Пристрій вимірювання малих кутів місця цілей в радіолокації
Номер патенту: 71768
Опубліковано: 15.12.2004
Автори: Бондаренко Борис Федорович, Тимчук Володимир Юрійович

Формула / Реферат
1. Пристрій вимірювання малих кутів місця цілей в радіолокації, що включає в себе антену у вигляді цифрової антенної решітки, блоки генерування можливих значень кута місця маловисотної цілі, формування на їх основі набору значень оціночного вектора фазових розподілів вихідного сигналу ЦАР; формування перенастроюваного одновимірного матричного фільтра-проектора, обчислення квадратичної форми вихідного сигналу і його порівнювання з заданим порогом для пошуку максимального значення квадратичної форми та блок видачі оцінки кута місця цілі, який відрізняється тим, що вектор сигналів, представлений у цифровому вигляді, множиться на перенастроювану двовимірну передаточну функцію матричного фільтра-проектора, що пов`язує подальшу обробку сигналів з наявністю на вході антени сигналів від цілі та її антипода, і результат перемноження перетворюється в квадратичну форму, за якою у процесі перенастроювання матричного фільтра-проектора визначається максимальне значення квадратичної форми, що перевищує встановлений поріг, і на основі якого видається оцінка кута місця маловисотної цілі.
2. Пристрій за п.1, який відрізняється тим, що прийняті приймальною антеною радіолокаційної станції сигнали надходять на набір неперенастроюваних матричних фільтрів-проекторів, що перекривають можливий діапазон значень малих кутів місця цілі.
Текст
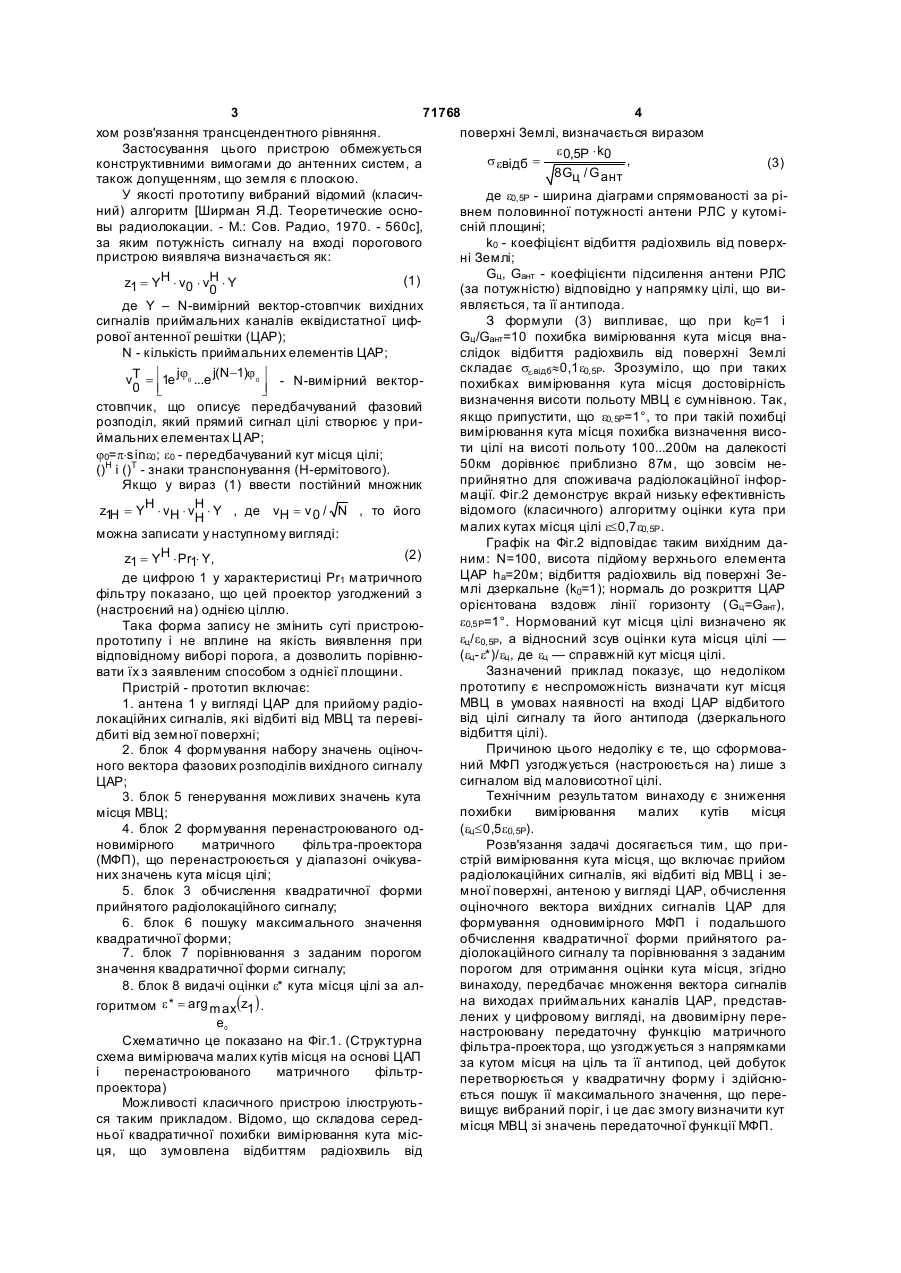
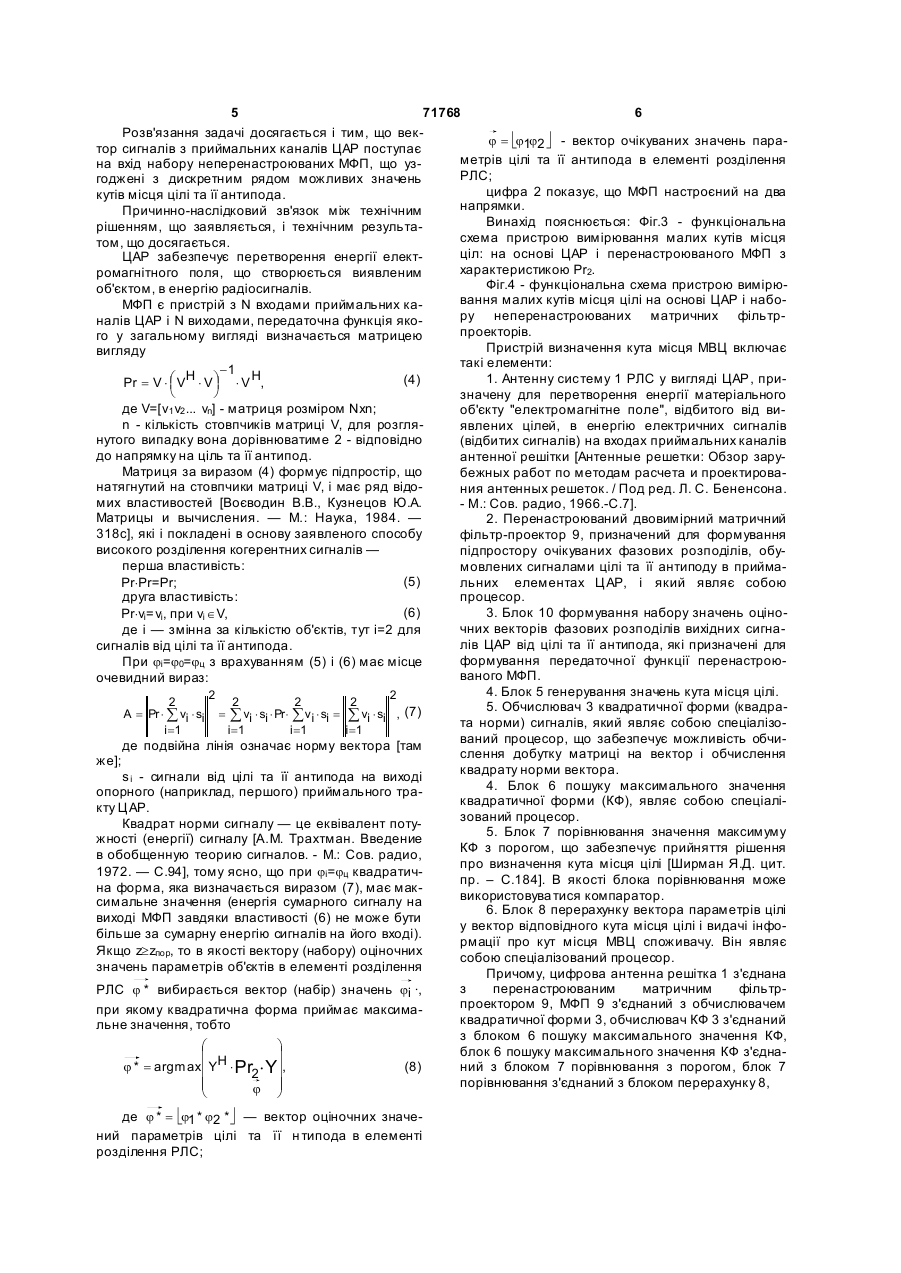
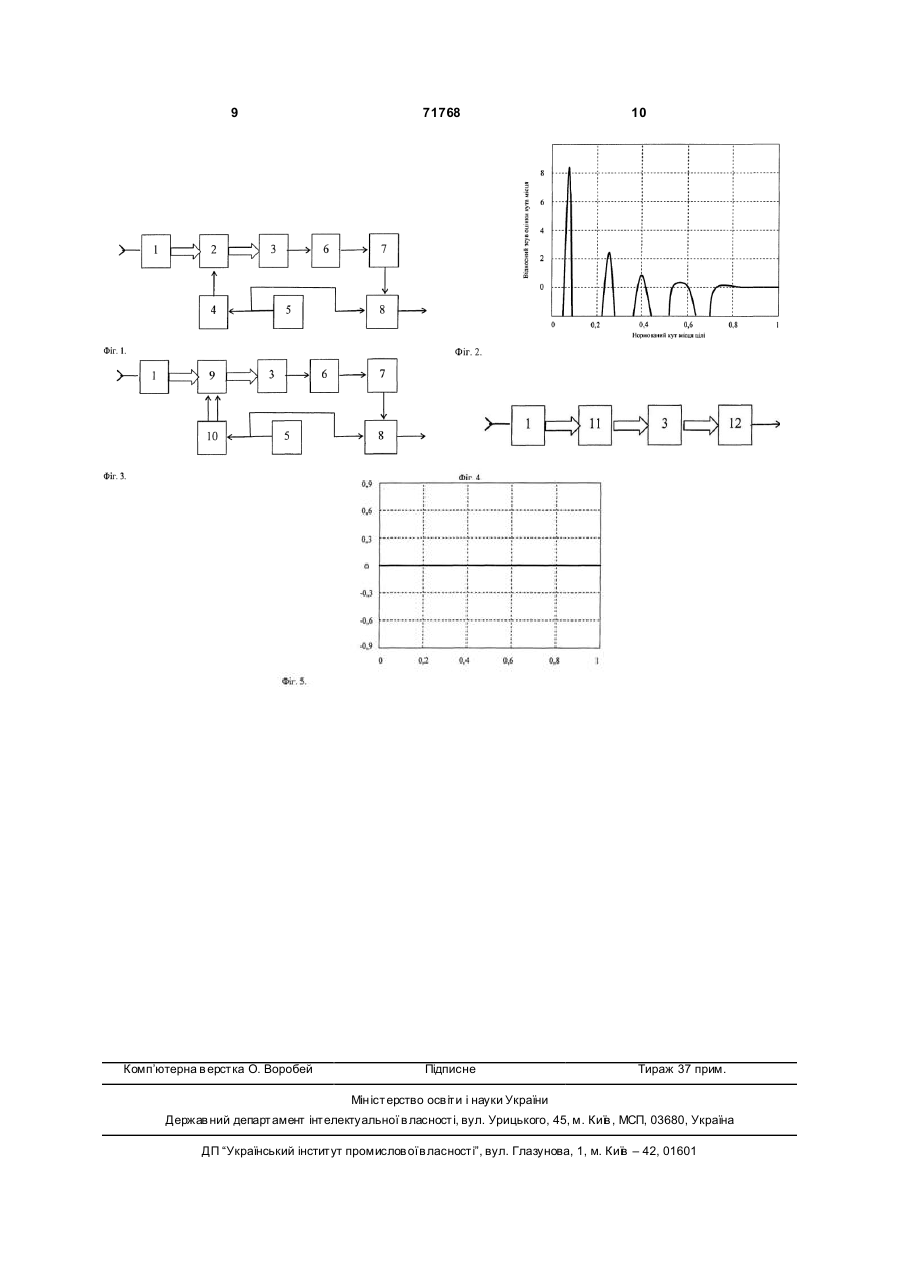
1. Пристрій вимірювання малих кутів місця цілей в радіолокації, що включає в себе антену у вигляді цифрової антенної решітки, блоки генерування можливих значень кута місця маловисотної цілі, формування на їх основі набору значень оціночного вектора фазових розподілів вихідного сигналу ЦАР; формування перенастроюваного одновимірного матричного фільтра-проектора, обчислення квадратичної форми вихідного сигналу і його порівнювання з заданим порогом для пошуку максимального значення квадратичної 3 71768 4 хом розв'язання трансцендентного рівняння. поверхні Землі, визначається виразом Застосування цього пристрою обмежується e 0,5Р × k0 s eвідб = , (3) конструктивними вимогами до антенних систем, а 8 Gц / G ант також допущенням, що земля є плоскою. У якості прототипу вибраний відомий (класичде e0,5Р - ширина діаграми спрямованості за ріний) алгоритм [Ширман Я.Д. Теоретические основнем половинної потужності антени РЛС у кутомівы радиолокации. - М.: Сов. Радио, 1970. - 560с], сній площині; за яким потужність сигналу на вході порогового k0 - коефіцієнт відбиття радіохвиль від поверхпристрою виявляча визначається як: ні Землі; Gц , Gант - коефіцієнти підсилення антени РЛС (1) z1 = YH × v0 × vH × Y (за потужністю) відповідно у напрямку цілі, що ви0 являється, та її антипода. де Υ – N-вимірний вектор-стовпчик вихідних сигналів приймальних каналів еквідистатної цифЗ формули (3) випливає, що при k0=1 і рової антенної решітки (ЦАР); Gц /Gант=10 похибка вимірювання кута місця внаN - кількість приймальних елементів ЦАР; слідок відбиття радіохвиль від поверхні Землі складає se.