Спосіб компенсації падіння тягового зусилля привода катапульти


Формула / Реферат
Спосіб компенсації падіння тягового зусилля привода катапульти при запуску безпілотного літального апарата, згідно з яким збільшують передавальне число поліспастного механізму у відповідності з заданою закономірністю шляхом зміни положення рухомих шківів, який відрізняється тим, що тягове зусилля (F) привода розширювальної машини перетворюють в зусилля (Р), що передається безпілотному літальному апарату, згідно з закономірністю
Р=Fsecα,
де α - геометрична характеристика поліспастного механізму.
Текст
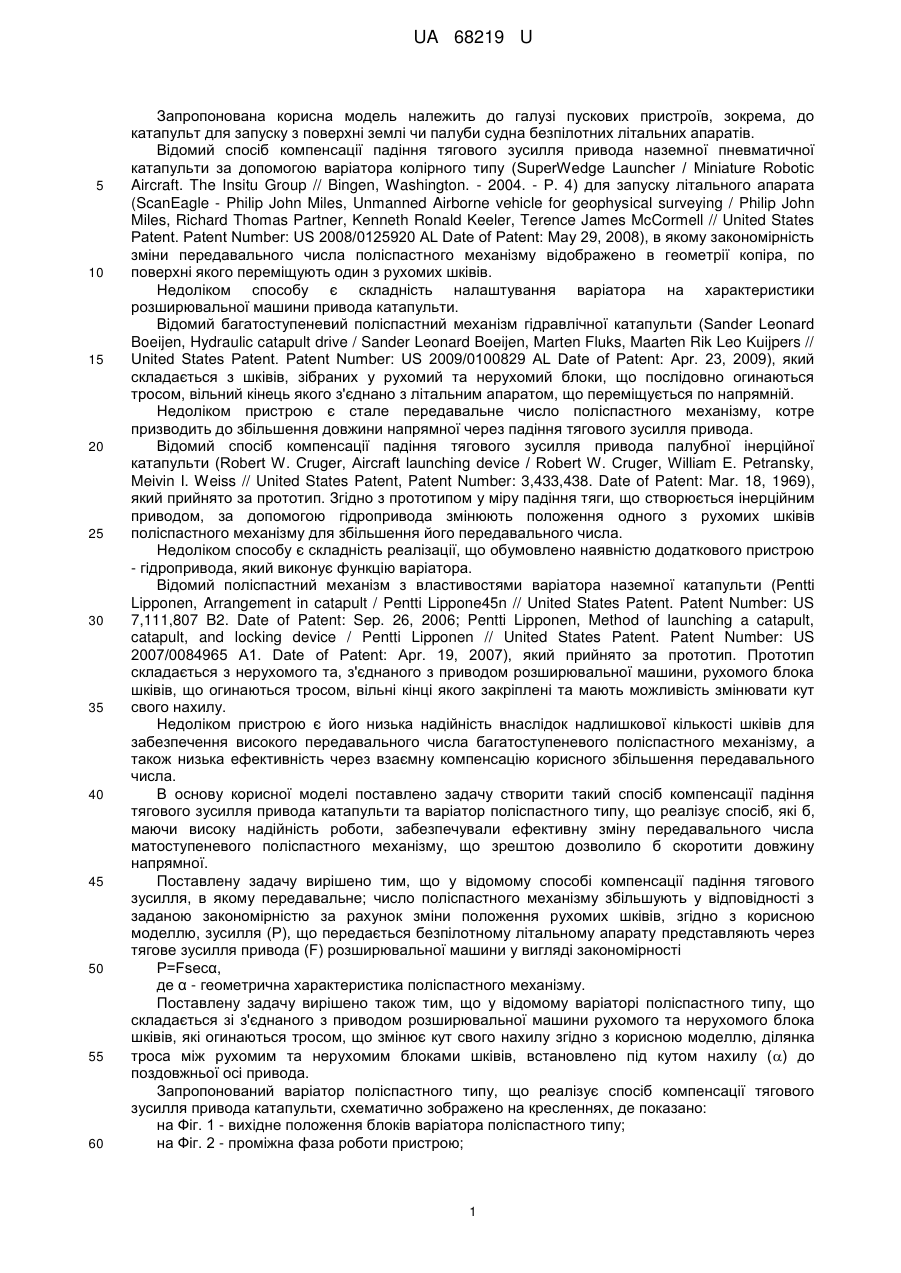
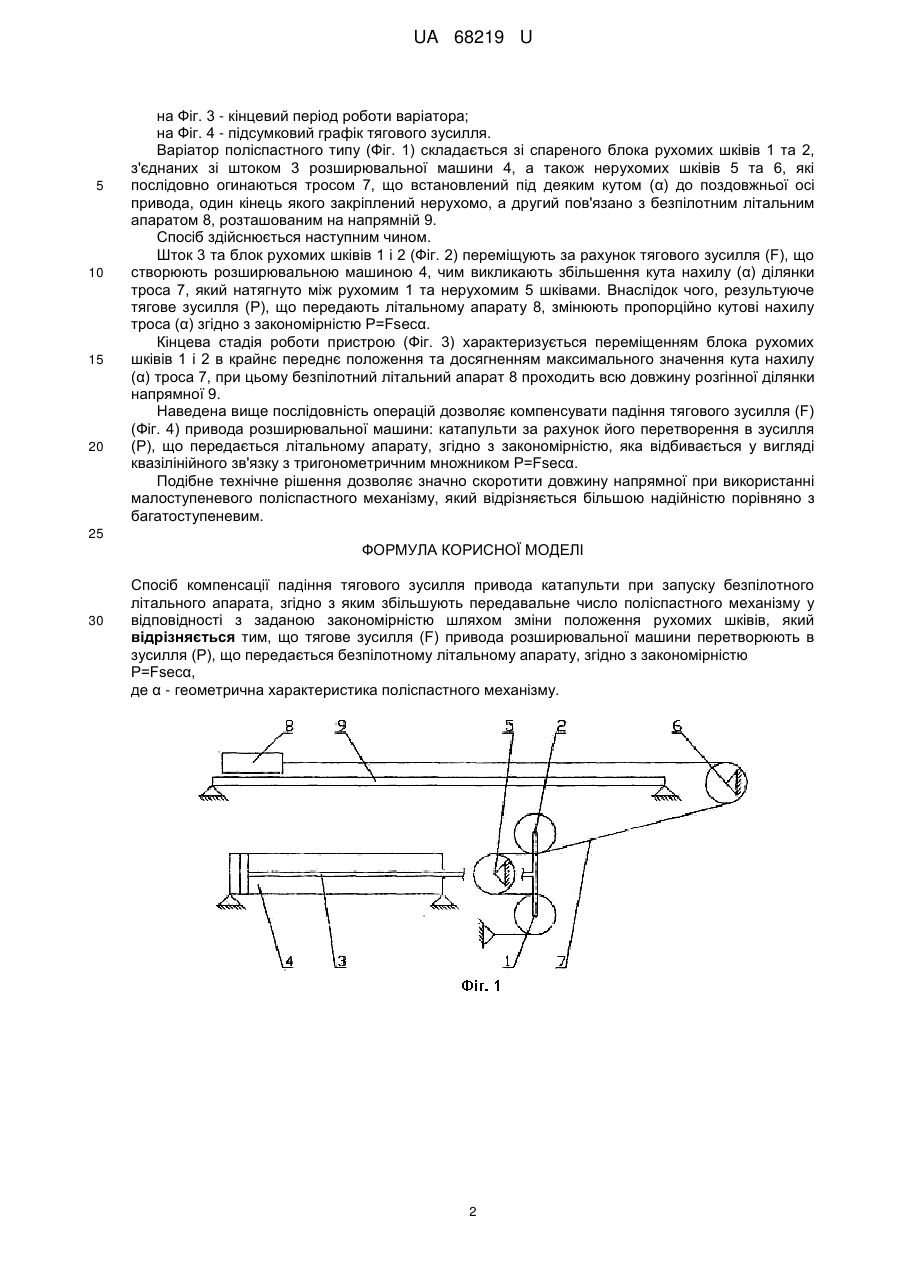
Реферат: Спосіб компенсації падіння тягового зусилля привода катапульти при запуску безпілотного літального апарата, згідно з яким збільшують передавальне число поліспастного механізму у відповідності з заданою закономірністю шляхом зміни положення рухомих шківів. Тягове зусилля (F) привода розширювальної машини перетворюють в зусилля (Р), що передається безпілотному літальному апарату, згідно з закономірністю Р=Fsecα, де α - геометрична характеристика поліспастного механізму. UA 68219 U (54) СПОСІБ КОМПЕНСАЦІЇ ПАДІННЯ ТЯГОВОГО ЗУСИЛЛЯ ПРИВОДА КАТАПУЛЬТИ UA 68219 U UA 68219 U 5 10 15 20 25 30 35 40 45 50 55 60 Запропонована корисна модель належить до галузі пускових пристроїв, зокрема, до катапульт для запуску з поверхні землі чи палуби судна безпілотних літальних апаратів. Відомий спосіб компенсації падіння тягового зусилля привода наземної пневматичної катапульти за допомогою варіатора колірного типу (SuperWedge Launcher / Miniature Robotic Aircraft. The Insitu Group // Bingen, Washington. - 2004. - P. 4) для запуску літального апарата (ScanEagle - Philip John Miles, Unmanned Airborne vehicle for geophysical surveying / Philip John Miles, Richard Thomas Partner, Kenneth Ronald Keeler, Terence James McCormell // United States Patent. Patent Number: US 2008/0125920 AL Date of Patent: May 29, 2008), в якому закономірність зміни передавального числа поліспастного механізму відображено в геометрії копіра, по поверхні якого переміщують один з рухомих шківів. Недоліком способу є складність налаштування варіатора на характеристики розширювальної машини привода катапульти. Відомий багатоступеневий поліспастний механізм гідравлічної катапульти (Sander Leonard Boeijen, Hydraulic catapult drive / Sander Leonard