Спосіб використання тягового зусилля коріоліса (варіанти)
Формула / Реферат
1. Спосіб використання тягового зусилля Коріоліса з обертанням першого (1) та другого (2) маховиків навколо відповідних локальних осей (2, 5) та з обертанням другого маховика (4) в напрямку, протилежному до напрямку обертання першого маховика (1), з переміщенням маховиків (1, 4) по замкнутій траєкторії (6) навколо спільної осі прецесії, що розташована поза центрами мас (8, 9) маховиків, який відрізняється тим, що кут нахилу ψ локальних осeй (2, 5) відповідних маховиків (1, 4) відносно спільної осі (7) примусової прецесії підтримують постійним, кутову швидкість ω обертання маховиків (1, 4) навколо локальних осей (2, 5) синхронізують з кутовою швидкістю Ω переміщення маховиків (1, 4) навколо спільної осі (7), а напрям обертання кожного маховика (1, 4) навколо його локальної осі (2, 5) визначають вектором кутової швидкості обертання навколо спільної осі (7), який умовно повертають і суміщають з кожною локальною віссю (2, 5) обертання відповідного маховика (1, 4), причому напрямок обертання маховиків (1, 4) навколо відповідної локальної осі (2, 5) узгоджують з напрямком обертання повернутого вектора кутової швидкості.
2. Спосіб використання тягового зусилля Коріоліса з обертанням маховиків навколо відповідних локальних осей з одночасним переміщенням маховиків по замкнутій траєкторії (6) навколо спільної осі (7) примусової прецесії, що розташована поза центрами мас маховиків, який відрізняється тим, що обертають непарне число маховиків (1, 4, 4’), не менше трьох, навколо відповідних локальних осей (2, 5, 5’), кут нахилу ψ кожної локальної осі (2, 5, 5’) відповідного маховика (1, 4, 4') відносно спільної осі (7) прецесії підтримують постійним, кутову швидкість ω обертання маховиків (1, 4, 4') навколо локальних осей (2, 5, 5’) синхронізують з кутовою швидкістю Ω переміщення маховиків (1, 4, 4') навколо спільної осі (7), локальні осі (2, 5, 5') маховиків (1, 4, 4') розташовують на однаковій кутовій відстані навколо спільної осі (7) примусової прецесії, а напрямок обертання кожного маховика (1, 4, 4') навколо його локальної осі (2, 5, 5') визначають правилом узгодження, за яким вектор кутової швидкості обертання навколо спільної осі (7) умовно повертають і суміщають з кожною локальною віссю (2, 5, 5') обертання відповідного маховика (1, 4, 4'), причому напрямок обертання маховиків (1, 4, 4') навколо відповідної локальної осі (2, 5, 5') узгоджують з напрямком обертання повернутого вектора кутової швидкості.
3. Спосіб за п. 2, який відрізняється тим, що маховики (1, 4, 4') переміщують навколо спільної осі (7) по еліптичній або круговій траєкторії (6).
4. Спосіб за п. 2, який відрізняється тим, що як маховики (4, 4') використовують кільцевий ротор з конусною внутрішньою поверхнею.
