Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 86533
Опубліковано: 27.04.2009
Автори: Діневич Григорій Юхимович, Дмитрієв Дмитро Олексійович, Кузнєцов Юрій Миколайович
Формула / Реферат
1. Багатокоординатний свердлильно-фрезерний верстат, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, три штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструменту, який відрізняється тим, що осі механізмів поступового руху мають одну точку перетинання, розташовану над платформою з інструментальним виконавчим органом, і розташовані по бічних ребрах правильної трикутної піраміди.
2. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що на нижній основі розташований поворотний стіл, вертикальна вісь повороту якого проходить через вершину правильної трикутної піраміди.
3. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що на нижній основі розташований супорт з можливістю поступового переміщення в горизонтальній площині по двох координатах.
4. Багатокоординатний свердлильно-фрезерний верстат за п. 1, який відрізняється тим, що на нижній основі розташовані поворотний стіл і супорт з можливістю поступового його переміщення в горизонтальній площині по двох координатах.
Текст
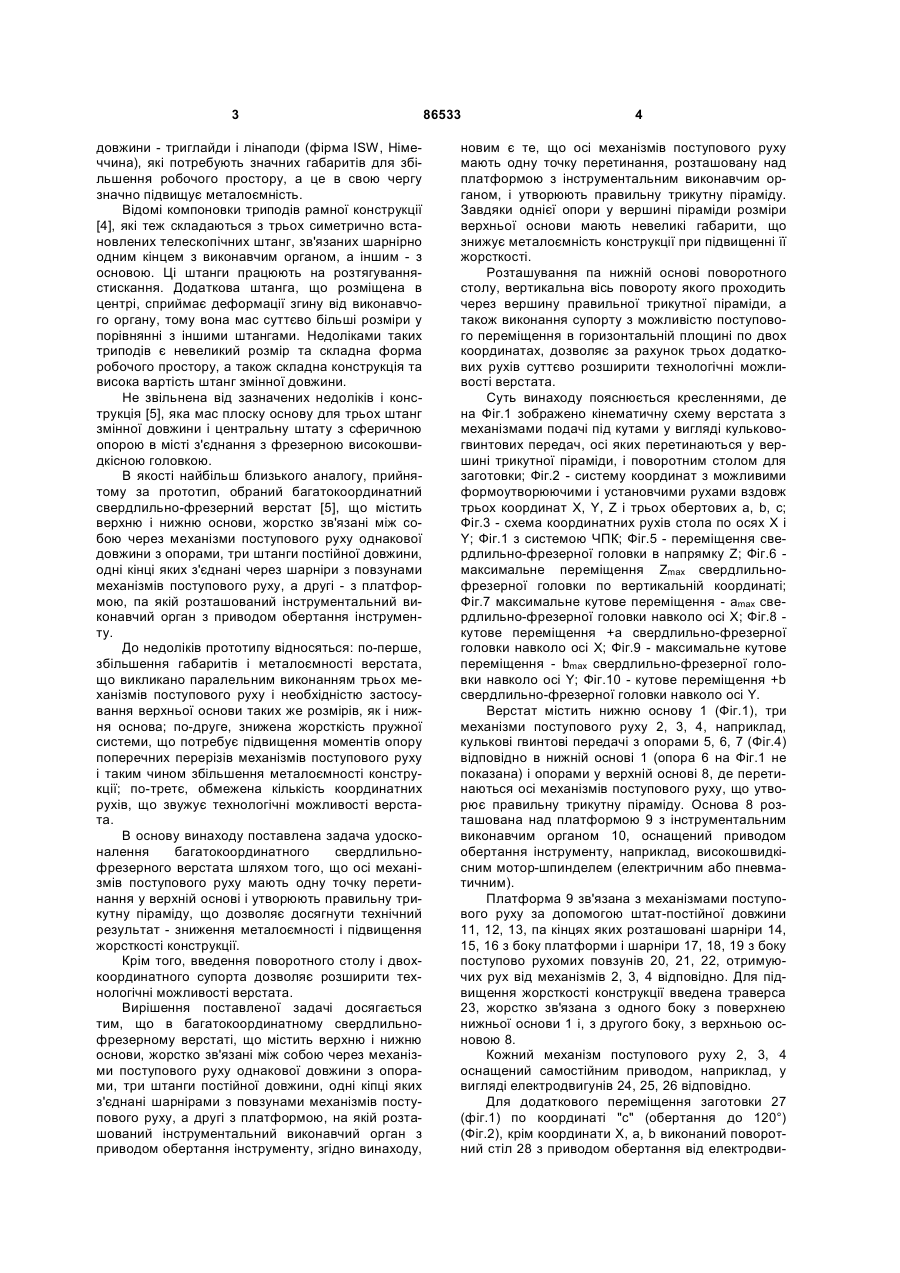
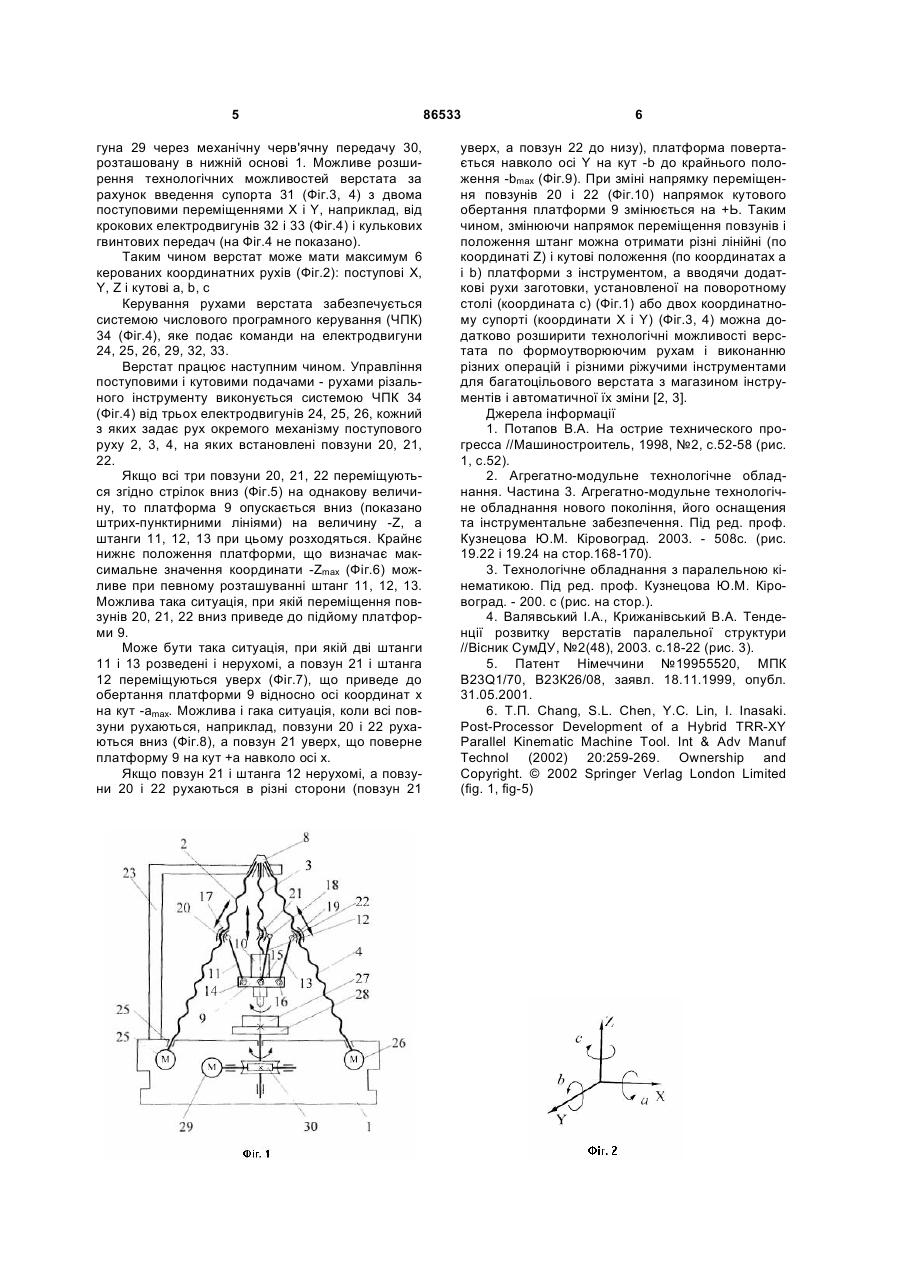
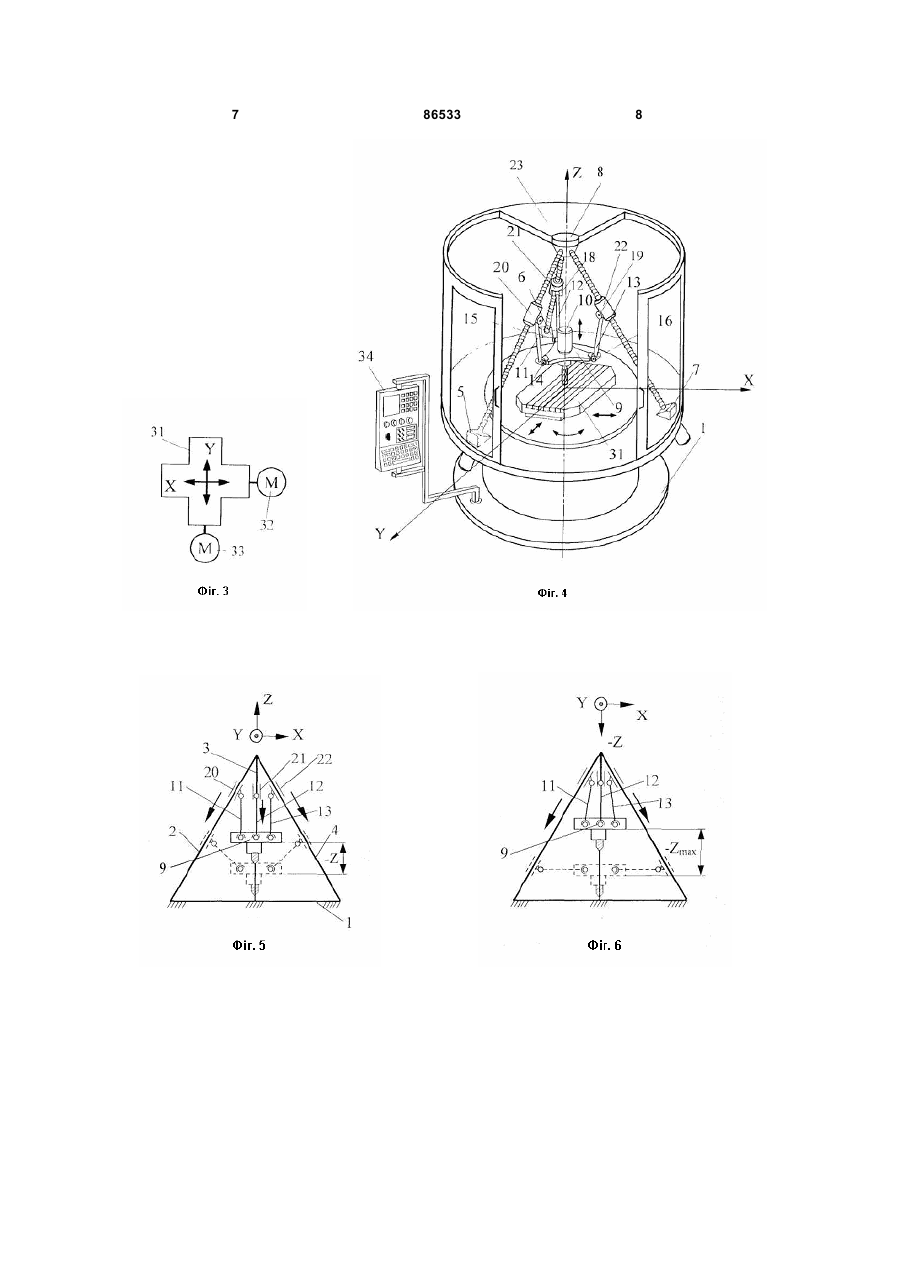
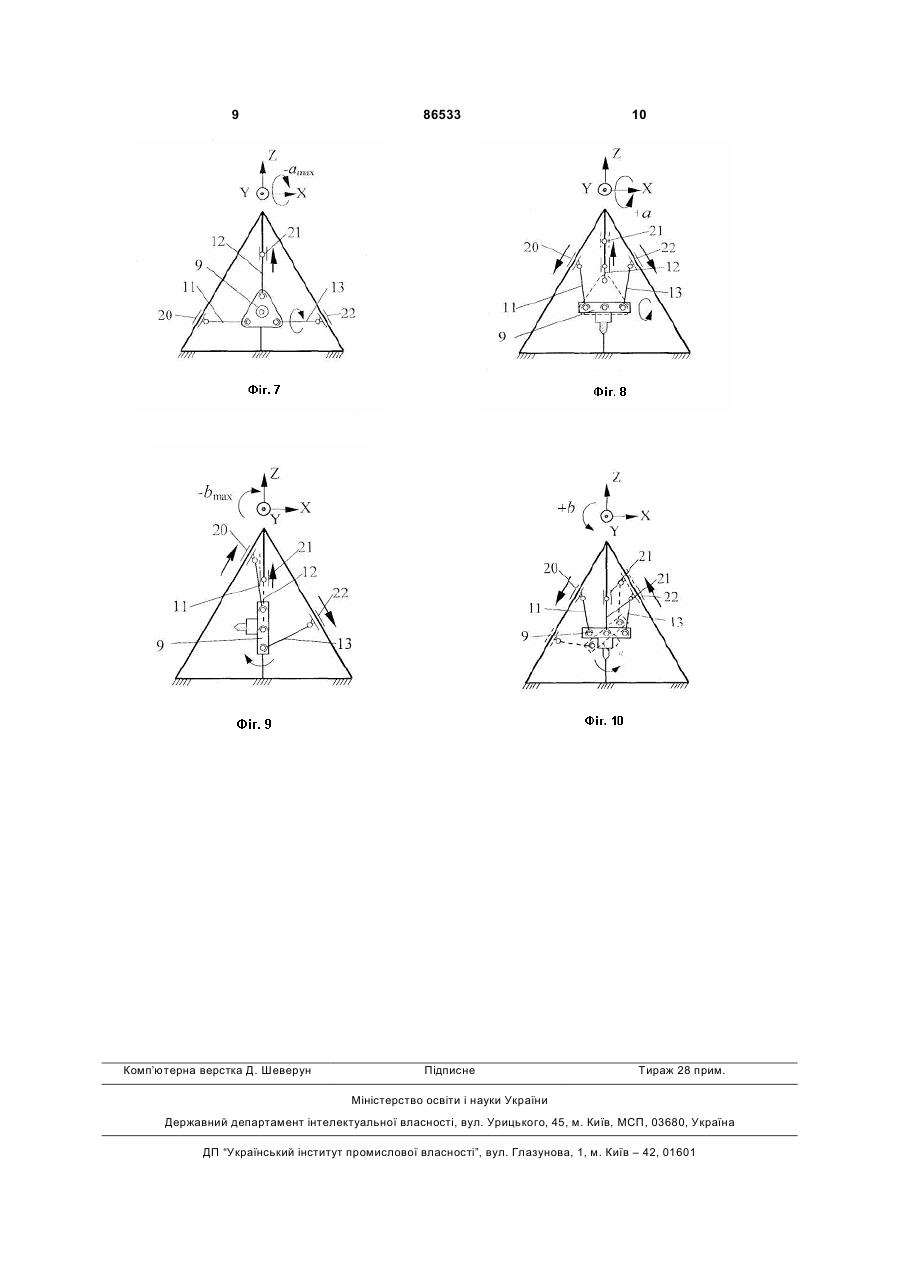
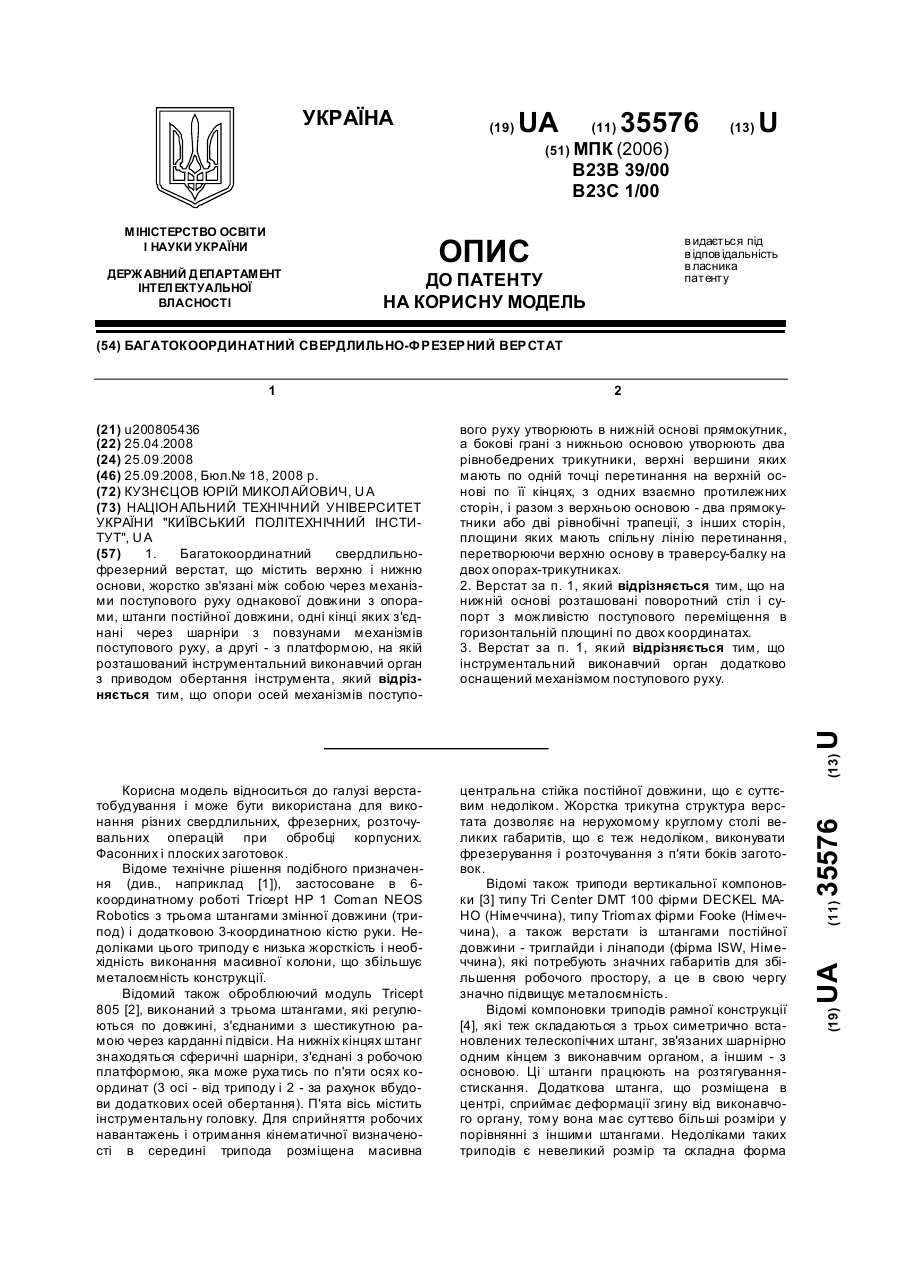
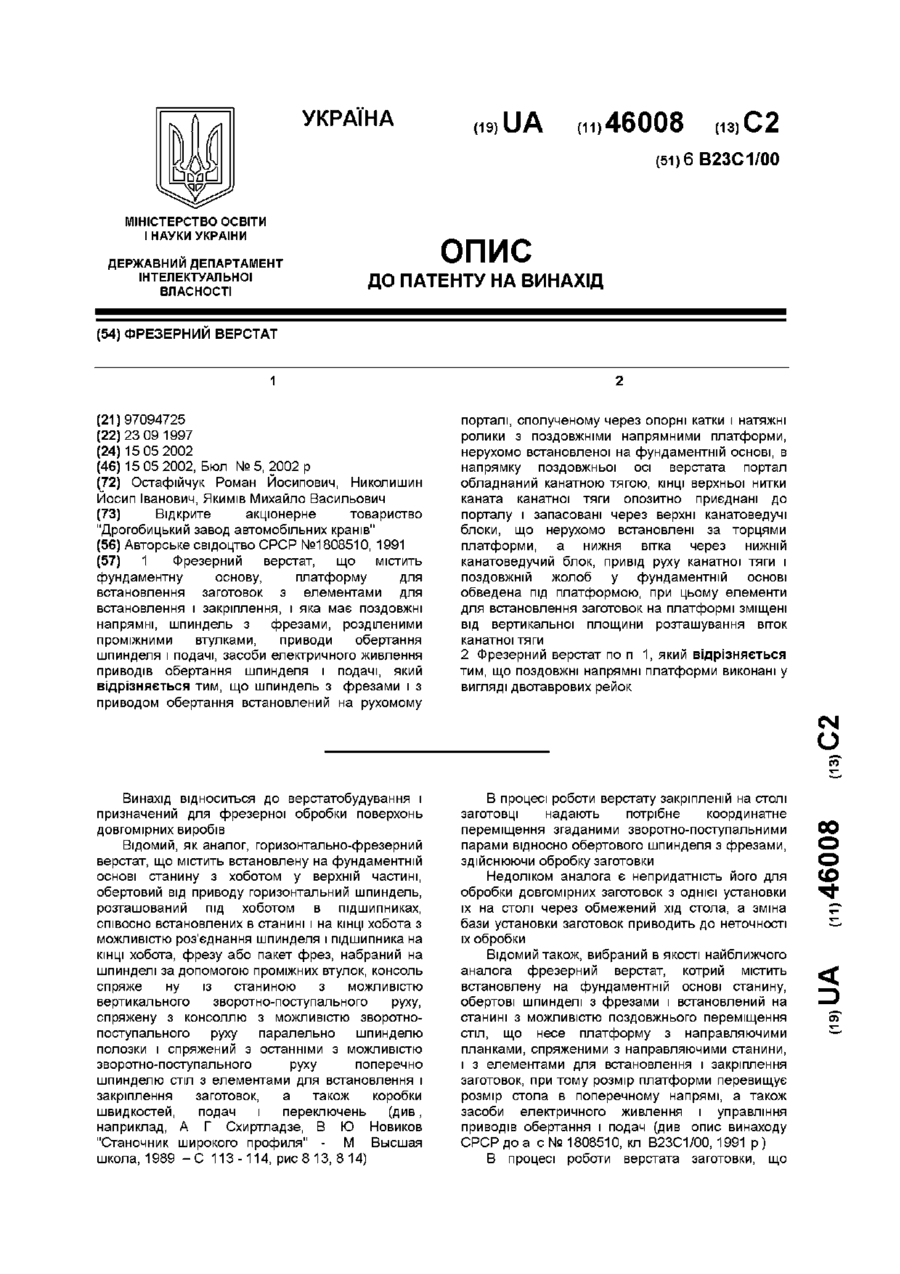
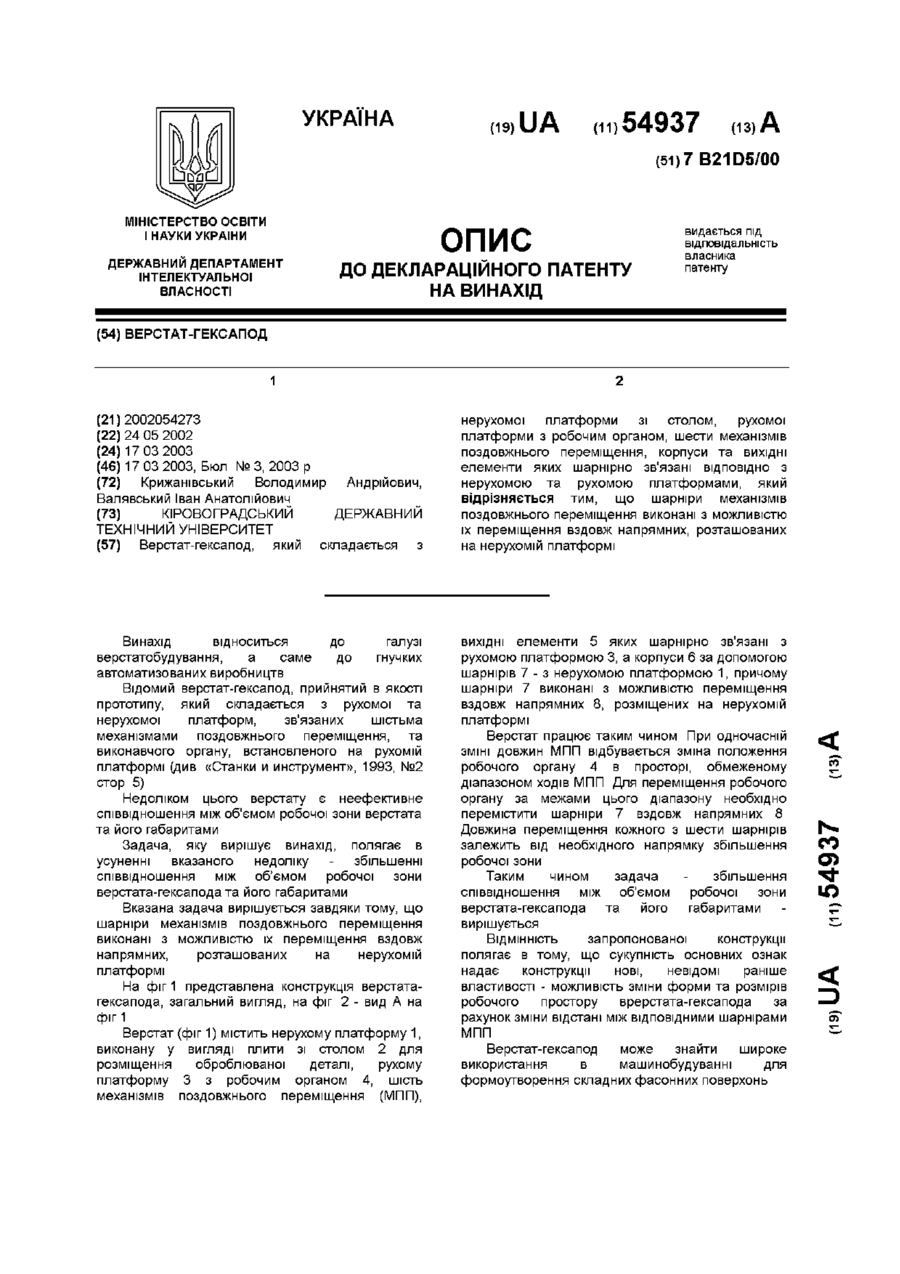
1. Багатокоординатний свердлильнофрезерний верстат, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, три штанги постійної довжини, одні кінці яких C2 2 (19) 1 3 довжини - триглайди і лінаподи (фірма ISW, Німеччина), які потребують значних габаритів для збільшення робочого простору, а це в свою чергу значно підвищує металоємність. Відомі компоновки