Спосіб регулювання режимів функціонування робочих органів зернозбирального комбайна
Номер патенту: 69913
Опубліковано: 25.05.2012
Автори: Смолінський Станіслав Вікторович, Аніскевич Леонід Володимирович, Войтюк Дмитро Григорович
Формула / Реферат
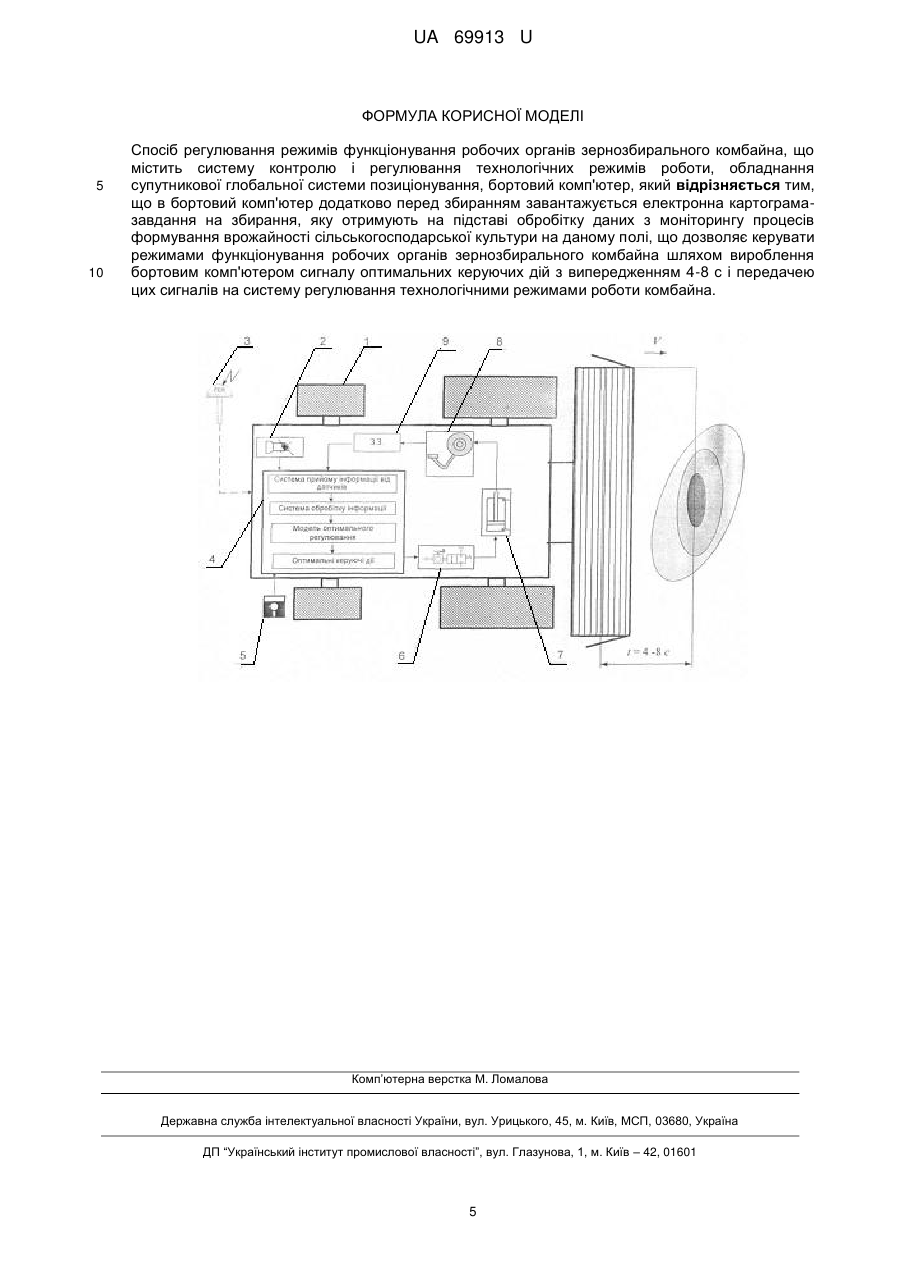
Спосіб регулювання режимів функціонування робочих органів зернозбирального комбайна, що містить систему контролю і регулювання технологічних режимів роботи, обладнання супутникової глобальної системи позиціонування, бортовий комп'ютер, який відрізняється тим, що в бортовий комп'ютер додатково перед збиранням завантажується електронна картограма-завдання на збирання, яку отримують на підставі обробітку даних з моніторингу процесів формування врожайності сільськогосподарської культури на даному полі, що дозволяє керувати режимами функціонування робочих органів зернозбирального комбайна шляхом вироблення бортовим комп'ютером сигналу оптимальних керуючих дій з випередженням 4-8 с і передачею цих сигналів на систему регулювання технологічними режимами роботи комбайна.