Текст
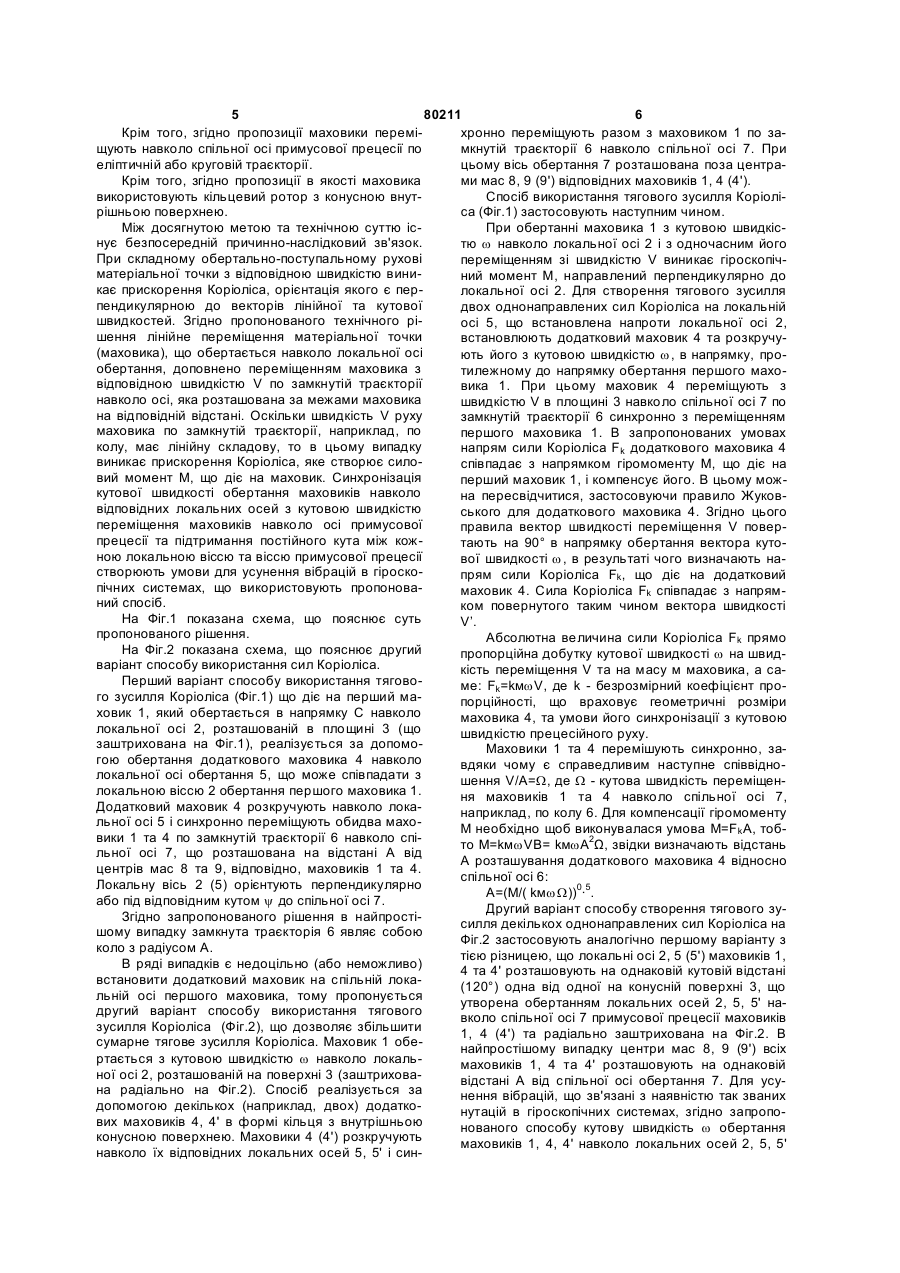
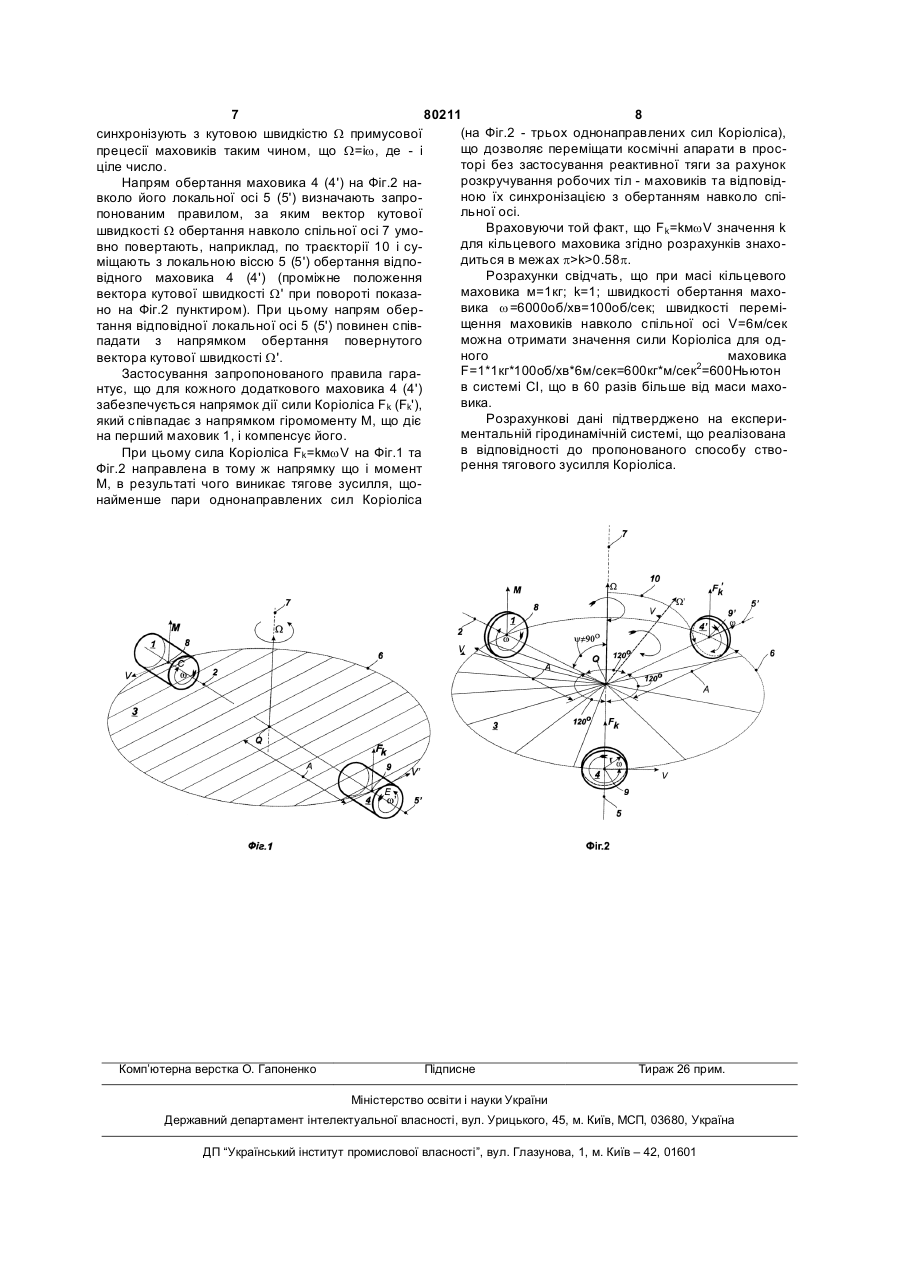
1. Спосіб використання тягового зусилля Коріоліса з обертанням першого (1) та другого (2) маховиків навколо відповідних локальних осей (2, 5) та з обертанням другого маховика (4) в напрямку, протилежному до напрямку обертання першого маховика (1), з переміщенням маховиків (1, 4) по замкнутій траєкторії (6) навколо спільної осі прецесії, що розташована поза центрами мас (8, 9) маховиків, який відрізняється тим, що кут нахилу ψ локальних осeй (2, 5) відповідних маховиків (1, 4) відносно спільної осі (7) примусової прецесії підтримують постійним, кутову швидкість ω обертання маховиків (1, 4) навколо локальних осей (2, 5) синхронізують з кутовою швидкістю Ω переміщення маховиків (1, 4) навколо спільної осі (7), а напрям обертання кожного маховика (1, 4) навколо його локальної осі (2, 5) визначають вектором кутової швидкості обертання навколо спільної осі (7), який умовно повертають і суміщають з кожною локальною віссю (2, 5) обертання відповідного маховика (1, 4), причому напрямок обертання маховиків (1, 4) навколо відповідної локальної осі (2, 5) узгоджують з напрямком обертання повернутого вектора кутової швидкості. C2 2 (11) 1 3 80211 4 апарату, що є однією з причин наявності вібрацій. кого. Недоліком відомого гіроскопичного апаратa є Одним із побічних ефектів відомого способу пульсуючий характер тягового зусілля, що ствостворення прискорення Коріоліса є поява так зварюється в процесі його функціонування, та неможного гіроскопічного моменту (надалі - гіромоменливість використання на практиці більше ніж двох ту), який виникає в тому випадку, коли при оберробочих тіл (дисків) для збільшення сумарної тяги танні маховика навколо локальної осі його такого апарата із-за складності створення примуодночасно повертають навколо другої осі, що є сового нутаційного руху великого числа дисків. перпендикулярною до локальної осі маховика та Ниьзкочастотні пульсації сил тяги створюють знапроходить через центр мас маховика. чні вібрації, що діють на транспортні засоби, що Ефект появи гіромоменту використовується в використовують для руху відомий спосіб тяги, а гідродинамічних гіроскопах [див., наприклад, пасам гіроскопічний апарат характеризується низьтент Російської Федерації №95120281 "Гидродикою ефективністю перетворення обертового монамический гироскоп", дата публікації - 1997.10.27, менту силової установки в тягове зусилля переміМ. Кл. G01C19/00] та в гіродинах космічних апаращення в вертикальному напрямку. тів [див. патент РФ №1839792 "Силовое гироскоМетою пропонованого технічного рішення є пическое устройство для управления ориентацией спосіб створення умов обертання маховиків силокосмических аппаратов", дата публікації вих гіроскопів, при яких виникає значне тягове зу2005.05.10, М. Кл. B64G1/28, G01C19/00], де встасилля однонаправлених сил Коріоліса за рахунок новлюють маховики, що обертаються з великою відповідної