Тренажер для навчання і контролю оптимальної посадки водія
Номер патенту: 68346
Опубліковано: 16.08.2004
Автори: Сирота Вячеслав Михайлович, Шолом Віктор Лазаревич, Ставцев Валерій Васильович, Сирота Ігор Вячеславович
Формула / Реферат
1. Тренажер для навчання і контролю оптимальної посадки водія, що містить регульоване сидіння, кермове колесо, блок сигналізації та обробки інформації, світлоінформатор у вигляді екрана і зв’язані з останнім датчики положення рук водія на кермовому колесі, який відрізняється тим, що він додатково містить приладдя у вигляді сукупності екзоскелетів, закріплених на ліктьових і колінних суглобах рук і ніг, обладнаних датчиками положення у вигляді кінцевих вимикачів (кінцевиків), датчик положення спини у вигляді підпружиненої пластини, шарнірно прикріпленої до жорсткої підставки, встановленої на бильці крісла з можливістю регулювання положення і обладнаної кінцевим вимикачем, датчики оптимального положення кистей рук на кермовому колесі, виконані у вигляді поперемінних струмопровідних перфорованих кілець на ізольованій поверхні кермового колеса в місцях стикання останнього з долонями рук водія, спорядженими рукавицями із струмопровідного матеріалу, причому одні кільця, наприклад непарні, з’єднані з масою тренажера, а парні, відповідні кожній руці водія, приєднані до двох однакових струмознімальних пристроїв у вигляді ізольованих кілець, закріплених на кермовому валу, і контактуючих з ними нерухомих щіток, причому щітки і кінцевики датчиків положення електрично підключені до входів пристрою узгодження, що містить формувачі вхідних сигналів, наприклад на основі тригерів Шмітта, інтегруючих RC-кіл і багатовхідної логічної схеми І, формуючої сигнал "ГОТОВИЙ", що надходить на вхід блока сигналізації та обробки інформації, при цьому світлоінформатор тренажера виконаний у вигляді непрозорого екрана з зображенням силуету водія, в місцях контролю робочої пози якого встановлені світлодіоди, підключені до виходів формувачів пристрою узгодження, що має можливість підключення до мікро-ЕОМ за допомогою стандартних інтерфейсів.
