Наземний радіолокаційний вимірювач кутів місця повітряних цілей
Номер патенту: 40793
Опубліковано: 15.08.2001
Автори: Михайленко Володимир Прокопович, Гризо Андрій Аркадійович, Голованов Валерій Павлович, Зюкін Володимир Федорович, Бахвалов Валентин Борисович

Формула / Реферат
Наземний радіолокаційний вимірювач кутів місця повітряних цілей, що містить приймально-передавальну антену з антенним перемикачем "прийом-передача", імпульсний передавач і приймач, який відрізняється тим, що зі складу пристрою виключений механізм гойдання антени по куту місця і додатково включені компенсаційна антенна решітка із рознесених по висоті елементів, кореляційний автокомпенсатор і перемикач періодичного послідовного підключення елементів решітки до компенсаційного входу автокомпенсатора, причому основний вхід автокомпенсатора зв'язаній з антенним перемикачем "прийом-передача", а вихід - із приймачем, на виході якого додатково встановлений обчислювач кута місця цілі за співвідношенням:
де ε - кут місця цілі;
h - висота підйому над землею нижнього елемента компенсаційної антенної решітки;
d - відстань по висоті між сусідніми елементами компенсаційної антенної репгітки;
n - номер елемента компенсаційної антенної решітки, при підключенні якого на виході приймача з'являється сигнал цілі;
λ - довжина хвилі.
Текст
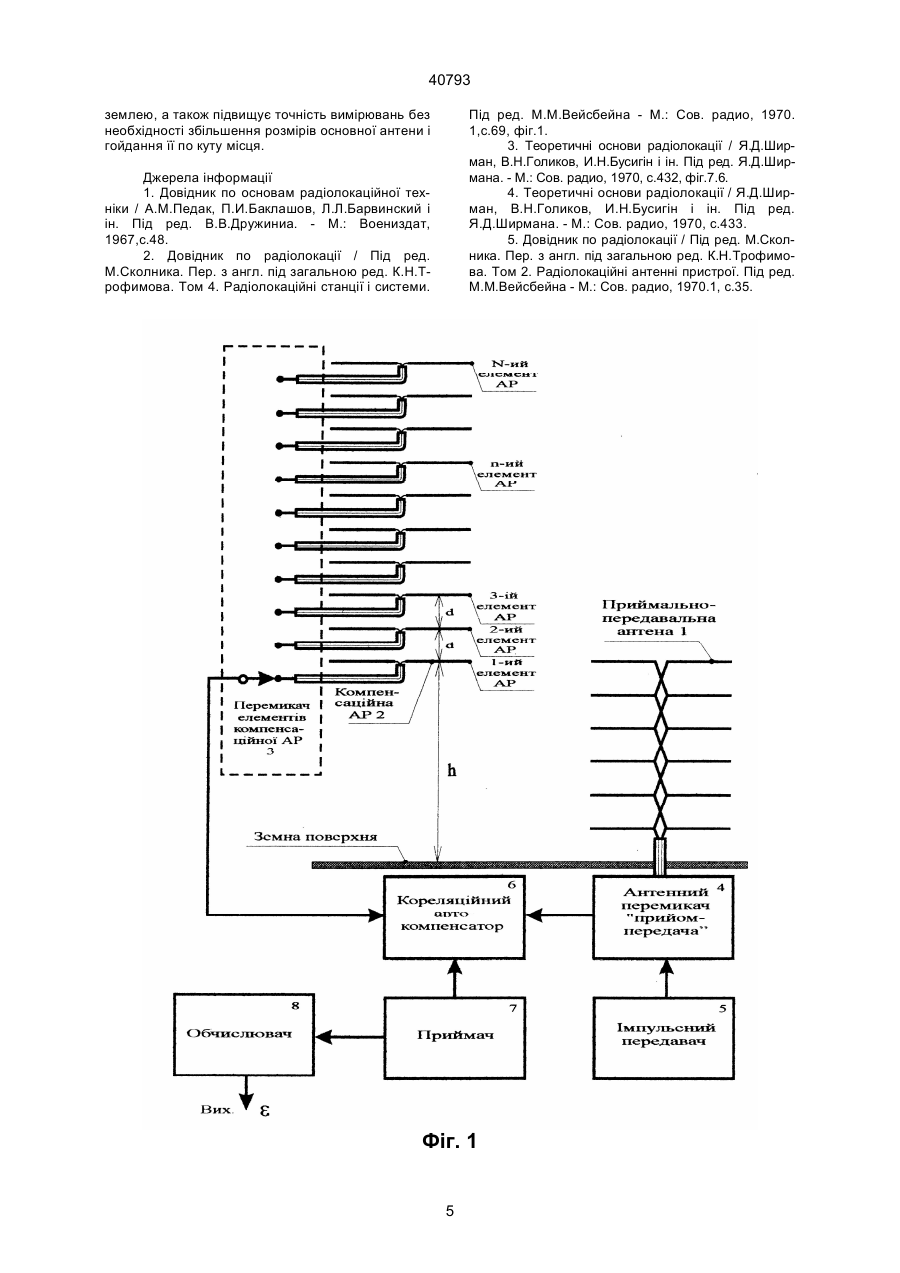
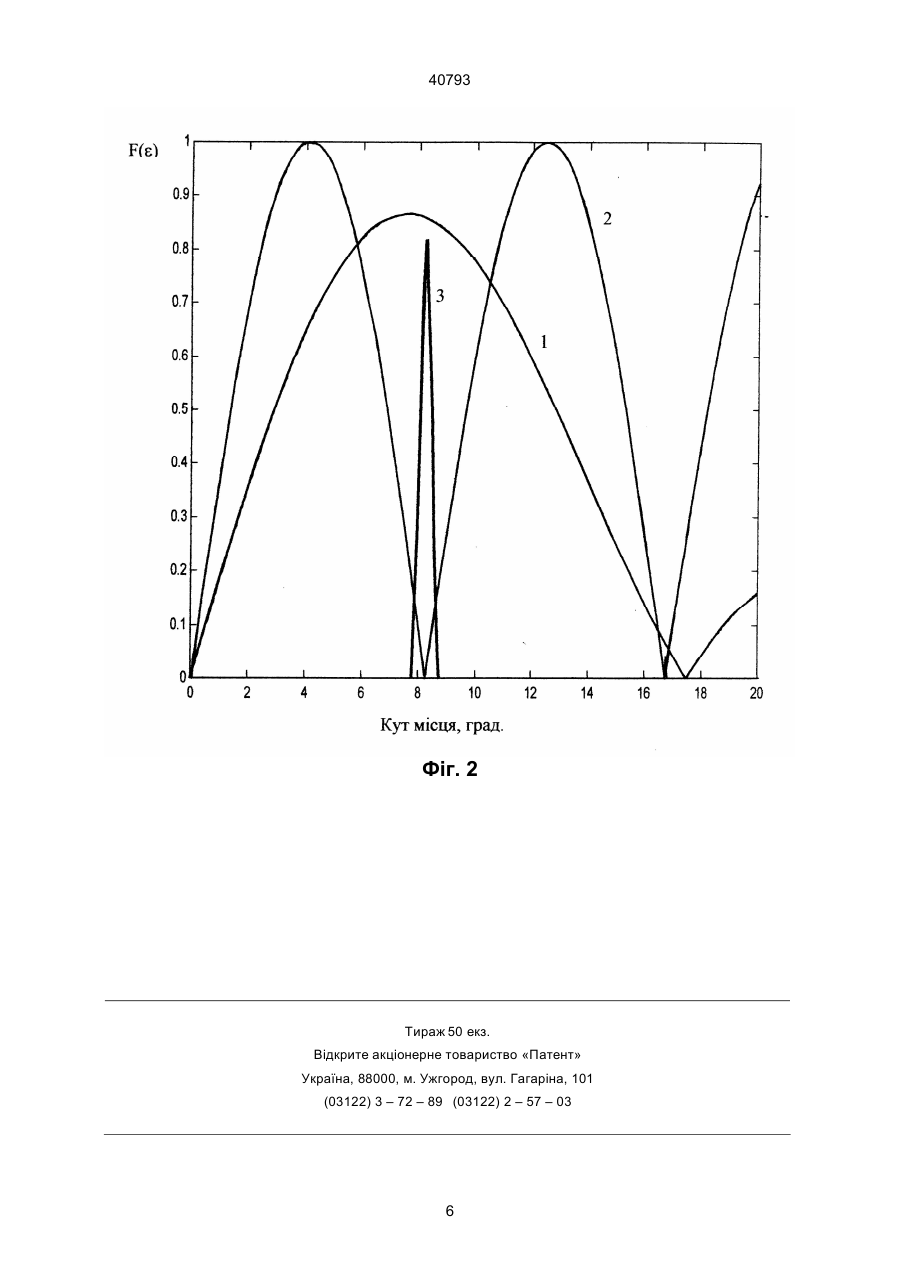
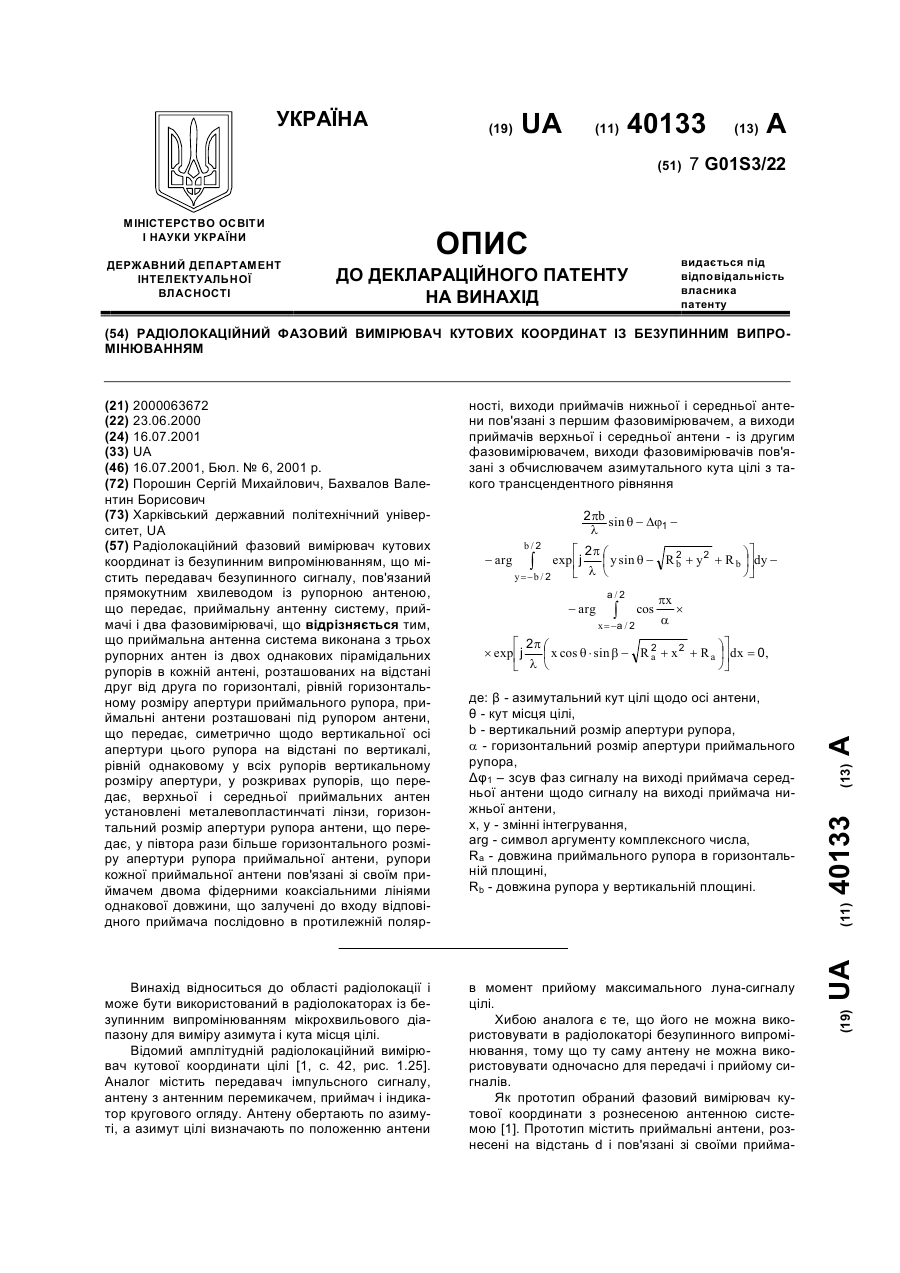
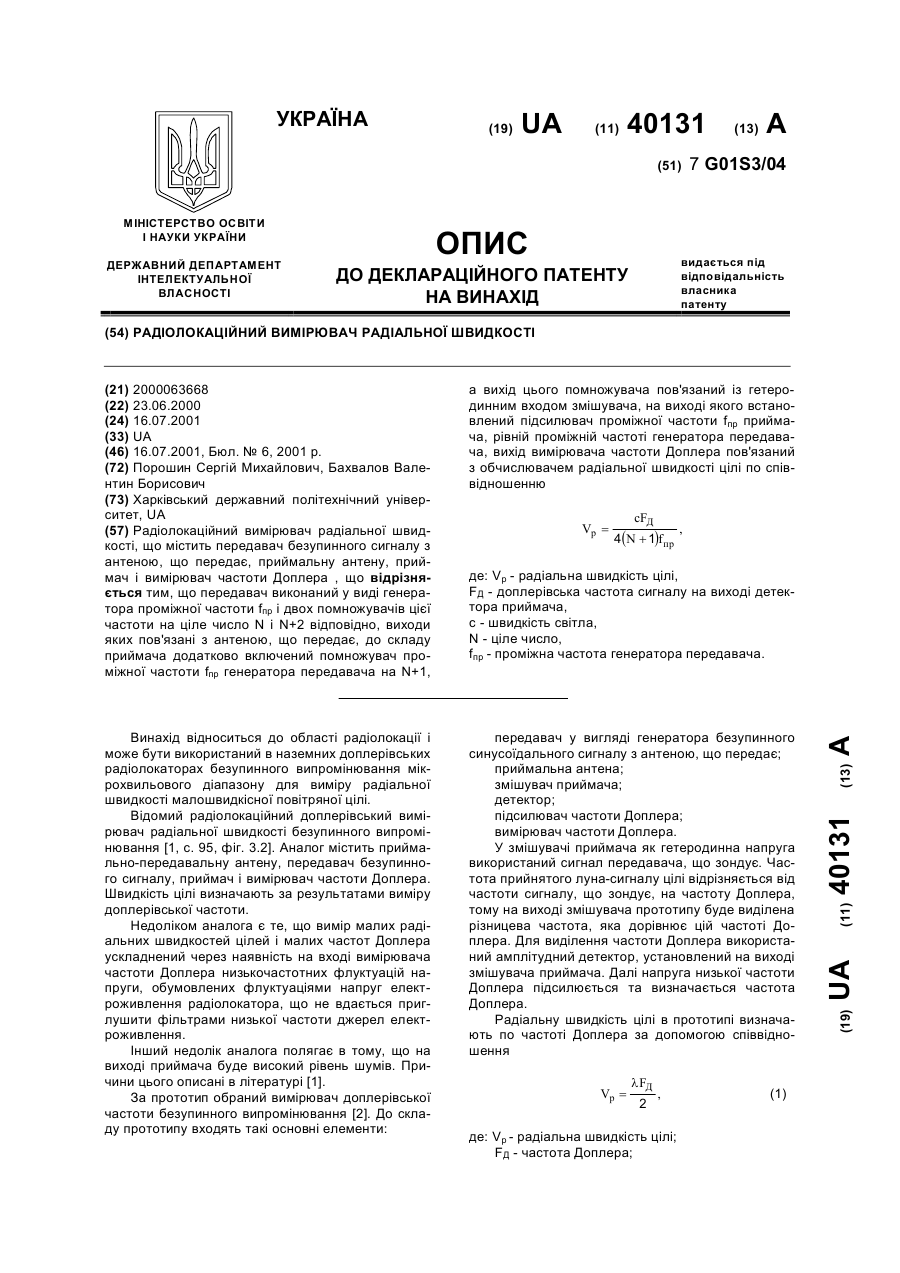
Наземний радіолокаційний вимірювач кутів місця повітряних цілей, що містить приймальнопередавальну антену з антенним перемикачем "прийом-передача", імпульсний передавач і приймач, який відрізняється тим, що зі складу пристрою виключений механізм гойдання антени по куту місця і додатково включені компенсаційна антенна решітка із рознесених по висоті елементів, кореляційний автокомпенсатор і перемикач періодичного послідовного підключення елементів решітки до компенсаційного входу автокомпенсатора, причому основний вхід автокомпенсатора зв'язаний з антенним перемикачем "прийомпередача", а вихід - із приймачем, на виході якого додатково встановлений обчислювач кута місця цілі за співвідношенням: (19) (21) 2000031418 (22) 10.03.2000 (24) 15.08.2001 (46) 15.08.2001, Бюл. № 7, 2001 р. (72) Бахвалов Валентин Борисович, Зюкін Володимир Федорович, Михайленко Володимир Прокопович, Гризо Андрій Аркадійович, Голованов Валерій Павлович (73) ХАРКІВСЬКИЙ ВІЙСЬКОВИЙ УНІВЕРСИТЕТ 40793 Запропонований пристрій із вузькою пеленгаціонною характеристикою забезпечує вимірювання кутів місця повітряних цілей в усьому робочому секторі, включаючи малі кути місця над землею, а також підвищує точність вимірювань. При цьому гойдати антену по куту місця не потрібно, що дозволяє виключити зі складу пристрою механізм гойдання антени. Технічна сутність і принцип дії запропонованого пристрою пояснюються на фіг.1, 2. На фіг.1 надана