Багатокоординатний свердлильно-фрезерний верстат
Формула / Реферат
1. Багатокоординатний свердлильно-фрезерний верстат, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструмента, який відрізняється тим, що опори осей механізмів поступового руху утворюють в нижній основі прямокутник, а бокові грані з нижньою основою утворюють два рівнобедрених трикутники, верхні вершини яких мають по одній точці перетинання на верхній основі по її кінцях, з одних взаємно протилежних сторін, і разом з верхньою основою - два прямокутники або дві рівнобічні трапеції, з інших сторін, площини яких мають спільну лінію перетинання, перетворюючи верхню основу в траверсу-балку на двох опорах-трикутниках.
2. Верстат за п. 1, який відрізняється тим, що на нижній основі розташовані поворотний стіл і супорт з можливістю поступового переміщення в горизонтальній площині по двох координатах.
3. Верстат за п. 1, який відрізняється тим, що інструментальний виконавчий орган додатково оснащений механізмом поступового руху.
Текст
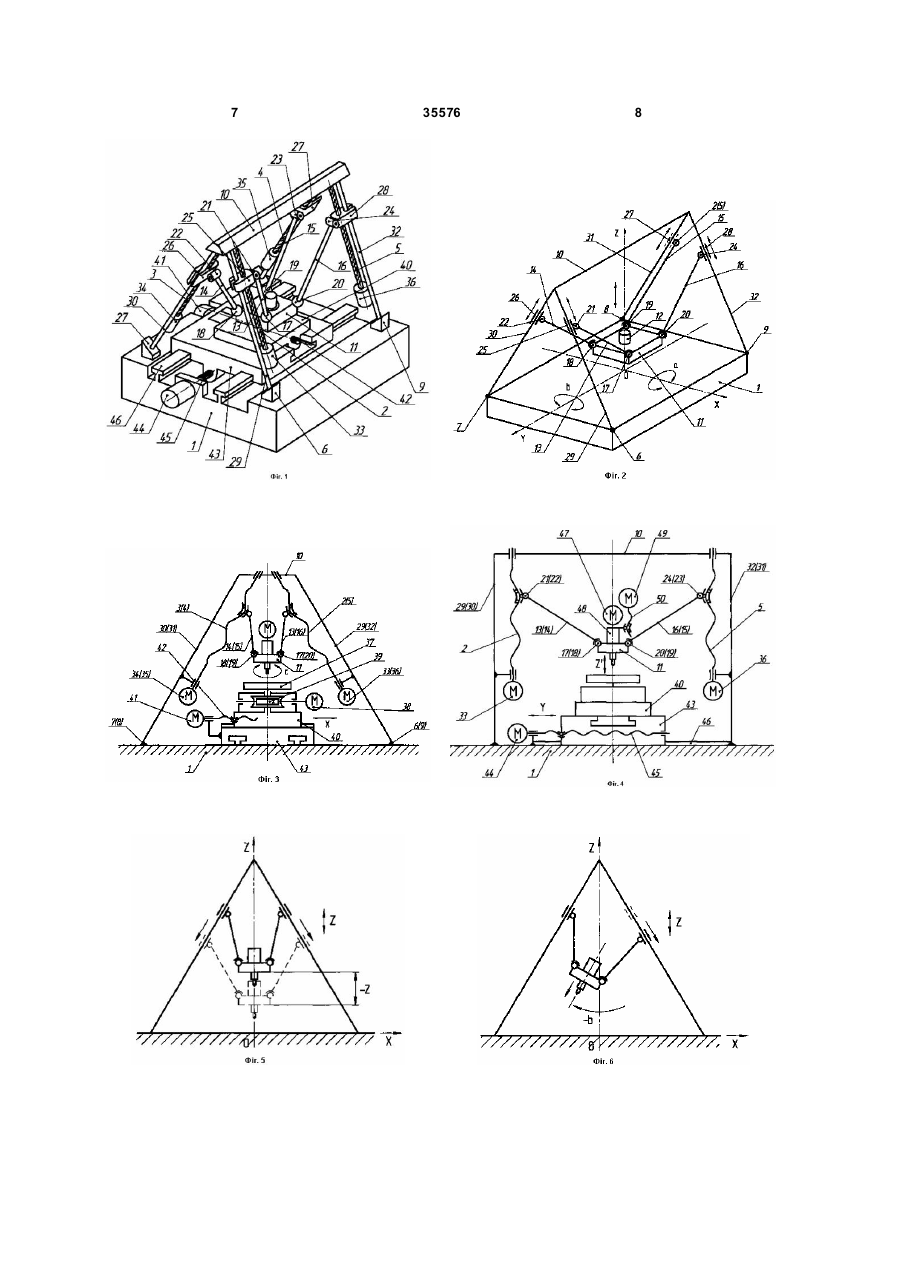
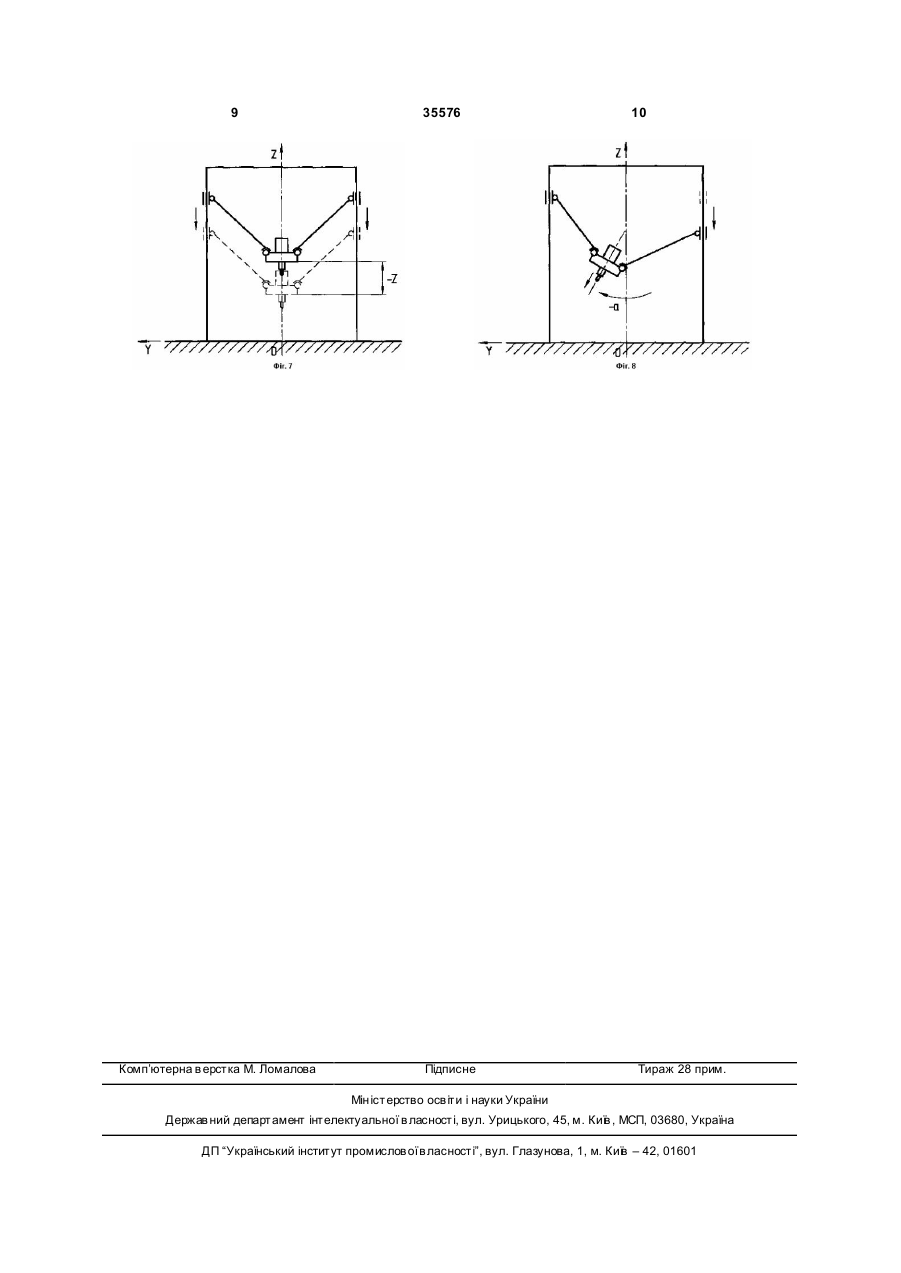
1. Багатокоординатний свердлильнофрезерний верстат, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструмента, який відрізняється тим, що опори осей механізмів поступо 3 35576 робочого простору, а також складна конструкція та висока вартість штанг змінної довжини. Не звільнена від зазначених недоліків і конструкція [5], яка має плоску основу для трьох штанг змінної довжини і центральну штангу з сферичною опорою в місті з'єднання з фрезерною високошвидкісною головкою. Як найбільш близький аналог обраний багатокоординатний свердлильно-фрезерний верстат [5], що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструменту. До недоліків прототипу відносяться: по-перше, збільшення габаритів і металоємності верстата, що викликано паралельним виконанням трьох механізмів поступового руху і необхідністю застосування верхньої основи таких же розмірів, як і нижня основа; по-друге, знижена жорсткість пружної системи, що потребує підвищення моментів опору поперечних перерізів механізмів поступового руху і таким чином збільшення металоємності конструкції; по-третє, обмежена кількість координатних рухів, що звужує те хнологічні можливості верстата. В основу корисної моделі поставлена задача удосконалення багатокоординатного свердлильнофрезерного верстата шляхом того, що опори осей механізмів поступового руху утворюють в