Пристрій для контролю роботи технологічного об’єкту
Номер патенту: 68874
Опубліковано: 10.04.2012
Автори: Николайчук Ярослав Миколайович, Ширмовська Надія Геннадіївна, Гладюк Володимир Михайлович

Формула / Реферат
Пристрій для контролю роботи технологічного об'єкту, що містить блок оцінки стану контролю, інформаційні входи якого є входами пристрою, з'єднанні із виходами об'єкта контролю, n-елементів АБО, n-індикаторів стану, n-схем порівняння, який відрізняється тим, що додатково введено m-об'єктів контролю, генератор імпульсів, вихід якого підключений до входу додатково введеного двійкового лічильника, перший вихід якого підключений до входу синхронізації блока оцінки контролю стану об'єкта, а другі виходи підключені до входів відповідних n-их схем порівняння, другі входи яких підключені до відповідних n-их виходів блока оцінки стану контролю, а виходи підключені до S-входів відповідних n-их RS-тригерів і одночасно до відповідних перших n-их входів логічних елементів АБО, виходи яких підключені до відповідних R-входів n-их RS-тригерів, виходи яких підключені до відповідних n-их входів індикаторів станів.
Текст
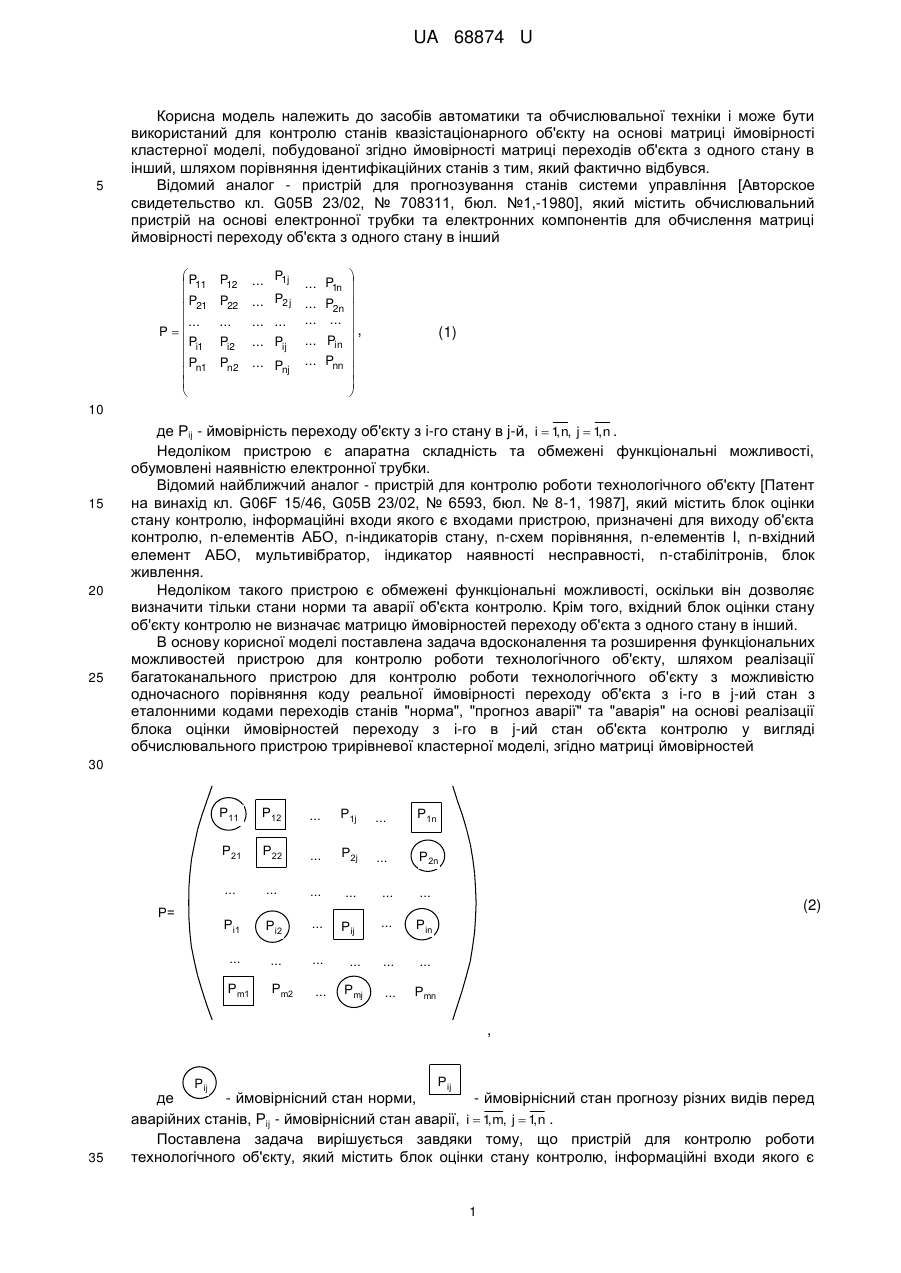
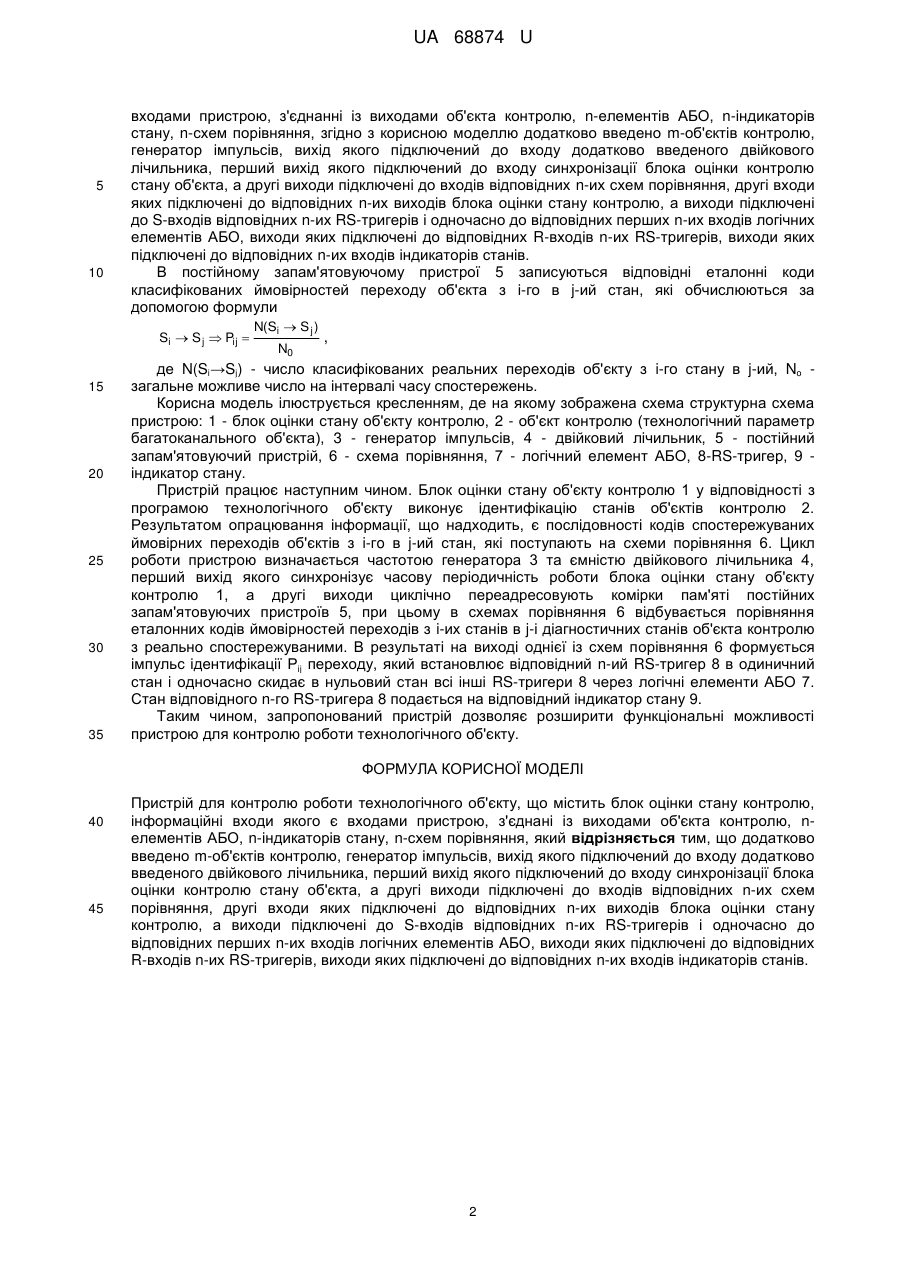
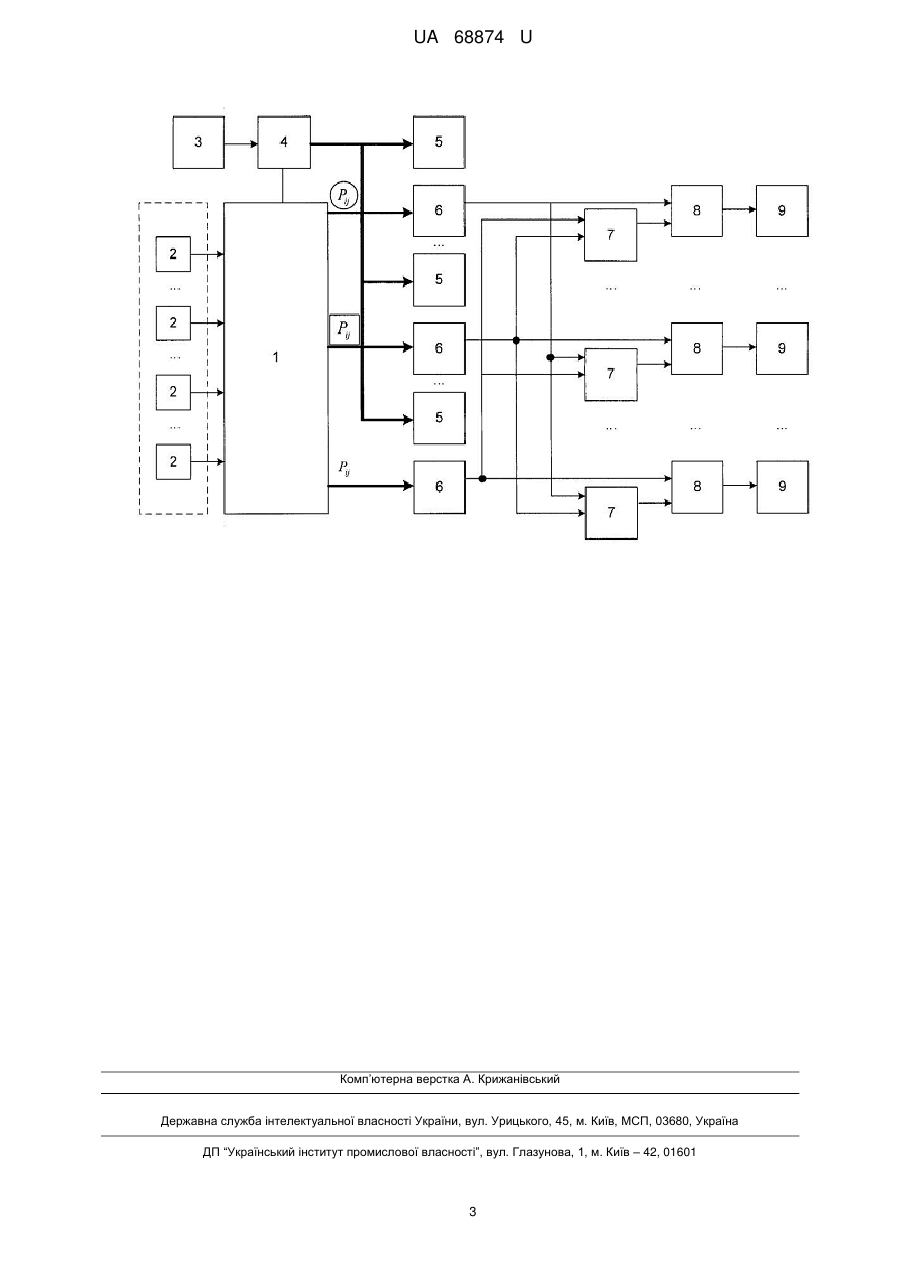
Реферат: Пристрій для контролю роботи технологічного об'єкту містить блок оцінки стану контролю, nелементи АБО, n-індикатори стану, n-схеми порівняння, m-об'єкти контролю, генератор імпульсів, двійковий лічильник, n-ні схеми порівняння, індикатори станів, RS-тригери, логічні елементи АБО. UA 68874 U (54) ПРИСТРІЙ ДЛЯ КОНТРОЛЮ РОБОТИ ТЕХНОЛОГІЧНОГО ОБ'ЄКТУ UA 68874 U UA 68874 U 5 Корисна модель належить до засобів автоматики та обчислювальної техніки і може бути використаний для контролю станів квазістаціонарного об'єкту на основі матриці ймовірності кластерної моделі, побудованої згідно ймовірності матриці переходів об'єкта з одного стану в інший, шляхом порівняння ідентифікаційних станів з