Boeijen, Marten Fluks, Maarten Rik Leo Kuijpers // United States Patent. Patent Number: US 2009/0100829 AL Date of Patent: Apr. 23, 2009), який складається з шківів, зібраних у рухомий та нерухомий блоки, що послідовно огинаються тросом, вільний кінець якого з'єднано з літальним апаратом, що переміщується по напрямній. Недоліком пристрою є стале передавальне число поліспастного механізму, котре призводить до збільшення довжини напрямної через падіння тягового зусилля привода. Відомий спосіб компенсації падіння тягового зусилля привода палубної інерційної катапульти (Robert W. Cruger, Aircraft launching device / Robert W. Cruger, William E. Petransky, Meivin I. Weiss // United States Patent, Patent Number: 3,433,438. Date of Patent: Mar. 18, 1969), який прийнято за прототип. Згідно з прототипом у міру падіння тяги, що створюється інерційним приводом, за допомогою гідропривода змінюють положення одного з рухомих шківів поліспастного механізму для збільшення його передавального числа. Недоліком способу є складність реалізації, що обумовлено наявністю додаткового пристрою - гідропривода, який виконує функцію варіатора. Відомий поліспастний механізм з властивостями варіатора наземної катапульти (Pentti Lipponen, Arrangement in catapult / Pentti Lippone45n // United States Patent. Patent Number: US 7,111,807 B2. Date of Patent: Sep. 26, 2006; Pentti Lipponen, Method of launching a catapult, catapult, and locking device / Pentti Lipponen // United States Patent. Patent Number: US 2007/0084965 A1. Date of Patent: Apr. 19, 2007), який прийнято за прототип. Прототип складається з нерухомого та, з'єднаного з приводом розширювальної машини, рухомого блока шківів, що огинаються тросом, вільні кінці якого закріплені та мають можливість змінювати кут свого нахилу. Недоліком пристрою є його низька надійність внаслідок надлишкової кількості шківів для забезпечення високого передавального числа багатоступеневого поліспастного механізму, а також низька ефективність через взаємну компенсацію корисного збільшення передавального числа. В основу корисної моделі поставлено задачу створити такий спосіб компенсації падіння тягового зусилля привода катапульти та варіатор поліспастного типу, що реалізує спосіб, які б, маючи високу надійність роботи, забезпечували ефективну зміну передавального числа матоступеневого поліспастного механізму, що зрештою дозволило б скоротити довжину напрямної. Поставлену