нижній основі прямокутник, а бокові грані - два рівнобедрених трикутника, з одних взаємо протилежних сторін, і два прямокутника або дві рівнобічні трапеції, з інших сторін, що дозволяє досягнути технічний результат - зниження металоємності і підвищення жорсткості конструкції. Крім того, введення поворотного столу, дво хкоординатного супорта і додаткового механізму поступового руху інструментального виконавчого органу дозволяє розширити технологічні можливості верстата. Вирішення поставленої задачі досягається тим, що в багатокоординатному свердлильнофрезерному верстаті, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, штанги постійної довжини, одні кінці яких з'єднані шарнірами з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструменту, згідно корисної моделі, новим є те, що опори осей механізмів поступового руху утворюють в нижній основі прямокутник, а бокові грані з нижньою основою утворюють два рівнобедрених трикутника, верхні вершини яких мають по одній точці перетинання на верхній основі по її кінцям, з одних взаємопротилежних сторін, і разом з верхньою основою - два прямокутника або дві рівнобічні трапеції, з інших сторін, площини яких мають спільну лінію перетинання, перетворюючи верхню основу в траверсу балку на двох опорах-трикутниках. 4 Завдяки загальній верхній опорі у вершині у вигляді траверси-балки розміри верхньої основи мають невеликі габарити, що знижує металоємність конструкції при підвищенні її жорсткості. Розташування на нижній основі поворотного столу, а також виконання супорту з можливістю поступового переміщення в горизонтальній площині по двох координатах і введення додаткового механізму поступового руху для інструментального виконавчого органу, дозволяє за рахунок трьох додаткових рухів суттєво розширити технологічні можливості верстата. Суть корисної моделі пояснюється кресленнями, де на Фіг.1 зображено загальний вигляд запропонованого верстата в аксонометрії, Фіг.2 принципову компоновочну схему вер хньої частини верстата в системі координат X, Y, Z; Фіг.3 - кінематичну схему верстата з механізмами подачі під кутами у вигляді кульково-гвинтових передач, осі яких перетинаються у вершині рівнобедреного трикутника, поворотним столом для заготовки і поперечним рухом супорта; Фіг.4 - кінематичну схему верстата з механізмами подачі у вигляді кульково-гвинтових передач в площині прямокутника, механізмом поздовжньої подачі супорта паралельно верхній