Спосіб діагностики параметрів синхронного двигуна


Формула / Реферат
Спосіб діагностики параметрів синхронного двигуна, який полягає в тому, що розрахунковим шляхом визначається взаємне положення системи обмоток статора й осі обмотки збудження в нерухомому стані ротора двигуна, підключаються статорні обмотки двигуна до джерела полігармонійної випробувальної напруги, вимірюються миттєві значення фазних струмів і напруг, визначається їхній гармонійний склад, розділяються напруги та струми статора на поздовжню й поперечну складові, визначаються комплексні опори Т-подібних схем заміщення синхронного двигуна по поздовжній та поперечній осі для гармонік, амплітуда яких не менша за визначене значення, причому кількість гармонік визначається як ![]() де
де ![]() - кількість невідомих коефіцієнтів при
- кількість невідомих коефіцієнтів при ![]() (номер гармоніки), складається система з
(номер гармоніки), складається система з ![]() рівнянь на основі наведених нижче виразів для
рівнянь на основі наведених нижче виразів для ![]() гармонік, з визначених коефіцієнтів розраховуються параметри Т-подібних схем заміщення синхронного двигуна по поздовжній і поперечній осі, який відрізняється тим, що параметри обмотки збудження визначаються при впливі на неї синусоїдальною напругою (на етапі визначення кута положення ротора) з використанням миттєвих значень напруги та струму обмотки збудження, а також напруги на затискачах однієї з обмоток статора, параметри статорного кола визначаються з використання миттєвих значень напруги на затискачах розімкненої обмотки збудження, напруги та струму статора при дії на статор полігармонійною випробувальною напругою (на другому етапі діагностики параметрів), параметри обмоток статора визначаються по перших гармоніках зазначених величин, для визначення інших параметрів схем заміщення складається система з 8-ми рівнянь на основі наведених нижче виразів для 4-х гармонік:
гармонік, з визначених коефіцієнтів розраховуються параметри Т-подібних схем заміщення синхронного двигуна по поздовжній і поперечній осі, який відрізняється тим, що параметри обмотки збудження визначаються при впливі на неї синусоїдальною напругою (на етапі визначення кута положення ротора) з використанням миттєвих значень напруги та струму обмотки збудження, а також напруги на затискачах однієї з обмоток статора, параметри статорного кола визначаються з використання миттєвих значень напруги на затискачах розімкненої обмотки збудження, напруги та струму статора при дії на статор полігармонійною випробувальною напругою (на другому етапі діагностики параметрів), параметри обмоток статора визначаються по перших гармоніках зазначених величин, для визначення інших параметрів схем заміщення складається система з 8-ми рівнянь на основі наведених нижче виразів для 4-х гармонік:
де ![]() - номер гармоніки струму та напруги,
- номер гармоніки струму та напруги,
![]()
![]() - активні та індуктивні опори контуру, що включає паралельно з’єднані контур взаємоіндукції і демпферний контур по поздовжній (поперечній) осі,
- активні та індуктивні опори контуру, що включає паралельно з’єднані контур взаємоіндукції і демпферний контур по поздовжній (поперечній) осі,
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() - коефіцієнти, що включають параметри схем заміщення та визначаються при вирішенні систем рівнянь,
- коефіцієнти, що включають параметри схем заміщення та визначаються при вирішенні систем рівнянь,
![]() - індуктивні опори взаємоіндукції по поздовжній і поперечній осях,
- індуктивні опори взаємоіндукції по поздовжній і поперечній осях,
![]() - опори, що еквівалентні втратам у сталі по поздовжній і поперечній осях відповідно,
- опори, що еквівалентні втратам у сталі по поздовжній і поперечній осях відповідно,
![]() - активні опори демпферних контурів по поздовжній і поперечній осях,
- активні опори демпферних контурів по поздовжній і поперечній осях,
![]() - індуктивні опори розсіювання демпферних контурів по поздовжній і поперечній осях,
- індуктивні опори розсіювання демпферних контурів по поздовжній і поперечній осях,
зі знайдених коефіцієнтів визначаються невідомі параметри схем заміщення:
![]()
![]()
![]()
![]()
визначення параметрів двох інших статорних обмоток здійснюється аналогічно.