триподів рамної конструкції [4], які теж складаються з трьох симетрично встановлених телескопічних штанг, зв'язаних шарнірно одним кінцем з виконавчим органом, а іншим - з основою. Ці штанги працюють на розтягуваннястискання. Додаткова штанга, що розміщена в центрі, сприймає деформації згину від виконавчого органу, тому вона мас суттєво більші розміри у порівнянні з іншими штангами. Недоліками таких триподів є невеликий розмір та складна форма робочого простору, а також складна конструкція та висока вартість штанг змінної довжини. Не звільнена від зазначених недоліків і конструкція [5], яка мас плоску основу для трьох штанг змінної довжини і центральну штату з сферичною опорою в місті з'єднання з фрезерною високошвидкісною головкою. В якості найбільш близького аналогу, прийнятому за прототип, обраний багатокоординатний свердлильно-фрезерний верстат [5], що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, три штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, па якій розташований інструментальний виконавчий орган з приводом обертання інструменту. До недоліків прототипу відносяться: по-перше, збільшення габаритів і металоємності верстата, що викликано паралельним виконанням трьох механізмів поступового руху і необхідністю застосування верхньої основи таких же розмірів, як і нижня основа; по-друге, знижена жорсткість пружної системи, що потребує підвищення моментів опору поперечних перерізів механізмів поступового руху і таким чином збільшення металоємності конструкції; по-третє, обмежена кількість координатних рухів, що звужує технологічні можливості верстата. В основу винаходу поставлена задача удосконалення багатокоординатного свердлильнофрезерного верстата шляхом того, що осі механізмів поступового руху мають одну точку перетинання у верхній основі і утворюють правильну трикутну піраміду, що