тим, який фактично відбувся. Відомий аналог - пристрій для прогнозування станів системи управління [Авторское свидетельство кл. G05B 23/02, № 708311, бюл. №1,-1980], який містить обчислювальний пристрій на основі електронної трубки та електронних компонентів для обчислення матриці ймовірності переходу об'єкта з одного стану в інший P 11 P 21 ... P Pi1 Pn1 P12 P22 ... Pi2 ... P1j ... P1n ... P2 j ... P2n ... ... ... ... ... Pij ... Pin Pn2 ... Pnj ... Pnn , (1) 10 15 20 25 де Рij - ймовірність переходу об'єкту з i-го стану в j-й, i 1, n, j 1, n . Недоліком пристрою є апаратна складність та обмежені функціональні можливості, обумовлені наявністю електронної трубки. Відомий найближчий аналог - пристрій для контролю роботи технологічного об'єкту [Патент на винахід кл. G06F 15/46, G05B 23/02, № 6593, бюл. № 8-1, 1987], який містить блок оцінки стану контролю, інформаційні входи якого є входами пристрою, призначені для виходу об'єкта контролю, n-елементів АБО, n-індикаторів стану, n-схем порівняння, n-елементів І, n-вхідний елемент АБО, мультивібратор, індикатор наявності несправності, n-стабілітронів, блок живлення. Недоліком такого пристрою є обмежені функціональні можливості, оскільки він дозволяє визначити тільки стани норми та аварії об'єкта контролю. Крім того, вхідний блок оцінки стану об'єкту контролю не визначає матрицю ймовірностей переходу об'єкта з одного стану в інший. В основу корисної моделі поставлена задача вдосконалення та розширення функціональних можливостей пристрою для контролю роботи технологічного об'єкту, шляхом реалізації багатоканального пристрою для контролю роботи технологічного об'єкту з можливістю одночасного порівняння коду реальної ймовірності переходу об'єкта з i-го в j-ий стан з еталонними кодами переходів станів "норма", "прогноз аварії" та "аварія" на основі реалізації блока оцінки ймовірностей переходу з і-го в j-ий стан об'єкта контролю у вигляді обчислювального пристрою трирівневої кластерної