спрощена структурна схема запропонованого наземного радіолокаційного вимірювача кутів місця, а також показана антенна система і її розташування над землею. На фіг.2 надані розрахункові діаграми направленості приймально-передавальної антени і компенсаційної АР з урахуванням впливу землі, а також пеленгаційна характеристика по куту місця для n-го елемента АР. До складу запропонованого пристрою входять слідуючі основні елементи: приймально-передавальна антена 1; компенсаційна антенна решітка 2; перемикач 3 елементів компенсаційної АР; антенний перемикач "прийом-передача" 4; імпульсний передавач 5 зондуючих сигналів високої частоти; кореляційний автокомпенсатор 6; приймач 7; обчислювач 8 кута місця цілі e за співвідношенням (1). Нижче пояснюється принцип дії запропонованого пристрою й з'ясовуються його істотні відмітні ознаки. Рішення поставленої задачі (забезпечення можливості виміру кутів місця повітряної цілі в секторі малих кутів місця над землею і підвищення точності вимірювань) досягнуто в запропонованому пристрої на основі використання компенсаційної АР із N рознесених по висоті елементів і кореляційного АК. Основний канал АК підключений до основної приймально-передавальної антени 1, а компенсаційна АР працює тільки на прийом. Елементи компенсаційної АР періодично підключаються до компенсаційного входу АК за допомогою перемикача 3. При наявності ехо-сигналу цілі в основному і компенсаційному каналах автокомпенсатор 6 заглушає сигнал і на виході приймача 7 сигнал буде відсутній. У випадках, коли ехо-сигнал цілі є присутнім в основному каналі прийому і відсутній у компенсаційному каналі, автокомпенсатор не буде пригнічувати сигнал, і він пройде на вихід приймача 7. Сигнал у компенсаційному каналі АК буде відсутній в області інтерференційного провалу ДН поточного елемента компенсаційної АР, а ці провали для різних елементів АР зміщені по куту місця, тому що висоти підйому елементів над землею різні. Запропоноване технічне рішення дозволяє одержати вузьку пеленгаційну характеристику по сигналу на виході АК і за рахунок цього підвищити точність вимірювання кута місця цілі. Ширину пеленгаційних характеристик для різних елементів АР можна підібрати таким чином, щоб сукупність таких характеристик перекривала весь кутомісний сектор основної антени РЛС, включаючи малі кути місця. рах антени погрішність виміру кута місця буде великою і може досягати половини кутомісної ширини діаграми направленості антени. В основу винаходу поставлена задача створити наземний радіолокаційний вимірювач кутів місця повітряних цілей, який шляхом введення додаткової компенсаційної антенної решітки (АР) із рознесених по висоті елементів, кореляційного автокомпенсатора (АК) і перемикача послідовного підключення цих елементів до компенсаційного входу автокомпенсатора забезпечить можливість виміру кутів місця повітряних цілей в секторі малих кутів місця над землею і підвищить точність