синхронізації швидкості обертання макутовою швидкістю до 30000об./хв. ховиків без наявності вібрацій. При обертанні маховика такого силового гіроЗ цією метою в способі з обертанням першого скопa навколо локальної осі і при одночасному та другого маховиків навколо відповідних локальйого повороті навколо другої осі, що є перпендиних осей та з обертанням другого маховика в накулярною до локальної осі маховика та проходить прямку, протилежному до напрямку обертання через його центр мас, виникає силовий момент, першого маховика, з переміщенням маховиків по направлений ортогонально до обох осей, величизамкнутій траєкторії навколо спільної осі прецесії, на якого пропорційна величині кінетичного моменщо розташована поза центрами мас маховиків, ту маховика гіроскопa, та величині кутової швидкості повороту гіроскопa, навколо другої осі. згідно пропозиції, кут нахилу y локальної осі відВказаний гіроскопічний момент діє на транспортповідного маховика відносно спільної осі прецесії ний засіб (космічний апарат) і розвертає його, що в підтримують постійним, кутову швидкість w оберряді випадків є небажаним явищем. тання маховиків навколо локальної осі синхроніНайбільш близьким по технічній суті є гіроскозують з кутовою швидкістю W переміщення махопічний апарат, що містить два диски, встановлених виків навколо спільної осі, а напрям обертання один проти іншого в двох L-подібних рукоятках, що кожного маховика навколо його локальної осі випідтримують відповідні диски з можливістю їх обезначають вектором кутової швидкості обертання ртання в підшипниках в протилежних напрямках, навколо спільної осі, який умовно повертають і та кулачковий механізм [Патент США №5,024,112, суміщають з кожною локальною віссю обертання "Gyroscopic apparatus" 18.06. 1991г.]. L-подібні рувідповідного маховика, причому напрям обертання коятки встановлені на вертикальному валі рухомо маховика навколо відповідної локальної осі узговідносно спільної точки відхилення в вертикальджують з напрямком обертання повернутого векному напрямку, що розташована посередині між тора кутової швидкості. дисками-маховиками. Привід дисків забезпечує Другий варіант використання тягового зусилля обертання дисків-маховиків навколо двох локальКоріоліса з обертанням маховиків навколо відповіних осей в протилежних напрямках при одночасдних локальних осей, з одночасним переміщенням ному обертанні від рушія всього комплексу з махомаховиків по замкнутій траєкторії навколо спільної виків і L-подібних рукояток навколо другої осі прецесії, що розташована поза центрами мас вертикальної осі примусової прецесії, що є перпемаховиків, згідно пропозиції, обертають непарне ндикулярною до площини обертання локальних число маховиків, число яких не менше трьох, наосей. Кулачковий механізм виконує функцію відхивколо відповідних локальних осей, кут нахилу y лення дисків разом з локальними осями в вертикожної локальної осі відповідного маховика віднокальному напрямку при одночасному обертанні