дозволяє досягнути технічний результат - зниження металоємності і підвищення жорсткості конструкції. Крім того, введення поворотного столу і двохкоординатного супорта дозволяє розширити технологічні можливості верстата. Вирішення поставленої задачі досягається тим, що в багатокоординатному свердлильнофрезерному верстаті, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, три штанги постійної довжини, одні кіпці яких з'єднані шарнірами з повзунами механізмів поступового руху, а другі з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструменту, згідно винаходу, 86533 4 новим є те, що осі механізмів поступового руху мають одну точку перетинання, розташовану над платформою з інструментальним виконавчим органом, і утворюють правильну трикутну піраміду. Завдяки однієї опори у вершині піраміди розміри верхньої основи мають невеликі габарити, що знижує металоємність конструкції при підвищенні її жорсткості. Розташування па нижній основі поворотного столу, вертикальна вісь повороту якого проходить через вершину правильної трикутної піраміди, а також виконання супорту з можливістю поступового переміщення в горизонтальній площині по двох координатах, дозволяє за рахунок трьох додаткових рухів суттєво розширити технологічні можливості верстата. Суть винаходу пояснюється кресленнями, де на Фіг.1 зображено кінематичну схему верстата з механізмами подачі під кутами у вигляді кульковогвинтових передач, осі яких перетинаються у вершині трикутної піраміди, і поворотним столом для заготовки; Фіг.2 - систему координат з можливими формоутворюючими і установчими рухами вздовж трьох координат X, Y, Z і трьох обертових а, b, с; Фіг.3 - схема координатних рухів стола по осях X і Y; Фіг.1 з системою ЧПК; Фіг.5 - переміщення свердлильно-фрезерної головки в напрямку Z; Фіг.6 максимальне переміщення Zmax свердлильнофрезерної