основі-траверсі і додатковим механізмом поступового руху інстр ументального виконавчого органу; Фіг.5 - схема вертикальних координатних рухів по осі Z платформи з виконавчим інструментальним органом в площині рівнобічного трикутника; Фіг.6 - кутове переміщення -b виконавчого інструментального органа навколо осі Y в площині рівнобедреного трикутника; Фіг.7 схема вертикальних рухів по осі Z виконавчого інструментального органа в площині прямокутника; Фіг.8 - кутове переміщення -а виконавчого інструментального органа навколо осі X. Верстат містить нижню основу 1 (Фіг.1), чо тири механізми поступового руху 2, 3, 4, 5, наприклад, кулькові гвинтові передачі з опорами 6, 7, 8, 9 (Фіг.1, 2), відповідно в нижній основі 1 (опора 8 на Фіг.1 не показана) і опорами у верхній основі 10, де перетинаються осі механізмів поступового руху 2, 3 і 4, 5 відповідно, що утворює два рівнобедрених трикутника. Основа 10 розташована над платформою 11 з інструментальним виконавчим органом 12, оснащеним приводом обертання інструменту, наприклад, високошвидкісним моторшпинделем (електричним або пневматичним). Платформа 11 зв'язана з механізмами поступового руху за допомогою штанг постійної довжини 13, 14, 15, 16, на кінцях яких розташовані шарніри 17, 18, 19, 20 з боку платформи і шарніри 21, 22, 23, 24 з боку поступово рухомих повз унів 25, 26, 27, 28, отримуючих р ух від механізмів 2, 3, 4, 5 відповідно. Жорстку конструкцію верхньої частини з основою 10, виконаною у вигляді траверси - балки на двох опорах - трикутниках, утворює клиновидна (кришоподібна) ферма, боковими гранями якої є напрямні 29, 30, 31,31 (Фіг.2, на Фіг.1 напрямна 31 не показана) під повзуни 25, 26, 27, 28 відповідно. Кожний механізм поступового руху 2, 3, 4, 5 оснащений самостійним приводом, наприклад, у 5 35576 вигляді електродвигунів 33, 34, 35, 36 відповідно (Фіг.1). Для додаткового переміщення заготовки (не показана) по координаті „с" (обертання до 180° і більше) виконаний поворотний стіл 37 (Фіг.3) з приводом обертання від електродвигуна 38 через механічну черв'ячну передачу 39, розташовану в нижній основі 1 на супорті 40 поперечної подачі. Супорт 40 має привід від електродвигуна 41 через кульково-гвинтову передачу 42 (Фіг.1, 3) - переміщення по координаті X. Переміщення повзунів 25, 26, 27, 28 відповідно по напрямним 29, 30, 31, 32 здійснюється за допомогою механізмів поступового руху 2, 3, 4, 5 відповідно від крокових електродвигунів 33, 34, 