2. Тренажер за п. 1, який відрізняється тим, що блок сигналізації і обробки інформації містить приладдя керування, що включає пульт керування і логіку з елементами пам'яті, генератор стабільної частоти, таймер із секундоміром, лічильник помилок, блок індикації, звуковий сигналізатор і блок живлення, з'єднані між собою з можливістю забезпечення керування і автоматичного визначення результатів вправ при контролі оптимальної посадки і тренуванні водіїв за тимчасовими параметрами.
3. Тренажер за п. 1, який відрізняється тим, що він виконаний з можливістю забезпечення через світловий і звуковий канали зворотного зв'язку при наявності на світлоінформаторі силуету із світлодіодами в місцях контролю робочої пози водія і звукового сигналу при виконанні ним вправ.
Текст
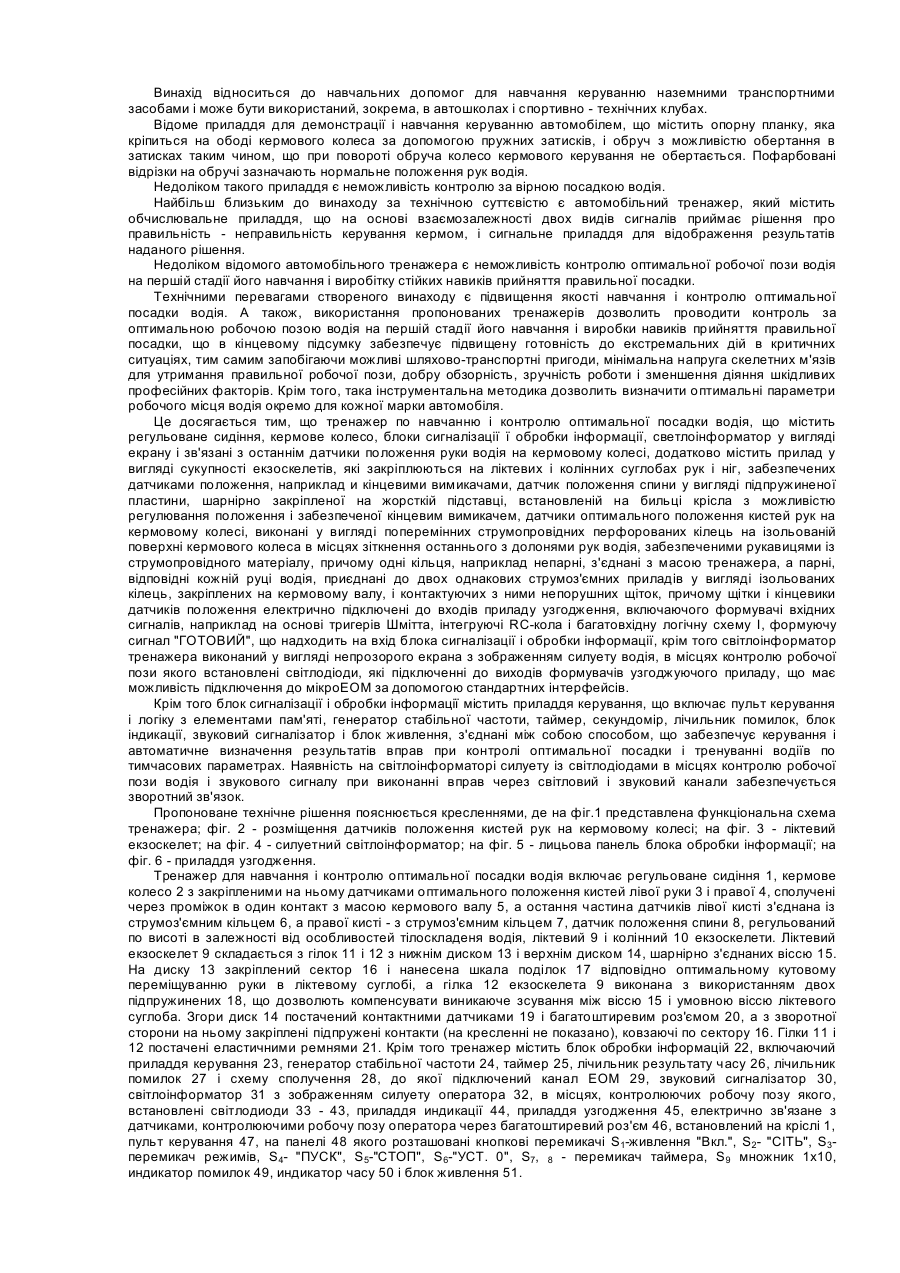
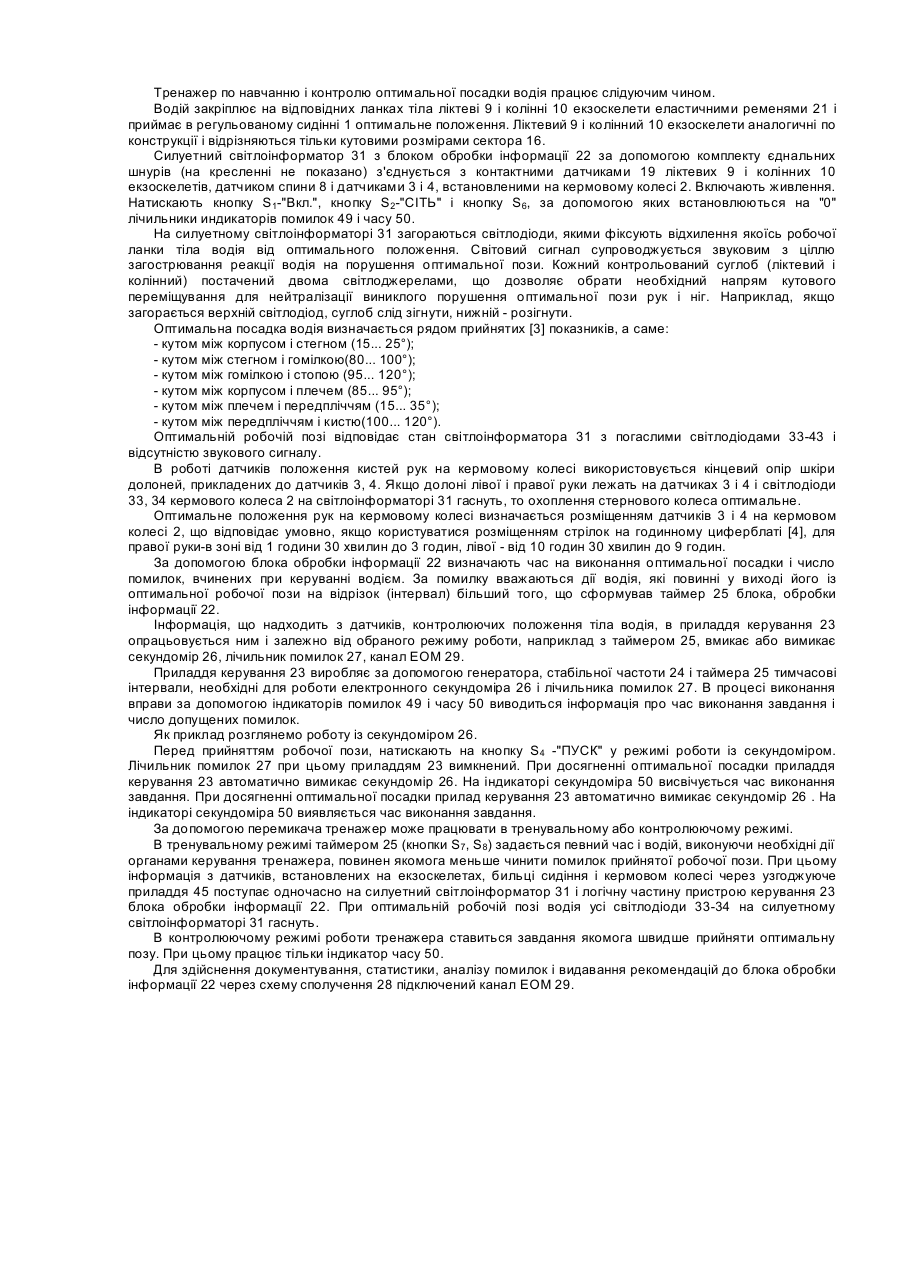
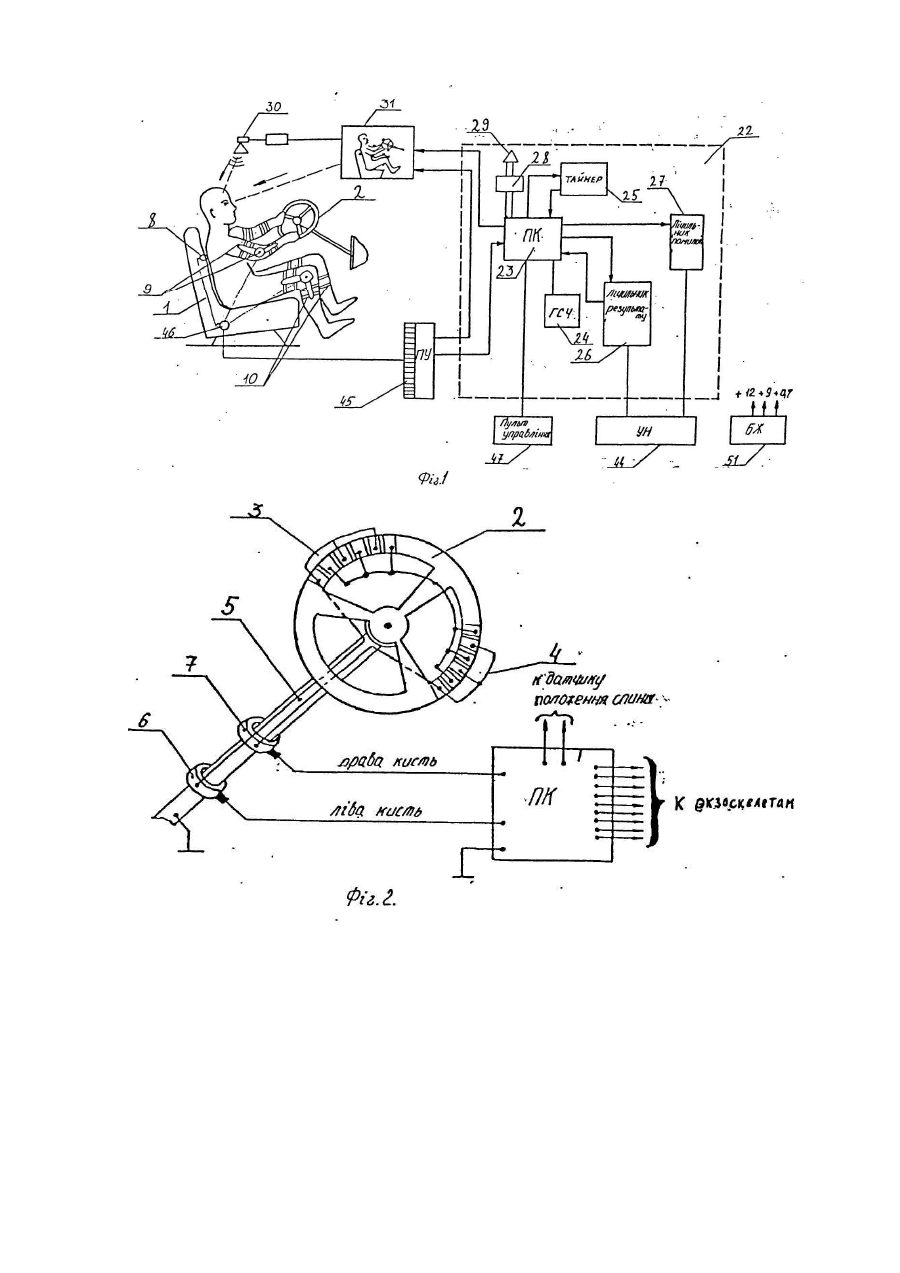
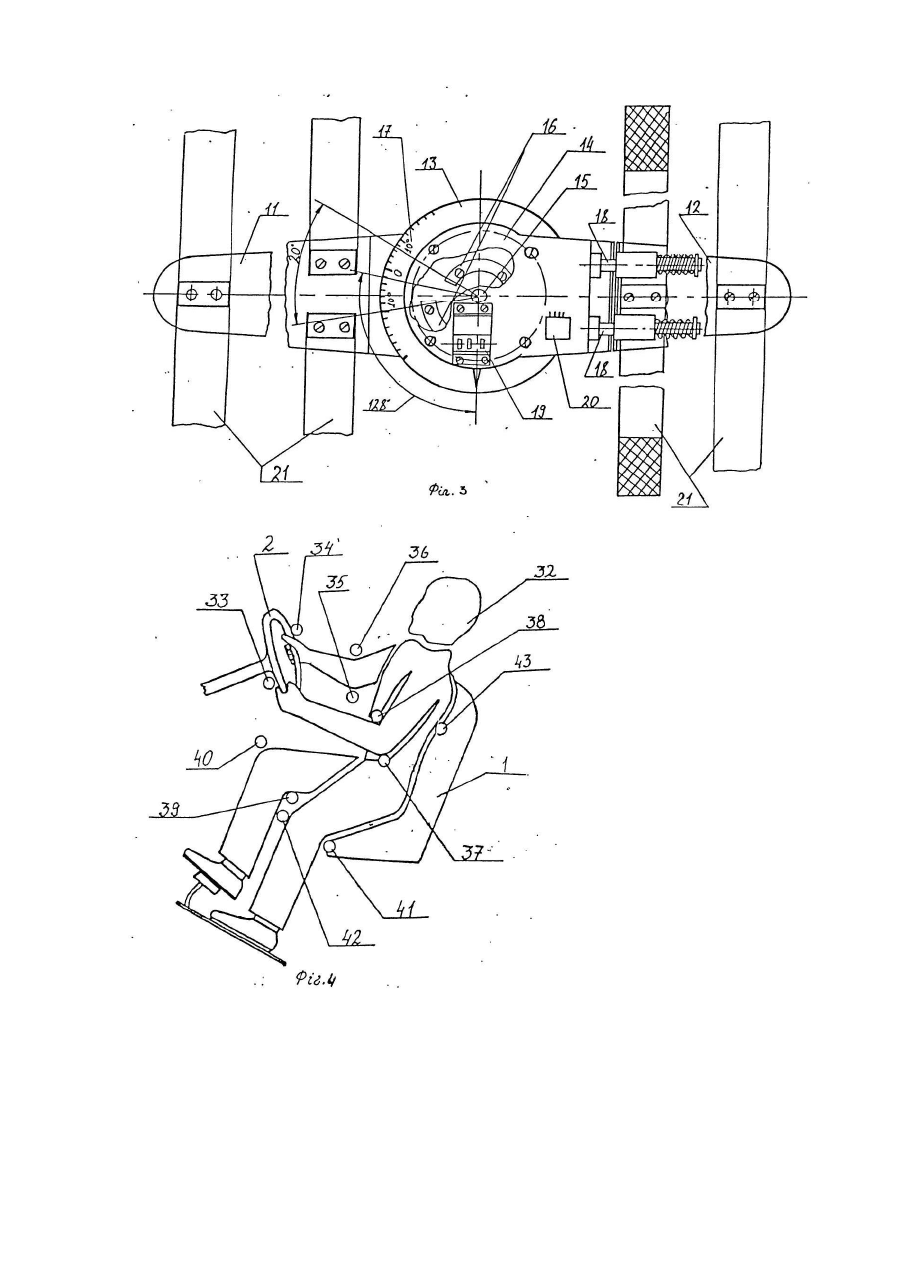
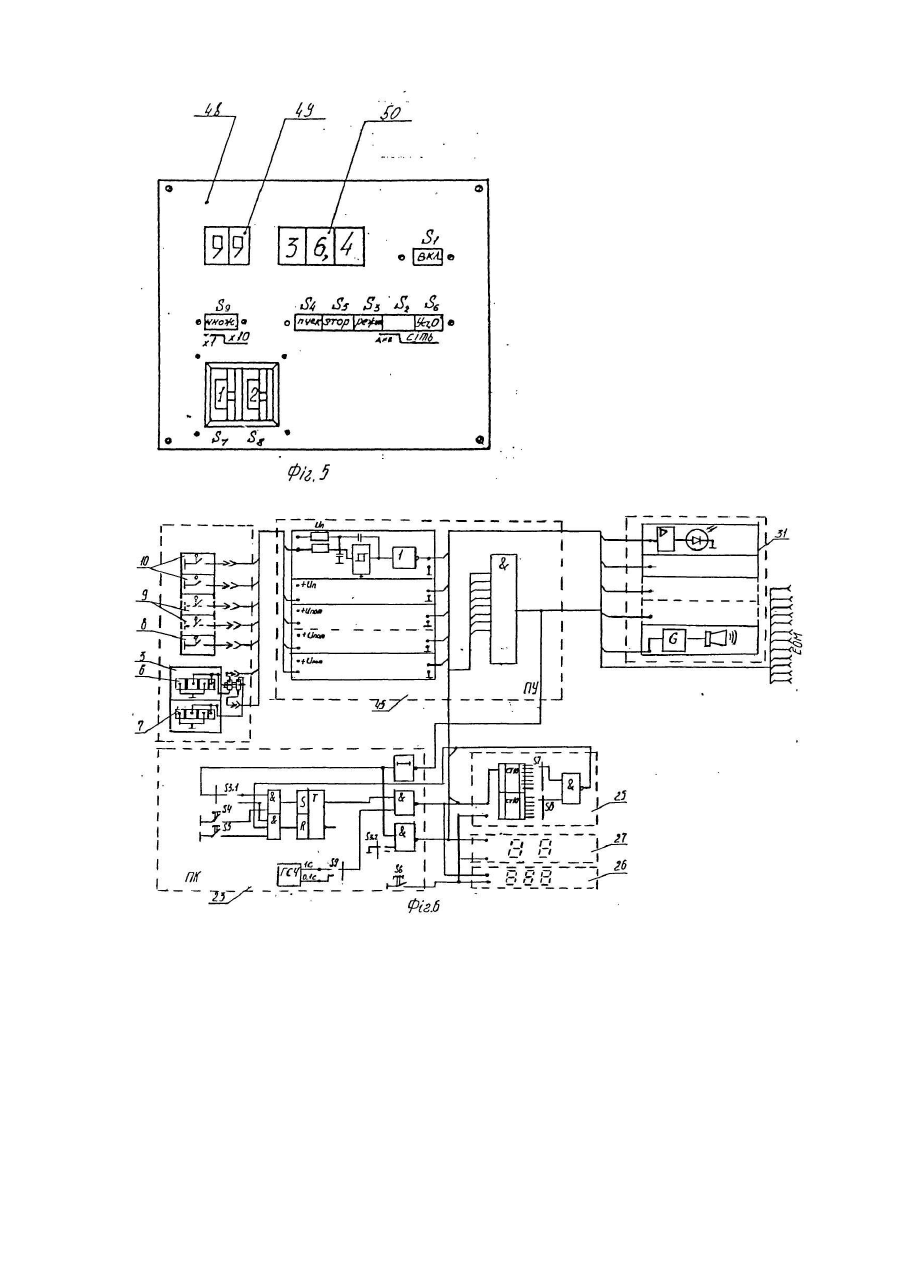
Винахід відноситься до навчальних допомог для навчання керуванню наземними транспортними засобами і може бути використаний, зокрема, в автошколах і спортивно - технічних клубах. Відоме приладдя для демонстрації і навчання керуванню автомобілем, що містить опорну планку, яка кріпиться на ободі кермового колеса за допомогою пружних затисків, і обруч з можливістю обертання в затисках таким чином, що при повороті обруча колесо кермового керування не обертається. Пофарбовані відрізки на обручі зазначають нормальне положення рук водія. Недоліком такого приладдя є неможливість контролю за вірною посадкою водія. Найбільш близьким до винаходу за технічною суттєвістю є автомобільний тренажер, який містить обчислювальне приладдя, що на основі взаємозалежності двох видів сигналів приймає рішення про правильність - неправильність керування кермом, і сигнальне приладдя для відображення результатів наданого рішення. Недоліком відомого автомобільного тренажера є неможливість контролю оптимальної робочої пози водія на першій стадії його навчання і виробітку стійких навиків прийняття правильної