Текст
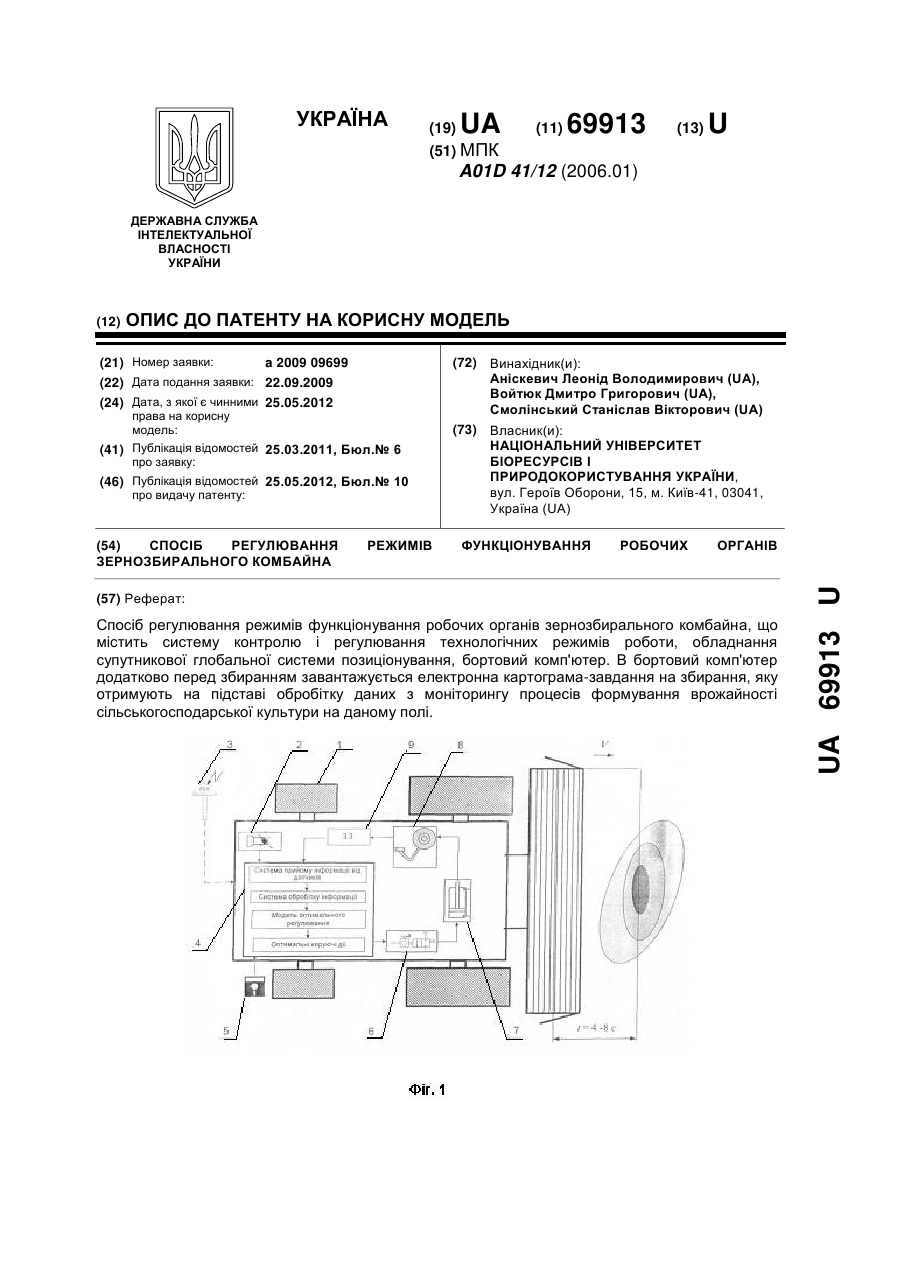
Реферат: Спосіб регулювання режимів функціонування робочих органів зернозбирального комбайна, що містить систему контролю і регулювання технологічних режимів роботи, обладнання супутникової глобальної системи позиціонування, бортовий комп'ютер. В бортовий комп'ютер додатково перед збиранням завантажується електронна картограма-завдання на збирання, яку отримують на підставі обробітку даних з моніторингу процесів формування врожайності сільськогосподарської культури на даному полі. UA 69913 U (12) UA 69913 U UA 69913 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі сільськогосподарського машинобудування, зокрема до способів регулювання режимів функціонування робочих органів зернозбиральних комбайнів. Спосіб регулювання режимів функціонування робочих органів зернозбирального комбайна визначається способом збирання зернових культур. Як відомо найбільш поширеним на даний час є комбайновий спосіб збирання [Погорілець О.М., Живолуп Г.І. Зернозбиральні комбайни. К: Урожай, 1994. – 232 с.] із застосуванням самохідних зернозбиральних комбайнів, які складаються з жатки, похилої камери, молотарки, завантажувальних, очищувальних і транспортуючих пристроїв, зернового бункера, вивантажувальних робочих органів, ходової частини, двигуна тощо. У відповідності до технологічної схеми роботи, зернозбиральні комбайни мають досить складну систему привода робочих органів, яка характеризується складністю машини в цілому і комплексною системою управління комбайном зокрема і, як наслідок, не забезпечує плавного завантаження робочих систем комбайна, що негативно позначається на затратах енергії та якісних показниках збирання урожаю і надійності зернозбирального комбайна та його робочих органів, а також системи приводу внаслідок істотних коливань і значних силових збурень на робочих органах при зміні кінематичних режимів роботи. Останнє пов'язано із різними факторами, основний з яких - істотні коливання врожайності зернових культур по площі поля, а отже, і нерівномірне завантаження комбайна хлібною масою. Відоме застосування в конструкції зернозбиральних комбайнів автоматичного регулювання завантаження молотарки комбайна хлібною масою [Теория, конструкция и расчет сельскохозяйственных машин/ Под. ред. Е.С. Босого. - М.: Машиностроение, 1977. - 568 с.], що дозволяє підвищувати цим якість отриманого врожаю і уникнути пікових завантажень робочих органів, що можуть призвести до забивання пристроїв і зупинки їх роботи. Автоматичний регулятор складається із датчика полозкового типу товщини шару хлібної маси, який встановлений в похилій камері, розподільника, дроселя, гідроциліндра, варіатора регулювання швидкістю комбайна. Якщо товщина хлібної маси в похилій камері відповідає питомій пропускній здатності комбайна, то розподільник встановлюється в нейтральне положення, а масло іде на злив в масляний бак. Якщо товщина хлібної маси в похилій камері різко змінюється, це призводить до переміщення датчика товщини шару хлібної маси. Масло подається в одну з порожнин гідроциліндра керування варіатором швидкості руху комбайна і змінюється швидкість руху і, одночасно з цим, подача хлібної маси в похилу камеру, забезпечуючи її оптимальне значення. За прототип вибраний спосіб регулювання режимів функціонування робочих органів і швидкості руху зернозбирального комбайна [Патент ФРН №288085 DE А 01 D41/12 Verfahren zur Regelung der Fahrgeschwindigkeit und der Arbeitsorgane im Maehdrescher nach der Zuflussdicht der Gutmasse / P. Feiffer, A. Feiffer, K. Algenstaedt, A. Spendler, J. Voigt. - заявка № 3330678; опубл. 