35, 36. Переміщення заготовки по координаті Y за допомогою поздовжнього супорта 43 (Фіг.1, 4) здійснюється від електродвигуна 44 через кульковогвинтову передачу 45 по поздовжнім напрямним 46. Привід обертання інструменту здійснюється від електродвигуна 47 (Фіг.4), а його переміщення разом із шпинделем-піноллю 48 - від крокового електродвигуна 49 через кульково-гвинтову передачу 50. Таким чином верстат може мати максимум 7 керованих координатних рухів: поступові X, Y, Z, Z' і кутові а, b, с. Керування рухами верстата забезпечується системою числового програмного керування (ЧПК) (не показано), яке подає команди на електродвигуни 33, 34, 35, 36, 38, 41, 44, 49 (Фіг.1-4). Верстат працює наступним чином. Управління поступовими і кутовими подачами - рухами різального інструменту виконується системою ЧПК (Фіг.4) від чотирьох електродвигунів 33, 34, 35, 36, кожний з яких задає рух окремого механізму поступового руху 2, 3, 4, 5, на яких встановлені повзуни 25, 26, 27, 28 і від електродвигуна 49 переміщення шпинделя-пінолі 48. Якщо всі чотири повзуни 25, 26, 27, 28 переміщуються згідно стрілок вниз (Фіг.5 і 7) на однакову величину, то платформа 11 (Фіг.3, 7) опускається вниз (показано штрих-п унктирними лініями) на величину -Z, а штанги 13, 14, 15, 16 при цьому розходяться за рахунок трикутника (Фіг.5). Крайнє нижнє положення платформи, що визначає максимальне значення координати -Zmax можливе при певному розташуванні штанг 13, 14, 15, 16. Мож 6 лива така ситуація, при якій переміщення цих повзунів вниз приведе до підйому платформи 11. Може бути така ситуація, при якій дві штанги 14 і 15 нерухомі, а штанги 13 і 16 розведені (Фіг.2, 6) на однакову величину переміщення повзунів 25, 24, що приведе до обертання платформи 11 відносно осі координат Y на кут -b. Можлива і така ситуація, коли два повзуни 25, 26 (для штанг 13, 14) нерухомі (Фіг.2, 8), а два повзуни 28, 27 (для штанг 16, 15) рухаються вниз (Фіг.8), що поверне платформу 11 навколо осі Х на кут -а. Таким чином, змінюючи напрямок переміщення повзунів і положення штанг можна отримати різні лінійні (по координаті Z) і кутові положення (по координатах а і b) платформи з інструментом, а вводячи додаткові рухи інструменту (по координаті Z') і заготовки, установленої на поворотному столі (координата с) (Фіг.3) або двохкоординатному супорті (координати Х і Y) (Фіг.3, 4) можна додатково розширити технологічні можливості верстата по формоутворюючим рухам і виконанню різних операцій і різними ріжучими інструментами для багатоцільового верстата з магазином інструментів і автоматичної їх зміни [2, 3]. Джерела інформації: 1. Потапов В.