посадки. Технічними перевагами створеного винаходу є підвищення якості навчання і контролю оптимальної посадки водія. А також, використання пропонованих тренажерів дозволить проводити контроль за оптимальною робочою позою водія на першій стадії його навчання і виробки навиків прийняття правильної посадки, що в кінцевому підсумку забезпечує підвищену готовність до екстремальних дій в критичних ситуаціях, тим самим запобігаючи можливі шляхово-транспортні пригоди, мінімальна напруга скелетних м'язів для утримання правильної робочої пози, добру обзорність, зручність роботи і зменшення діяння шкідливих професійних факторів. Крім того, така інструментальна методика дозволить визначити оптимальні параметри робочого місця водія окремо для кожної марки автомобіля. Це досягається тим, що тренажер по навчанню і контролю оптимальної посадки водія, що містить регульоване сидіння, кермове колесо, блоки сигналізації ї обробки інформації, светлоінформатор у вигляді екрану і зв'язані з останнім датчики положення руки водія на кермовому колесі, додатково містить прилад у вигляді сукупності екзоскелетів, які закріплюються на ліктевих і колінних суглобах рук і ніг, забезпечених датчиками положення, наприклад и кінцевими вимикачами, датчик положення спини у вигляді підпружиненої пластини, шарнірно закріпленої на жорсткій підставці, встановленій на бильці крісла з можливістю регулювання положення і забезпеченої кінцевим вимикачем, датчики оптимального положення кистей рук на кермовому колесі, виконані у вигляді поперемінних струмопровідних перфорованих кілець на ізольованій поверхні кермового колеса в місцях зіткнення останнього з долонями рук водія, забезпеченими рукавицями із струмопровідного матеріалу, причому одні кільця, наприклад непарні, з'єднані з масою тренажера, а парні, відповідні кожній руці водія, приєднані до двох однакових струмоз'ємних приладів у вигляді ізольованих кілець, закріплених на кермовому валу, і контактуючих з ними непорушних щіток, причому щітки і кінцевики датчиків положення електрично підключені до входів приладу узгодження, включаючого