Електродинамічний вібратор
Формула / Реферат
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, джерело постійної напруги підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, форсуючий блок, перший, другий і третій суматори, підсилювач струму, перший і другий блоки диференціювання, перший, другий, третій і четвертий підсилювачі напруги, коло зворотного зв'язку, яке містить послідовно з'єднані датчик переміщення рухомої платформи з котушкою і блок зворотного зв'язку, вихід якого з'єднаний з другим входом другого суматора, вихід якого через підсилювач струму з'єднаний з обмоткою збудження рухомої котушки, а перший вхід другого суматора з'єднаний з виходом першого суматора, послідовно з'єднані перший і другий блоки диференціювання, вхід першого з яких з'єднаний з виходом датчика переміщення рухомої платформи безпосередньо, а через другий підсилювач напруги з'єднаний з першим входом третього суматора, другий вхід якого через третій підсилювач напруги з'єднаний з виходом першого блока диференціювання, третій вхід третього суматора з'єднаний через четвертий підсилювач напруги з виходом другого блока диференціювання, перший і другий аперіодичні блоки, перший блок ділення, перший і другий блоки множення, при цьому вихід задавального генератора через послідовно з'єднані форсуючий блок і перший блок ділення з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з виходом третього суматора безпосередньо, один вхід другого блока множення з'єднаний з виходом першого блока диференціювання, а другий вхід через послідовно з'єднані другий аперіодичний блок, перший підсилювач напруги, перший блок множення, перший і другий входи якого об'єднані, і перший аперіодичний блок з єднаний з виходом джерела постійної напруги , який відрізняється тим, що додатково містить п'ятий підсилювач напруги, третій аперіодичний блок, другий і третій блоки ділення, третій блок множення, четвертий суматор і джерело постійної напруги величиною «І», причому вихід першого блока диференціювання через послідовно з'єднані п'ятий підсилювач напруги і третій аперіодичний блок з'єднаний з другим входом четвертого суматора, перший вхід якого з'єднаний з виходом джерела постійної напруги величиною «І», а вихід четвертого суматора з'єднаний з об'єднаними першим і другим входами третього блока множення і входом «Подільник» другого блока ділення, вхід «Ділене» якого з'єднаний з виходом другого аперіодичного блока, а вихід - з входом «Подільник » першого блока ділення, вихід третього блока множення з'єднаний з входом «Подільник» третього блока ділення, вхід «Ділене» якого з'єднаний з виходом другого блока множення, а вихід третього блока ділення з'єднаний з третім входом першого суматора.
Текст
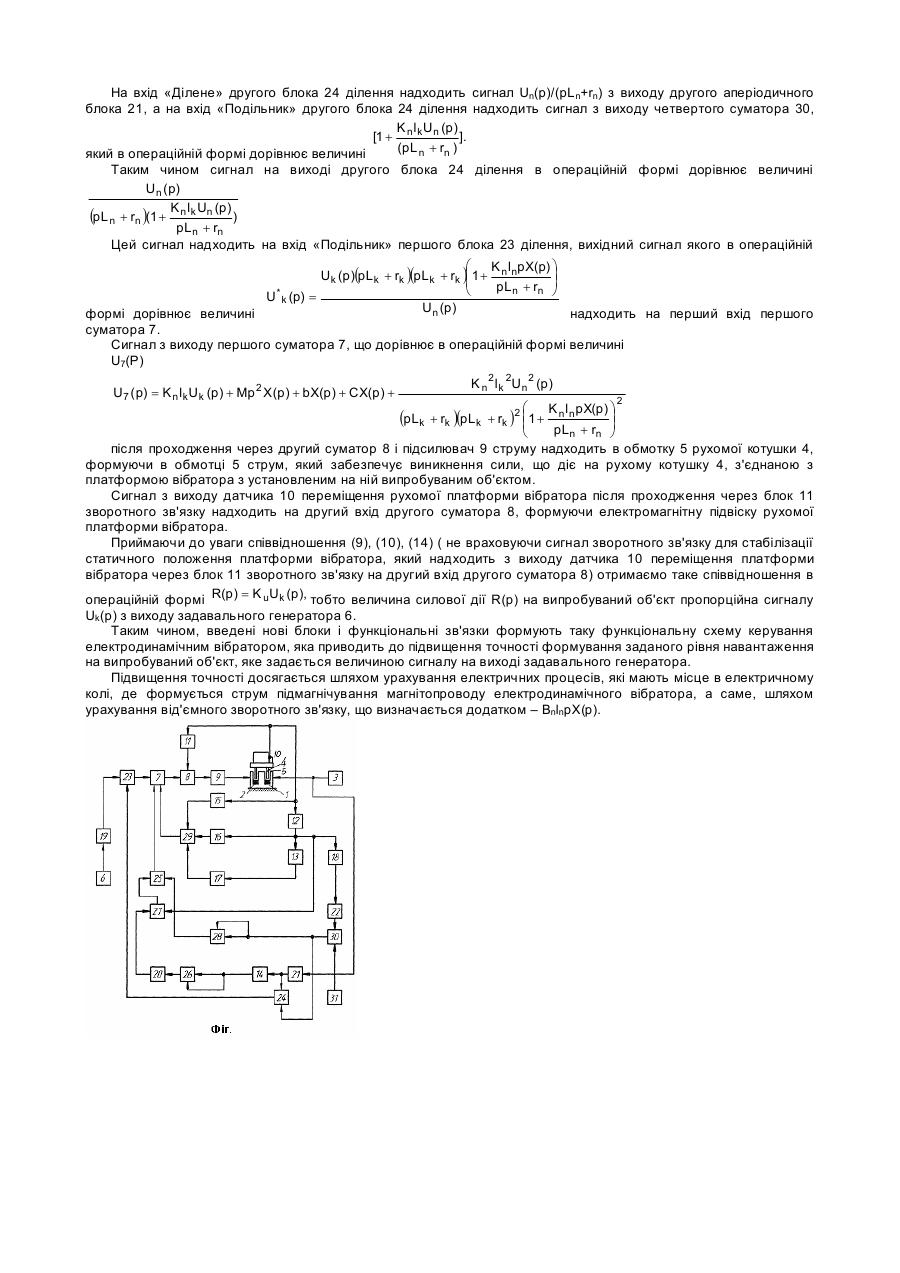
Винахід відноситься до області вібраційної техніки, а саме, до електродинамічних збуджувачів коливань і може знайти застосування як джерело механічних коливань в стендах для віброзбудження і моделювання різних типів вібраційних навантажень. Відомим є електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопровода рухому циліндричну котушку, довжина якої більше довжини повітряного зазору, задавальний генератор, вихід якого з'єднаний до обмотки рухомої котушки через послідовно з'єднані перший і другий суматори, і підсилювач струму, два послідовно з’єднаних блока диференціювання, виходи кожного з яких з'єднані з входами першого суматора, а також коло зворотного зв'язку, що містить послідовно з'єднані датчик переміщення циліндричної рухомої котушки вібратора і блок зворотного зв'язку, вихід якого з'єднаний з другим входом другого суматора, а вихід датчика переміщення рухомої котушки вібратора з'єднаний з входом першого блока диференціювання і з четвертим входом першого суматора (див. А.