Текст
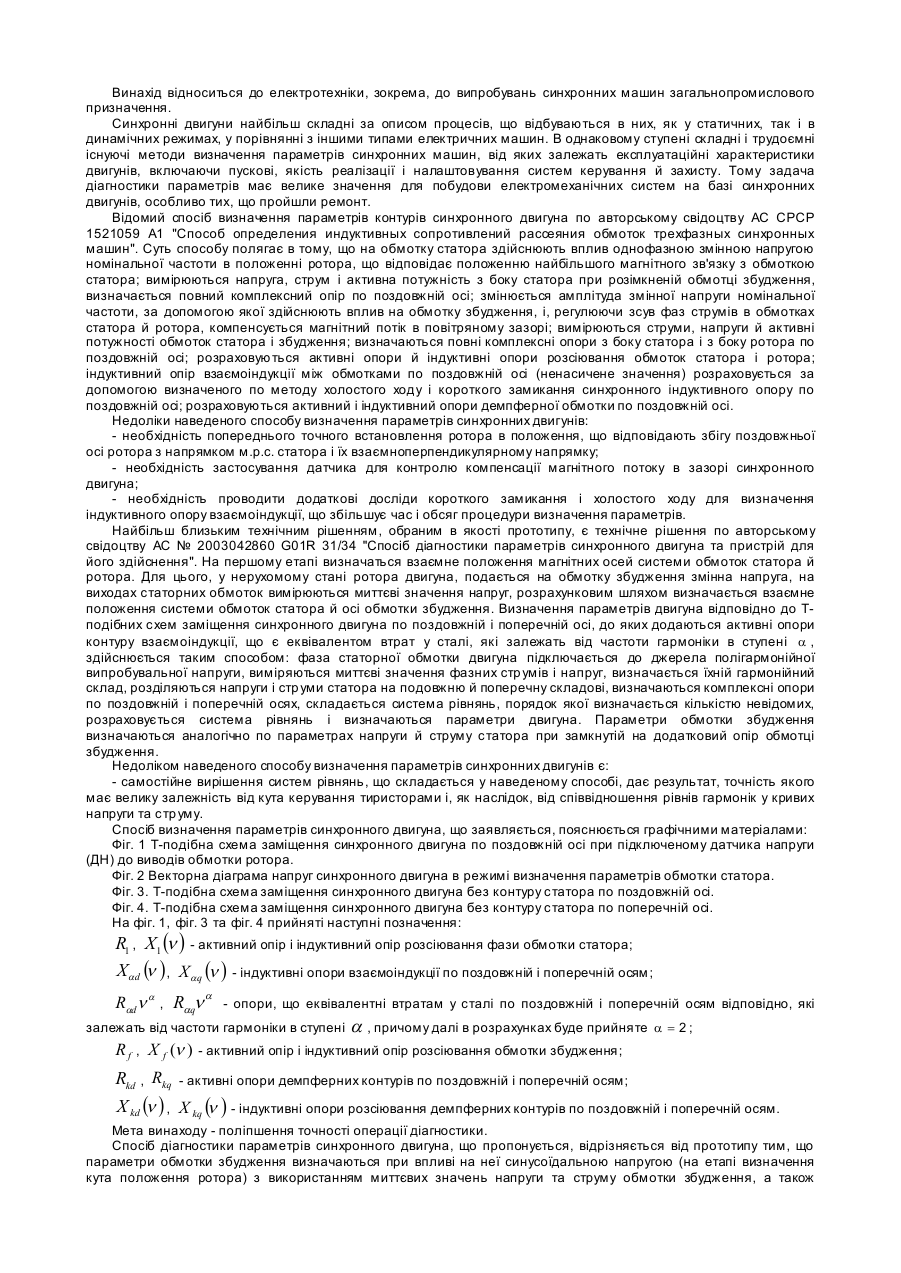
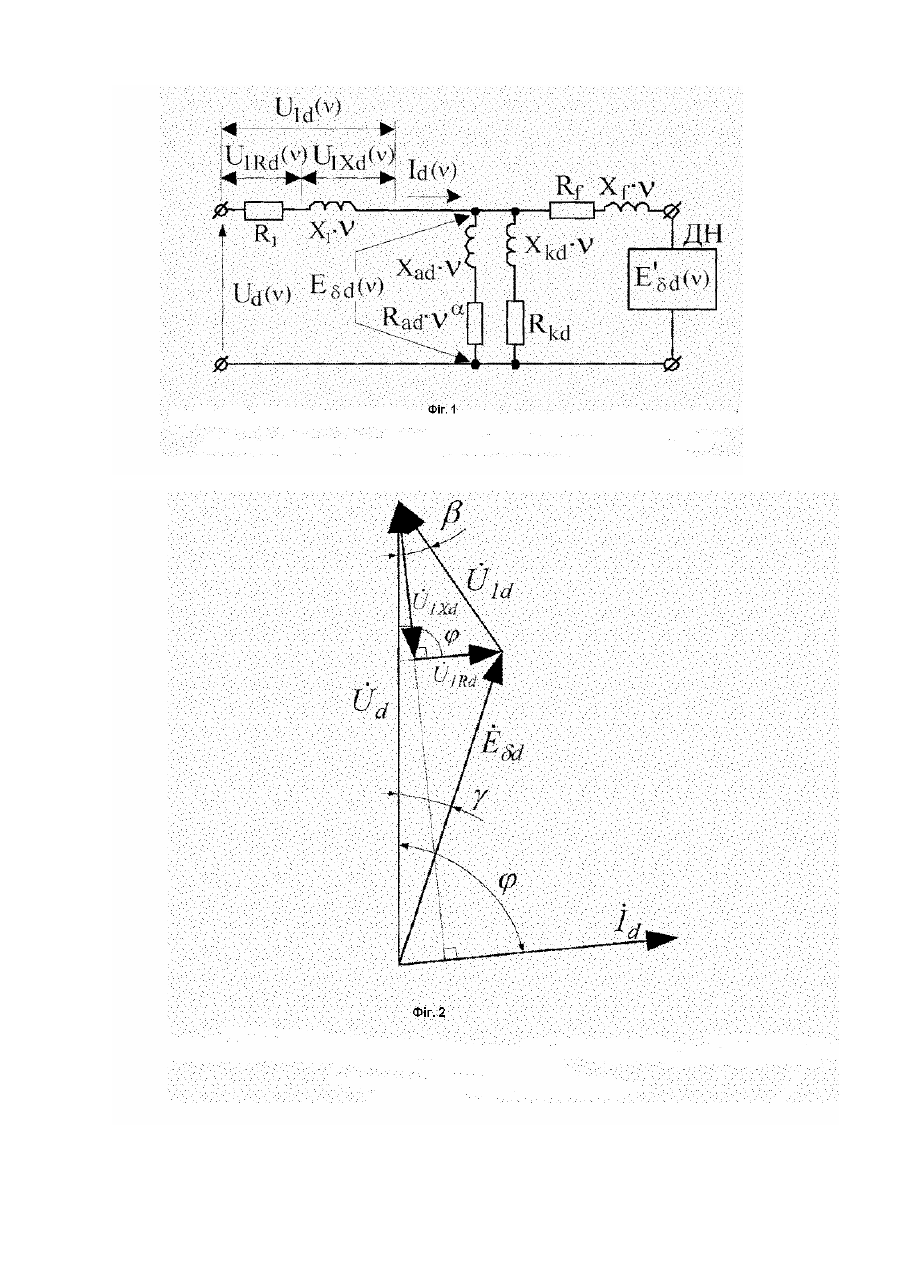
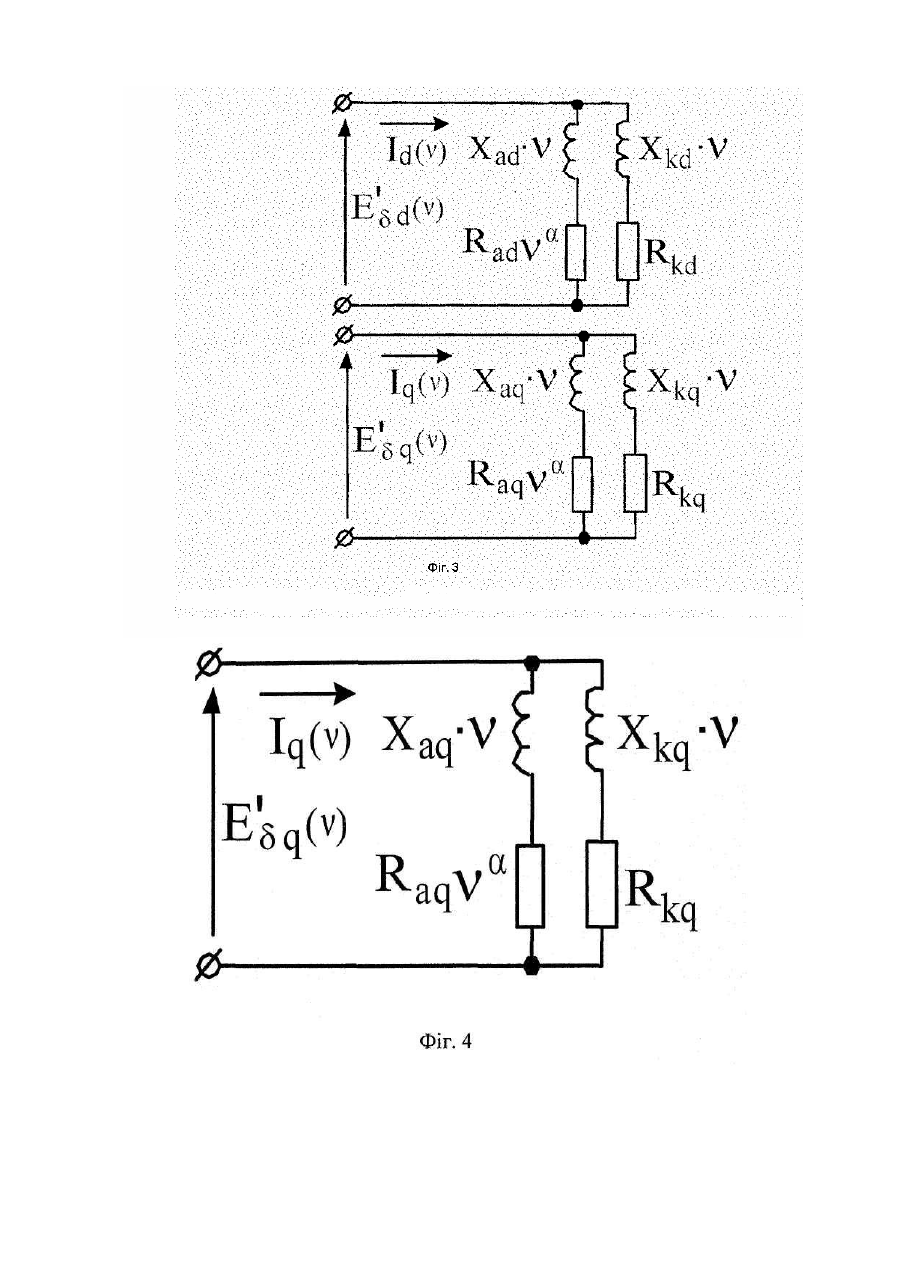
Винахід відноситься до електротехніки, зокрема, до випробувань синхронних машин загальнопромислового призначення. Синхронні двигуни найбільш складні за описом процесів, що відбуваються в них, як у статичних, так і в динамічних режимах, у порівнянні з іншими типами електричних машин. В однаковому ступені складні і трудоємні існуючі методи визначення параметрів синхронних машин, від яких залежать експлуатаційні характеристики двигунів, включаючи пускові, якість реалізації і налаштовування систем керування й захисту. Тому задача діагностики параметрів має велике значення для побудови електромеханічних систем на базі синхронних двигунів, особливо тих, що пройшли ремонт. Відомий спосіб визначення параметрів контурів синхронного двигуна по авторському свідоцтву АС СРСР 1521059 А1 "Способ определения индуктивных сопротивлений рассеяния обмоток трехфазных синхронных машин". Суть способу полягає в тому, що на обмотку статора здійснюють вплив однофазною змінною напругою номінальної частоти в положенні ротора, що відповідає положенню найбільшого магнітного зв'язку з обмоткою статора; вимірюються напруга, струм і активна потужність з боку статора при розімкненій обмотці збудження, визначається повний комплексний опір по поздовжній осі; змінюється амплітуда змінної напруги номінальної частоти, за допомогою якої здійснюють вплив на обмотку збудження, і, регулюючи зсув фаз струмів в обмотках статора й ротора, компенсується магнітний потік в повітряному зазорі; вимірюються струми, напруги й активні потужності обмоток статора і збудження; визначаються повні комплексні опори з боку статора і з боку ротора по поздовжній осі; розраховуються активні опори й індуктивні опори розсіювання обмоток статора і ротора; індуктивний опір взаємоіндукції між обмотками по поздовжній осі (ненасичене значення) розраховується за допомогою визначеного по методу холостого ходу і короткого замикання синхронного індуктивного опору по поздовжній осі; розраховуються активний і індуктивний опори демпферної обмотки по поздовжній осі. Недоліки наведеного способу визначення параметрів синхронних двигунів: - необхідність попереднього точного встановлення ротора в положення, що відповідають збігу поздовжньої осі ротора з напрямком м.