формувачі вхідних сигналів, наприклад на основі тригерів Шмітта, інтегруючі RC-кола і багатовхідну логічну схему І, формуючу сигнал "ГОТОВИЙ", що надходить на вхід блока сигналізації і обробки інформації, крім того світлоінформатор тренажера виконаний у вигляді непрозорого екрана з зображенням силуету водія, в місцях контролю робочої пози якого встановлені світлодіоди, які підключенні до виходів формувачів узгоджуючого приладу, що має можливість підключення до мікроЕОМ за допомогою стандартних інтерфейсів. Крім того блок сигналізації і обробки інформації містить приладдя керування, що включає пульт керування і логіку з елементами пам'яті, генератор стабільної частоти, таймер, секундомір, лічильник помилок, блок індикації, звуковий сигналізатор і блок живлення, з'єднані між собою способом, що забезпечує керування і автоматичне визначення результатів вправ при контролі оптимальної посадки і тренуванні водіїв по тимчасових параметрах. Наявність на світлоінформаторі силуету із світлодіодами в місцях контролю робочої пози водія і звукового сигналу при виконанні вправ через світловий і звуковий канали забезпечується зворотний зв'язок. Пропоноване технічне рішення пояснюється кресленнями, де на фіг.1 представлена функціональна схема тренажера; фіг. 2 - розміщення датчиків положення кистей рук на кермовому колесі; на фіг. 3 - ліктевий екзоскелет; на фіг. 4 - силуетний світлоінформатор; на фіг. 5 - лицьова панель блока обробки інформації; на фіг. 6 - приладдя узгодження. Тренажер для навчання і контролю оптимальної посадки водія включає регульоване сидіння 1, кермове колесо 2 з закріпленими на ньому датчиками оптимального положення кистей лівої руки 3 і правої 4, сполучені через проміжок в один контакт з масою кермового валу 5, а остання частина датчиків лівої кисті з'єднана із струмоз'ємним кільцем 6, а правої кисті - з струмоз'ємним кільцем 7, датчик положення спини 8, регульований по висоті в залежності від особливостей тілоскладеня водія, ліктевий 9 і колінний 10 екзоскелети. Ліктевий екзоскелет 9 складається з гілок 11 і 12 з нижнім диском 