С. СРСР №623585, МПК В06В1/04, 1978). Недоліком відомого пристрою є недостатня точність формування заданого силового навантаження на випробуваний об'єкт, що пояснюється недостатньою точністю прийнятої математичної моделі електродинамічного вібратора, яка враховує тільки механічні процеси функціонування і не враховує електричні процеси, що відбуваються в обмотці рухомої котушки, що призводить до зменшення К.К.Д. Найбільш близьким по технічній суті і результатах, що отримуються, є електродинамічний вібратор, що містить магнітопровід з обмоткою намагнічування, установлену в повітряному зазорі магнітопровода рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, перший і другий суматори» підсилювач струму, перший і другий блоки диференціювання, коло зворотного зв'язку, що містить послідовно з'єднані датчик переміщення рухомої циліндричної котушки і блок зворотного зв'язку, вихід якого з'єднаний з другим входом другого суматора, вихід якого через підсилювач струму з'єднаний з рухомою циліндричною котушкою, вихід датчика переміщення рухомої котушки з'єднаний з входом першого блока диференціювання, вихід якого з'єднаний з входом другого блока диференціювання, перший, другий, третій, четвертий і п'ятий підсилювачі напруги, форсуючий блок, третій блок диференціювання і третій суматор, причому вихід задавального генератора через послідовно з'єднані перший підсилювач напруги і форсуючий блок з'єднаний з першим входом першого суматора, другий вхід якого через третій блок диференціювання з'єднаний з виходом третього суматора, перший вхід якого через другий підсилювач напруги з'єднаний з виходом датчика переміщення рухомої циліндричної котушки, другий вхід через третій підсилювач напруги з'єднаний з виходом першого блока диференціювання, а третій вхід через четвертий підсилювач напруги з'єднаний з виходом другого блока диференціювання, вихід датчика переміщення рухомої циліндричної котушки через п'ятий суматор з'єднаний з третім входом першого суматора. (див. деклараційний патент України на винахід №45161. МПК В06В1/04, 2001). Недоліком відомого пристрою є недостатня точність формування заданого силового навантаження на випробуваний об'єкт, що пояснюється недостатньою точністю прийнятої для формування алгоритму керування математичної моделі електродинамічного вібратора, яка враховує тільки механічні процеси його функціонування і електричні процеси в обмотці котушки збудження і не враховує всі електричні процеси з урахуванням зворотного зв'язку в обмотці котушки підмагнічування, що також призводить до зменшення К.К.Д. електродинамічного вібратора. В основу винаходу поставлене завдання створити такий електродинамічний вібратор, в якому за рахунок нової структурної схеми системи керування, що моделює процеси в механічній системі вібратора-коливання рухомої котушки і електричній системі вібратора - процеси в обмотках збудження і підмагнічування, підвищується точність формування заданого силового навантаження на випробуваний об'єкт, що призводить також до підвищення К.К.