А. На острие технического прогресса // Машиностроитель, 1998, №2, с. 52-58 (рис. 1, с. 52). 2. Агрегатно-модульне технологічне обладнання. Частина 3. Агрегатно-модульне технологічне обладнання нового покоління, його оснащення та інструментальне забезпечення. Під ред. проф. Кузнецова Ю.М. - Кіровоград. - 2003. - 508с. (рис. 19.22 і 19.24 на стор. 168-170). 3. Технологічне обладнання з паралельною кінематикою. Під ред. проф. Кузнецова Ю.М. - Кіровоград. - 200. - с. (рис. на стор.). 4. Валявський І.А., Крижанівський В.А. Тенденції розвитку верстатів паралельної структури // Вісник СумДУ, №2 (48), 2003. - с.18-22 (рис. 3). 5. Патент Німеччини №19955520, МПК B23Q1/70, В23К26/08, заявл. 18.11.1999, опубл. 31.05.2001. 6. Т.Н. Chang, S.L. Chen, Y.C. Lin, I.Inasaki. Post-Processor Development of a Hybrid TRR-XY Parallel Kinematic Machine Tool. Int &Adv Manuf Technol (2002) 20:259-269. Ownership and Copyright. © 2002 Springer - Verlag London Limited (fig. 1, fig. 5) 7 35576 8 9 Комп’ютерна в ерстка М. Ломалова 35576 Підписне 10 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMultuaxes drilling-milling machine
Автори англійськоюKuznietsov Yurii Mykolaiovych
Назва патенту російськоюМногокоординатный сверлильно-фрезерный станок
Автори російськоюКузнецов Юрий Николаевич
МПК / Мітки
МПК: B23C 1/00, B23B 39/00
Мітки: верстат, свердлильно-фрезерний, багатокоординатний
Код посилання
<a href="https://ua.patents.su/5-35576-bagatokoordinatnijj-sverdlilno-frezernijj-verstat.html" target="_blank" rel="follow" title="База патентів України">Багатокоординатний свердлильно-фрезерний верстат</a>
Фрезерний верстат
Номер патенту: 46008
Опубліковано: 15.05.2002
Автори: Якимів Михайло Васильович, Николишин Йосип Іванович, Остафійчук Роман Йосипович
МПК: B23C 1/00
Формула / Реферат:
1. Фрезерний верстат, що містить фундаментну основу, платформу для встановлення заготовок з елементами для встановлення і закріплення, і яка має поздовжні напрямні, шпиндель з фрезами, розділеними проміжними втулками, приводи обертання шпинделя і подачі, засоби електричного живлення приводів обертання шпинделя і подачі, який відрізняється тим, що шпиндель з фрезами і з приводом обертання встановлений на рухомому порталі, сполученому через...