відб»0,1e0,5Р. Зрозуміло, що при таких T = ê1e jj0 ...e j(N-1)j 0 ú - N-вимірний векторv похибках вимірювання кута місця достовірність ú 0 ê ë û визначення висоти польоту МВЦ є сумнівною. Так, стовпчик, що описує передбачуваний фазовий якщо припустити, що e0,5Р=1°, то при такій похибці розподіл, який прямий сигнал цілі створює у привимірювання кута місця похибка визначення висоймальних елементах ЦАР; ти цілі на висоті польоту 100...200м на далекості j0=p×sine0 ; e0 - передбачуваний кут місця цілі; H T 50км дорівнює приблизно 87м, що зовсім не() і () - знаки транспонування (Н-ермітового). прийнятно для споживача радіолокаційної інфорЯкщо у вираз (1) ввести постійний множник мації. Фіг.2 демонструє вкрай низьку ефективність відомого (класичного) алгоритму оцінки кута при z1 = YH × vH × vH × Y , де vH = v 0 / N , то його H H малих кутах місця цілі e£0,7e0,5Р . можна записати у наступному вигляді: Графік на Фіг.2 відповідає таким вихідним да(2) z1 = YH × Pr1× Y, ним: N=100, висота підйому верхнього елемента ЦАР ha=20м; відбиття радіохвиль від поверхні Зеде цифрою 1 у характеристиці Рr1 матричного млі дзеркальне (k0=1); нормаль до розкриття ЦАР фільтру показано, що цей проектор узгоджений з орієнтована вздовж лінії горизонту (Gц =Gант), (настроєний на) однією ціллю. e0,5Р=1°. Нормований кут місця цілі визначено як Така форма запису не змінить суті пристроюeц /e0,5Р, а відносний зсув оцінки кута місця цілі — прототипу і не вплине на якість виявлення при (eц -e*)/eц , де eц — справжній кут місця цілі. відповідному виборі порога, а дозволить порівнюЗазначений приклад показує, що недоліком вати їх з заявленим способом з однієї площини. прототипу є неспроможність визначати кут місця Пристрій - прототип включає: МВЦ в умовах наявності на вході ЦАР відбитого 1. антена 1 у вигляді ЦАР для прийому радіовід цілі сигналу та його антипода (дзеркального локаційних сигналів, які відбиті від МВЦ та перевівідбиття цілі). дбиті від земної поверхні; Причиною цього недоліку є те, що сформова2. блок 4 формування набору значень оціночний МФП узгоджується (настроюється на) лише з ного вектора фазових розподілів вихідного сигналу сигналом від маловисотної цілі. ЦАР; Технічним результатом винаходу є зниження 3. блок 5 генерування можливих значень кута похибки вимірювання малих кутів місця місця МВЦ; 4. блок 2 формування перенастроюваного од(eц £0,5e0,5Р). новимірного матричного фільтра-проектора Розв'язання задачі досягається тим, що при(МФП), що перенастроюється у діапазоні очікувастрій вимірювання кута місця, що включає прийом них значень