Д. електродинамічного вібратора. Поставлене завдання вирішується тим, що електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, джерело постійної напруги підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більше довжини повітряного зазору, задавальний генератор, форсуючий блок, перший, другий і третій суматори, підсилювач струму, перший і другий блоки диференціювання, перший, другий, третій і четвертий підсилювачі напруги, коло зворотного зв'язку, що містить послідовно з'єднані датчик переміщення рухомої платформи з котушкою і блок зворотного зв'язку, вихід якого з'єднаний з другим входом другого суматора, вихід якого через підсилювач струму з'єднаний з обмоткою збудження рухомої котушки, а перший вхід другого суматора з'єднаний з виходом першого суматора, послідовно з'єднані перший і другий блоки диференціювання, вхід першого з яких з'єднаний з виходом датчика переміщення рухомої платформи безпосередньо, а через другий підсилювач напруги з'єднаний з першим входом третього суматора, другий вхід якого через третій підсилювач напруги з'єднаний з виходом першого блока диференціювання, третій вхід третього суматора з'єднаний через четвертий підсилювач напруги з виходом другого блока диференціювання , перший і другий аперіодичні блоки, перший блок ділення, перший і другий блоки множення, при цьому вихід задавального генератора через послідовно з'єднані форсуючий блок і перший блок ділення з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з виходом третього суматора безпосередньо, один вхід другого блока множення з'єднаний з виходом першого блока диференціювання, а другий вхід через послідовно з'єднані другий аперіодичний блок, перший підсилювач напруги, перший блок множення, перший і другий входи якого об'єднані, і перший аперіодичний блок з'єднаний з виходом джерела постійної напруги, відповідно до винаходу, додатково містить п'ятий підсилювач напруги, третій аперіодичний блок, другий і третій блоки ділення, третій блок множення, четвертий суматор і джерело постійної напруги величиною «І», причому вихід першого блока диференціювання через послідовно з'єднані п'ятий підсилювач напруги і третій аперіодичний блок з'єднаний з другим входом четвертого суматора, перший вхід якого з'єднаний з виходом джерела постійної напруги величиною «І», а вихід четвертого суматора з'єднаний з об'єднаними першим і другим входами третього блока множення і входом «Подільник» другого блока ділення, вхід «Ділене» якого з'єднаний з виходом другого аперіодичного блока, а вихід - з входом «Подільник» першого блока ділення, вихід третього блока множення з'єднаний з входом «Подільник» третього блока ділення, вхід «Ділене» якого з'єднаний з виходом другого блока множення, а вихід третього блока ділення з'єднаний з третім входом першого суматора. Застосування запропонованого електродинамічного вібратора з усіма суттєвими ознаками, включаючи відмінні, дозволяє формувати задане силове навантаження на випробуваний об'єкт з більш високою точністю , тому що є можливість урахування не тільки механічних процесів коливань рухомої системи вібратора, електричних процесів в обмотці збудження рухомої котушки, але і всіх електричних процесів з урахуванням зворотного зв'язку в обмотці підмагнічування магнітопроводу, що сприяє збільшення К.К.Д. вібратора. Пояснюється це наступним. Розробка алгоритму формування заданого силового навантаження на випробуваний об'єкт при відтворенні вібрації базується на наступних міркуваннях. Механічне переміщення рухомої котушки збудження електродинамічного вібратора відповідає в операційній формі наступному диференційному рівнянню другого порядку, а саме: (1) (Mp 2 + bp + c) X(p) + R(p) = B n (p) l k Ik (p), де М - маса рухомої системи вібратора разом з випробуваним об'єктом, b - коефіцієнт демпфування; с - коефіцієнт жорсткості підвіски рухомої системи вібратора; Х(р) - операційне зображення переміщення рухомої системи вібратора; R(p) - операційне зображення сили реакції, що діє між випробуваним об'єктом і