головки по вертикальній координаті; Фіг.7 максимальне кутове переміщення - аmах свердлильно-фрезерної головки навколо осі X; Фіг.8 кутове переміщення +а свердлильно-фрезерної головки навколо осі X; Фіг.9 - максимальне кутове переміщення - bmax свердлильно-фрезерної головки навколо осі Y; Фіг.10 - кутове переміщення +b свердлильно-фрезерної головки навколо осі Y. Верстат містить нижню основу 1 (Фіг.1), три механізми поступового руху 2, 3, 4, наприклад, кулькові гвинтові передачі з опорами 5, 6, 7 (Фіг.4) відповідно в нижній основі 1 (опора 6 на Фіг.1 не показана) і опорами у верхній основі 8, де перетинаються осі механізмів поступового руху, що утворює правильну трикутну піраміду. Основа 8 розташована над платформою 9 з інструментальним виконавчим органом 10, оснащений приводом обертання інструменту, наприклад, високошвидкісним мотор-шпинделем (електричним або пневматичним). Платформа 9 зв'язана з механізмами поступового руху за допомогою штат-постійної довжини 11, 12, 13, па кінцях яких розташовані шарніри 14, 15, 16 з боку платформи і шарніри 17, 18, 19 з боку поступово рухомих повзунів 20, 21, 22, отримуючих рух від механізмів 2, 3, 4 відповідно. Для підвищення жорсткості конструкції введена траверса 23, жорстко зв'язана з одного боку з поверхнею нижньої основи 1 і, з другого боку, з верхньою основою 8. Кожний механізм поступового руху 2, 3, 4 оснащений самостійним приводом, наприклад, у вигляді електродвигунів 24, 25, 26 відповідно. Для додаткового переміщення заготовки 27 (фіг.1) по координаті "с" (обертання до 120°) (Фіг.2), крім координати X, a, b виконаний поворотний стіл 28 з приводом обертання від електродви 5 гуна 29 через механічну черв'ячну передачу 30, розташовану в нижній основі 1. Можливе розширення технологічних можливостей верстата за рахунок введення супорта 31 (Фіг.3, 4) з двома