сно спільної осі прецесії підтримують постійним, дисків навколо локальних осей разом з примусокутову швидкість w обертання маховика навколо вою прецессією дисків навколо вертикальної осі локальної осі синхронізують з кутовою швидкістю прецесії. Таке відхилення дисків, що обертаються, W переміщення маховика навколо спільної осі, за допомогою кулачкового механізму створює локальні осі маховиків розташовують на однаковій примусову нутацію дисків у вигляді їх махів в веркутовій відстані навколо спільної осі примусової тикальному напрямку на протязі примусової препрецесії маховиків, а напрям обертання кожного цесії вказаних дисків. В результаті спільного обермаховика навколо його локальної осі визначають тового, прецесійного та нутаційного рухів обох правилом узгодження, за яким вектор кутової дисків виникає низькочастотне (до 100Гц) пульсушвидкості обертання навколо спільної осі прецесії юче тягове зусилля, направлене вверх вздовж умовно повертають і суміщають з кожною локальвертикальної осі примусової прецесії. При цьому ною віссю обертання відповідного маховика, прикут між локальною віссю обертання дисків та верчому напрям обертання маховика навколо відповітикальною віссю примусової прецесії постійно змідної локальної осі узгоджують з напрямком нюється в процесі роботи відомого гіроскопічного обертання повернутого вектора кутової швидкості. 5 80211 6 хронно переміщують разом з маховиком 1 по заКрім того, згідно пропозиції маховики перемімкнутій траєкторії 6 навколо спільної осі 7. При щують навколо спільної осі примусової прецесії по цьому вісь обертання 7 розташована поза центраеліптичній або круговій траєкторії. ми мас 8, 9 (9') відповідних маховиків 1, 4 (4'). Крім того, згідно пропозиції в якості маховика Спосіб використання тягового зусилля Коріолівикористовують кільцевий ротор з конусною внутса (Фіг.1) застосовують наступним чином. рішньою поверхнею. При обертанні маховика 1 з кутовою швидкісМіж досягнутою метою та технічною суттю існує безпосередній причинно-наслідковий зв'язок. тю w навколо локальної осі 2 і з одночасним його При складному обертально-поступальному рухові переміщенням зі швидкістю V виникає гіроскопічматеріальної точки з відповідною швидкістю вининий момент М, направлений перпендикулярно до кає прискорення Коріоліса, орієнтація якого є перлокальної осі 2. Для створення тягового зусилля пендикулярною до векторів лінійної та кутової двох однонаправлених сил Коріоліса на локальній швидкостей. Згідно пропонованого технічного ріосі 5, що встановлена напроти локальної осі 2, шення лінійне переміщення матеріальної точки встановлюють додатковий маховик 4 та розкручу(маховика), що обертається навколо локальної осі ють його з кутовою швидкістю w , в напрямку, прообертання, доповнено переміщенням маховика з тилежному до напрямку обертання першого маховідповідною швидкістю V по замкнутій траєкторії вика 1. При цьому маховик 4 переміщують з навколо осі, яка розташована за межами маховика