р.с. статора і їх взаємноперпендикулярному напрямку; - необхідність застосування датчика для контролю компенсації магнітного потоку в зазорі синхронного двигуна; - необхідність проводити додаткові досліди короткого замикання і холостого ходу для визначення індуктивного опору взаємоіндукції, що збільшує час і обсяг процедури визначення параметрів. Найбільш близьким технічним рішенням, обраним в якості прототипу, є технічне рішення по авторському свідоцтву АС № 2003042860 G01R 31/34 "Спосіб діагностики параметрів синхронного двигуна та пристрій для його здійснення". На першому етапі визначаться взаємне положення магнітних осей системи обмоток статора й ротора. Для цього, у нерухомому стані ротора двигуна, подається на обмотку збудження змінна напруга, на виходах статорних обмоток вимірюються миттєві значення напруг, розрахунковим шляхом визначається взаємне положення системи обмоток статора й осі обмотки збудження. Визначення параметрів двигуна відповідно до Тподібних схем заміщення синхронного двигуна по поздовжній і поперечній осі, до яких додаються активні опори контуру взаємоіндукції, що є еквівалентом втрат у сталі, які залежать від частоти гармоніки в ступені a , здійснюється таким способом: фаза статорної обмотки двигуна підключається до джерела полігармонійної випробувальної напруги, виміряються миттєві значення фазних стр умів і напруг, визначається їхній гармонійний склад, розділяються напруги і стр уми статора на подовжню й поперечну складові, визначаються комплексні опори по поздовжній і поперечній осях, складається система рівнянь, порядок якої визначається кількістю невідомих, розраховується система рівнянь і визначаються параметри двигуна. Параметри обмотки збудження визначаються аналогічно по параметрах напруги й струму статора при замкнутій на додатковий опір обмотці збудження. Недоліком наведеного способу визначення параметрів синхронних двигунів є: - самостійне вирішення систем рівнянь, що складається у наведеному способі, дає результат, точність якого має велику залежність від кута керування тиристорами і, як наслідок, від співвідношення рівнів гармонік у кривих напруги та стр уму. Спосіб визначення параметрів синхронного двигуна, що заявляється, пояснюється графічними матеріалами: Фіг. 1 Т-подібна схема заміщення синхронного двигуна по