13 і верхнім диском 14, шарнірно з'єднаних віссю 15. Нa диску 13 закріплений сектор 16 і нанесена шкала поділок 17 відповідно оптимальному кутовому переміщуванню руки в ліктевому суглобі, а гілка 12 екзоскелета 9 виконана з використанням двох підпружинених 18, що дозволють компенсувати виникаюче зсування між віссю 15 і умовною віссю ліктевого суглоба. Згори диск 14 постачений контактними датчиками 19 і багатоштиревим роз'ємом 20, а з зворотної сторони на ньому закріплені підпружені контакти (на кресленні не показано), ковзаючі по сектору 16. Гілки 11 і 12 постачені еластичними ремнями 21. Крім того тренажер містить блок обробки інформацій 22, включаючий приладдя керування 23, генератор стабільної частоти 24, таймер 25, лічильник результату часу 26, лічильник помилок 27 і схему сполучення 28, до якої підключений канал ЕОМ 29, звуковий сигналізатор 30, світлоінформатор 31 з зображенням силуету оператора 32, в місцях, контролюючих робочу позу якого, встановлені світлодиоди 33 - 43, приладдя индикації 44, приладдя узгодження 45, електрично зв'язане з датчиками, контролюючими робочу позу оператора через багатоштиревий роз'єм 46, встановлений на кріслі 1, пульт керування 47, на панелі 48 якого розташовані кнопкові перемикачі S1-живлення "Вкл.", S2- "СІТЬ", S3перемикач режимів, S4- "ПУСК", S5-"СТОП", S6-"УСТ. 0", S7, 8 - перемикач таймера, S9 множник 1x10, индикатор помилок 49, индикатор часу 50 і блок живлення 51. Тренажер по навчанню і контролю оптимальної посадки водія працює слідуючим чином. Водій закріплює на відповідних ланках тіла ліктеві 9 і колінні 10 екзоскелети еластичними ременями 21 і приймає в регульованому сидінні 1 оптимальне положення. Ліктевий 9 і колінний 10 екзоскелети аналогичні по конструкції і відрізняються тільки кутовими розмірами сектора 16. Силуетний світлоінформатор 31 з блоком обробки інформації 22 за допомогою комплекту єднальних шнурів (на кресленні не показано) з'єднується з контактними датчиками 19 ліктевих 9 і колінних 10 екзоскелетів, датчиком спини 8 і датчиками 3 і 4, встановленими на кермовому колесі 