим, що шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі.
Попередній патент: Спосіб моделювання грибкового кератиту
Наступний патент: Імпульсне джерело електромагнітного випромінювання
Випадковий патент: Пристрій очищення води