Пристрій регулювання, синхронізації та стабілізації швидкості обертання мотор-коліс електротранспортного засобу
Номер патенту: 67991
Опубліковано: 12.03.2012
Автори: Павлов Віктор Борисович, Третяк Михайло Вікторович, Попов Олексій Васильович
Формула / Реферат
Пристрій регулювання, синхронізації та стабілізації швидкості обертання мотор-коліс електротранспортного засобу, який має два блоки акумуляторних батарей, що живлять через транзисторні перетворювачі з загальним вузлом задання швидкості два тягових електродвигуни, кожен з яких з'єднано з ведучим колесом, блок порівняння, блок корекції та два датчики швидкості, які встановлені на валах тягових електродвигунів і з'єднані з блоком порівняння, який своїм виходом підключений до першого входу блока корекції, вихід якого з'єднаний з транзисторним перетворювачем одного з тягових електродвигунів, причому вхід вузла задання швидкості підключений до педалі акселератора, а вихід підключений до входу транзисторного перетворювача першого електродвигуна та до другого входу блока корекції, який відрізняється тим, що в нього додатково введено блок стабілізації, підключений до одного з датчиків швидкості та до перемикача режимів.
Текст
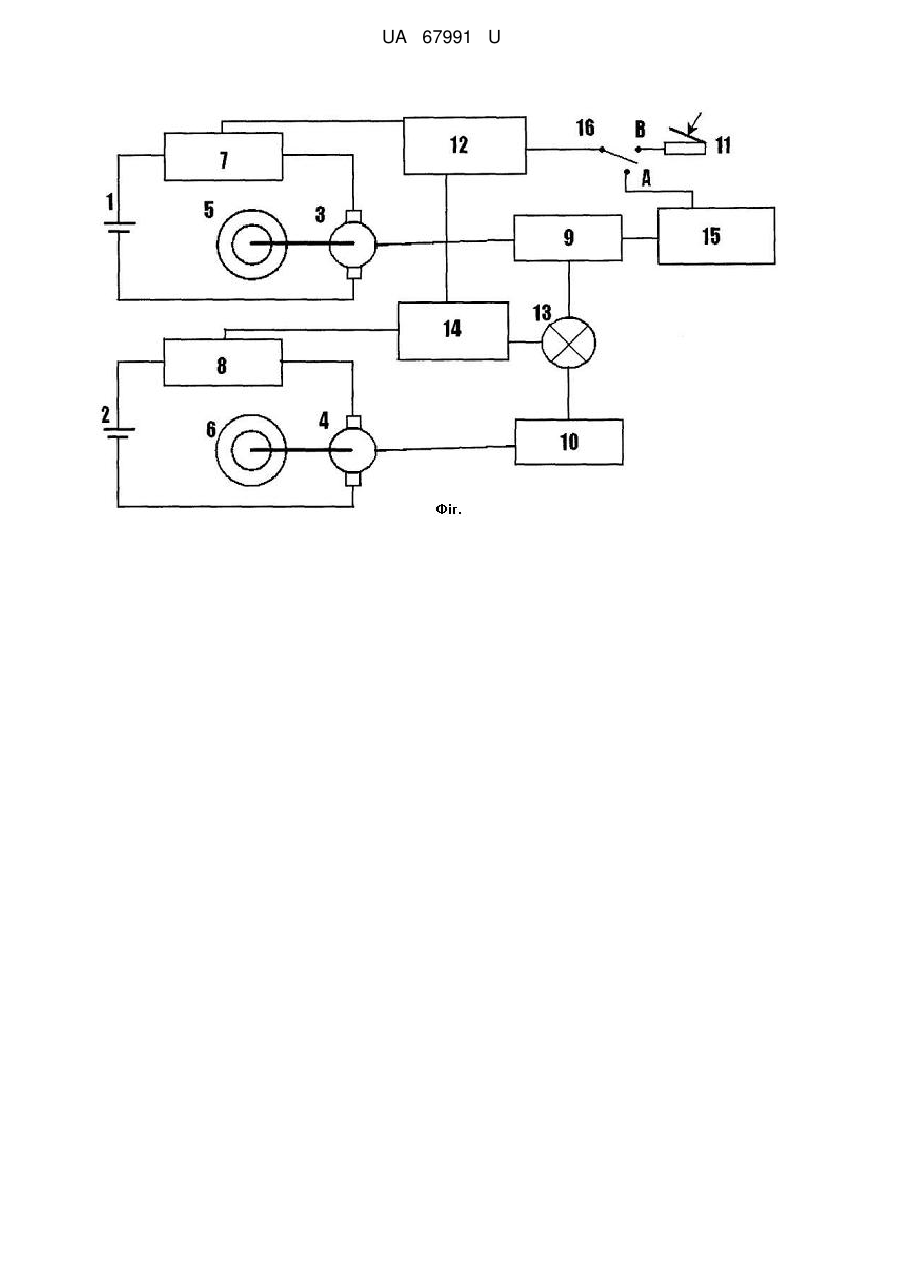
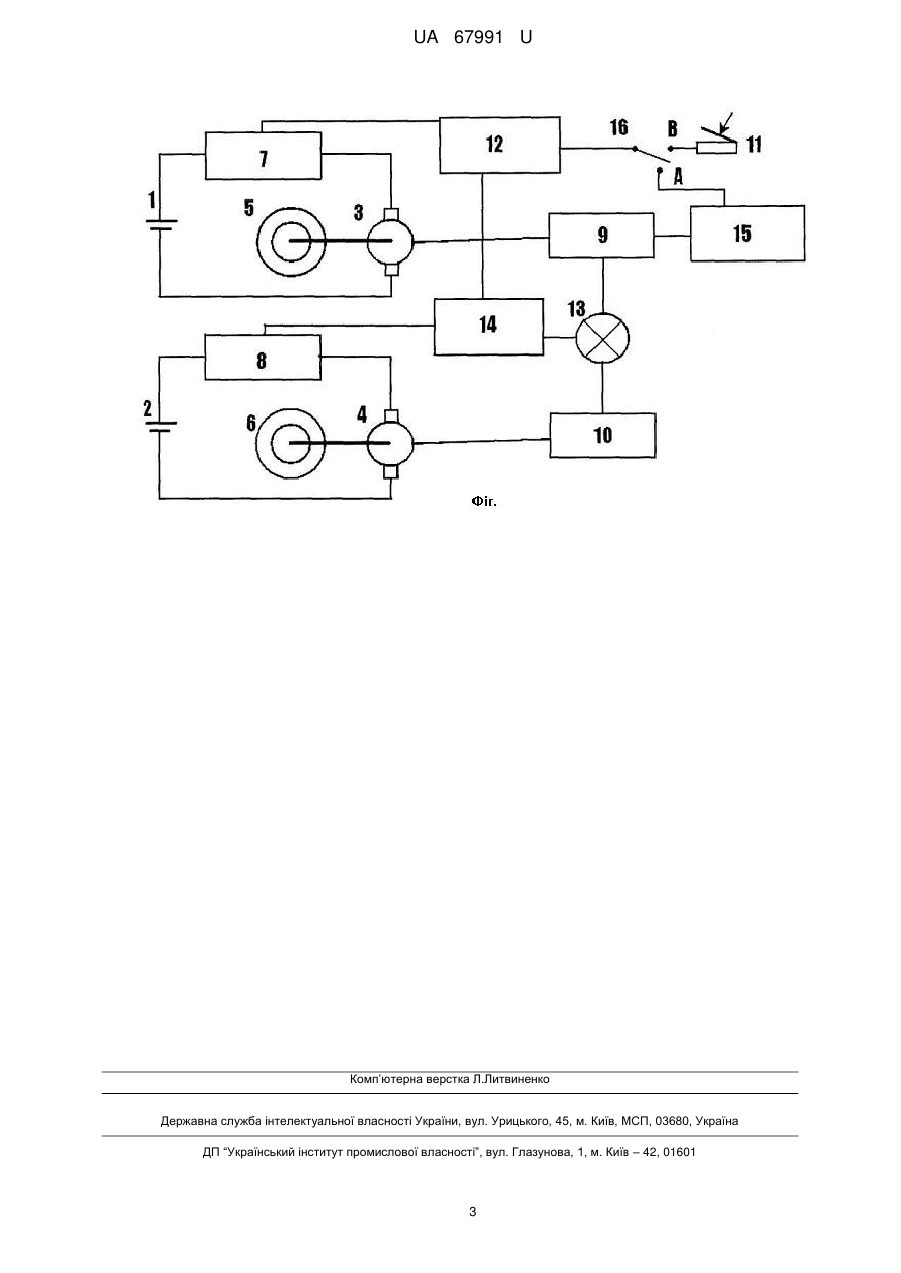
Реферат: UA 67991 U UA 67991 U 5 10 15 20 25 30 35 40 45 50 55 60 Пристрій належить до галузі електрообладнання і може використовуватися в електротранспорті з живленням від автономного джерела(дизель-генератора, акумуляторної батареї і т. п.) - електротягачі, кар'єрні самоскиди, електроскутери, електромобілі, електроцикли і т. п. Відома система приводу кар'єрних самоскидів з дизель-генераторною установкою та моторколесами [1]. Швидкість обертання тягових електродвигунів у них змінюється за допомогою резисторно-контакторного управління та шляхом зміни напруги генератора. Визначення швидкості обертання електродвигуна за допомогою датчиків швидкості проводиться лише для визначення моментів перемикання контакторів з метою переходу на наступний ступінь напруги, що подається на тяговий електродвигун. Однак, таке перемикання, що здійснюється для кожного тягового електродвигуна окремо і залежить від його швидкості обертання, не синхронізується із швидкостями обертання інших двигунів, що вносить неузгодженість у швидкості обертання коліс машини та призводить до нестійкого