кута місця цілі; радіолокаційних сигналів, які відбиті від МВЦ і зе5. блок 3 обчислення квадратичної форми мної поверхні, антеною у вигляді ЦАР, обчислення прийнятого радіолокаційного сигналу; оціночного вектора вихідних сигналів ЦАР для 6. блок 6 пошуку максимального значення формування одновимірного МФП і подальшого квадратичної форми; обчислення квадратичної форми прийнятого ра7. блок 7 порівнювання з заданим порогом діолокаційного сигналу та порівнювання з заданим значення квадратичної форми сигналу; порогом для отримання оцінки кута місця, згідно винаходу, передбачає множення вектора сигналів 8. блок 8 видачі оцінки e* кута місця цілі за ална виходах приймальних каналів ЦАР, представe * = arg max(z1) . горитмом лених у цифровому вигляді, на двовимірну переe0 настроювану передаточну функцію матричного Схематично це показано на Фіг.1. (Структурна фільтра-проектора, що узгоджується з напрямками схема вимірювача малих кутів місця на основі ЦАП за кутом місця на ціль та її антипод, цей добуток і перенастроюваного матричного фільтрперетворюється у квадратичну форму і здійснюпроектора) ється пошук її максимального значення, що переМожливості класичного пристрою ілюструютьвищує вибраний поріг, і це дає змогу визначити кут ся таким прикладом. Відомо, що складова середмісця МВЦ зі значень передаточної функції МФП. ньої квадратичної похибки вимірювання кута місця, що зумовлена відбиттям радіохвиль від 5 71768 6 Розв'язання задачі досягається і тим, що векj = ëj1j2 û - вектор очікуваних значень паратор сигналів з приймальних каналів ЦАР поступає метрів цілі та її антипода в елементі розділення на вхід набору неперенастроюваних МФП, що узРЛС; годжені з дискретним рядом можливих значень цифра 2 показує, що МФП настроєний на два кутів місця цілі та її антипода. напрямки. Причинно-наслідковий зв'язок між технічним Винахід пояснюється: Фіг.3 - функціональна рішенням, що заявляється, і технічним результасхема пристрою вимірювання малих кутів місця том, що досягається. ціл: на основі ЦАР і перенастроюваного МФП з ЦАР забезпечує перетворення енергії електхарактеристикою Рr2. ромагнітного поля, що створюється виявленим Фіг.4 - функціональна схема пристрою вимірюоб'єктом, в енергію радіосигналів. вання малих кутів місця цілі на основі ЦАР і набоМФП є пристрій з N входами приймальних кару неперенастроюваних матричних фільтрналів ЦАР і N виходами, передаточна функція якопроекторів. го у загальному вигляді визначається матрицею Пристрій визначення кута місця МВЦ включає вигляду такі елементи: -1 H H 1. Антенну систему 1 РЛС у вигляді ЦАР, при(4) Pr = V × æ V × V ö × V , ç ÷ è ø значену для перетворення енергії матеріального де V=[v1 v2 ... vn] - матриця розміром Nxn; об'єкту "електромагнітне поле", відбитого від виn - кількість стовпчиків матриці V, для розгляявлених цілей, в енергію електричних сигналів нутого випадку вона дорівнюватиме 2 - відповідно (відбитих сигналів) на входах приймальних каналів до напрямку на ціль та її антипод. антенної решітки [Антенные решетки: Обзор заруМатриця за виразом (4) формує підпростір, що бежных работ по методам расчета и проектированатягнутий на стовпчики матриці V, і має ряд відония антенных решеток. / Под ред. Л. С. Бененсона. мих властивостей [Воєводин В.