задачу вирішено тим, що у відомому способі компенсації падіння тягового зусилля, в якому передавальне; число поліспастного механізму збільшують у відповідності з заданою закономірністю за рахунок зміни положення рухомих шківів, згідно з корисною моделлю, зусилля (Р), що передається безпілотному літальному апарату представляють через тягове зусилля привода (F) розширювальної машини у вигляді закономірності Р=Fsecα, де α - геометрична характеристика поліспастного механізму. Поставлену задачу вирішено також тим, що у відомому варіаторі поліспастного типу, що складається зі з'єднаного з приводом розширювальної машини рухомого та нерухомого блока шківів, які огинаються тросом, що змінює кут свого нахилу згідно з корисною моделлю, ділянка троса між рухомим та нерухомим блоками шківів, встановлено під кутом нахилу () до поздовжньої осі привода. Запропонований варіатор поліспастного типу, що реалізує спосіб компенсації тягового зусилля привода катапульти, схематично зображено на кресленнях, де показано: на Фіг. 1 - вихідне положення блоків варіатора поліспастного типу; на Фіг. 2 - проміжна фаза роботи пристрою; 1 UA 68219 U 5 10 15 20 на Фіг. 3 - кінцевий період роботи варіатора; на Фіг. 4 - підсумковий графік тягового зусилля. Варіатор поліспастного типу (Фіг. 1) складається зі спареного блока рухомих шківів 1 та 2, з'єднаних зі штоком 3 розширювальної машини 4, а також нерухомих шківів 5 та 6, які послідовно огинаються тросом 7, що встановлений під деяким кутом (α) до поздовжньої осі привода, один кінець якого закріплений нерухомо, а другий пов'язано з безпілотним літальним апаратом 8, розташованим на напрямній 9. Спосіб здійснюється наступним чином. Шток 3 та блок рухомих шківів 1 і 2 (Фіг. 2) переміщують за рахунок тягового зусилля (F), що створюють розширювальною машиною 4, чим викликають збільшення кута нахилу (α) ділянки троса 7, який натягнуто між рухомим 1 та нерухомим 5 шківами. Внаслідок чого, результуюче тягове зусилля (Р), що передають літальному апарату 8, змінюють пропорційно кутові нахилу троса (α) згідно з закономірністю Р=Fsecα. Кінцева стадія роботи пристрою (Фіг. 3) характеризується переміщенням блока рухомих шківів 1 і 2 в крайнє переднє положення та досягненням максимального значення кута нахилу (α) троса 7, при цьому безпілотний літальний апарат 8 проходить всю довжину розгінної ділянки напрямної 9. Наведена вище послідовність операцій дозволяє