моделі, згідно матриці ймовірностей 30 P11 ... P1j ... P1n P21 P22 ... P2j ... P2n ... ... ... ... ... ... Pi1 Pi2 ... Pij ... Pin ... ... ... ... ... ... Pm1 P= P12 Pm2 ... Pmj ... Pmn (2) , Pij 35 Pij де - ймовірнісний стан норми, - ймовірнісний стан прогнозу різних видів перед i 1 m, j 1 n . , , аварійних станів, Рij - ймовірнісний стан аварії, Поставлена задача вирішується завдяки тому, що пристрій для контролю роботи технологічного об'єкту, який містить блок оцінки стану контролю, інформаційні входи якого є 1 UA 68874 U 5 10 входами пристрою, з'єднанні із виходами об'єкта контролю, n-елементів АБО, n-індикаторів стану, n-схем порівняння, згідно з корисною моделлю додатково введено m-об'єктів контролю, генератор імпульсів, вихід якого підключений до входу додатково введеного двійкового лічильника, перший вихід якого підключений до входу синхронізації блока оцінки контролю стану об'єкта, а другі виходи підключені до входів відповідних n-их схем порівняння, другі входи яких підключені до відповідних n-их виходів блока оцінки стану контролю, а виходи підключені до S-входів відповідних n-их RS-тригерів і одночасно до відповідних перших n-их входів логічних елементів АБО, виходи яких підключені до відповідних R-входів n-их RS-тригерів, виходи яких підключені до відповідних n-их входів індикаторів станів. В постійному запам'ятовуючому пристрої 5 записуються відповідні еталонні коди класифікованих ймовірностей переходу об'єкта з і-го в j-ий стан, які обчислюються за допомогою формули Si S j Pij 15 20 25 30 35 N(Si S j ) N0 , де N(Si→Sj) - число класифікованих реальних переходів об'єкту з i-го стану в j-ий, No загальне можливе число на інтервалі часу спостережень. Корисна модель ілюструється кресленням, де на якому зображена схема структурна схема пристрою: 1 - блок оцінки стану об'єкту контролю, 2 - об'єкт контролю (технологічний параметр багатоканального об'єкта), 3 - генератор імпульсів, 4 - двійковий лічильник, 5 - постійний