Переносний електронний динамічний твердомір
Номер патенту: 72325
Опубліковано: 15.02.2005
Автори: Рибалко Сергій Борисович, Ошурко Сергій Володимирович, Колот Володимир Олександрович, Колот Олександр Володимирович, Дубейковський Сергій Станіславович, Кушнеренко Олександр Анатолійович

Формула / Реферат
1. Переносний електронний динамічний твердомір, що містить датчик у вигляді корпуса, розміщений у каналі корпуса ударний механізм із багатопелюстковою цангою, а також зв'язаний з нею одним кінцем рухливий індентор, що включає базову несучу деталь, знімну обойму з кулькою, закріплену в головній частині індентора, і постійний магніт, розташований у хвостовій частині індентора, який відрізняється тим, що базова несуча деталь виконана у вигляді центрального подовжнього стержня, у передній частині якого закріплена безпосередньо знімна обойма, сполучена з внутрішньою поверхнею каналу корпуса по симетричних щодо подовжньої осі ділянках з чергуванням між ними каналів для пропускання повітря, а в задній частині зазначеного стержня розміщений стабілізатор руху індентора у формі циліндричного бурту, що сполучається з внутрішньою поверхнею каналу корпуса по симетричних щодо подовжньої осі ділянках з чергуванням між ними каналів для пропускання повітря.
2. Твердомір по п. 1, який відрізняється тим, що довжина центрального подовжнього стержня узята в співвідношенні до сумарної довжини поверхонь контакту знімної обойми і стабілізатора руху з поверхнею каналу корпуса з врахуванням наступної нерівності
![]()
де Lц.с. - довжина центрального подовжнього стержня;
Lк.з о. - довжина поверхні контакту знімної обойми;
Lк.c.p - довжина поверхні контакту стабілізатора руху.
3. Твердомір по п. 1 або 2, який відрізняється тим, що зовнішній шар матеріалу знімної обойми і стабілізатора руху індентора виконаний із фторопласта.
4. Твердомір по будь - якому з пп. 1-3, який відрізняється тим, що канали для пропускання повітря в знімній обоймі і стабілізаторі руху індентора утворені скосами на корпусі обойми і дугами окружності внутрішньої поверхні корпуса.
5. Твердомір по будь - якому з пп. 1-4, який відрізняється тим, що кількість симетричних ділянок сполучення і каналів для протікання повітря в знімній обоймі й у стабілізаторі руху індентора узято парною.
6. Твердомір за будь - яким з пп. 1-5, який відрізняється тим, що площі прохідних перерізів каналів для пропускання повітря в знімній обоймі й у стабілізаторі руху індентора узяті однаковими.
7. Твердомір п. 1 або 6, який відрізняється тим, що кулька закріплена між торцевою поверхнею центрального подовжнього стержня і упорною поверхнею змінної обойми.
8 Твердомір п. 1 або 7, який відрізняється тим, що постійний магніт встановлений усередині центрального подовжнього стержня.