поступовими переміщеннями X і Y, наприклад, від крокових електродвигунів 32 і 33 (Фіг.4) і кулькових гвинтових передач (на Фіг.4 не показано). Таким чином верстат може мати максимум 6 керованих координатних рухів (Фіг.2): поступові X, Y, Z і кутові а, b, с Керування рухами верстата забезпечується системою числового програмного керування (ЧПК) 34 (Фіг.4), яке подає команди на електродвигуни 24, 25, 26, 29, 32, 33. Верстат працює наступним чином. Управління поступовими і кутовими подачами - рухами різального інструменту виконується системою ЧПК 34 (Фіг.4) від трьох електродвигунів 24, 25, 26, кожний з яких задає рух окремого механізму поступового руху 2, 3, 4, на яких встановлені повзуни 20, 21, 22. Якщо всі три повзуни 20, 21, 22 переміщуються згідно стрілок вниз (Фіг.5) на однакову величину, то платформа 9 опускається вниз (показано штрих-пунктирними лініями) на величину -Z, а штанги 11, 12, 13 при цьому розходяться. Крайнє нижнє положення платформи, що визначає максимальне значення координати -Zmax (Фіг.6) можливе при певному розташуванні штанг 11, 12, 13. Можлива така ситуація, при якій переміщення повзунів 20, 21, 22 вниз приведе до підйому платформи 9. Може бути така ситуація, при якій дві штанги 11 і 13 розведені і нерухомі, а повзун 21 і штанга 12 переміщуються уверх (Фіг.7), що приведе до обертання платформи 9 відносно осі координат х на кут -аmах. Можлива і гака ситуація, коли всі повзуни рухаються, наприклад, повзуни 20 і 22 рухаються вниз (Фіг.8), а повзун 21 уверх, що поверне платформу 9 на кут +а навколо осі х. Якщо повзун 21 і штанга 12 нерухомі, а повзуни 20 і 22 рухаються в різні сторони (повзун 21 86533 6 уверх, а повзун 22 до низу), платформа повертається навколо осі Y на кут -b до крайнього положення -bmax (Фіг.9). При зміні напрямку переміщення повзунів 20 і 22 (Фіг.10) напрямок