платформою вібратора, жорстко з'єднаною з рухомою котушкою; Bn(p) - операційне зображення магнітної індукції в повітряному зазорі магнітопровода, що формується при надходженні струму в обмотку підмагнічування вібратора; lk- довжина дроту обмотки котушки збудження; Ik(р)- операційне зображення струму, що протікає в обмотці рухомої котушки збудження вібратора; р = d/dt - оператор диференціювання. Електричні процеси в замкнутому колі обмотки рухомої котушки вібратора моделюється диференційним рівнянням першого порядку, що в операційній формі має вигляд: (2) (pL k + rk )Ik (p) = U k (p) Bn(p)l k X(p)p, де Lk - індуктивність обмотки рухомої котушки збудження; rk - опір обмотки рухомої котушки збудження; Uk(p) - операційне зображення напруги, що подається для живлення струмом обмотки збудження рухомої котушки. Електричні процеси в замкнутому колі обмотки котушки підмагнічування дня створення магнітної індукції в повітряному зазорі магнітопровода вібратора моделюються диференційним рівнянням першого порядку, що в операційній формі має вигляд: (3) (pL n + rn )l n (p) = U n (p) B n (p)l npX(p), де Ln - індуктивність обмотки котушки підмагнічування; rn - опір обмотки котушки підмагнічування; І n(р) - операційне зображення струму, що протікає в обмотці підмагнічування; Un(p)- операційне зображення напруги, що подається для живлення струмом In(р) обмотки підмагнічування; ln - довжина дроту обмотки підмагнічування. Застосуємо також закон Ома для магнітного кола в операційній формі: (4) I n (p ) Wn = B n (p)S m /G, де W n - число витків обмотки підмагнічування ; G - магнітна провідність повітряного зазору, де знаходиться обмотка рухомої котушки; Sm - площа поперечного перерізу магнітопроводу. Із (4) маємо співвідношення: (5) I n (p ) = B n (p ) /( Wn G / S m ) (6) або K nIn (p ) = B n (p ), де K n = GWn / S m. Із (3), (6) отримаємо таке співвідношення для Bn(р): K n U n (p ) B n (p ) = (pL n æ K l pX ( p ) ö ÷ + rn )ç 1 + n n ç pL n + r n ÷ è ø . (7) Із (2), (7) отримаємо співвідношення для визначення I n(р). Uk K n l k pXUn (p ) I n (p ) = (pL k + rk ) (8) ö æ (pLk + rk )ç 1 + K n ln pX(p) ÷ ç pL n + rn ÷ ø è Приймаючи до уваги (1), (7), (8), отримаємо рівняння для визначення сили R(p) реакції в операційній формі, що дорівнює заданому силовому навантаженню на випробуваний об'єкт: é ê ê K 2 l 2 U 2 (p ) n n n Mp 2 X(p ) + êb + 2 ê ÷ ç (pL k + rk )(pL k + rk )2 æ1 + K nlnpX(p) ö ê ç pL n + rn ÷ ê ø è ë ù ú ú K n l kUn (p )Uk (p ) . úpC(p ) + cX(p) + R(p ) = ö æ ú (pL k + rk )(pL k + rk )ç1 + K nl npX(p ) ÷ ú ç pL n + rn ÷ ø è ú û (9) Для формування співвідношення: (10) R(p ) = K u U k (p ), K u = K n l k необхідно розробити структурну схему, алгоритм функціонування якої відповідає співвідношенню (9), а саме, необхідно сформувати компенсаційну напругу для компенсації окремих додаткових сил в операційній формі 2 K 2 l 2 Un (p )pX(p ) n n Mp 2 X(p ), bX(p ), , cX(p ). 2 K n ln pX(p ) ö ÷ (pLk + rk )(pLk + rk ) ç1 + pL n + rn ÷ ø è При умові наявності компенсації цих сил маємо співвідношення: 2æ ç K nl n Un (p )UX k ( p ) R(p ) = (11) æ K l pX(p ) ö ÷ + rk )ç1 + n n ç pL n + rn ÷ ø è Для виконання умови (10) необхідно провести корекцію напруги Uk (р) з виходу задавального генератора, а саме сформувати U*k(р) у вигляді: (pL k + rk )(pLk (pL k * U k ( p) = U k (p ) æ K l pX( p) ö ÷ + rk )(pL k + r k )ç 1 + n n ç pL n + rn ÷ ø è U n ( p) (12) і замість Uk(p) у співвідношенні (11) необхідно застосувати U*k(р). Враховуючи (11) і (12) отримаємо співвідношення для визначення R(p) (13) R(p ) = K n l k U k (p ) = K nU k (p ) На кресленні