вимірювання без необхідності збільшення розмірів основної антени і гойдання її по куту місця. Поставлена задача вирішується тим,що в наземному радіолокаційному вимірювачі кутів місця повітряних цілей, що містить приймально-передавальну антену з антенним перемикачем "прийом-передача", імпульсний передавач і приймач, додатково включені компенсаційна антенна решітка із рознесених по висоті елементів, кореляційний автокомпенсатор і перемикач періодичного послідовного підключення елементів цієї решітки до компенсаційного входу автокомпенсатора. Основний вхід автокомпенсатора зв'язаний з антенним перемикачем "прийом-передача" основної приймально-передавальної антени, а вихід - із приймачем. Пристрій гойдання антени по куту місця, що був у прототипі, зі складу запропонованого пристрою виключено. На виході приймача додатково встановлений обчислювач кута місця цілі за співвідношенням : l e = arcsin , (1) 2 × [h + d(n - 1)] де e - кут місця цілі; h - висота підйому над землею нижнього елемента компенсаційної антенної решітки; d - відстань по висоті між сусідніми елементами компенсаційної антенної решітки; n - номер елемента компенсаційної антенної решітки, при підключенні якого на виході приймача з'являється сигнал цілі; l - довжина хвилі. Використання в запропонованому пристрої кореляційного автокомпенсатора дозволяє заглушити ехо-сигнали цілей при всіх кутах місця, за винятком дуже вузького сектора поблизу інтерференційного провалу діаграми направленості поточного підключеного елемента компенсаційної антенної решітки. У цьому секторі автокомпенсатор не буде заглушати сигнал основного каналу прийому через відсутність сигналу в компенсаційному каналі. Положення інтерференційного провалу періодично стрибкоподібнo змінюють шляхом підключення елементів антенної решітки до компенсаційного входу АК. Це дозволяє одержати вузьку пеленгаційну характеристику вимірювача і періодично змінювати положення її максимуму в усьому робочому кутомісному секторі до мінімального кута, визначеного другим інтерференційним провалом верхнього елемента компенсаційної АР. Верхні елементи компенсаційної АР можна розташувати високо над землею і за рахунок цього забезпечити вимірювання малих кутів місця. 2 40793 де e - кут місця; h - висота підйому над землею нижнього елемента компенсаційної антенної решітки; d - відстань по висоті між сусідніми елементами компенсаційної АР; n - номер елемента компенсаційної АР, підключеного до АК; l - довжина хвилі. Сигнал в основному каналі АК пропорційний ДН основної приймально-передавальної антени, а ця ДН F(e) приблизно визначається наступним співвідношенням: Для доказу можливості одержання вузької пеленгаційної характеристики при порівняно широкій ДН основної антени і неспрямованій ДН поточного елемента компенсаційної АР нижче надаються необхідні математичні співвідношення і розрахункові характеристики. Сигнал у компенсаційному каналі АК пропорційний