2. Включають живлення. Натискають кнопку S1-"Вкл.", кнопку S2-"СІТЬ" і кнопку S6, за допомогою яких встановлюються на "0" лічильники индикаторів помилок 49 і часу 50. На силуетному світлоінформаторі 31 загораються світлодіоди, якими фіксують відхилення якоїсь робочої ланки тіла водія від оптимального положення. Світовий сигнал супроводжується звуковим з ціллю загострювання реакції водія на порушення оптимальної пози. Кожний контрольований суглоб (ліктевий і колінний) постачений двома світлоджерелами, що дозволяє обрати необхідний напрям кутового переміщування для нейтралізації виниклого порушення оптимальної пози рук і ніг. Наприклад, якщо загорається верхній світлодіод, суглоб слід зігнути, нижній - розігнути. Оптимальна посадка водія визначається рядом прийнятих [3] показників, а саме: - кутом між корпусом і стегном (15... 25°); - кутом між стегном і гомілкою(80... 100°); - кутом між гомілкою і стопою (95... 120°); - кутом між корпусом і плечем (85... 95°); - кутом між плечем і передпліччям (15... 35°); - кутом між передпліччям і кистю(100... 120°). Оптимальній робочій позі відповідає стан світлоінформатора 31 з погаслими світлодіодами 33-43 і відсутністю звукового сигналу. В роботі датчиків положення кистей рук на кермовому колесі використовується кінцевий опір шкіри долоней, прикладених до датчиків 3, 4. Якщо долоні лівої і правої руки лежать на датчиках 3 і 4 і світлодіоди 33, 34 кермового колеса 2 на світлоінформаторі 31 гаснуть, то охоплення стернового колеса оптимальне. Оптимальне положення рук на кермовому колесі визначається розміщенням датчиків 3 і 4 на кермовом колесі 2, що відповідає умовно, якщо користуватися розміщенням стрілок на годинному циферблаті [4], для правоїруки-в зоні від 1 години 30 хвилин до 3 годин, лівої - від 10 годин 30 хвилин до 9 годин. За допомогою блока обробки інформації 22 визначають час на виконання оптимальної посадки і число помилок, вчинених при керуванні водієм. За помилку вважаються дії водія, які повинні у виході його із оптимальної робочої пози на відрізок (інтервал) більший того, що сформував таймер 