В., Кузнецов Ю.А. - М.: Сов. радио, 1966.-С.7]. Матрицы и вычисления. — Μ.: Наука, 1984. — 2. Перенастроюваний двовимірний матричний 318с], які і покладені в основу заявленого способу фільтр-проектор 9, призначений для формування високого розділення когерентних сигналів — підпростору очікуваних фазових розподілів, обуперша властивість: мовлених сигналами цілі та її антиподу в прийма(5) Рr×Рr=Рr; льних елементах ЦАР, і який являє собою друга властивість: процесор. (6) 3. Блок 10 формування набору значень оціноPr×vi=vi, при vi ÎV, чних векторів фазових розподілів вихідних сигнаде і — змінна за кількістю об'єктів, тут i=2 для лів ЦАР від цілі та її антипода, які призначені для сигналів від цілі та її антипода. формування передаточної функції перенастроюПри ji=j0=jц з врахуванням (5) і (6) має місце ваного МФП. очевидний вираз: 4. Блок 5 генерування значень кута місця цілі. 2 2 2 2 2 2 5. Обчислювач 3 квадратичної форми (квадраA = Pr × å vi × si = å vi × si × Pr × å v i × si = å vi × si , (7) та норми) сигналів, який являє собою спеціалізоi =1 i =1 i =1 i =1 ваний процесор, що забезпечує можливість обчиде подвійна лінія означає норму вектора [там слення добутку матриці на вектор і обчислення же]; квадрату норми вектора. s i - сигнали від цілі та її антипода на виході 4. Блок 6 пошуку максимального значення опорного (наприклад, першого) приймального траквадратичної форми (КФ), являє собою спеціалікту ЦАР. зований процесор. Квадрат норми сигналу — це еквівалент поту5. Блок 7 порівнювання значення максимуму жності (енергії) сигналу [А.М. Трахтман. Введение КФ з порогом, що забезпечує прийняття рішення в обобщенную теорию сигналов. - Μ.: Сов. радио, про визначення кута місця цілі [Ширман Я.Д. цит. 1972. — С.94], тому ясно, що при ji=jц квадратичпр. – С.184]. В якості блока порівнювання може на форма, яка визначається виразом(7), має маквикористовува тися компаратор. симальне значення (енергія сумарного сигналу на 6. Блок 8 перерахунку вектора параметрів цілі виході МФП завдяки властивості (6) не може бути у вектор відповідного кута місця цілі і видачі інфобільше за сумарну енергію сигналів на його вході). рмації про кут місця МВЦ споживачу. Він являє Якщо z³zпор, то в якості вектору (набору) оціночних собою спеціалізований процесор. значень параметрів об'єктів в елементі розділення Причому, цифрова антенна решітка 1 з'єднана з перенастроюваним матричним фільтрРЛС j * вибирається вектор (набір) значень ji ·, проектором 9, МФП 9 з'єднаний з обчислювачем при якому квадратична форма приймає максимаквадратичної форми 