приведена структурна схема електродинамічного вібратора. Електродинамічний вібратор містить магнітопровід 1 з обмоткою 2 підмагнічування , джерело 3 постійної напруги, установлену в повітряному зазорі магнітопровода 1 рухому циліндричну котушку 4 з обмоткою 5 збудження, задавальний генератор 6, перший і другий суматори 7,8 відповідно, підсилювач 9 струму, датчик 10 переміщення рухомої платформи разом з котушкою 4 і обмоткою 5 збудження, блок 11 зворотного зв'язку, перший і другий блоки 12, 13 диференціювання, перший, другий, третій, четвертий і п'ятий підсилювачі 14, 15, 16, 17,18 напруги відповідно, форсуючий блок 19, перший , другий і третій аперіодичні блоки 20, 21,22 відповідно перший, другий і третій блоки 23- 24- 25 ділення відповідно-перший, другий і третій блоки 26, 27, 28 множення відповідно, третій і четвертий суматори 29 і 30 відповідно, джерело 31 напруги величиною «І». Блоки і елементи електродинамічного вібратора з'єднані таким чином. Вихід задавального генератора б через послідовно з'єднані форсуючий блок 19 і перший блок 23 ділення з'єднаний з першим входом першого суматора 7, вихід якого через послідовно з'єднані другий суматор 8 і підсилювач 9 струму з'єднаний з обмоткою 5 збудження, що розташована на рухомій котушці 4 вібратора. На рухомій платформі (на схемі не позначена) вібратора розташований випробуваний об'єкт і датчик 10 переміщення рухомої платформи з котушкою збудження. Вихід датчика 10 переміщення рухомої платформи через блок 11 зворотного зв'язку з'єднаний з другим входом другого суматора 8, а через другий підсилювач 15 напруги - з першим входом третього суматора 29. Вихід датчика 10 переміщення через послідовно з'єднані перший і другий блоки 12, 13 диференціювання відповідно і четвертий підсилювач 17 напруги з'єднаний з третім входом третього суматора 29, другий вхід якого через третій підсилювач 16 напруги з'єднаний з виходом першого блока 12 диференціювання, а вихід третього суматора 29 з'єднаний з другим входом першого суматора 7, третій вхід першого суматора 7 з'єднаний з виходом третього блока 25 ділення, вхід «Ділене» якого з'єднаний з виходом другого блока 27 множення, один вхід якого з'єднаний з виходом першого блока 12 диференціювання, а другий вхід через послідовно з'єднані другий аперіодичний блок 21, перший підсилювач 14 напруги, перший блок 26 множення, другий вхід якого об'єднаний з першим входом, і перший аперіодичний блок 20 з'єднаний з виходом джерела 3 постійної напруги, що формує струм I n(р) підмагнічування. Вхід «Подільник» третього блока 25 ділення з'єднаний з виходом третього блока 28 множення, входи якого об'єднані і з'єднані з виходом четвертого суматора 30, один вхід якого з'єднаний з виходом джерела 31 постійної напруги величиною «І», а другий вхід через послідовно з’єднані п'ятий підсилювач 18 і третій аперіодичний блок 22 з'єднаний з виходом першого блока 12 диференціювання. Вхід «Ділене» другого блока 24 ділення з'єднаний з виходом другого аперіодичного блока 21, а вхід «Подільник» другого блока 24 ділення з'єднаний з виходом четвертого суматора 30. Вихід другого блока 24 ділення з'єднаний з входом «Подільник» першого блока 23 ділення. Електродинамічний вібратор функціонує таким чином. Живлення обмотки 5 збудження рухомої котушки відбувається за рахунок струму з виходу підсилювача 9 струму. Рухома котушка разом з обмоткою 5 збудження, платформою вібратора і випробуваним об'єктом переміщується за рахунок дії електромагнітної сили, що пропорційна величині струму на виході підсилювача 9 струму. Механічне переміщення рухомої платформи відбувається по закону, що