швидкістю V в площині 3 навколо спільної осі 7 по на відповідній відстані. Оскільки швидкість V руху замкнутій траєкторії 6 синхронно з переміщенням маховика по замкнутій траєкторії, наприклад, по першого маховика 1. В запропонованих умовах колу, має лінійну складову, то в цьому випадку напрям сили Коріоліса Fk додаткового маховика 4 виникає прискорення Коріоліса, яке створює силоспівпадає з напрямком гіромоменту М, що діє на вий момент М, що діє на маховик. Синхронізація перший маховик 1, і компенсує його. В цьому можкутової швидкості обертання маховиків навколо на пересвідчитися, застосовуючи правило Жуковвідповідних локальних осей з кутовою швидкістю ського для додаткового маховика 4. Згідно цього переміщення маховиків навколо осі примусової правила вектор швидкості переміщення V поверпрецесії та підтримання постійного кута між кожтають на 90° в напрямку обертання вектора кутоною локальною віссю та віссю примусової прецесії вої швидкості w , в результаті чого визначають настворюють умови для усунення вібрацій в гіроскопрям сили Коріоліса Fk, що діє на додатковий пічних системах, що використовують пропоновамаховик 4. Сила Коріоліса Fk співпадає з напрямний спосіб. ком повернутого таким чином вектора швидкості На Фіг.1 показана схема, що пояснює суть V’. пропонованого рішення. Абсолютна величина сили Коріоліса Fk прямо На Фіг.2 показана схема, що пояснює другий пропорційна добутку кутової швидкості w на швидваріант способу використання сил Коріоліса. кість переміщення V та на масу м маховика, а саПерший варіант способу використання тяговоме: Fk=kмwV, де k - безрозмірний коефіцієнт прого зусилля Коріоліса (Фіг.1) що діє на перший мапорційності, що враховує геометричні розміри ховик 1, який обертається в напрямку С навколо маховика 4, та умови його синхронізації з кутовою локальної осі 2, розташованій в площині 3 (що швидкістю прецесійного руху. заштрихована на Фіг.1), реалізується за допомоМаховики 1 та 4 перемішують синхронно, загою обертання додаткового маховика 4 навколо вдяки чому є справедливим наступне співвіднолокальної осі обертання 5, що може співпадати з шення V/A=W, де W - кутова швидкість переміщенлокальною віссю 2 обертання першого маховика 1. ня маховиків 1 та 4 навколо спільної осі 7, Додатковий маховик 4 розкручують навколо локанаприклад, по колу 6. Для компенсації гіромоменту льної осі 5 і синхронно переміщують обидва махоΜ необхідно щоб виконувалася умова M=FkA, тобвики 1 та 4 по замкнутій траєкторії 6 навколо спіто М=kмwVВ= kмwА2Ω, звідки визначають відстань льної осі 7, що розташована на відстані А від А розташування додаткового маховика 4 відносно центрів мас 8 та 9, відповідно, маховиків 1 та 4. спільної осі 6: Локальну вісь 2 (5) орієнтують перпендикулярно Α=(Μ/( kмw W))0·5. або під відповідним кутом y до спільної осі 7. Другий варіант способу створення тягового зуЗгідно запропонованого рішення в найпростісилля декількох однонаправлених сил Коріоліса на шому випадку замкнута