25 блока, обробки інформації 22. Інформація, що надходить з датчиків, контролюючих положення тіла водія, в приладдя керування 23 опрацьовується ним і залежно від обраного режиму роботи, наприклад з таймером 25, вмикає або вимикає секундомір 26, лічильник помилок 27, канал ЕОМ 29. Приладдя керування 23 виробляє за допомогою генератора, стабільної частоти 24 і таймера 25 тимчасові інтервали, необхідні для роботи електронного секундоміра 26 і лічильника помилок 27. В процесі виконання вправи за допомогою індикаторів помилок 49 і часу 50 виводиться інформація про час виконання завдання і число допущених помилок. Як приклад розглянемо роботу із секундоміром 26. Перед прийняттям робочої пози, натискають на кнопку S4 -"ПУСК" у режимі роботи із секундоміром. Лічильник помилок 27 при цьому приладдям 23 вимкнений. При досягненні оптимальної посадки приладдя керування 23 автоматично вимикає секундомір 26. На індикаторі секундоміра 50 висвічується час виконання завдання. При досягненні оптимальної посадки прилад керування 23 автоматично вимикає секундомір 26 . На індикаторі секундоміра 50 виявляється час виконання завдання. За допомогою перемикача тренажер може працювати в тренувальному або контролюючому режимі. В тренувальному режимі таймером 25 (кнопки S7, S8) задається певний час і водій, виконуючи необхідні дії органами керування тренажера, повинен якомога меньше чинити помилок прийнятої робочої пози. При цьому інформація з датчиків, встановлених на екзоскелетах, бильці сидіння і кермовом колесі через узгоджуюче приладдя 45 поступає одночасно на силуетний світлоінформатор 31 і логічну частину пристрою керування 23 блока обробки інформації 22. При оптимальній робочій позі водія усі світлодіоди 33-34 на силуетному світлоінформаторі 31 гаснуть. В контролюючому режимі роботи тренажера ставиться завдання якомога швидше прийняти оптимальну позу. При цьому працює тільки індикатор часу 50. Для здійснення документування, статистики, аналізу помилок і видавання рекомендацій до блока обробки інформації 22 через схему сполучення 28 підключений канал ЕОМ 29.