відповідає співвідношенню (1), електричні процеси в замкненому колі обмотки 5 збудження відповідають співвідношенню (2), електричні процеси в замкненому колі обмотки підмагнічування відповідають співвідношенням (3), (4),(5) (7). Коло зворотного зв'язку, що містить датчик 10 переміщення рухомої платформи разом з котушкою, обмоткою 5 збудження, випробуваним об'єктом і блок 11 зворотного зв'язку, вводиться для створення електромагнітної підвіски платформи з коефіцієнтом жорсткості «с». Для реалізації співвідношення (10) формується структурна схема, алгоритм функціонування якої відповідає співвідношенню (9). Така структурна схема має вигляд, що відповідає зображеному на фігурі. На виході задавального генератора 6 формується сигнал, що в операційній формі дорівнює Uk(p), Сигнал Uk(p) через форсуючий блок 19, передатна функція якого дорівнює (р Lk + rk), надходить на вхід «Ділене» першого блока 23 ділення, на вхід «Подільник» якого надходить сигнал Un(p) з виходу другого блока 24 ділення, на вхід «Ділене» якого надходить сигнал з виходу другого аперіодичного блока 21, передатна функція якого дорівнює (р Ln + rn)-1, а на вхід «Подільник» - сигнал з виходу четвертого суматора 30. Сигнал з виходу першого блока 23 ділення надходить на перший вхід першого суматора 7 На другий вхід першого суматора 7 надходить сигнал з виходу третього суматора 29. а на третій вхід - сигнал з виходу третього блока 25 ділення. Сигнал Х(р) з виходу датчика 10 переміщення рухомої платформи після проходження через послідовно з'єднані перший і другий блоки 12 і 13 диференціювання і четвертий підсилювач 17 напруги з передатною функцією, що дорівнює «M», у вигляді Мр2Х(р) надходить на третій вхід третього суматора 29. На другий вхід третього суматора 29 надходить сигнал рХ(р) з виходу першого блоку 12 диференціювання після проходження через третій підсилювач 16, передатна функція якого дорівнює «b». Цей сигнал дорівнює величині bрХ(р). На перший вхід третього суматора 29 надходить сигнал з виходу датчика 10 переміщення рухомої платформи після проходження через другий підсилювач 15 напруги, передатна функція якого дорівнює «С». Цей сигнал дорівнює величині СХ(р). Сигнал U3(р) в операційній формі на виході третього суматора 29 дорівнює в величині U3(р)=Mр2Х(p)+bрX(p)+СХ(р). Сигнал Un(p) в операційній формі з виходу джерела 3 постійної напруги надходить на вхід другого аперіодичного блока 21, передатна Функція якого дорівнює величині (pLn+rn)-1. Після проходження через другий Un (p ) (pL n + rn ) надходить на об'єднані входи першого підсилювача 14 з коефіцієнтом аперіодичний блок 21 сигнал підсилення Кnlk на вхід «Ділене» другого блока 24 ділення. Сигнал K n l k Un (p ) /( pL n + rn ) в операційній формі з виходу першого підсилювача 14 напруги надходить на об'єднані входи першого блока 26 множення, сигнал в операційній формі на виході якого дорівнює величині: [K n l k Un (p) /(pLn + rn )] 2 . Сигнал з виходу першого блока 26 множення після проходження через перший -1 аперіодичний блок 20, передатна функція якого дорівнює величині (pL k + rk ) , надходить на другий вхід другого блока 27 множення. Цей сигнал в операційній формі дорівнює величині: [ K n l k U n ( p ) /( pL n + r n )] 2 /( pL k + r k ). На другий вхід другого блока 27 множення надходить сигнал рХ(р) з виходу першого блока 12 диференціювання. 