запам'ятовуючий пристрій, 6 - схема порівняння, 7 - логічний елемент АБО, 8-RS-тригер, 9 індикатор стану. Пристрій працює наступним чином. Блок оцінки стану об'єкту контролю 1 у відповідності з програмою технологічного об'єкту виконує ідентифікацію станів об'єктів контролю 2. Результатом опрацювання інформації, що надходить, є послідовності кодів спостережуваних ймовірних переходів об'єктів з i-гo в j-ий стан, які поступають на схеми порівняння 6. Цикл роботи пристрою визначається частотою генератора 3 та ємністю двійкового лічильника 4, перший вихід якого синхронізує часову періодичність роботи блока оцінки стану об'єкту контролю 1, а другі виходи циклічно переадресовують комірки пам'яті постійних запам'ятовуючих пристроїв 5, при цьому в схемах порівняння 6 відбувається порівняння еталонних кодів ймовірностей переходів з i-их станів в j-і діагностичних станів об'єкта контролю з реально спостережуваними. В результаті на виході однієї із схем порівняння 6 формується iмпульс iдентифікації Рij переходу, який встановлює відповідний n-ий RS-тригер 8 в одиничний стан i одночасно скидає в нульовий стан всі інші RS-тригери 8 через логічні елементи АБО 7. Стан відповідного n-го RS-тригера 8 подається на відповідний індикатор стану 9. Таким чином, запропонований пристрій дозволяє розширити функціональні можливості пристрою для контролю роботи технологічного об'єкту. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Пристрій для контролю роботи технологічного об'єкту, що містить блок оцінки стану контролю, інформаційні входи якого є входами пристрою, з'єднані із виходами об'єкта контролю, nелементів АБО, n-індикаторів стану, n-схем порівняння, який відрізняється тим, що додатково введено m-об'єктів контролю, генератор імпульсів, вихід якого підключений до входу додатково введеного двійкового лічильника, перший вихід якого підключений до входу синхронізації блока оцінки контролю стану об'єкта, а другі виходи підключені до входів