керування, зниження надійності та підвищеного зносу шин ведучих коліс. Найбільш близьким до того, що заявляється є пристрій регулювання та синхронізації швидкості обертання мотор-коліс електротранспортного засобу [2], який складається з двох блоків акумуляторних батарей, двох електродвигунів, двох ведучих коліс з датчиками швидкості, двох транзисторних перетворювачів, блоків порівняння та корекції. Швидкість обертання задається за допомогою блока задання. Сигнали з датчиків швидкості на кожному колесі після порівняння надходять на блок корекції, в результаті чого синхронізується швидкість обох коліс. Однак, зважаючи на те, що швидкість обертання коліс задається педаллю акселератора, натискання якої виконує водій, на практиці це призводить до нерівномірності руху транспортного засобу, що в ряді випадків не дозволяє виконувати технологічні операції, які потребують стабільної швидкості. Задачею корисної моделі є створення пристрою регулювання, синхронізації та стабілізації швидкості обертання мотор-коліс електротранспортного засобу, в якому сигнал, що відповідає швидкості обертання одного з електродвигунів подається на блок стабілізації, в якому він порівнюється з еталонним заданням. Стабілізований сигнал надходить на вузол задання, потім на транзисторний перетворювач одного з електродвигунів, а через вузол корекції стабілізований сигнал надходить на транзисторний перетворювач другого електродвигуна, таким чином можлива не тільки синхронізація швидкості обертання мотор-коліс транспортного засобу, а також стабілізація тієї швидкості на заданому рівні, що забезпечує новий технічний результат - розширення функціональних можливостей пристрою. Поставлена задача вирішується завдяки тому, що у пристрій регулювання, синхронізації та стабілізації швидкості обертання мотор-коліс електротранспортного засобу, який має два блоки акумуляторних батарей, що живлять через транзисторні перетворювачі з загальним вузлом задання швидкості два тягових електродвигуни, кожен з яких з'єднано з ведучим колесом, блок порівняння, блок корекції та два датчики швидкості, які встановлені на валах тягових електродвигунів і з'єднані з блоком порівняння, який своїм виходом підключений до першого входу блока корекції, вихід якого з'єднаний з транзисторним перетворювачем одного з тягових електродвигунів, причому вхід вузла задання швидкості підключений до педалі