діаграмі направленості поточного n-гo елементa АР з урахуванням впливу землі, а ця ДН Fn(e) визначається наступним співвідношенням: ì 2p ü Fn (e ) = siní [h + (n - 1)d] sin e ý , îl þ (2) ì é pL pù pù ü é pL sin e - ú ï sin e + ú sin ê ï sin 2ûï æ 2p 2û öpï ê l ë ël F( e) = sin ç h0 sin e ÷ í + ý, pL p ï è l ø 4 ï pL sin e + p sin e ï 2 ï 2 l l î þ не потрапить на вхід приймача. Під кутом місця інтерференційного провалу сигнал у компенсаційному каналі буде дуже малий (близький до нуля), а в основному каналі сигнал буде мати значний рівень. Тому в області інтерференційного провалу відповідного елемента АР автокомпенсатор перестане пригнічувати сигнал, тому що керований каскад АК має обмежений (порівняно малий) коефіцієнт підсилення і не зможе підсилити майже нульовий сигнал компенсаційного каналу до необхідного рівня. При цьому сигнал основного каналу прийому потрапить з виходу АК на вхід приймача. Так формується вузька пеленгаційна характеристика по сигналу на виході АК. Пеленгаційна характеристика сигналу Un(e) на виході автокомпенсатора для n-го елемента компенсаційної АР визначається наступним співвідношенням : де ho - висота підйому над землею основної приймально-передавальної антени; L - вертикальний розмір апертури основної антени. При цьому припускається, що компенсаційна АР виконана з горизонтальних симетричних вібраторів, а амплітудний розподіл по висоті апертури основної антени косинусоїдальний і вісь антени спрямована горизонтально. Слід зазначити, що формули (2), (3) отримані для порівняно малих кутів місця, коли коефіцієнт відбиття радіохвиль від землі приблизно дорівнює 1. Для формування вузької пеленгаційної характеристики використано відомий кореляційний автокомпенсатор. Принцип дії і устрій такого автокомпенсатора описані в літературі. АК у найпростішому вигляді має два входи (основний і компенсаційний) і один вихід. Автокомпенсатор складається із суматора, кола кореляційного зворотнього зв'язку, яке включає перемножувач сигналів основного і компенсаційного каналів АК з усереднювачем результату множення, і керованого каскаду, який управляє сигналом компенсаційного каналу і вирівнює його амплітуду і фазу із сигналом основного каналу. Пригнічення сигналу здійснюється у суматорі АК шляхом протифазного підсумування сигналів основного і компенсаційного каналів [3]. Коли сигнали в основному і компенсаційному каналах порівняно мало відрізняються за рівнем, АК буде ефективно пригнічувати сигнал і він ì F( e ) ï ï Fn (e ) ï Kn = í ï ïK ï max î (3) Un(e)=A×[F(e)-KnFn(e)], (4) де А - амплітудний коефіцієнт; F(e) - ДН основної приймально-передавальної антени, що визначається співвідношенням (3); Fn(e) - ДН n-го елемента компенсаційної АР, що визначається співвідношенням (2); Kn - коефіцієнт передачі керованого каскаду автокомпенсатора, який визначається слідуючим співвідношенням: F( e) Kmax ; Fn ( e ) при де Кmах - максимальний коефіцієнт підсилення керованого каскаду АК [4]. За формулами (2-5) розраховані діаграми направленості F(e), Fn (e) основної антени і n-го елемента компенсаційної АР, а також пеленгаційна характеристика АК для n -го елемента АР (n=6). Результати розрахунків приведені на фіг. 2, де показані ДН основної антени (крива 1), ДН n-го елемента компенсаційної АР (крива 2, n=6) і пеленгаційна характеристика АК для n-го елемента АР (крива 3). 