траєкторія 6 являє собою Фіг.2 застосовують аналогічно першому варіанту з коло з радіусом А. тією різницею, що локальні осі 2, 5 (5') маховиків 1, В ряді випадків є недоцільно (або неможливо) 4 та 4' розташовують на однаковій кутовій відстані встановити додатковий маховик на спільній лока(120°) одна від одної на конусній поверхні 3, що льній осі першого маховика, тому пропонується утворена обертанням локальних осей 2, 5, 5' надругий варіант способу використання тягового вколо спільної осі 7 примусової прецесії маховиків зусилля Коріоліса (Фіг.2), що дозволяє збільшити 1, 4 (4') та радіально заштрихована на Фіг.2. В сумарне тягове зусилля Коріоліса. Маховик 1 обенайпростішому випадку центри мас 8, 9 (9') всіх ртається з кутовою швидкістю w навколо локальмаховиків 1, 4 та 4' розташовують на однаковій ної осі 2, розташованій на поверхні 3 (заштриховавідстані А від спільної осі обертання 7. Для усуна радіально на Фіг.2). Спосіб реалізується за нення вібрацій, що зв'язані з наявністю так званих допомогою декількох (наприклад, двох) додатконутацій в гіроскопічних системах, згідно запропових маховиків 4, 4' в формі кільця з внутрішньою нованого способу кутову швидкість w обертання конусною поверхнею. Маховики 4 (4') розкручують маховиків 1, 4, 4' навколо локальних осей 2, 5, 5' навколо їх відповідних локальних осей 5, 5' і син 7 80211 8 (на Фіг.2 - трьох однонаправлених сил Коріоліса), синхронізують з кутовою швидкістю W примусової що дозволяє переміщати космічні апарати в проспрецесії маховиків таким чином, що W=iw, де - і торі без застосування реактивної тяги за рахунок ціле число. розкручування робочих тіл - маховиків та відповідНапрям обертання маховика 4 (4') на Фіг.2 наною їх синхронізацією з обертанням навколо співколо його локальної осі 5 (5') визначають запрольної осі. понованим правилом, за яким вектор кутової Враховуючи той факт, що Fk=kмwV значення k швидкості W обертання навколо спільної осі 7 умодля кільцевого маховика згідно розрахунків знаховно повертають, наприклад, по траєкторії 10 і судиться в межах p>k>0.58p. міщають з локальною віссю 5 (5') обертання відпоРозрахунки свідчать, що при масі кільцевого відного маховика 4 (4') (проміжне положення маховика м=1кг; k=1; швидкості обертання маховектора кутової швидкості W' при повороті показавика w =6000об/хв=100об/сек; швидкості переміно на Фіг.2 пунктиром). При цьому напрям оберщення маховиків навколо спільної осі V=6м/сек тання відповідної локальної осі 5 (5') повинен співможна отримати значення сили Коріоліса для одпадати з напрямком обертання повернутого ного маховика вектора кутової швидкості W'. F=1*1кг*100об/хв*6м/сек=600кг*м/сек2=600Ньютон Застосування запропонованого правила гарав системі СІ, що в 60 разів більше від маси махонтує, що для кожного додаткового маховика 4 (4') вика. забезпечується напрямок дії сили Коріоліса Fk (Fk'), Розрахункові дані підтверджено на експериякий співпадає з напрямком гіромоменту М, що діє ментальній