21.03.1991], який полягає у застосуванні ультразвуку для визначення місцевизначеної врожайності зернової культури перед жаткою комбайна, а також датчиків реєстрації крутного моменту на валу молотильного барабана, просвіту між барабаном та підбарабанням, параметрів і режимів роботи соломотряса, вмісту зерна в полові тощо. Отримана від датчиків інформація обробляється в бортовому комп'ютері, який встановлено в кабіні комбайна, в результаті чого видаються команди на зміну швидкості руху зернозбирального комбайна і відповідних регулювань робочих органів. Недоліком наведеного способу регулювання режимів функціонування робочих органів і швидкості руху зернозбирального комбайна є великий (як показує практика, потрібно не менше 4-8 с) час реакції системи регулювання і виконавчих механізмів на зміну інтенсивності завантаження молотарки комбайна. Це пояснюється тим, що більшість збиральних машин складається з технологічних вузлів (двигун, молотарка, система очистки тощо) з великими масогабаритними характеристиками і моментами інерції. Тому, для реакції системи на заданий режим роботи необхідний певний час (до 4-8 с), неврахування якого призводить до нерівномірної подачі вороху сільськогосподарської культури на молотильні, очищувальні та інші робочі органи комбайна. В деяких випадках подібні системи автоматичного регулювання режимів функціонування робочих органів і швидкості руху комбайна не покращують, а навіть погіршують рівномірність завантаження силових агрегатів комбайна, а отже, такі системи регулювання не забезпечують необхідну ефективність процесу збирання. Тому треба мати таку систему автоматичного завантаження робочих органів комбайна, яка б дозволила завчасно (за 4-8 с) передбачати перехід до необхідних значень параметрів і режимів функціонування робочих органів зернозбирального комбайна, щоб забезпечити чітке відпрацьовування перехідних процесів, що відбуваються в механізмах комбайна. 1 UA 69913 U 5 10 15 20 25 30 35 40 45 50 55 Корисною моделлю поставлено задачу забезпечити підвищення ефективності роботи і надійності зернозбирального комбайна, його робочих органів та приводу шляхом рівномірного завантаження комбайна хлібною масою. Поставлена задача вирішується тим, що при збиранні зернових культур використовується зернозбиральний комбайн з системою контролю і регулювання технологічних режимів роботи, на борту якого є обладнання супутникової глобальної системи позиціонування (ГСП), бортовий комп'ютер, в який додатково перед збиранням завантажується електронна картограма-завдання на збирання, яка отримана на підставі обробітку даних з моніторингу процесів формування врожайності сільськогосподарської культури на даному полі, і це дозволяє керувати параметрами і режимами функціонування