компенсувати падіння тягового зусилля (F) (Фіг. 4) привода розширювальної машини: катапульти за рахунок його перетворення в зусилля (Р), що передається літальному апарату, згідно з закономірністю, яка відбивається у вигляді квазілінійного зв'язку з тригонометричним множником Р=Fsecα. Подібне технічне рішення дозволяє значно скоротити довжину напрямної при використанні малоступеневого поліспастного механізму, який відрізняється більшою надійністю порівняно з багатоступеневим. 25 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 Спосіб компенсації падіння тягового зусилля привода катапульти при запуску безпілотного літального апарата, згідно з яким збільшують передавальне число поліспастного механізму у відповідності з заданою закономірністю шляхом зміни положення рухомих шківів, який відрізняється тим, що тягове зусилля (F) привода розширювальної машини перетворюють в зусилля (Р), що передається безпілотному літальному апарату, згідно з закономірністю Р=Fsecα, де α - геометрична характеристика поліспастного механізму. 2 UA 68219 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for compensating reduction of traction effort of catapult drive
Автори англійськоюSereda Vladyslav Oleksandrovych
Назва патенту російськоюСпособ компенсации падения тягового усилия привода катапульты
Автори російськоюСереда Владислав Александрович
МПК / Мітки
МПК: B64F 1/00
Мітки: падіння, спосіб, привода, зусилля, тягового, катапульти, компенсації
Код посилання
<a href="https://ua.patents.su/5-68219-sposib-kompensaci-padinnya-tyagovogo-zusillya-privoda-katapulti.html" target="_blank" rel="follow" title="База патентів України">Спосіб компенсації падіння тягового зусилля привода катапульти</a>
Спосіб регулювання тягового зусилля приводу катапульти

Номер патенту: 65105
Опубліковано: 25.11.2011
Автори: Середа Владислав Олександрович, Амброжевич Олександр Володимирович
МПК: B64F 1/00
Мітки: тягового, регулювання, зусилля, спосіб, катапульти, приводу
Формула / Реферат:
1. Спосіб регулювання тягового зусилля приводу катапульти при запуску безпілотного літального апарата, згідно з яким квазісталий рівень тягового зусилля підтримують шляхом часткового використання енергії розширюваного тіла за рахунок змінення робочої площі, яка передає цю енергію трансмісії, який відрізняється тим, що робочу площу трансмісії підсумовують шляхом послідовного підключення ланок телескопа, що сприймають навантаження.