кутового обертання платформи 9 змінюється на +Ь. Таким чином, змінюючи напрямок переміщення повзунів і положення штанг можна отримати різні лінійні (по координаті Z) і кутові положення (по координатах а і b) платформи з інструментом, а вводячи додаткові рухи заготовки, установленої на поворотному столі (координата с) (Фіг.1) або двох координатному супорті (координати X і Y) (Фіг.3, 4) можна додатково розширити технологічні можливості верстата по формоутворюючим рухам і виконанню різних операцій і різними ріжучими інструментами для багатоцільового верстата з магазином інструментів і автоматичної їх зміни [2, 3]. Джерела інформації 1. Потапов В.А. На острие технического прогресса //Машиностроитель, 1998, №2, с.52-58 (рис. 1, с.52). 2. Агрегатно-модульне технологічне обладнання. Частина 3. Агрегатно-модульнe технологічне обладнання нового покоління, його оснащения та інструментальне забезпечення. Під ред. проф. Кузнецова Ю.М. Кіровоград. 2003. - 508с. (рис. 19.22 і 19.24 на стор.168-170). 3. Технологічне обладнання з паралельною кінематикою. Під ред. проф. Кузнецова Ю.М. Кіровоград. - 200. с (рис. на стор.). 4. Валявський І.А., КрижанівськийВ.А. Тенденції розвитку верстатів паралельної структури //Вісник СумДУ, №2(48), 2003. с.18-22 (рис. 3). 5. Патент Німеччини №19955520, МПК B23Q1/70, В23К26/08, заявл. 18.11.1999, опубл. 31.05.2001. 6. Т.П. Chang, S.L. Chen, Y.C. Lin, I. Inasaki. Post-Processor Development of a Hybrid TRR-XY Parallel Kinematic Machine Tool. Int & Adv Manuf Technol (2002) 20:259-269. Ownership and Copyright. © 2002 Springer Verlag London Limited (fig. 1, fig-5) 7 86533 8 9 Комп’ютерна верстка Д. Шеверун 86533 Підписне 10 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMultiaxes drilling-and-milling machine
Автори англійськоюKuznietsov Yurii Mykolaiovych, Dmytriev Dmytro Oleksiiovych, Dinevych Hryhorii Yukhymovych