робочих органів зернозбирального комбайна шляхом вироблення бортовим комп'ютером сигналу оптимальних керуючих дій з випередженням 4-8 с і передачею цих сигналів на систему регулювання технологічними режимами роботи комбайна. На кресленні наведена блок-схема алгоритму реалізації способу регулювання режимів функціонування робочих органів зернозбирального комбайна. Спосіб регулювання режимами функціонування робочих органів зернозбирального комбайна реалізується застосуванням на комбайні 1 системи датчиків 2 стану машини, що дозволяють визначати в реальному часі такі параметри і режими роботи комбайна, як швидкість руху, частота обертання молотильного барабана, кінематичні параметри системи очищення тощо, обладнання ГСП 3, що забезпечує визначення світових координат в будь-якій точці поля в будь-який момент часу та бортовий комп'ютер 4 із завантаженою електронною картограмоюзавданням 5 на виконання технологічного процесу збирання та програмним забезпеченням для зчитування інформації з картограми-завдання 5 з випередженням 4-8 с, а також прийому сигналу від датчиків 2 та обробки отриманої інформації на підставі моделі оптимального регулювання, що закладена в програмному забезпеченні, і формування оптимальних керуючих дій з передачею їх на відповідні розподільники 6 (гідравлічного, пневматичного, електричного тощо типу) для управління об'єктами керування 8 за допомогою виконавчих механізмів 7. Об'єктами керування 8 при цьому можуть виступати варіатор ходової системи збиральної машини (зміна швидкості руху), молотильний барабан (зміна частоти обертання), дека молотильного барабана (зміна зазорів між барабаном та підбарабанням) тощо. Для контролю величин розрахованих режимів роботи машини та стану об'єкту регулювання існує ланка зворотного зв'язку 9. Електронна картограма-завдання 5 на збирання сільськогосподарської культури на даному полі розробляється перед збиранням польових сільськогосподарських культур під час формування врожайності на цьому полі шляхом визначення варіацій врожайності культури по площі поля за допомогою моніторингу стану рослин. Знання стану хлібостою перед жаткою комбайна 1 з випередженням 4-8 с дозволяє плавно змінювати режими роботи об'єктів керування 8 за допомогою відповідних виконавчих механізмів 7. Такий підхід дозволяє забезпечити керування технологічним процесом збирання зернових культур шляхом регулювання параметрів функціонування зернозбирального комбайна в автоматичному (в залежності від рівня і стану врожайності сільськогосподарської культури) режимі, що значно підвищує ефективність його роботи. При цьому досягається максимальна ефективність роботи комбайна внаслідок можливості передбачити перебіг технологічного процесу збирання зернових культур. В процесі роботи комбайна 1, згідно з способом регулювання режимів функціонування робочих органів зернозбирального комбайна, що патентується, визначається в реальному часі поточна робоча швидкість V руху машини, а також ряд параметрів, які виміряні системою датчиків 2. Обладнання ГСП 3 обчислює координати, в яких знаходиться комбайн 1 в даний момент часу, а бортовий комп'ютер 4 розраховує координати точки поля, в якій збиральна машина