акселератора, а вихід підключений до входу транзисторного перетворювача першого електродвигуна та до другого входу блока корекції, додатково введено блок стабілізації, підключений до одного з датчиків швидкості та до перемикача режимів. Порівняльний аналіз відомих технічних рішень показує, що запропонований пристрій має можливість стабілізувати швидкість обох мотор-коліс транспортного засобу через те, що сигнал стабілізації, встановлений на заданому рівні, постійно підтримується та синхронізується, що дозволяє не тільки підтримувати швидкість обох коліс однаковими, а також підтримувати швидкість транспортного засобу на заданому рівні, що в свою чергу, покращує керування засобом та стабільність руху та приводить до нового технічного результату - розширення функціональних можливостей електротранспортного засобу. На основі наведеного вище можна зробити висновок про те, що сукупність суттєвих ознак, що викладена у формулі винаходу є необхідною та достатньою для досягнення нового технічного результату - стабілізації швидкості обох мотор-коліс, що розширює функціональні можливості транспортного засобу. На кресленні (Фіг.) зображена структурна схема пристрою регулювання, синхронізації та стабілізації швидкості обертання мотор-коліс електротранспортного засобу. Пристрій складається з двох блоків акумуляторних батарей 1, 2, двох тягових електродвигунів 3, 4, двох ведучих коліс 5, 6, двох транзисторних перетворювачів 7, 8, двох датчиків швидкості 9, 10, 1 UA 67991 U 5 10 15 20 25 30 педалі акселератора 11, вузла задання 12, блока порівняння 13, блока корекції 14, блока стабілізації 15, перемикача 16, який має два положення А і В. Пристрій працює наступним чином. Перемикач 16 встановлюється у положення А, з'єднуючи блок стабілізації 15 з вузлом задання 12, акселератор 11 від'єднується від системи. В блоці стабілізації 15 встановлюється задана швидкість руху. Сигнал з блока стабілізації 15 надходить в вузол задання 12. На виході вузла задання 12 формується сигнал, що подається одночасно на вхід транзисторного перетворювача 7 (безпосередньо) і вхід транзисторного перетворювача 8 через блок корекції 14. При цьому здійснюється широтно-імпульсне регулювання напруги, що подається на двигуни 3 і 4 відповідно. Після початку обертання валів двигунів на датчиках швидкості 9, 10 з'являються сигнали, що відповідають швидкостям кожного тягового