3, обчислювач КФ 3 з'єднаний льне значення, тобто з блоком 6 пошуку максимального значення КФ, æ ö блок 6 пошуку максимального значення КФ з'єднаç H ÷ j * = argmaxç Y × Pr2× Y÷, (8) ний з блоком 7 порівнювання з порогом, блок 7 ç ÷ порівнювання з'єднаний з блоком перерахунку 8, ç j ÷ è ø де j * = ëj1 * j2 *û — вектор оціночних значений параметрів цілі та її н типода в елементі розділення РЛС; 7 71768 8 блок 5 генерування значень кута місця цілі зв'язав якості оцінки кута місця цілі приймається те його ний з входами формувача 10 оціночних векторів і з значення, на яке настроєний НФП цього каналу: інформаційним входом блока перерахунку 8, форі=argmax(zk), kÎ 1, n , де i — номер каналу, на вимувач 10 векторів з'єднаний з перенастроюваним ході якого КФ має найбільше значення. МФП 9. Кількість НФП у схемі на Фіг.4 визначається У випадку використання набору неперенаствиразом n³De/Dдискр, де De — діапазон вимірюваних роюваних фільтрів-проєкторів (НФП) вихідний сигкутів місця; Dдискр — дискретність настроювання нал антени після його перетворення у цифровий НФП за кутом місця. Для забезпечення вимог до код поступає на вхід НФП 11, поступає на обчисточності вимірювання куту місця цілі параметр лювач 3 КФ і далі на блок 12 оцінки кута місця, що Dдискр має задовольняти умові функціонує так само як і блоки 6, 7 і 8. Причому, багатоканальним зв'язком вихід ан2 ö D дискр £ 2 3æ s2 ç e необ - seмет ÷, тени 1 РЛС з'єднаний з входом набору НФП 11, їх è ø виходи з'єднані з входом обчислювача З КФ, а виходи обчислювача З КФ зв'язані з входами блоде s 2необ — необхідне значення дисперсії e ку 12 оцінки кута місця. похибки вимірювання куту місця цілі при заданому Пристрій визначення кута місця МВЦ працює таким чином. значенні відношення сигнал/шум; s 2мет — знаe Створювані об'єктами електромагнітні поля чення дисперсії в реальних умовах. перетворюються у приймальних елементах ЦАР в Для ілюстрації дієздатності винаходу на Фіг.5 електричні сигнали. Після підсилення і перетвонаведена залежність відносного зсуву оцінки від рення у цифровий код ці сигнали поступають на відносного значення кута місця цілі. Вихідні дані входи МФП, в якому здійснюється помноження для Фіг.5 такі ж як і для Фіг.1. його передаточної функції вигляду 1-й варіант побудови вимірювача (Фіг.3) доці-1 льно використовувати у випадках роботи РЛС в æ VH × V ö × VH , (9) Pr2 = V × ç ÷ пасивному режимі і для вимірювання кута місця за è ø квазибезперервним сигналом, що випромінюється ціллю. Прикладом такої ситуації є випадок виміДе V = êv0v* ú — матриця розміром Nх2; 0ú ê ë û рювання кута місця джерела активної завади. 