відповідних n-их схем порівняння, другі входи яких підключені до відповідних n-их виходів блока оцінки стану контролю, а виходи підключені до S-входів відповідних n-их RS-тригерів і одночасно до відповідних перших n-их входів логічних елементів АБО, виходи яких підключені до відповідних R-входів n-их RS-тригерів, виходи яких підключені до відповідних n-их входів індикаторів станів. 2 UA 68874 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for production module operation control
Автори англійськоюNykolaichuk Yaroslav Mykolaiovych, Shyrmovska Nadiia Hennadiivna, Hladiuk Volodymyr Mykhailovych
Назва патенту російськоюУстройство для контроля работы технологического объекта
Автори російськоюНиколайчук Ярослав Николаевич, Ширмовская Надежда Геннадиевна, Гладюк Владимир Михайлович
МПК / Мітки
МПК: G05B 23/02, G06F 15/00
Мітки: роботи, технологічного, об'єкту, пристрій, контролю
Код посилання
<a href="https://ua.patents.su/5-68874-pristrijj-dlya-kontrolyu-roboti-tekhnologichnogo-obehktu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для контролю роботи технологічного об’єкту</a>
Пристрій для контролю роботи технологічного об’єкту
Номер патенту: 6593
Опубліковано: 29.12.1994
Автори: Женов Владислав Васильович, Мірецький Олександр Альфредович, Горшков Борис Генадійович, Скородинський Віктор Хаімович, Шпільберг Григорій Ізраілевич, Радіч Наталія Олександрівна, Данилов Євген Миколайович
МПК: G05B 19/048, G05B 23/02
Мітки: пристрій, контролю, роботи, технологічного, об'єкту
Формула / Реферат:
(57) Устройство для контроля работы технологического объекта, содержащее блок оценки состояния объекта контроля, информационные входы которого являются входами устройства, предназначенными для подключения к выходу объекта контроля, отличающееся тем, что в устройство введены n схем сравнения, n элементов И, n элементов ИЛИ, n индикаторов состояния, n - входовой элемент ИЛИ, где n - число объектов контроля, ждущий мультивибратор, индикатор...