електродвигуна разом з ведучими колесами 5, 6. При цьому сигнал, що відповідає швидкості електродвигуна 3, порівнюється з еталонним сигналом блока стабілізації, а сигнал, що відповідає швидкості електродвигуна 4, порівнюється з сигналом що відповідає швидкості електродвигуна 3 у блоці порівняння 13, з якого сигнал розбіжності швидкостей потрапляє на блок корекції 14. Скорегований сигнал надходить на транзисторний перетворювач 8 і швидкість тягових електродвигунів 3, 4 стають рівними. Цей процес проходить безперервно. Таким чином ведучі колеса 5, 6 обертаються синхронно, незалежно від внутрішніх і зовнішніх збурень, та встановлюється та підтримується задана швидкість руху транспортного засобу. Коли перемикач 16 переводиться у положення В, то пристрій працює так, як і прототип, тобто відбувається синхронізація обертів мотор-коліс, та задання швидкості акселератором 11. Необхідно також зазначити, що запропонований пристрій аналогічно може бути застосований для стабілізації швидкості обертання більшої кількості мотор-коліс, ніж два. При цьому за еталонну приймається швидкість одного мотор-колеса і по ній синхронізують інші. Робота такої багатоколісної системи буде аналогічна роботі двоколісної системи, що була описана вище. Таким чином, у порівнянні з прототипом, запропонований пристрій завдяки постійно діючій стабілізації разом з синхронізацією швидкості обертання мотор-коліс дозволяє отримати новий технічний результат - розширити функціональні можливості транспортного засобу. Література: 1. Ефремов И.С., Пролыгин А.П., Андреев Ю.М., Миндлин А.Б. Теория и расчет тягового привода электромобилей. М.: Высшая школа, 1984. - 384 с. 2. Пат. № 75459, Україна, МПК Н02Р 7/00 G05B 5/00. Пристрій регулювання та синхронізації швидкості обертання моторколіс електротранспортного засобу. А.К. Шидловський, Є.І. Сокіл, В.Б. Павлов, О.М. Юрченко, В.Є. Павленко // Промислова власність. - № 4. - 2006 р. 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Пристрій регулювання, синхронізації та стабілізації швидкості обертання мотор-коліс електротранспортного засобу, який має два блоки акумуляторних батарей, що живлять через транзисторні перетворювачі з загальним вузлом задання швидкості два тягових електродвигуни, кожен з яких з'єднано з ведучим колесом, блок порівняння, блок корекції та два датчики швидкості, які встановлені на валах тягових