буде через t=4-8 с. Для цих координат по даних електронної картограми-завдання 5 розраховується рівень і стан врожайності сільськогосподарської культури, що збирається, проводиться (на підставі моделі оптимального регулювання) обробка комплексу навігаційної та телеметричної інформації про стан функціонування комбайну і виконується зміна режимів роботи об'єктів автоматичного керування 8. Враховуючи те, що керування режимами роботи комбайна виконується з випередженням t=4-8 с досягається значне підвищення ефективності роботи і надійності зернозбирального комбайна, його робочих органів та приводу завдяки рівномірному завантаженню комбайна хлібною масою. 60 2 UA 69913 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Спосіб регулювання режимів функціонування робочих органів зернозбирального комбайна, що містить систему контролю і регулювання технологічних режимів роботи, обладнання супутникової глобальної системи позиціонування, бортовий комп'ютер, який відрізняється тим, що в бортовий комп'ютер додатково перед збиранням завантажується електронна картограмазавдання на збирання, яку отримують на підставі обробітку даних з моніторингу процесів формування врожайності сільськогосподарської культури на даному полі, що дозволяє керувати режимами функціонування робочих органів зернозбирального комбайна шляхом вироблення бортовим комп'ютером сигналу оптимальних керуючих дій з випередженням 4-8 с і передачею цих сигналів на систему регулювання технологічними режимами роботи комбайна. Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for regulating harvester working members operation modes
Автори англійськоюAniskevych Leonid Volodymyrovych, Voitiuk Dmytro Hryhorovych, Smolinskyi Stanislav Viktorovych
Назва патенту російськоюСпособ регулирования режимов функционирования рабочих органов зерноуборочного комбайна
Автори російськоюАнискевич Леонид Владимирович, Войтюк Дмитрий Григорьевич, Смолинский Станислав Викторович
МПК / Мітки
МПК: A01D 41/12
Мітки: зернозбирального, комбайна, робочих, функціонування, спосіб, регулювання, режимів, органів
Код посилання
<a href="https://ua.patents.su/5-69913-sposib-regulyuvannya-rezhimiv-funkcionuvannya-robochikh-organiv-zernozbiralnogo-kombajjna.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання режимів функціонування робочих органів зернозбирального комбайна</a>
Спосіб і пристрій для регулювання щонайменше одного робочого параметра рабочих органів зернозбирального комбайна
Номер патенту: 84269
Опубліковано: 10.10.2008
Автори: Баумгартен Йоахім, Бенке Віллі, Фітцнер Вернер
МПК: A01D 41/127
Мітки: органів, зернозбирального, спосіб, щонайменше, робочого, комбайна, рабочих, одного, параметра, регулювання, пристрій
Формула / Реферат:
1. Спосіб регулювання щонайменше одного робочого параметра робочих органів зернозбирального комбайна, причому робочі органи комбайна утворені молотильними органами, а також розташованими за ними сепараційними органами і щонайменше одним зерноочисним пристроєм, що включає зерноочисні органи, а зерноочисний пристрій функціонально з'єднаний за допомогою щонайменше одного зворотного пристрою з молотильними органами, який відрізняється тим, що до...