2 Сигнал величини pX(p)[K n l k Un ( p) /(pLn + rn )] /(pL k + rk ) в операційній формі з виходу другого блока 27 множення надходить на вхід «Ділене» третього блока 25 ділення, на вхід «Подільник» якого надходить сигнал з виходу третього блока 28 множення, який формується таким чином. Сигнал Х(р) в операційній формі з виходу першого блока 12 диференціювання надходить на вхід п'ятого підсилювача 18 напруги з коефіцієнтом підсилення Кnln , сигнал КnlnХ(р) з виходу якого надходить на вхід третього -1 аперіодичного блока 22, передатна функція якого дорівнює величині (pL k + rk ) , а сигнал на виході якого в операційній формі дорівнює величині K n l k Un (p ) /( pL n + rn ) . Цей сигнал надходить на другий вхід четвертого суматора 30, на перший вхід якого надходить сигнал величини «1» з виходу джерела 31 постійної напруги 31, що формує постійний струм для живлення обмотки підмагнічування. Сигнал в операційній формі на виході четвертого суматора 30 дорівнює величині: K n l k Un (p ) 1+ . (pL n + rn ) Цей сигнал надходить на об'єднані входи третього блока 28 множення і вхід «Подільник» другого блока 24 ділення. K l U (p ) [1 + n k n ] 2 . (pL n + rn ) Сигнал в операційній формі величини з виходу третього блока 28 множення надходить на вхід «Подільник» третього блока 25 ділення, сигнал в операційній формі на виході якого дорівнює величині ì K l U (p) ü pX(p)[K n l k Un ( p) /( pLn + rn )] 2 / í(pLk + rk )[1 + n k n ] 2 ý (pLn + rn ) þ i надходить на третій вхід першого суматора 7. На î другий вхід першого суматора 7 надходить сигнал, що в операційній формі дорівнює величині Mp 2 X(p ) + bX(p ) + CX(p ). На перший вхід першого суматора 7 надходить сигнал з виходу першого блока 23 ділення, який формується наступним чином. Сигнал Uk(p) в операційній формі з виходу задавального генератора 6 через форсуючий блок 19, передатна функція якого дорівнює величині (pL k + rk ) , надходить на вхід «Ділене» першого блока 23 ділення, на вхід «Подільник» якого надходить сигнал з виходу другого блока 24 ділення-який формується таким чином. На вхід «Ділене» другого блока 24 ділення надходить сигнал Un(p)/(pLn+rn) з виходу другого аперіодичного блока 21, а на вхід «Подільник» другого блока 24 ділення надходить сигнал з виходу четвертого суматора 30, K l U (p ) [1 + n k n ]. (pL n + rn ) який в операційній формі дорівнює величині Таким чином сигнал на виході другого блока 24 ділення в операційній формі дорівнює величині Un ( p) (pL n + rn )(1 + K n l k Un (p) ) pL n + rn Цей сигнал надходить на вхід «Подільник» першого блока 23 ділення, вихідний сигнал якого в операційній æ K l pX(p) ö ÷ U k (p )(pL k + rk )(pL k + rk )ç 1 + n n ç pL n + rn ÷ ø è U * k (p) = U n (p ) надходить на перший вхід першого формі дорівнює величині суматора 7. Сигнал з виходу першого суматора 7, що дорівнює в операційній формі величині U7(P) U7 ( p) = K n l k Uk (p ) + Mp 2 X(p ) + bX(p ) + CX(p ) + K n 2 l k 2Un 2 (p ) 2 æ K l pX(p ) ö ÷ + rk )2 ç 1 + n n ç pL n + rn ÷ ø è після проходження через другий суматор 8 і підсилювач 9 струму надходить в обмотку 5 рухомої котушки 4, формуючи в обмотці 5 струм, який забезпечує виникнення сили, що діє на рухому котушку 4, з'єднаною з платформою вібратора з установленим на ній випробуваним об'єктом. Сигнал з виходу датчика 10 переміщення рухомої платформи вібратора після проходження через блок 11 зворотного зв'язку надходить на другий вхід другого суматора 8, формуючи електромагнітну підвіску рухомої платформи вібратора. Приймаючи до уваги співвідношення (9), (10), (14) ( не враховуючи сигнал зворотного зв'язку для стабілізації статичного положення платформи вібратора, який надходить з виходу датчика 10 переміщення платформи вібратора через блок 11 зворотного зв'язку на другий вхід другого суматора 8) отримаємо таке співвідношення в операційній формі R(p ) = K