Текст
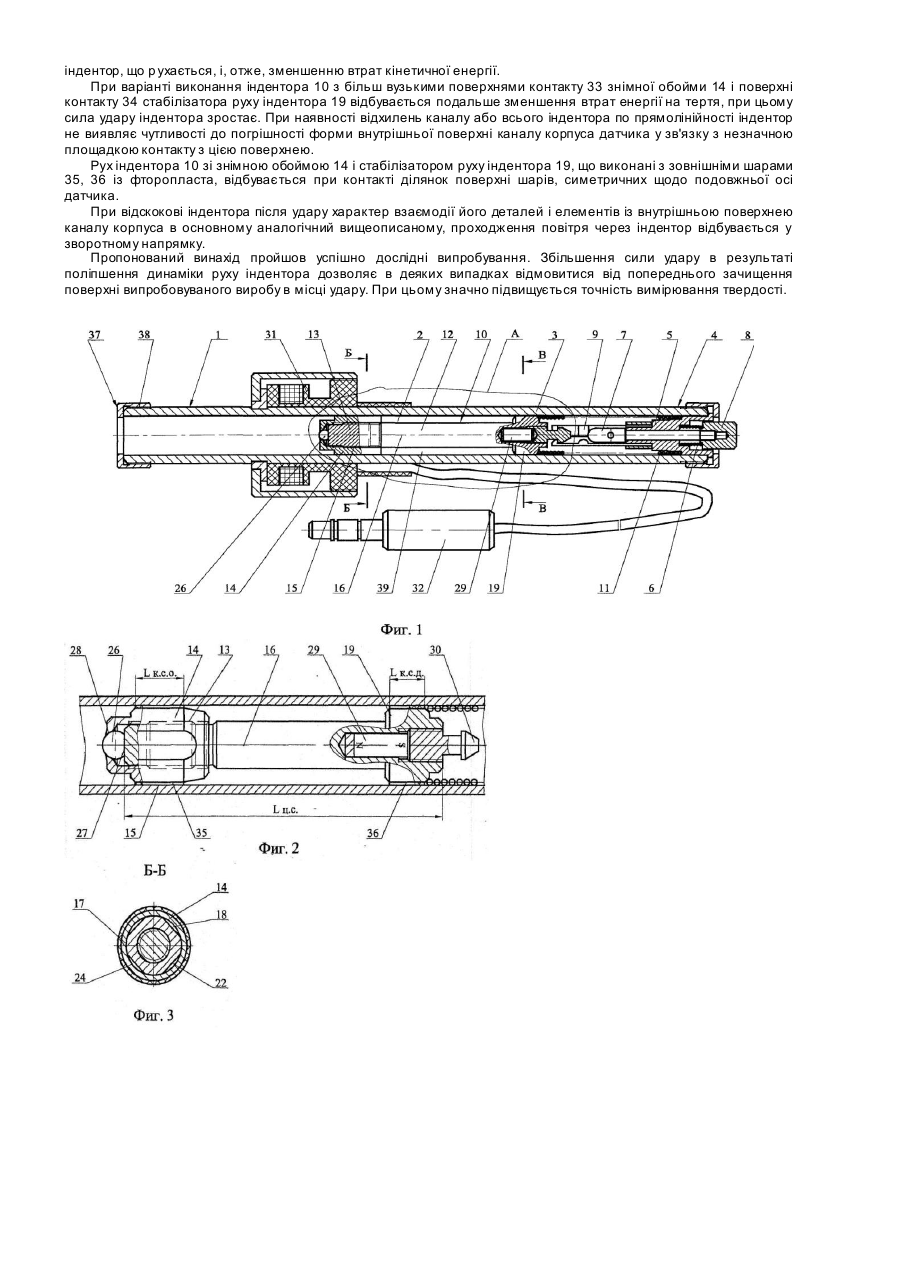
Винахід належить до випробувальної техніки і може бути використаний для вимірювання твердості матеріалів, переважно металів. Твердість або опір матеріалу місцевій пластичній деформації, що виникає при вдавлюванні в нього більш твердого тіла, визначається, в основному, приладами Бринелля, Виккерса, Роквелла, Шора. Для визначення твердості, наприклад, по Бринеллю, відомий стаціонарний твердомір виконаний у виді преса з індентором, на кінці якого знаходиться сталева кулька, яку вдавлюють у випробовувану поверхню при заданому навантаженні. Число твердості визначають як відношення навантаження до площі поверхні відбитка [Политехнический словарь, издательство «Советская энциклопедия», М., 1977, стр.60]. Характерною рисою наведених способів і приборів, зокрема, методів випробувань по Бринеллю, Виккерсу і Роквеллу, є використання стаціонарної апаратури, що істотно знижує технологічні можливості випробувань, крім того, часто неможливе проведення контролю виробів складної конфігурації у зонах утр удненого доступу, наприклад, зубів зубчастих коліс. шківів, труб та інши х подібних деталей. Для визначення твердості виробів складної конфігурації без їхнього руйнування розроблений твердомір, що містить кронштейн для закріплення прибору на верстаті, вузол виміру навантаження, скобу з кришкою, усередині якої розташований пристрій для консольного кріплення й переміщення столу, що складається з рукоятки, гвинта, втулки, закріпленої за допомогою гайки в основі скоби, насадки, повзуна з отворами для зміни положення столу [заявка на патент Російської Федерації №93000708/28, 1995, 6G01N3/42]. Відомий твердомір має більш широкі технологічні можливості і, проте, використання його утруднено при необхідності вимірювання твердості безпосередньо на деталі по місцю її розташування: форма предметного столу не може врахувати різноманітних конфігурацій виробів і їхнє розміщення в сполученні з іншими деталями, що приводить до зниження корисних властивостей відомого твердоміра. Останнім часом широке застосування починають знаходити переносні електронні динамічні твердоміри, засновані на принципі визначення відносини швидкості удару й відскоку індентора, яка перетворюється електронним блоком в умовну одиницю твердості. Так відомий переносний електронний динамічний твердомір системи EQUOTIP, вироблений швейцарською фірмою «PROCEQ» [Инструкция по эксплуатации. Прибор для измерения твердости металлов EQUOTIP, PROCEQ SA, ZURICH, SWITZEL AND, 1992]. Твердомір містить датчик у вигляді корпуса, розміщений у каналі корпуса ударний механізм, а також рухомий індентор, виконаний у виді ударного човника, який містить головну частину з кулькою ї хвостовою частиною, що взаємодіє із затискним механізмом. Найбільш близьким по технічній сутності і результатові, що досягається, є переносній електронний динамічний твердомір, який містить датчик у виді корпуса розмішений у каналі корпуса ударний механізм із багатопелюстковою цангою й пружиною, а також зв'язаний з нею одним кінцем рухомий індентор [заявка на патент Російської Федерації №93007041, 1995, 6G01N3/48]. Рухомий індентор містить корпус, у задній частині якого пробкою зафіксований постійний магніт, а в передній - усічена кулька, розташована між кришкою і знімною частиною корпуса індентора. Усічена кулька, кришка і знімна