Назва патенту російськоюМногокоординатный сверлильно-фрезерный станок
Автори російськоюКузнецов Юрий Николаевич, Дмитриев Дмитрий Алексеевич, Диневич Григорий Ефимович
МПК / Мітки
МПК: B23B 39/00, B23Q 1/00
Мітки: багатокоординатний, свердлильно-фрезерний, верстат
Код посилання
<a href="https://ua.patents.su/5-86533-bagatokoordinatnijj-sverdlilno-frezernijj-verstat.html" target="_blank" rel="follow" title="База патентів України">Багатокоординатний свердлильно-фрезерний верстат</a>
Багатокоординатний свердлильно-фрезерний верстат
Номер патенту: 35576
Опубліковано: 25.09.2008
Автор: Кузнєцов Юрій Миколайович
МПК: B23C 1/00, B23B 39/00
Мітки: свердлильно-фрезерний, верстат, багатокоординатний
Формула / Реферат:
1. Багатокоординатний свердлильно-фрезерний верстат, що містить верхню і нижню основи, жорстко зв'язані між собою через механізми поступового руху однакової довжини з опорами, штанги постійної довжини, одні кінці яких з'єднані через шарніри з повзунами механізмів поступового руху, а другі - з платформою, на якій розташований інструментальний виконавчий орган з приводом обертання інструмента, який відрізняється тим, що опори осей механізмів...
Фрезерний верстат
Номер патенту: 46008
Опубліковано: 15.05.2002
Автори: Остафійчук Роман Йосипович, Якимів Михайло Васильович, Николишин Йосип Іванович
МПК: B23C 1/00
Формула / Реферат:
1. Фрезерний верстат, що містить фундаментну основу, платформу для встановлення заготовок з елементами для встановлення і закріплення, і яка має поздовжні напрямні, шпиндель з фрезами, розділеними проміжними втулками, приводи обертання шпинделя і подачі, засоби електричного живлення приводів обертання шпинделя і подачі, який відрізняється тим, що шпиндель з фрезами і з приводом обертання встановлений на рухомому порталі, сполученому через...