uU k (p ), тобто величина силової дії R(p) на випробуваний об'єкт пропорційна сигналу (pLk + rk )(pLk Uk(p) з виходу задавального генератора 6. Таким чином, введені нові блоки і функціональні зв'язки формують таку функціональну схему керування електродинамічним вібратором, яка приводить до підвищення точності формування заданого рівня навантаження на випробуваний об'єкт, яке задається величиною сигналу на виході задавального генератора. Підвищення точності досягається шляхом урахування електричних процесів, які мають місце в електричному колі, де формується струм підмагнічування магнітопроводу електродинамічного вібратора, а саме, шляхом урахування від'ємного зворотного зв'язку, що визначається додатком – ВnlnрХ(р).
ДивитисяДодаткова інформація
Назва патенту англійськоюElectrodynamic vibrator
Автори англійськоюPuz'ko Ihor Danylovych
Назва патенту російськоюЭлектродинамический вибратор
Автори російськоюПузько Игорь Данилович
МПК / Мітки
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Код посилання
<a href="https://ua.patents.su/5-70115-elektrodinamichnijj-vibrator.html" target="_blank" rel="follow" title="База патентів України">Електродинамічний вібратор</a>
Електродинамічний вібратор

Номер патенту: 60648
Опубліковано: 15.10.2003
Автор: Пузько Ігор Данилович
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, форсуючий блок, перший, другий і третій суматори, підсилювач струму, перший і другий блоки диференціювання, коло зворотного зв'язку, яке має послідовно сполучені датчик переміщення рухомої платформи з котушкою і блок...
Електродинамічний вібратор
Номер патенту: 40446
Опубліковано: 16.07.2001
Автори: Павловський Михайло Антонович, Хворост Володимир Андрійович, Пузько Ігор Данилович
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної котушки, перший і другий суматори, коло зворотного зв'язку, що складається з послідовно з'єднаних датчика положення рухомої котушки і блока...
Електродинамічний вібратор

Номер патенту: 45161
Опубліковано: 15.03.2002
Автори: Пузько Ігор Данилович, Хворост Володимир Андрійович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, перший і другий суматори, підсилювач струму, перший і другий блоки диференціювання, коло зворотного зв'язку, що містить послідовно сполучені датчик переміщення рухомої циліндричної котушки і блок зворотного зв'язку,...
Електродинамічний вібратор
Номер патенту: 44517
Опубліковано: 15.02.2002
Автори: Пузько Ігор Данилович, Хворост Володимир Андрійович
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більше довжини повітряного зазору, яка жорстко з'єднана з платформою вібратора з випробуваним об'єктом, задавальний генератор, вихід якого під'єднаний до входу другого суматора через перший суматор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної...
Електродинамічний вібратор
Номер патенту: 37999
Опубліковано: 15.05.2001
Автори: Хворост Володимир Андрійович, Павловський Михайло Антонович, Пузько Ігор Данилович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Текст:
...R(p) на випробуваний об'єкт, а саме: 1) сформувати сигнал Х2, операційним зображенням якого є постійного струму, рухому циліндричну котушку 4 з платформою (на кресленні не позначена) та випробуваним об'єктом 5, закріпленим на платформі, задавальний генератор 6, перший суматор 7, другий суматор 8, підсилювач 9 струму, да тчик 10 положення рухомої котушки, блок 11 зворотного зв'язку, підсилювач 12 з регульованим коефіцієнтом підсилення, блок...
Попередній патент: Вібраційна щокова дробарка
Наступний патент: Спосіб одержання фероалюмінію
Випадковий патент: Вішалка для одягу