частина корпуса утворять знімну частину індентора. Близьке, по сутності, виконання конструкції індентора і механізмів твердоміра є основою для вибору зазначеної конструкції як прототипу винаходу, що заявляється. Найважливіша особливість роботи переносного електронного динамічного твердоміра полягає в динаміці руху індентора, що включає наступні етапи: запуск індентора під дією пружини ударного механізму, рух індентора в каналі корпуса, удар кулькою у вимірюваний об'єкт, відскік після удару в зворотному напрямку, фіксація індентора багатопелюстковою цангою й приведення його в готовність для наступного удару. При цьому умовою, що накладає додаткових труднощів на процес руху індентора в каналі корпуса, є обсяг повітря, що відтинається при зіткненні кінця корпуса датчика з вимірюваним об'єктом. Границями розміщення обсягу повітря є площина вимірюваного об'єкта і передня поверхня корпуса датчика індентора. При запиранні повітря в каналі корпуса створюється значний опір переміщенню індентора. Повітря варто пропустити через частини індентора, що рухаються, у задній простір каналу тр убки, а потім дати можливість піти йому назад при відскоку індентора. При розгляді прототипу у зв'язку з особливостями динаміки руху індентора необхідно відзначити наступні характерні елементи конструктивного виконання. Так у прототипі індентор має базову несучу деталь у виді корпусного тіла, що складається із самого корпуса і знімної частини. В останню входять кришка (даний термін замінений далі терміном «знімна обойма» при описі конструкції пропонованого винаходу), знімна частина корпуса й усічена кулька. Виконання індентора у виді складеної корпусної деталі погіршує умови його роботи при здійсненні складного по кінематиці руху в каналі корпуса. Корпусна деталь є відносно коротким тілом, як окремий аналог якого можна розглядати рух "короткого" снаряда в стволі артилерійської гармати. При цьому рух індентора в прототипі відбувається при наявності зазорів між зовнішньою циліндричною поверхнею кришки і внутрішньою поверхнею каналу корпуса і таких само зазорів у хвостовій частині індентора між максимальною зовнішньою циліндричною поверхнею корпуса і внутрішньою поверхнею каналу корпуса. Збільшені зазори сприяють прискореному пропускові повітря, але приводять до значних коливань індентора в каналі трубки при русі індентора в напрямку удару і його відскоку після удару, що приводить до зниження точності показань і витрат енергії удару. Кріплення знімної частини за допомогою нарізного з'єднання на хвостовику корпуса викликає небезпеку порушення центрування всієї знімної частини індентора щодо корпуса і, у результаті, до перекосу передньої частини індентора щодо задньої. У зв'язку з цим задачею даного винаходу є створення такої конструкції твердоміра, у якій шляхом зміни форми індентора, зв'язків і характеру взаємодії його деталей між собою і внутрішньою поверхнею каналу корпуса, досягається новий технічний результат - поліпшення динаміки руху індентора при ударі та відскокові, що приводить до зменшення витрат енергії, підвищення точності вимірювань і поліпшення технологічності виготовлення. Для вирішення поставленого завдання у відомій конструкції переносного електронного динамічного твердоміра, який містить датчик у виді корпуса, розміщений у каналі корпуса ударний механізм із багатопелюстковою цангою, а також