гіродинамічній системі, що реалізована на перший маховик 1, і компенсує його. в відповідності до пропонованого способу ствоПри цьому сила Коріоліса Fk=kмwV на Фіг.1 та рення тягового зусилля Коріоліса. Фіг.2 направлена в тому ж напрямку що і момент М, в результаті чого виникає тягове зусилля, щонайменше пари однонаправлених сил Коріоліса Комп’ютерна верстка О. Гапоненко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for using coriolis acceleration for producing driving torque (variants)
Автори англійськоюLykhovyd Yurii Makarovych
Назва патенту російськоюСпособ использования ускорения кориолиса для создания вращающего момента (варианты)
Автори російськоюЛиховид Юрий Макарович
МПК / Мітки
МПК: B64G 1/28, G01C 19/00
Мітки: використання, варіанти, тягового, зусилля, спосіб, коріоліса
Код посилання
<a href="https://ua.patents.su/4-80211-sposib-vikoristannya-tyagovogo-zusillya-koriolisa-varianti.html" target="_blank" rel="follow" title="База патентів України">Спосіб використання тягового зусилля коріоліса (варіанти)</a>
Спосіб узгодження сил коріоліса
Номер патенту: 19713
Опубліковано: 15.12.2006
Автор: Лиховид Юрій Макарович
МПК: B64G 1/28, G01C 19/00
Мітки: сіль, спосіб, коріоліса, узгодження
Формула / Реферат:
1. Спосіб узгодження сил Коріоліса, що включає обертання робочих тіл (1а, 16), розподілених навколо відповідних локальних осей (2а, 2б), переміщення усіх робочих тіл по замкнутій траєкторії (5, 7) навколо спільної осі (3) та узгодження швидкості V переміщення кожного робочого тіла (1а, 16) навколо спільної осі (3) зі швидкістю ω обертання кожного робочого тіла (1а, 16) навколо відповідної локальної осі (2а, 2б), який відрізняється тим,...
Спосіб компенсації гіромоменту
Номер патенту: 15765
Опубліковано: 17.07.2006
Автор: Лиховид Юрій Макарович
МПК: B64G 1/28, G01C 19/00
Мітки: спосіб, гіромоменту, компенсації
Формула / Реферат:
1. Спосіб компенсації гіромоменту з обертанням робочого тіла навколо локальної осі з одночасним його переміщенням, який відрізняється тим, що обертають декілька додаткових робочих тіл, розподілених навколо відповідних локальних осей і переміщують усі робочі тіла по замкнутій траєкторії навколо спільної осі, яка розташована поза центрами мас робочих тіл.2. Спосіб за п. 1, який відрізняється тим, що робочі тіла примусово...
Спосіб компенсації сил гіроскопічного моменту
Номер патенту: 24572
Опубліковано: 10.07.2007
Автор: Лиховид Юрій Макарович
МПК: G01C 19/00, B64G 1/28
Мітки: спосіб, гіроскопічного, сіль, моменту, компенсації
Формула / Реферат:
1. Спосіб компенсації сил гіроскопічного моменту з обертанням робочого тіла (1) навколо локальної осі (5), з одночасним переміщенням робочого тіла (1) по замкнутій траєкторії (6) навколо осі примусової прецесії (4) та з узгодженням кутової швидкості Ω прецесії робочого тіла (1) з кутовою швидкістю ω обертання робочого тіла (1) навколо локальної осі (5), який відрізняється тим, що локальну вісь (5) обертання робочого тіла (1)...