2-й варіант побудови вимірювача (Фіг.4) доціv * v0 — вимірний вектор-стовпчик, що описує 0 льно використовувати при вимірюванні кута місця передбачуваний фазовий розподіл, який антипод при роботі РЛС в штатному імпульсному режимі за цілі створює в приймальних елементах ЦАР (через сигналом, що відбивається від цілі. знані особливості перевідбитого сигналу vц =va*, Суттєвими ознаками винаходу є те, що матриіндекс „а" говорить про антипод), на вектор вихідчний фільтр-проектор, що лежить в основі фільтних сигналів цифрової антенної решітки. рації і обробки сигналів, формується таким чином, З ви ходу МФП сигнали поступають на обчисщо одночасно настроюється на прямий сигнал від лювач КФ, де вираховується квадратична форма цілі та її антипод, що дозволяє численними методля вихідного сигналу фільтра-проектора: дами віднайти максимальне значення квадратичH × Pr × Y. (10) ної форми добутку вектора сигналів з виходів приz2 = Y 2 ймальних каналів цифрової антенної решітки у З його виходу обчислювача КФ сигнал постуцифровому вигляді на перенастроювану передапає на блок порівнювання з порогом, який забезточну функцію матричного фільтра-проектора (або печує численний розв'язок задачі пошуку безумовна передаточну функцію кожного неперенастроюного екстремуму. ваного матричного фільтра-проектора), яке дасть Блок 5 генерування значень кута місця цілі генайвірогіднішу оцінку кута місця маловисотної цілі нерує можливі їх значення і подає їх на формувач при перевищенні значення квадратичної форми векторів ν0, ν0*, які забезпечують перестроювання заданого порогу виявлення. МФП. При перевищенні значення КФ порогу виявОтже, запропонований пристрій вимірювання лення з генеровані значення кута місця цілі викомалих кутів місця цілі практично реалізується, має ристовуються в якості оцінки кута місця цілі: суттєві ознаки, долає притаманні прототипу та e * = arg max (z 2 ) іншим відомим аналогам недоліки чи спрощує (11) e0 конструктивне виконання РЛС і забезпечує виміУ тому випадку, коли використовується набір рювання кутів місця маловисотних цілей з прийня11 не перенастроюваних МФП для знаходження тною для споживачів точністю за рахунок виклюнайбільшого значення квадратична форма добутку чення зсуву оцінки, що зумовлений наявністю (при передаточних функцій цих НФП на вектор вихідних вимірювання малих кутів місця) в приймальних сигналів ЦАР, робота пристрою не відрізняється каналах ЦАР перевідбитого від Землі сигналу. від описаної вище, за винятком того, що у блоці 12 9 Комп’ютерна в ерстка О. Воробей 71768 Підписне 10 Тираж 37 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring low elevations of a target in radiolocation
Назва патенту російськоюУстройство для измерения малых углов места цели в радиолокации
МПК / Мітки
МПК: G01S 17/06
Мітки: малих, пристрій, цілей, радіолокації, вимірювання, місця, кутів
Код посилання
<a href="https://ua.patents.su/5-71768-pristrijj-vimiryuvannya-malikh-kutiv-miscya-cilejj-v-radiolokaci.html" target="_blank" rel="follow" title="База патентів України">Пристрій вимірювання малих кутів місця цілей в радіолокації</a>
Наземний радіолокаційний вимірювач кутів місця повітряних цілей
Номер патенту: 40793
Опубліковано: 15.08.2001