поздовжній осі при підключеному датчика напруги (ДН) до виводів обмотки ротора. Фіг. 2 Векторна діаграма напруг синхронного двигуна в режимі визначення параметрів обмотки статора. Фіг. 3. Т-подібна схема заміщення синхронного двигуна без контуру статора по поздовжній осі. Фіг. 4. Т-подібна схема заміщення синхронного двигуна без контуру статора по поперечній осі. На фіг. 1, фіг. 3 та фіг. 4 прийняті наступні позначення: R1 , X1 (n ) - активний опір і індуктивний опір розсіювання фази обмотки статора; Xad ( ) , Xaq (n ) - індуктивні опори взаємоіндукції по поздовжній і поперечній осям; n Radn a , Raqn a - опори, що еквівалентні втратам у сталі по поздовжній і поперечній осям відповідно, які залежать від частоти гармоніки в ступені R f , X f (n ) a , причому далі в розрахунках буде прийняте a =2; - активний опір і індуктивний опір розсіювання обмотки збудження; Rkd , Rkq - активні опори демпферних контурів по поздовжній і поперечній осям; X kd (n ) , X kq ( ) - індуктивні опори розсіювання демпферних контурів по поздовжній і поперечній осям. n Мета винаходу - поліпшення точності операції діагностики. Спосіб діагностики параметрів синхронного двигуна, що пропонується, відрізняється від прототипу тим, що параметри обмотки збудження визначаються при впливі на неї синусоїдальною напругою (на етапі визначення кута положення ротора) з використанням миттєвих значень напруги та струму обмотки збудження, а також напруги на затискачах однієї з обмоток статора. Параметри статорного кола визначаються з використанням миттєвих значень напруги на затискачах розімкненої обмотки збудження, напруги та струму статора при дії на статор полвгармонійною випробувальною напругою (на другому етапі діагностики параметрів), параметри обмоток статора визначаються по першим гармонікам зазначених величин. Для визначення інших параметрів схем заміщення складається система з 8-ми рівнянь для 4-х гармонік. Розраховується система рівнянь, і знаходяться коефіцієнти при n . Зі знайдених коефіцієнтів визначаються невідомі параметри схем заміщення. Визначення параметрів синхронного двигуна за схемами заміщення здійснюється у два етапи. На першому етапі, у режимі визначення кута між магнітними осями системи статорних обмоток і обмотки збудження, на обмотку збудження здійснюється вплив змінною синусоїдальною напругою та контролюються