зв'язаний з нею одним кінцем рухомий індентор, що включає базову несучу деталь, знімну обойму з кулькою, закріплену в головній частині індентора, і постійний магніт, розташований у хвостовій частині індентора, відповідно до винаходу, - базова несуча деталь виконана у виді центрального подовжнього стержня, у передній частині якого закріплена безпосередньо знімна обойма, сполучена з внутрішньою поверхнею каналу корпуса по симетричним щодо подовжньої осі ділянкам з чергуванням між ними каналів для пропуску повітря, а в задній частині зазначеного стержня розміщений стабілізатор у формі циліндричного бурту, що сполучається з внутрішньою поверхнею каналу корпуса по симетричним щодо подовжньої осі ділянкам з чергуванням між ними каналів для пропуску повітря. Причинно-наслідковий зв'язок між новою сукупністю ознак і технічним результатом полягає в наступному. Виконання базової несучої деталі індентора у виді стержня замість складеної корпусної деталі в прототипі, дозволяє рознести на відстань опорні частини індентора, що р ухається - знімну обойму і стабілізатор, і тим самим забезпечити строге центрування всього індентора і стійке положення в процесі його руху при ударі й відскокові, істотно зменшивши подовжні коливання. Цій же обставині сприяє зменшення зазорів між зовнішніми поверхнями знімної обойми і циліндричного бурту і вн утрішньою поверхнею каналу корпуса при сполученні зазначених конструктивних елементів по симетричним щодо подовжньої осі ділянкам. У результаті строгого напрямку руху індентора в каналі корпуса зменшуються виграти енергії, забезпечується збільшення сили удару й підвищення точності вимірювань. Наявність симетрично розташованих каналів для пропуску повітря сприяє безперешкодному відводові й перетіканню повітря при робочому и зворотному русі індентора. При русі удар у індентор, що має витягн уту форму, підтримується і центрується у хвостовій частині спеціальним опорним елементом-стабілізатором. Додатковий технічний результат - забезпечення оптимальної стійкості центрального подовжнього стержня при гарантованому центруванні індентора в каналі корпуса, досягається при виконанні його довжиною, обумовленою з врахуванням співвідношення до сумарної довжини поверхонь контакту знімної обойми й стабілізатора руху з поверхнею каналу корпуса: 3 (Lк.з.о. + Lк.с.р.) £ Lц.с. £ 5(Lк.з.о. + Lк.с.р.), де Lц.c. - довжина центрального подовжнього стержня, Lк.з.о. - довжина поверхні контакту знімної обойми, Lк.c.p - довжина поверхні контакту стабілізатора руху. Дотримання пропонованого співвідношення, крім вищевказаного додаткового технічною результату, дозволяє виконати індентор з мінімальною довжиною поверхні контакту знімної обойми й стабілізатора руху з внутрішньою поверхнею каналу корпуса, що полегшує р ух індентора у випадку порушення форми отвору каналу корпуса. Додатковий технічний результат - зменшення тертя знімної обойми і стабілізатора руху індентора об стінки каналу корпуса - досягається при виконанні зовнішнього шару матеріалу знімної обойми і стабілізатора руху індентора з фторопласта, який має низький коефіцієнт тертя при взаємодії з металом. Так коефіцієнт сухого тертя фторопласта об сталь складає 0,05-0,09 [И.В. Крачельский. И.