Спосіб формування тягового зусилля у поляризованій електромагнітній системі
Номер патенту: 19092
Опубліковано: 25.12.1997
Автори: Місєвря Іван Васильович, Макаров Сергій Олегович, Мухомор Володимир Михайлович
МПК: F16K 31/02
Мітки: поляризованій, електромагнітний, тягового, системі, зусилля, спосіб, формування
Формула / Реферат:
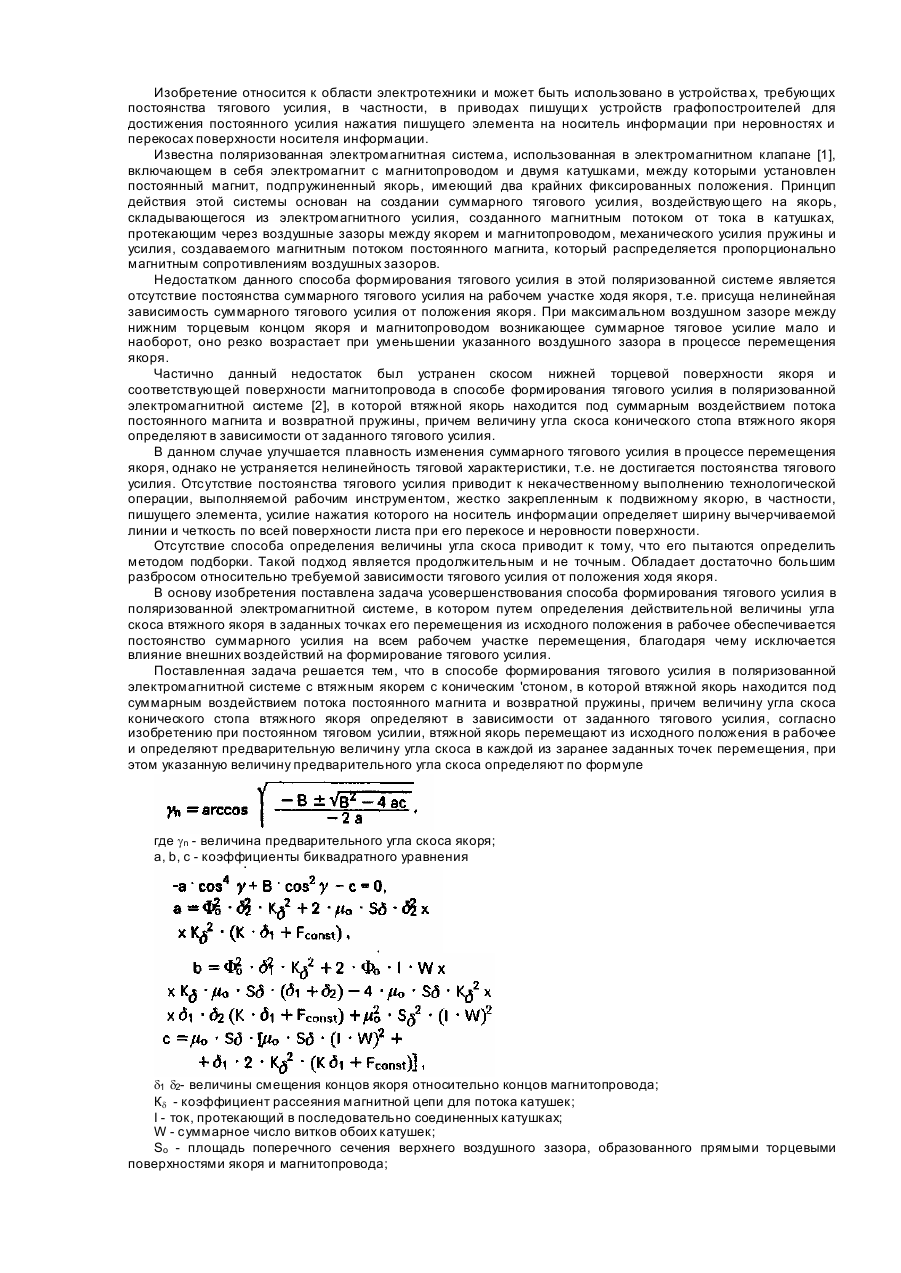
Способ формирования тягового усилия в поляризованной электромагнитной системе с втяжным якорем с коническим стопом, в которой втяжной якорь находится под суммарным воздействием потока постоянного магнита и возвратной пружины, причем величину угла скоса конического стопа втяжного якоря определяют в зависимости от заданного тягового усилия, отличающийся тем, что при постоянном тяговом усилии: втяжной якорь последовательно перемещают из...
Ергономічна поверхня захвату або передачі тягового зусилля
Номер патенту: 41388
Опубліковано: 17.09.2001
Автор: Мінгес Дональд Л.
МПК: A41D 19/00, A43B 13/14
Мітки: передачі, зусилля, ергономічна, поверхня, тягового, захвату
Формула / Реферат:
1. Эргономическая поверхность захвата или передачи тягового усилия, которая включает основную поверхность, причем она дополнительно включает структуру устройства для захвата и передачи тягового усилия на основной поверхности, в котором имеется по меньшей мере один выступ, выходящий по высоте за пределы основной поверхности, отличающаяся тем, что каждый выступ имеет пропорции, конфигурацию и расположение, соответствующие неоднородным...
Попередній патент: Спосіб одержання легованого полікристалічного тригліцинсульфату
Наступний патент: Пристрій для накістково-компресійного остеосинтезу
Випадковий патент: Сцинтилятор