миттєві значення напруг на розімкнених обмотках статора, напруга та струм обмотки збудження. Використовуючи отримані дані визначаються параметри обмотки збудження. На другому етапі, у режимі діагностики параметрів синхронного двигуна, на одну з фаз статора від тиристорного регулятора (працюють тиристори тільки однієї з фаз) подається полігармонійна випробувальна напруга, ланцюг обмотки збудження розривається, вимірюються миттєві значення фазних струмів і напруг, напруги на затискачах обмотки збудження, визначається їх гармонійний склад, розділяються напруги і струми статора на поздовжню та поперечну складові, визначаються комплексні опори по поздовжній і поперечній осях, складається система рівнянь, порядок якої визначається кількістю невідомих, розраховується система рівнянь і визначаються параметри двигуна. Для підвищення точності і стійкості одержуваних рішень, а також для скорочення часу розрахунків, параметри статорного кола визначаються шляхом використання кривої напруги, знятої із затискачів обмотки ротора при дії на статор полігармонійною випробувальною напругою, тобто під час проведення другого етапу діагностики параметрів. Вимірювана напруга на виводах розімкненої обмотки ротора фактично є так званою е.р.с. за опорами & обмотки статора (активним опором і індуктивним опором розсіювання) по поздовжній осі - E' dd (n ) (приведене значення, фіг. 1). При цьому можна знайти падіння напруги на опорах обмотки статора (фіг. 2): & & & U ld (n ) = U d (n ) - Edd (n ) ; & & & U (n ) = U (n ) + U (n ) , ld & n де U d ( ) lRd lXd - вектор напруги статора по поздовжній осі; n - номер гармоніки; & E dd (n ) - вектор е.р.с. за опорами обмотки статора; & & U lRd (n ) , U lXd (n ) - вектори падіння напруг на активному опорі й індуктивному опорі розсіювання обмотки статора відповідно. Визначення параметрів обмотки статора здійснюється для перших гармонік напруг і струм у. Напруга та е.р.с. за опорами обмотки статора по поздовжній осі розраховуються за формулами: U d = U × cos(jk ) ; Edd = E'dd ×k m , де U-напруга на обмотці статора; j k - кут між напрямком м.р.