3 40793 ристики по куту місця. Перемикач елементів компенсаційної АР З потрібен для стрибкоподібного огляду робочого кутомісного сектора шляхом підключення елементів АР до компенсаційного входу АК. Проведені розрахунки підтверджують можливість практичної реалізації винаходу. Таким чином, запропонований пристрій може бути практично реалізований і усуває вказані недоліки аналога і прототипу, а відзначені вище відмітні ознаки є істотними і принципово необхідні для реалізації пристрою. Основні елементи запропонованого пристрою на фіг.1 виконані наступним чином. Приймально-передавальна антена 1 виконана у вигляді синфазної лінійної антенної решітки з порівняно невеликої кількості горизонтальних вібраторів і з порівняно малою висотою підйому антени над землею. Компенсаційна АР 2 виконана у вигляді АР із рознесених по висоті горизонтальних вібраторів, кожний елемент якої зв'язаний із перемикачем 3 фідерними лініями довільної довжини. Кількість вібраторів компенсаційної АР порівняно велика, а верхній елемент цей АР розташований високо над землею. Перемикач 3 елементів компенсаційної АР має відому конструкцію. Автокомпенсатор 6 може бути виконаний на аналогових або цифрових елементах. У аналоговому виконанні перемножувач автокомпенсатора представляє змішувач частот. У якості усереднювача цього перемножувача можна використати вузькосмужний фільтр. Вимоги до автокомпенсатора порівняно невисокі і не потрібно забезпечувати його високий динамічний діапазон. Обчислювач 8 кута місця цілі по формулі (1) може бути виконаний у вигляді мік-роЕОМ. Антенний перемикач "прийом-передача" 4, імпульсний передавач 5 і приймач 7 не відрізняються від відповідних елементів прототипу [5]. Динаміка роботи запропонованого пристрою здійснюється таким чином. Імпульсний передавач 5 формує, а приймально-передавальна антена 1 випромінює високочастотний імпульсний сигнал, що зондує простір. Ця ж основна антена, як і елементи компенсаційної АР, приймає ехо-сигнали від повітряних цілей. Перемикач 3 елементів компенсаційної АР періодично підключає елементи АР до компенсаційного входу кореляційного автокомпенсатора 6, на основний вхід якого надходять сигнали приймально-передавальної антени 1. Автокомпенсатор 6 пригнічує прийняті сигнали скрізь, за винятком областей інтерференційних провалів підключеного елемента компенсаційної АР, і формує вузьку по куту місця пеленгаційну характеристику. При переключенні елементів АР положення пеленгаційної характеристики змінюється, і цим