Верстат-гексапод
Номер патенту: 54937
Опубліковано: 17.03.2003
Автори: Валявський Іван Анатолійович, Крижанівський Володимир Андрійович
МПК: B21D 5/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, який складається з нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами, який відрізняється тим, що шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі.
Буровий верстат
Номер патенту: 17109
Опубліковано: 15.09.2006
Автори: Хорунжий Володимир Дмитрович, Токарев Олексій Захарович, Лавренко Юрій Васильович, Шевченко Микола Іванович
Формула / Реферат:
1. Буровий верстат, що містить ходове устаткування, щоглу з механізмом напору та приводом для обертання штанги, змонтовану на платформі з консолями, що несуть домкрати вирівнювання машини, який відрізняється тим, що на кінці кожної консолі встановлено анкер з силовим циліндром, призначений для кріплення верстата на робочій позиції.2. Буровий верстат за п. 1, який відрізняється тим, кінцева частина кожної консолі, що несе анкер з...
Шліфувальний верстат
Номер патенту: 28792
Опубліковано: 16.10.2000
Автор: Пестунов Володимир Михайлович
МПК: B24B 5/00
Мітки: шліфувальний, верстат
Формула / Реферат:
1. Шліфувальний верстат, який складається з шліфувального круга, привода обертання круга та механізмів повздовжньої, поперечної та вертикальної подачі відносного руху формоутворення у системі інструмент-заготовка, який відрізняється тим, що привод головного обертального руху розташованийна поворотній відносно вертикальної вісі колоні та споряджені механізмом вертикальної подачі, а с протилежного боку колони встановлений шпіндель з механізмом...
Багатоопераційний верстат
Номер патенту: 5095
Опубліковано: 15.02.2005
Автори: Крамар Артем Володимирович, Пестунов Володимир Михайлович, Павленко Іван Іванович
МПК: B23B 11/00, B23Q 3/157, B23Q 15/00
Мітки: верстат, багатоопераційний
Формула / Реферат:
1. Багатоопераційний верстат, що містить передню бабку, задню бабку, які зв'язані з приводом обертового руху, і два супорти, які оснащені механізмом взаємно перпендикулярного руху подачі, який відрізняється тим, що супорти встановлені на траверсі, розташованій паралельно осям шпинделів передньої та задньої бабок і зв'язаній з механізмом вертикальної подачі.2. Верстат за п. 1, який відрізняється тим, що він оснащений попарно...
Попередній патент: Гнучкий виробничий модуль
Наступний патент: Котел-утилізатор
Випадковий патент: Виконавчий орган гірничого комбайна