с. обмотки фази А і поперечною віссю обмотки збудження (визначається на першому етапі діагностики); k m - коефіцієнт трансформації напруги між обмотками статора та обмоткою збудження. Падіння напруги на повному опорі обмотки статора: U ld = Edd × sin (g ) , sin ( b ) & & де g - кут між векторами U d (n ) та E dd (n ) , & & b - кут між векторами U d (n ) та U ld (n ) : æ Edd × sin (g ) ö b = arctg ç ç U - E × cos(g ) ÷ . ÷ è d dd ø Падіння напруги на активному опорі та індуктивному опорі розсіювання обмотки статора: ( ( ) ) U lRd = U ld × sin j + b - p 2 ; U lXd = U ld × cos j + b - p 2 , де j - кут зсуву між векторами напруги та струму. Визначення параметрів обмотки статора здійснюється у за формулами (відповідно, активний опір обмотки та індуктивний опір розсіювання): Rl = U lRd Id ; Xl = U lXd Id , де I d - проекція струму статора на вісь d : Id = I × cos(j k + j) , І – амплітудне значення вектора струму статора. Параметри обмотки збудження обчислюються аналогічно вище приведеному способу визначення параметрів обмотки статора. При цьому параметри визначаються за кривими струму і напруги обмотки збудження і кривою напруги однієї з фаз ста тора, знятим під час проведення досліду визначення положення ротора. Після визначення параметрів обмотки статора та обмотки ротора задача визначення інших параметрів схем заміщення значно спрощується, тому, що тепер необхідно визначити параметри двох паралельно з'єднаних контурів при відомих стр умах і напругах (фіг. 3 та фіг. 4). З відомих значень струмів і е.р.с. по поздовжній і поперечній осі визначаються повні комплексні опори контуру, що включає паралельно з'єднані контур взаємоіндукції і демпферний контур. з повного комплексного опору визначають повні активні та індуктивні опори схем заміщення для n - гармонік: & E 'dd ( q ) ( ) n & Rå d ( q ) (n ) = Re Z å d (q ) (n ) = Re & ; I d (q ) (n ) & E'dd (q ) ( ) n & X å d (q ) (n ) = Im Z å d ( q) ( ) = Im & n , I d ( q ) (n ) & (n ) - повний комплексний опір схем заміщення по осі d (q) для n -ї гармоніки. де Z åd (q ) Для визначення параметрів схем заміщення по осі d (q) складається та розраховується система з 8-ми рівнянь на основі приведених нижче виразів для 4-х гармонік струму та напруги: 0 = n 4 × h1d ( q) + n 2 × h2d ( q) - Rå d (q ) (n ) × m3d ( q) - Rå d ( q) ( ) ×n 4 × m1d (q ) - Rå d (q ) (n ) ×n 2 × m2d ( q ) n ; 0 = n 5 × g1d ( q) + n 3 × g 2d (q ) +n × g 3d ( q) - X å d ( q ) (n ) × m3d (q ) - X å d (q ) (n ) ×n 4 × m1d ( q ) - X nd ( q ) (n ) ×n 2 × m2 d (q ) де коефіцієнти при n визначаються як: 2 2 h1d (q ) = Rkd ( q) × Rad ( q) + Rad ( q) × X kd ( q) ; 2 2 h2d ( q ) = Rkd ( q) × X ad( q ) + Rad ( q) × Rkd ( q) ; 2 m1d ( q ) = Rad ( q) ; 2 2 m2d ( q) = X ad ( q) + X kd ( q ) + 2 X ad ( q) X kd ( q) + 2Rad( q ) Rkd ( q ) ; 2 m3 d ( q) = Rkd (q ) ; 2 g1d ( q) = X kd ( q) Rad ( q ) ; 2 2 g 2d (q ) = X ad ( q) X kd ( q ) + X ad( q ) X kd ( q) ; 2 g 3d ( q) = X ad ( q ) Rkd ( q) . Зі знайдених коефіцієнтів визначаються невідомі параметри (відповідно: активний опір демпферного контуру по повздовжній (поперечній) осі; активний опір контуру взаємоіндукції по повздовжній (поперечній) осі; індуктивний опір розсіювання демпферного контуру по повздовжній (поперечній) осі; індуктивний опір контуру взаємоіндукції по повздовжній (поперечній) осі: Rkd ( q) = m3d ( q) ; Rad ( q) = md ( q)1 ; X kd ( q ) = X ad ( q) = g3d (q ) ; m3d ( q ) g1 d ( q ) m1d ( q ) . Визначення параметрів двох інши х ста торних обмоток здійснюється аналогічно.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining parameters of a synchronous motor
Автори англійськоюKalinov Andrii Petrovych
Назва патенту російськоюСпособ определения параметров синхронного электродвигателя
Автори російськоюКалинов Андрей Петрович
МПК / Мітки
МПК: G01R 31/34, G01R 31/06
Мітки: параметрів, спосіб, двигуна, синхронного, діагностики
Код посилання
<a href="https://ua.patents.su/5-72133-sposib-diagnostiki-parametriv-sinkhronnogo-dviguna.html" target="_blank" rel="follow" title="База патентів України">Спосіб діагностики параметрів синхронного двигуна</a>
Спосіб діагностики параметрів синхронного двигуна та пристрій для його здійснення
Номер патенту: 65733
Опубліковано: 15.04.2004
Автори: Аміров Анатолій Мойсеєвич, Калінов Андрій Петрович, Родькін Дмитро Йосипович, Живора Валерій Федорович, Чорний Олексій Петрович
МПК: G01R 31/34
Мітки: спосіб, параметрів, двигуна, синхронного, пристрій, здійснення, діагностики
Формула / Реферат:
1. Спосіб діагностики параметрів синхронного двигуна, який полягає в тому, що при нерухомому роторі система статорних обмоток підключається до джерела зниженої змінної напруги, спочатку ротор за допомогою механічних засобів установлюється в положення, що відповідає збігу поздовжньої осі ротора з напрямком м p. c. статора, а потім - у їх взаємно перпендикулярне положення, вимірюються струм та напруга обмоток при зміні параметрів...
Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором та пристрій для його здійснення
Номер патенту: 36060
Опубліковано: 16.04.2001
Автори: Родькін Дмитро Йосипович, Чорний Олексій Петрович, Сисюк Геннадій Юрійович, Добрецов Володимир Валентинович, Пасмурских Олександр Олексійович, Вошун Олексій Миколайович, Долженко Віктор Володимирович, Луговой Анатолій Васильович
МПК: G01R 31/34
Мітки: ротором, діагностики, двигуна, асинхронного, здійснення, пристрій, параметрів, спосіб, короткозамкненим
Формула / Реферат:
1. Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором, який полягає в підключенні статорних обмоток до однофазної мережі промислової частоти, вимірюванні напруги, струму та кута зсуву між ними, в відключенні статорних обмоток від мережі в момент переходу струму через нуль, вимірюванні залишкової напруги після відключення, який відрізняється тим, що в момент відключення вимірюють стрибок напруги на затискачах статора...
Спосіб пуску синхронного двигуна
Номер патенту: 41735
Опубліковано: 17.09.2001
Автори: Нізімов Родіон Вікторович, Нізімов Віктор Борисович, С'янов Олександр Михайлович
МПК: H02P 1/16
Мітки: двигуна, синхронного, пуску, спосіб
Формула / Реферат:
1. Спосіб пуску синхронного двигуна, при якому синхронний двигун підмикають до мережі змінного струму через тиристорний перетворювач із природною комутацією, обмотку збудження підключають до пускового резистора, подають в обмотки статора імпульси струму, величина і тривалість яких формується різницею між дійсною і заданою величинами пускового струму статора, впливом на тиристорний перетворювач, який відрізняється тим, що роблять заряд...
Система запуску та контролю режимів роботи синхронного двигуна групи г-д
Номер патенту: 50114
Опубліковано: 15.10.2002
Автори: Чорний Олексій Петрович, Пасмурских Олександр Олексійович, Родькін Дмитро Йосипович, Марченко Андрій Бронікович, Вошун Олексій Миколайович, Зубова Олена Іванівна
МПК: H02P 7/06
Мітки: групи, двигуна, г-д, синхронного, роботи, контролю, режимів, система, запуску
Формула / Реферат:
1. Система запуску та контролю режиму роботи синхронного двигуна групи Г-Д, яка вмикає синхронний двигун з вимикачем у мережі статора, збуджувачем у мережі збудження та генератором постійного струму на валу, джерела живлення якірної мережі генератора з комутуючим апаратом, контакторний апарат в мережі живлення двигуна, перетворювачі для живлення обмотки збудження та якірної мережі на період пуску, яка відрізняється тим, що для спрощення...
Система запуску синхронного двигуна групи г-д
Номер патенту: 36065
Опубліковано: 16.04.2001
Автори: Долженко Віктор Володимирович, Чорний Олексій Петрович, Шварцман Ернст Володимирович, Родькін Дмитро Йосипович, Добрецов Володимир Валентинович, Вошун Олексій Миколайович, Луговой Анатолій Васильович, Пасмурских Олександр Олексійович
МПК: H02P 7/06
Мітки: система, г-д, запуску, двигуна, групи, синхронного
Формула / Реферат:
Система запуску синхронного двигуна групи Г-Д, що включає синхронний двигун, тиристорний двигун, тиристорний перетворювач, генератор постійного струму із збуджувачем, контакторний апарат, що з'єднує якірний ланцюг генератора з тиристорним перетворювачем, яка відрізняється тим, що додатково обладнана датчиками напруги і струму тиристорного перетворювача, датчиком струму збудження генератора, обчислювальним блоком з чотирма входами, причому...