Автори: Бахвалов Валентин Борисович, Голованов Валерій Павлович, Михайленко Володимир Прокопович, Зюкін Володимир Федорович, Гризо Андрій Аркадійович
МПК: G01S 13/00, G01S 13/06
Мітки: вимірювач, кутів, радіолокаційний, цілей, наземний, повітряних, місця
Формула / Реферат:
Наземний радіолокаційний вимірювач кутів місця повітряних цілей, що містить приймально-передавальну антену з антенним перемикачем "прийом-передача", імпульсний передавач і приймач, який відрізняється тим, що зі складу пристрою виключений механізм гойдання антени по куту місця і додатково включені компенсаційна антенна решітка із рознесених по висоті елементів, кореляційний автокомпенсатор і перемикач періодичного послідовного...
Пристрій для вимірювання величини кутів, пов’язаних з колом
Номер патенту: 61634
Опубліковано: 17.11.2003
Автори: Омельчук Прокіп Кирилович, Юрчук Марія Володимирівна, Юрчук Володимир Петрович, Яблонський Петро Миколайович
МПК: G01B 5/24
Мітки: вимірювання, величини, пов'язаних, кутів, колом, пристрій
Формула / Реферат:
Пристрій для вимірювання величини кутів, пов'язаних з колом, виконаний у вигляді базового елемента, на якому розміщений лімб з подвійною шкалою, який відрізняється тим, що на кожній із шкал закріплені з можливістю переміщення дві напрямні, що є сторонами кута, на перетині яких розміщено другий рухомий лімб для визначення вимірюваного кута.
Пристрій для вимірювання кутів у геодезичних приладах
Номер патенту: 30130
Опубліковано: 15.11.2000
Автори: Пасько Ігор Матвійович, Голік Марат Миколайович, Гринюк Ігор Євгенович
МПК: G01C 1/00
Мітки: геодезичних, кутів, приладах, вимірювання, пристрій
Формула / Реферат:
Пристрій для вимірювання кутів у геодезичних приладах, що містить оптично зв'язаний лімб, шкалу, інтервал між штрихами якої відповідає цілому числу кутових хвилин повороту лімбу, мікроскоп, блок передачі на шкалу зображення штрихів лімбу зі збільшенням, яке дає можливість розміщення між зображенням двох штрихів лімбу цілого числа інтервалів між штрихами шкали, який відрізняється тим, що на частині кожного інтервалу між штрихами лімбу нанесено...
Пристрій для вимірювання малих переміщень
Номер патенту: 34292
Опубліковано: 15.02.2001
Автори: Палагін Олександр Юрійович, Кравченко Олександр Васильйович, Коломоєць Вікторія Вікторівна, Привалов Володимир Миколайович, Соколовський Іван Івановіч, Загуральський Микола Федорович
МПК: G01P 3/00, G01S 13/00
Мітки: малих, пристрій, вимірювання, переміщень
Текст:
...винахідницьку задачу, не була виявлена. Отже, винахід, що пропонується, відповідає критерію "новизна". Суть винаходу не витікає для фахівця явним чином з відомого рівня техніки. Сукупність ознак, що характеризують відомий пристрій, не забезпечує досягнення нових властивостей і тільки наявність відмітних ознак дозволяє отримати новий технічний результат. Отже, винахід, що пропонується, відповідає критерію "винахідницький рівень". В...