Пристрій для збільшення тягового зусилля шахтного локомотива по зчепленню
Номер патенту: 50674
Опубліковано: 25.06.2010
Автори: Біліченко Юрій Миколайович, Денищенко Олександр Валерійович
МПК: E21F 13/00
Мітки: зусилля, тягового, зчепленню, збільшення, пристрій, локомотива, шахтного
Формула / Реферат:
Пристрій для збільшення тягового зусилля шахтного локомотива по зчепленню, який включає додаткове сталеве колесо, вкрите еластичним матеріалом, який відрізняється тим, що до нього введено гвинтомоторний механізм з управляючим блоком, вимірювачі швидкості або пройденого шляху, кожний з яких зв'язаний відповідно з останнім, додатковим сталевим колесом та колісними парами локомотива.
Пристрій для рівномірного розподілу тягового зусилля між канатами
Номер патенту: 67505
Опубліковано: 27.02.2012
Автори: Харченко Євген Валентинович, Бондарчук Богдан Валентинович
МПК: B66B 5/12
Мітки: розподілу, канатами, зусилля, тягового, рівномірного, пристрій
Формула / Реферат:
Пристрій для рівномірного розподілу тягового зусилля між канатами, що містить вертикальні тяги, пропущені через отвори несучого каркаса противаги, кожна з тяг верхнім кінцем з'єднана з канатом і обладнана пружиною, опорною шайбою та регулювальною гайкою, який відрізняється тим, що додатково оснащений гідравлічними циліндрами, манометром, краном, насосом і баком з рідиною, гідравлічно сполученими між собою, при цьому кожна вертикальна тяга...
Пристрій для збільшення тягового зусилля шахтного локомотива по зчепленню
Номер патенту: 95345
Опубліковано: 25.07.2011
Автори: Біліченко Юрій Миколайович, Денищенко Олександр Валерійович
МПК: B60C 15/00, E21F 13/00
Мітки: локомотива, тягового, збільшення, зусилля, зчепленню, шахтного, пристрій
Формула / Реферат:
Пристрій для збільшення тягового зусилля шахтного локомотива по зчепленню, який містить додаткове сталеве колесо, вкрите еластичним матеріалом, який відрізняється тим, що до нього введено гвинтомоторний механізм з блоком керування, вимірювачі швидкості або пройденого шляху, кожний з яких зв'язаний відповідно з блоком керування, додатковим сталевим колесом та колісними парами локомотива.
Спосіб використання тягового зусилля коріоліса (варіанти)
Номер патенту: 80211
Опубліковано: 27.08.2007
Автор: Лиховид Юрій Макарович
МПК: B64G 1/28, G01C 19/00
Мітки: коріоліса, зусилля, варіанти, тягового, використання, спосіб
Формула / Реферат:
1. Спосіб використання тягового зусилля Коріоліса з обертанням першого (1) та другого (2) маховиків навколо відповідних локальних осей (2, 5) та з обертанням другого маховика (4) в напрямку, протилежному до напрямку обертання першого маховика (1), з переміщенням маховиків (1, 4) по замкнутій траєкторії (6) навколо спільної осі прецесії, що розташована поза центрами мас (8, 9) маховиків, який відрізняється тим, що кут нахилу ψ локальних...
Попередній патент: Литтєва машина
Наступний патент: Лопатка осьової турбомашини
Випадковий патент: Індукційний апарат з вихоровим магнітним полем