Спосіб контролю режиму роботи технологічного об’єкта магістрального газопроводу
Номер патенту: 6996
Опубліковано: 15.06.2005
Автори: Коломєєв Валентин Миколайович, Старовойтов Володимир Гербертович, Лінчевський Михайло Петрович, Саркісов Володимир Олександрович, Колодяжний Валерій Васильович, Волчков Іван Іванович, Бантюков Євген Миколайович, Коток Валерій Борисович, Олійников Вадим Вікторович, Пітірімов Олександр Вікторович, Лопатін Володимир Олексійович, Сендеров Олег Олександрович
МПК: F17D 5/02
Мітки: газопроводу, технологічного, магістрального, роботи, контролю, спосіб, режиму, об'єкта
Формула / Реферат:
1. Спосіб контролю режиму роботи технологічного об'єкта магістрального газопроводу, що включає циклічний вимір значень параметра, що характеризує режим роботи технологічного об'єкта, у контрольованих вузлах газопроводу, запам'ятовування обмірюваних значень параметра, порівняння обмірюваного значення параметра з його режимними і граничними уставками, класифікацію ситуації або режиму при порушенні будь-якої з граничних або режимних уставок,...
Спосіб контролю режиму роботи технологічного об’єкта магістрального газопроводу
Номер патенту: 4185
Опубліковано: 17.01.2005
Автори: Іванишин Володимир Петрович, Бантюков Євген Миколайович, Беккер Михайло Вікторович, Кучмій Євген Антонович, Олійников Вадим Вікторович, Сендеров Олег Олександрович, Гавришенко Віктор Миколайович, Тисяк Володимир Михайлович, Коток Валерій Борисович, Пітірімов Олександр Вікторович, Ковалів Євстахій Осипович, Волчков Іван Іванович
МПК: F17D 5/02
Мітки: технологічного, спосіб, магістрального, режиму, роботи, газопроводу, об'єкта, контролю
Формула / Реферат:
1. Спосіб контролю режиму роботи технологічного об'єкта магістрального газопроводу, що включає циклічний вимір значень параметра, що характеризує режим роботи технологічного об'єкта, у контрольованих вузлах газопроводу, запам'ятовування обмірюваних значень параметра, порівняння обмірюваного значення параметра з його режимними і граничними уставками, класифікацію ситуації або режиму при порушенні кожної з граничних або режимних уставок, який...
Пристрій для контролю роботи посівного агрегату

Номер патенту: 26525
Опубліковано: 25.09.2007
Автори: Лушников Вячеслав Михайлович, Волков Ігор Васильович, Зінзура Василь Васильович, Ткаченко Ріта Петрівна
МПК: A01C 7/00
Мітки: посівного, агрегату, пристрій, контролю, роботи
Формула / Реферат:
Пристрій для контролю роботи посівного агрегату, що містить датчики контролю висіву насіння, які встановлюються в кожному висівному апараті, датчики контролю рівня насіння, датчик контролю пройденого шляху, блок світлової індикації, блок звукової сигналізації, який відрізняється тим, що датчики контролю через формувачі імпульсів з'єднані з першою однокристальною мікро-ЕОМ з заданою програмою обробки сигналів датчиків контролю, яка через...
Пристрій для контролю роботи двигуна
Номер патенту: 71262
Опубліковано: 15.11.2004
Автори: Розводюк Михайло Петрович, Мокін Борис Іванович, Жуков Сергій Олександрович
МПК: G07C 3/10
Мітки: двигуна, контролю, пристрій, роботи
Формула / Реферат:
Пристрій для контролю роботи двигуна, який складається з сенсора температури, аналого-цифрового перетворювача, індикатора, який відрізняється тим, що в нього введені перший, другий та третій функціональні перетворювачі відповідно, блок задання опору обмотки якоря двигуна, блок задання опору обмотки збудження двигуна, блок задання напруги мережі, сенсор напруги якірної обмотки двигуна, блок задання нижньої межі допустимого інтервалу зміни...
Попередній патент: Спосіб моделювання ушкодження міокарда алюмінію хлоридом
Наступний патент: Робочий орган динамічної дії
Випадковий патент: Електронагрівна курильна система з внутрішнім або зовнішнім нагрівачем