ДивитисяДодаткова інформація
Назва патенту англійськоюSimulator for monitoring the optimal position of a driver in training
Назва патенту російськоюТренажер для контроля оптимального положения водителя при обучении
МПК / Мітки
МПК: G09B 9/04
Мітки: тренажер, контролю, навчання, посадки, водія, оптимальної
Код посилання
<a href="https://ua.patents.su/5-68346-trenazher-dlya-navchannya-i-kontrolyu-optimalno-posadki-vodiya.html" target="_blank" rel="follow" title="База патентів України">Тренажер для навчання і контролю оптимальної посадки водія</a>
Тренажер водія

Номер патенту: 48325
Опубліковано: 15.08.2002
Автори: Магерамов Лютфалій Курбан-Алієвич, Борисюк Михайло Дем'янович, Смоляков Василь Андрійович, Гужва Юрій Михайлович, Бусяк Юрій Митрофанович, Галушка Юрій Володимирович, Климов Віталій Федорович
МПК: G09B 9/00
Формула / Реферат:
Тренажер водія, що містить імітатор кабіни водія транспортного засобу, штатні органи керування, відеомонітор водія і штатні пульти, причому датчики положення органів керування і пульти через пристрій сполучення з'єднані з пультом інструктора, що включає системний блок керування та відеомонітор, який відрізняється тим, що у тренажер введені системний блок "Модель дорожньої обстановки", додатковий відеомонітор інструктора, сітьовий...
Пристрій для контролю наступання передсонного стану водія транспортного засобу

Номер патенту: 43148
Опубліковано: 15.11.2001
Автори: Левінзон Давид Іделевич, Головаха Роман Васильович, Чаусовський Григорій Олександрович
МПК: A61B 5/05
Мітки: засобу, водія, пристрій, транспортного, стану, контролю, наступання, передсонного
Формула / Реферат:
1. Пристрій для контролюнастунія перед сонного стану водія транспортного засобу, що містить реєстратор рухової активності водія і блок впливу на стан водія, який відрізняється тим, що реєстратор рухової активності водія виконано у вигляді ІЧ-випромінювача та ІЧ-фотоприймача, які зорієнтовано на механічно зафіксований навалу рульового колеса транспортного засобу оптичний відбивач ІЧ-фотоприймач через перетворювач “частота-код", компаратор...
Пристрій для контролю настання передсонного стану водія

Номер патенту: 43048
Опубліковано: 15.11.2001
Автори: Чаусовський Григорій Олександрович, Головаха Роман Васильович, Левінзон Давид Іделевич
МПК: A61B 5/05
Мітки: настання, стану, контролю, пристрій, передсонного, водія
Формула / Реферат:
Пристрій для контролю настання передсонного стану водія, який містить сенсорний перетворювач сили стискання стернового колеса і регулятор чутливості, які під'єднані через компаратор до ключа блока звукової сигналізації, який відрізняється тим, що сенсорний перетворювач механічно фіксується на рульовому колесі у вигляді двох металевих стрічок з різними стандартними електродними потенціалами.
Пристрій для контролю настання передсонного стану водія транспортного засобу
Номер патенту: 46562
Опубліковано: 15.05.2002
Автори: Чаусовський Григорій Олександрович, Головаха Роман Васильович, Левінзон Давид Іделевич
МПК: A61B 5/05
Мітки: настання, стану, передсонного, пристрій, водія, контролю, транспортного, засобу
Формула / Реферат:
1. Пристрій для контролю настання передсонного стану водія транспортного засобу, що містить реєстратор рухової активності водія і блок впливу на стан водія, який відрізняється тим, що реєстратор рухової активності водія виконано у вигляді механічно зафіксованої на валу рульового колеса автомобіля шторки, по обидві сторони якої закріплені постійний магніт та магнітокерована мікросхема з елементом Холла, яка під'єднана до перетворювача...
Пристрій для контролю настання передсонного стану водія транспортного засобу

Номер патенту: 47177
Опубліковано: 17.06.2002
Автори: Левінзон Давид Іделевич, Чаусовський Григорій Олександрович, Головаха Роман Васильович
МПК: A61B 5/05
Мітки: транспортного, контролю, водія, настання, засобу, пристрій, передсонного, стану
Формула / Реферат:
1. Пристрій для контролю настання передсонного стану водія транспортного засобу, що містить реєстратор рухової активності водія і блок впливу на стан водія, який відрізняється тим, що реєстратор рухової активності водія виконано у вигляді інфрачервоного (ІЧ) – випромінювача та ІЧ – фотоприймача, які розташовано по обидві сторони вмонтованої у обод рулевого колеса транспортного засобу порожнистої трубки, ІЧ – фотоприймач під'єднано до блока...