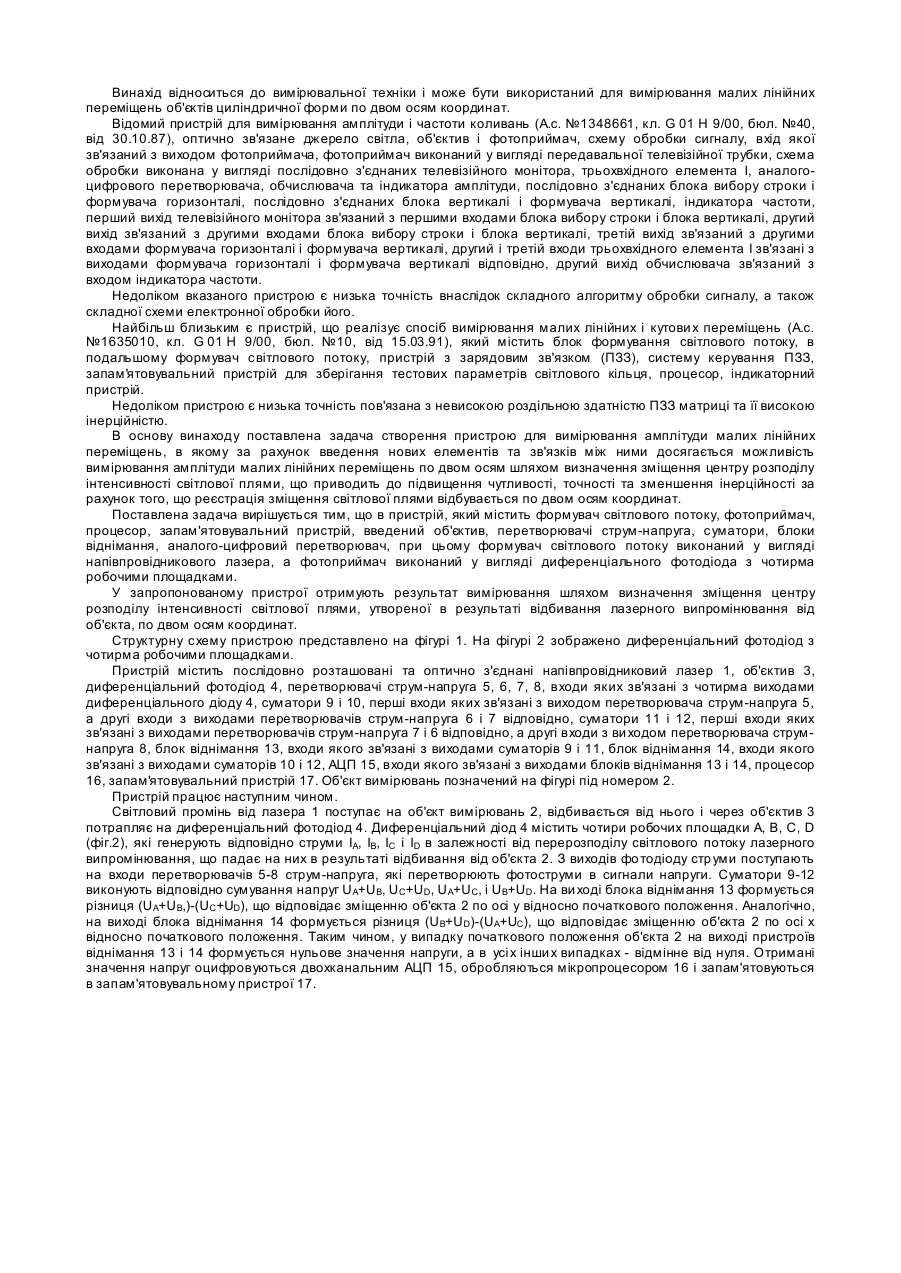
Пристрій для вимірювання амплітуди малих лінійних переміщень
Номер патенту: 68904
Опубліковано: 16.08.2004
Автори: Кухарчук Василь Васильович, Білинський Йосип Йосипович, Білинська Марина Йосипівна
МПК: G01B 9/00, G01B 21/00, G01H 9/00, G01B 11/08
Мітки: вимірювання, переміщень, малих, амплітуди, лінійних, пристрій
Формула / Реферат:
Пристрій для вимірювання амплітуди малих лінійних переміщень, що містить формувач світлового потоку, фотоприймач, процесор, запам'ятовуючий пристрій, який відрізняється тим, що в нього введений об'єктив, вхід якого зв'язаний з виходом формувача світлового потоку, а вихід з фотоприймачем, чотири перетворювачі струм-напруга, входи яких зв'язані з чотирма виходами фотоприймача, чотири суматори, в яких перші входи першого та другого суматорів...
Попередній патент: Пристрій для отримання синтез-газу із газогідратних покладів
Наступний патент: Спосіб боротьби з ґрунтовими шкідниками картоплі
Випадковий патент: Спосіб виготовлення дисків-оригіналів для тиражування компакт-дисків