Фрезерний верстат для обробки великогабаритних деталей з двох боків

Номер патенту: 36149
Опубліковано: 10.10.2008
Автор: Діордійчук Владислав Віталійович
МПК: B23C 3/00
Мітки: верстат, боків, деталей, обробки, фрезерний, великогабаритних, двох
Формула / Реферат:
1. Фрезерний верстат для обробки великогабаритних деталей з двох боків, що містить станину, на якій розміщений стіл для обробки деталей, установлені з можливістю переміщення відносно станини фрезерні головки, які виконані з роздільними приводами, який відрізняється тим, що фрезерні головки установлені своїми корпусами на опорні поверхні основ, які виконані з визначеним кутом похилу a, причому основи закріплені на верхній напрямній фрезерного...
Верстат-гексапод
Номер патенту: 54937
Опубліковано: 17.03.2003
Автори: Крижанівський Володимир Андрійович, Валявський Іван Анатолійович
МПК: B21D 5/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, який складається з нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами, який відрізняється тим, що шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі.
Буровий верстат
Номер патенту: 17109
Опубліковано: 15.09.2006
Автори: Токарев Олексій Захарович, Лавренко Юрій Васильович, Хорунжий Володимир Дмитрович, Шевченко Микола Іванович
Формула / Реферат:
1. Буровий верстат, що містить ходове устаткування, щоглу з механізмом напору та приводом для обертання штанги, змонтовану на платформі з консолями, що несуть домкрати вирівнювання машини, який відрізняється тим, що на кінці кожної консолі встановлено анкер з силовим циліндром, призначений для кріплення верстата на робочій позиції.2. Буровий верстат за п. 1, який відрізняється тим, кінцева частина кожної консолі, що несе анкер з...
Попередній патент: Групова сирна форма
Наступний патент: Сільськогосподарський агрегат
Випадковий патент: Кормова добавка для птиці