електродвигунів і з'єднані з блоком порівняння, який своїм виходом підключений до першого входу блока корекції, вихід якого з'єднаний з транзисторним перетворювачем одного з тягових електродвигунів, причому вхід вузла задання швидкості підключений до педалі акселератора, а вихід підключений до входу транзисторного перетворювача першого електродвигуна та до другого входу блока корекції, який відрізняється тим, що в нього додатково введено блок стабілізації, підключений до одного з датчиків швидкості та до перемикача режимів. 2 UA 67991 U Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюApparatus for regulation, synchronization and stabilization of rotational speed of electric vehicle motor-wheels
Автори англійськоюPavlov Viktor Borysovych, Tretiak Mykhailo Viktorovych, Popov Oleksii Vasyliovych
Назва патенту російськоюУстройство регулирования, стабилизации скорости вращения мотор-колес электротранспортного средства
Автори російськоюПавлов Виктор Борисович, Третяк Михаил Викторович, Попов Алексей Васильевич
МПК / Мітки
МПК: H02P 7/00
Мітки: обертання, стабілізації, синхронізації, регулювання, швидкості, електротранспортного, мотор-коліс, засобу, пристрій
Код посилання
<a href="https://ua.patents.su/5-67991-pristrijj-regulyuvannya-sinkhronizaci-ta-stabilizaci-shvidkosti-obertannya-motor-kolis-elektrotransportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Пристрій регулювання, синхронізації та стабілізації швидкості обертання мотор-коліс електротранспортного засобу</a>
Пристрій регулювання та синхронізації швидкості обертання мотор-коліс електротранспортного засобу

Номер патенту: 75459
Опубліковано: 17.04.2006
Автори: Павленко Володимир Євдокимович, Павлов Віктор Борисович, Сокіл Євген Іванович, Шидловський Анатолій Корнійович, Юрченко Олег Миколайович
Мітки: обертання, електротранспортного, засобу, швидкості, мотор-коліс, пристрій, синхронізації, регулювання
Формула / Реферат:
Пристрій регулювання та синхронізації швидкості обертання мотор-коліс електротранспортного засобу, який має два блоки акумуляторних батарей, що живлять через транзисторні перетворювачі з загальним вузлом задання швидкості два тягових електродвигуни, кожен з яких з'єднано з ведучим колесом, який відрізняється тим, що додатково введено блок порівняння, блок корекції та два датчики швидкості, які встановлені на валах тягових електродвигунів і...