забезпечується стрибкоподібний огляд по куту місця. Сигнал із виходу АК надходить на вхід приймача 7 і підсилюється ним. Обчислювач 8 обчислює кут місця цілі для тих положень перемикача 3, при яких на виході приймача з'являється ехо-сигнал цілі. Таким чином, запропонований пристрій вирішує поставлену задачу, а саме забезпечує вимір кутів місця повітряних цілей в усьому робочому кутомісному секторі, включаючи малі кути місця над Розрахунки показують, що вузька пеленгаціонна характеристика по сигналу на виході АК формується в області інтерференційних провалів ДН відповідного підключеного елемента компенсаційної АР (від другого провалу і вище, крім першого нижнього провалу). Пеленгаційна характеристика тим вужча, чим більший максимальний коефіцієнт підсилення Кmах керованого каскаду АК, і її можна змінювати шляхом регулювання цього коефіцієнта. При малій ширині пеленгаційної характеристики пристрій забезпечує високу точність виміру кута місця і високу розрізняючу здатність (значно вищу, ніж у прототипу). Однак, вибирати велике значення Кmах не слід, тому що при цьому буде важко реалізувати безпровальний огляд робочого кутомісного сектора шляхом переключення елементів АР і буде потрібна дуже велика кількість таких елементів. Кут місця повітряної цілі визначають по співвідношенню (1), отриманому із співвідношення (2) при відповідному положенні перемикача 3 елементів АР, при якому на виході приймача з'являється ехо-сигнал цілі. Нижня межа emіn інтервалу кутів місця, що вимірюються, визначається по положенням другого інтерференційного провалу верхнього N-го елемента компенсаційної АР за співвідношенням: emin = arcsin l , 2 × [h + d(N - 1)] (6) Для зменшення нижньої межі кутів місця, що вимірюються, варто вибрати велику висоту підйому верхнього елемента АР над землею. Це дозволяє забезпечити вимірювання значно менших кутів місця, ніж може забезпечити прототип. Розрахунки діаграм направленості антен і пеленгаційної характеристики на фіг. 2 проведені для запропонованого пристрою з наступними технічними параметрами: довжина хвилі -l = 1,8 м; кількість елементів компенсаційної антенної решітки - N =101; висота підйому над землею нижнього елемента АР - h = 4 м; висота підйому над землею верхнього елемента АР - 49 м; відстань по висоті між сусідніми елементами АР - d = 0,45 м; вертикальний розмір апертури приймальнопередавальної антени L = 5м; висота підйому над землею приймально-передавальної антени - ho = 3,5м; амплітудний розподіл по висоті приймальнопередавальної антени - косинусоїдальний; поляризація радіохвиль - горизонтальна; максимальний коефіцієнт підсилення керованого каскаду автокомпенсатора - Кmах = 5; кутомісцевий робочий сектор - від 1° до 16°. Слід зазначити, що при круговому огляді простору можна обертати по азимуті тільки основну приймально-передавальну антену, а компенсаційну АР виконати нерухомою з неспрямованою по азимуту ДН (наприклад, шляхом використання в АР вібраторних турнікетних елементів). Автокомпенсатор 6 принципово необхідний для формування вузької пеленгаційної характе 4 40793 землею, а також підвищує точність вимірювань без необхідності збільшення розмірів основної антени і гойдання її по куту місця. Під ред. М.