Спосіб експлуатації робочих органів збирального комбайна
Номер патенту: 48459
Опубліковано: 25.03.2010
Автори: Бойко Анатолій Іванович, Лелюк Андрій Олександрович, Чапенко Оксана Сергіївна, Мороз Микола Миколайович
МПК: A01D 75/00
Мітки: спосіб, комбайна, робочих, експлуатації, органів, збирального
Формула / Реферат:
Спосіб експлуатації робочих органів збирального комбайна, при якому робочі органи розташовані в послідовному технологічному ланцюзі роботи, який відрізняється тим, що на робочі органи встановлюють датчики визначення навантаження робочих органів і при перевищенні кількості надходження маси продукту, що збирають, хоча б на один з робочих органів, ланцюг попередніх робочих органів примусово вимикається.
Спосіб автоматичного регулювання завантаження зернозбирального комбайна
Номер патенту: 67447
Опубліковано: 27.02.2012
Автори: Бісюк Віктор Анатолійович, Осадчий Сергій Іванович, Дідик Олександр Костянтинович, Віхрова Лариса Григорівна, Мірошниченко Марія Сергіївна
МПК: A01D 41/12
Мітки: спосіб, завантаження, зернозбирального, регулювання, комбайна, автоматичного
Формула / Реферат:
Спосіб автоматичного регулювання завантаження зернозбирального комбайна, що включає керування поступальною швидкістю комбайна за сигналом різниці відношень частоти обертання молотильного барабана до частоти обертання вала двигуна, виміряних в ручному та автоматичному режимах, який відрізняється тим, що з метою підвищення точності регулювання враховують не лише знак різниці відношень частот обертання молотильного барабана та вала двигуна, а й...
Навісний подрібнювач соломи до зернозбирального комбайна

Номер патенту: 60828
Опубліковано: 25.06.2011
Автор: Шаповалов Віктор Іванович
МПК: A01F 12/40
Мітки: подрібнювач, соломи, зернозбирального, навісний, комбайна
Формула / Реферат:
Навісний подрібнювач соломи до зернозбирального комбайна, що містить подрібнюючий апарат, який має подрібнюючий барабан з протирізом, поперечний шнек для відводу соломистої маси, поміщений у кожух з отвором, і вентилятор з пневмотрубопроводом, який відрізняється тим, що подрібнюючий барабан і вентилятор виконані на одному валу, причому вентилятор оснащений всмоктувальним патрубком, отвір якого підведений збоку, до зони кінцевої частини торця...