Пристрій для регулювання швидкості обертання однофазного конденсаторного електродвигуна
Номер патенту: 46848
Опубліковано: 17.06.2002
Автори: Мішин Володимир Іванович, Соловей Іван Михайлович
МПК: H02P 1/16, H02K 17/08
Мітки: конденсаторного, пристрій, однофазного, електродвигуна, обертання, швидкості, регулювання
Формула / Реферат:
Пристрій для регулювання швидкості обертання однофазного конденсаторного електродвигуна, який включає асинхронний однофазний конденсаторний електродвигун, силову схему на чотирьох симісторах, батарею конденсаторів і блок керування, який відрізняється тим, що симістори з‘єднані зустрічно, при цьому аноди двох симісторів з‘єднані між собою в один вивід, який подається на фазу мережі, аноди двох інших на "0", а до середніх точок...
Спосіб збільшення швидкості обертання та стабілізації обертання ротора двигуна та пристрій для його здійснення
Номер патенту: 24268
Опубліковано: 07.07.1998
Автори: Ткач Анатолій Анатолійович, Надєін Владислав Семенович
Мітки: стабілізації, здійснення, спосіб, ротора, швидкості, двигуна, пристрій, збільшення, обертання
Формула / Реферат:
1. Способ увеличения скорости вращения и стабилизации вращения ротора двигателя, при котором текущую среду направляют на прижатые к упорам в просвете рамочного маха вращающиеся части составной лопасти, внешнюю и внутреннюю, циклическим воздействием этих частей на упоры рамочного маха с одновременным переводом вращающихся частей других составных лопастей во флюгерное положение, вращают ротор, отличающийся тем, что увеличение мощности и КПД...
Спосіб зменшення при пробуксовуванні величини відносного обертання коліс ведучого мосту транспортного засобу
Номер патенту: 91622
Опубліковано: 10.08.2010
Автори: Нечуйвітер Володимир Леонідович, Нечуйвітер Леонід Іванович, Копейченко Юрій Володимирович
МПК: B60K 17/00
Мітки: транспортного, ведучого, величини, спосіб, пробуксовуванні, зменшення, обертання, відносного, мосту, коліс, засобу
Формула / Реферат:
Спосіб зменшення при пробуксовуванні величини відносного обертання коліс ведучого мосту транспортного засобу при його русі по слабонесучій поверхні ґрунту, при якому колеса ведучого мосту транспортного засобу здійснюють обертовий рух в одному напрямку, що відповідає напрямку руху транспортного засобу, який відрізняється тим, що при пробуксовуванні одного із коліс ведучого мосту транспортного засобу півосі протилежного колеса із меншою...
Система автоматичного регулювання швидкості обертання електричних двигунів групи витяжних вентиляторів
Номер патенту: 72947
Опубліковано: 16.05.2005
Автори: Лавінський Дмитро Сергійович, Мартиненко Іван Іванович, Лавріненко Юрій Миколайович, Олійник Павло Вікторович
МПК: F24F 11/08
Мітки: автоматичного, обертання, електричних, групи, система, двигунів, регулювання, витяжних, швидкості, вентиляторів
Формула / Реферат:
Система автоматичного регулювання швидкості обертання електродвигунів групи витяжних вентиляторів, що містить датчик температури і перетворюючий пристрій, яка відрізняється тим, що як перетворюючий пристрій використаний керований пропорційно-інтегральним регулятором широтно-імпульсний перетворювач частоти струму, один вхід якого приєднаний до мережі живлення, другий вхід – до виходу регулятора, вихід – до двигунів приводу вентиляторів, а до...
Попередній патент: Спосіб оцінки селекційного матеріалу дині на жаростійкість за схожістю насіння
Наступний патент: Спосіб нормалізації перебігу родів та стимуляції статевої циклічності у корів після отелення
Випадковий патент: Цифровий вимірювач clr-параметрів