М.Вейсбейна - М.: Сов. радио, 1970. 1,с.69, фіг.1. 3. Теоретичні основи радіолокації / Я.Д.Ширман, В.Н.Голиков, И.Н.Бусигін і ін. Під ред. Я.Д.Ширмана. - М.: Сов. радио, 1970, с.432, фіг.7.6. 4. Теоретичні основи радіолокації / Я.Д.Ширман, В.Н.Голиков, И.Н.Бусигін і ін. Під ред. Я.Д.Ширмана. - М.: Сов. радио, 1970, с.433. 5. Довідник по радіолокації / Під ред. М.Сколника. Пер. з англ. під загальною ред. К.Н.Трофимова. Том 2. Радіолокаційні антенні пристрої. Під ред. М.М.Вейсбейна - М.: Сов. радио, 1970.1, с.35. Джерела інформації 1. Довідник по основам радіолокаційної техніки / А.М.Педак, П.И.Баклашов, Л.Л.Барвинский і ін. Під ред. В.В.Дружиниа. - М.: Воениздат, 1967,с.48. 2. Довідник по радіолокації / Під ред. М.Сколника. Пер. з англ. під загальною ред. К.Н.Трофимова. Том 4. Радіолокаційні станції і системи. Фіг. 1 5 40793 Фіг. 2 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 6
ДивитисяДодаткова інформація
Назва патенту англійськоюLand-based radar elevation finder of air targets
Автори англійськоюBakhvalov Valentyn Borysovych, Zyukin Volodymyr Fedorovych, Mykhailenko Volodymyr Prokopovych, Hryzo Andriy Arkadiyovych, Holovanov Valeriy Pavlovych
Назва патенту російськоюНаземный радиолокационный измеритель углов места воздушных целей
Автори російськоюБахвалов Валентин Борисович, Зюкин Владимир Федорович, Михайленко Владимир Прокопович, Гризо Андрей Аркадьевич, Голованов Валерий Павлович
МПК / Мітки
МПК: G01S 13/00, G01S 13/06
Мітки: радіолокаційний, місця, кутів, наземний, повітряних, цілей, вимірювач
Код посилання
<a href="https://ua.patents.su/6-40793-nazemnijj-radiolokacijjnijj-vimiryuvach-kutiv-miscya-povitryanikh-cilejj.html" target="_blank" rel="follow" title="База патентів України">Наземний радіолокаційний вимірювач кутів місця повітряних цілей</a>
Радіолокаційний вимірювач кута місця малошвидкісних повітряних цілей на фоні зворотних перешкодових відбитків від землі
Номер патенту: 15176
Опубліковано: 30.06.1997
Автори: Осипа Володимир Олександрович, Бахвалов Борис Миколайович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: землі, фоні, місця, малошвидкісних, відбитків, зворотних, кута, перешкодових, цілей, повітряних, вимірювач, радіолокаційний
Формула / Реферат:
Радиолокационный измеритель угла места малоскоростных воздушных целей на фоне обратных помеховых отражений от земли, содержащий передатчик, приемник, приемопередающую антенну с антенным переключателем, устройство угломестного качания антенны с датчиком угла места и индикатор, отличающийся тем, что передатчик, приемник и антенна выполнены для излучения и приема несинусоидальных импульсных сигналов в виде периодической последовательности...