Навісний подрібнювач соломи до зернозбирального комбайна
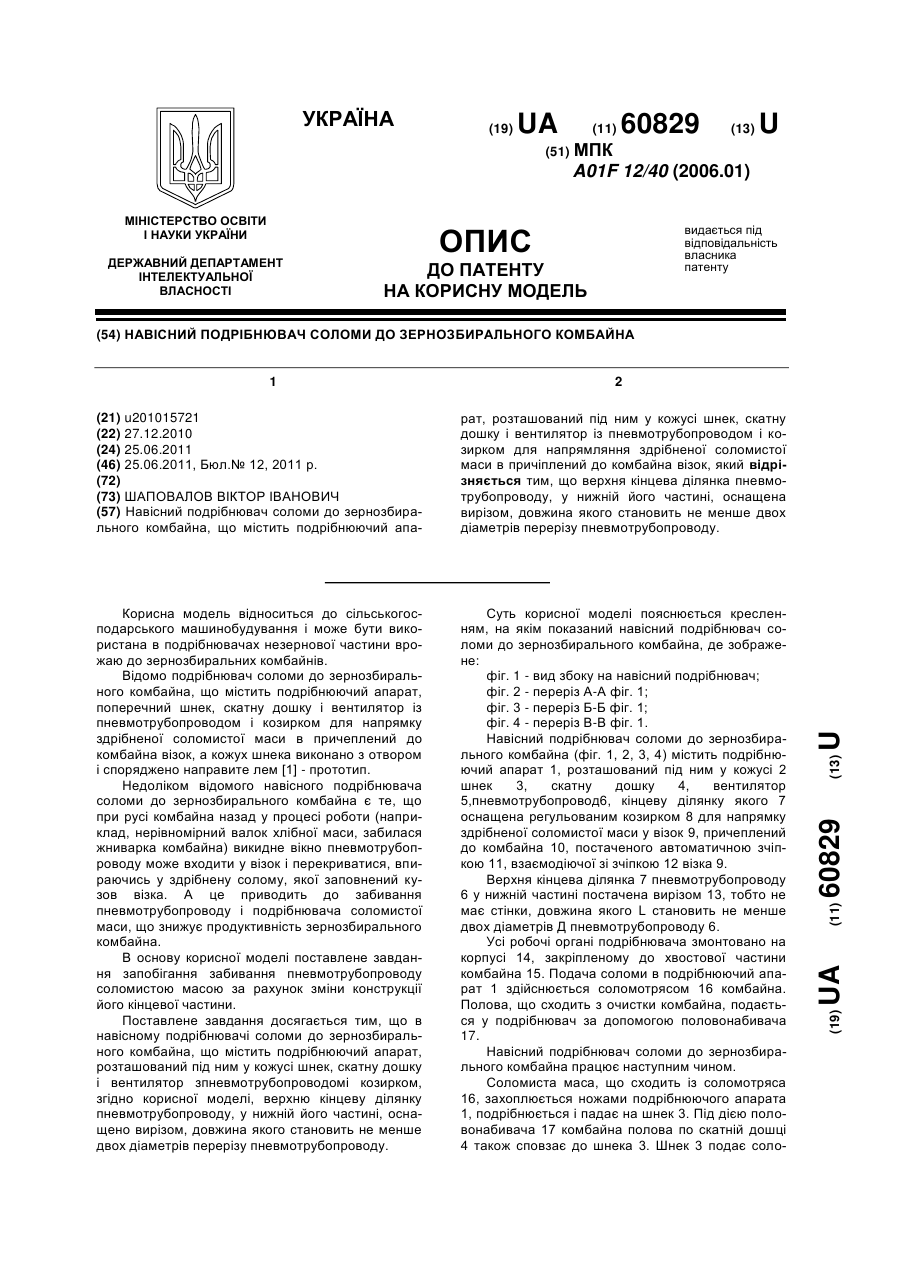
Номер патенту: 60829
Опубліковано: 25.06.2011
Автор: Шаповалов Віктор Іванович
МПК: A01F 12/40
Мітки: навісний, комбайна, соломи, подрібнювач, зернозбирального
Формула / Реферат:
Навісний подрібнювач соломи до зернозбирального комбайна, що містить подрібнюючий апарат, розташований під ним у кожусі шнек, скатну дошку і вентилятор із пневмотрубопроводом і козирком для напрямляння здрібненої соломистої маси в причіплений до комбайна візок, який відрізняється тим, що верхня кінцева ділянка пневмотрубопроводу, у нижній його частині, оснащена вирізом, довжина якого становить не менше двох діаметрів перерізу...
Попередній патент: Пристрій для моделювання сигналів, які передують сейсмічним явищам
Наступний патент: Огороджувальний сорбуючий бон для локалізації плям нафтопродуктів
Випадковий патент: Спосіб зниження опору руху рейкового транспортного засобу та зменшення зносу гребенів колісних пар