Радіолокаційний вимірювач кута місця цілі
Номер патенту: 13421
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Бахвалов Борис Миколайович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: цілі, радіолокаційний, кута, вимірювач, місця
Формула / Реферат:
Радиолокационный измеритель угла места цели, содержащий передатчик, приемник, индикатор и приемо-передающую антенну с антенным переключателем, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, антенна выполнена в виде вибраторной решетки с плоским металлическим рефлектором, в которой расстояние между вибраторами по высоте равно высоте h подъема нижнего...
Наземний радіолокаційний висотомір
Номер патенту: 15947
Опубліковано: 30.06.1997
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/00
Мітки: висотомір, радіолокаційний, наземний
Формула / Реферат:
Наземный радиолокационный высотомер, содержащий приемо-передающую антенну с антенным переключателем и устройством качания ее по углу места, соединенную последовательно с датчиком угла места и индикатором РЛС, передатчик и приемник, соединенные антенным переключателем с приемо-передающей антенной, отличающийся тем, что на выходе приемника установлены два широкополосных диода противоположной полярности, один из которых связан со входом...
Радіолокаційний фазовий вимірювач кутових координат із бе3упинним випромінюванням
Номер патенту: 40133
Опубліковано: 16.07.2001
Автори: Порошин Сергій Михайлович, Бахвалов Валентин Борисович
МПК: G01S 3/14
Мітки: вимірювач, кутових, радіолокаційний, бе3упинним, фазовий, випромінюванням, координат
Формула / Реферат:
Радіолокаційний фазовий вимірювач кутових координат із безупинним випромінюванням, що містить передавач безупинного сигналу, пов'язаний прямокутним хвилеводом із рупорною антеною, що передає, приймальну антенну систему, приймачі і два фазовимірювача, що відрізняються тим, що приймальна антенна система виконана з трьох рупорних антен із двох однакових пірамідальних рупори в кожній антені, розташованих на відстані друг від друга по...
Радіолокаційний вимірювач радіальної швидкості
Номер патенту: 40131
Опубліковано: 16.07.2001
Автори: Бахвалов Валентин Борисович, Порошин Сергій Михайлович
МПК: G01S 3/02
Мітки: радіальної, радіолокаційний, вимірювач, швидкості
Формула / Реферат:
Радіолокаційний вимірювач радіальної швидкості, що містить передавач безупинного сигналу з антеною, що передає, приймальну антену, приймач і вимірювач частоти Доплера, який відрізняється тим, що передавач виконаний у виді генератора проміжної частоти fпp і двох помножителей цієї частоти на ціле число N і N+2 відповідно, виходи яких пов'язані з антеною, що передає, до складу приймача додатково включений помножитель проміжної частоти fпp...
Попередній патент: Машина в.р.хацаюка “ха-8″
Наступний патент: Протипотоковий ротаційний пиловіддільник
Випадковий патент: Мінний загороджувач