Э. Виноградова, Коэффициент трения. М., 1962, стр.204, 205], у той час як метал об метал - 0,15-0,20. Велике значення для поліпшення динаміки руху індентора має виконання каналів для пропуску повітря, їхня форма і розташування. Так канали для прописку повітря в знімній обоймі і стабілізаторові руху утворені скосами на корпусі обойми й дугами окружності внутрішньої поверхні корпуса. Кількість симетричних ділянок сполучення й каналів для пропуску повітря в знімній обоймі і на поверхні контакту стабілізатора руху узято парним. Площі прохідних перетинів каналів для пропуску повітря в знімній обоймі і на поверхні контакту стабілізатора узяті однаковими. У зв'язку з усуненням деталі, що була в прототипі - знімної частини корпуса індентора - кулька у пропонованій конструкції твердоміра закріплена між торцевою поверхнею центрального подовжнього стержня і упорною поверхнею знімної обойми. Постійний магніт установлено всередині пен грального подовжнього стержня, що сприяє компактності індентора і не створює додаткового опору при його русі. Пропонований винахід пояснюється схематичним кресленням на якому представлені. Фіг.1 - загальний вигляд переносного електронного динамічного твердоміра, що заявляється, в поздовжньому розтині, Фіг.2 - виносний елемент А на Фіг.1, на якому представлено індентор пропонованого твердоміра в збільшеному масштабі, Фіг.3 - поперечний розгин Б-Б, Фіг.1, на якому представлено перетин знімної обойми із симетричними сполученнями й каналами для пропускання повітря, Фіг.4 - поперечний розтин В-В, Фіг.1, на якому представлено перетин стабілізатора руху із симетричними ділянками сполучення й каналами для підведення повітря, Фіг.5 - варіант виконання індентора з вузькою поверхнею контакту знімної обойми й стабілізатора руху. Пропонований винахід має наступну конструкцію. Переносний електронний динамічний твердомір містить датчик 1 (Фіг.1), у каналі 2 корпусу 3 якого розмішений ударний механізм 4, що складається з корпуса 5, у якому розташований підтиснутий пружиною 6 шток 7, який утримується кнопкою 8 і необхідний для розтискання пелюстків цанги 9, яка утримує індентор 10. На корпусі 5 ударного механізму 4 установлена пружина стискання 11. необхідна для подовжнього переміщення індентора 10, що включає базову несучу деталь, виконану у вигляді центрального подовжнього стержня 12, у передній частині якого, зверненій убік вимірюваного об'єкта, закріплена нарізним сполученням 13 безпосередньо, тобто прямо на тілі стержня, знімна обойма 14, сполучена з внутрішньою поверхнею каналу 2 корпусу 3 поверхнею контакту 15 (Фіг.2) по симетричним щодо подовжньої осі 16 ділянкам 17 (Фіг.3) з чергуванням між ними каналів для пропуску повітря 18. У задній частині центрального подовжнього стержня 12 розміщений стабілізатор руху 19, виконаний у формі циліндричного бурту, який сполучається з внутрішньою поверхнею каналу 2 корпусу 3 поверхнею контакту по симетричним щодо подовжньої осі 16 ділянкам 20 з чергуванням між ними каналів для пропускання повітря 21 (Фіг.4). Кількість симетричних ділянок сполучення 17 і каналів для пропуску повітря 18 у знімній обоймі 14 та перетину каналів для пропуску повітря 18 у знімній обоймі 14 і в стабілізаторі руху індентора 19 узято парним і дорівнює чотирьом. Канали для пропуску повітря 18 у знімній обоймі 14 і канали 21 у стабілізаторі руху індентора 19 утворені скосами 22 на корпусі знімної обойми 14, скосами 23 на корпусі стабілізатора руху індентора 19 і дугами окружності 24 і 25 внутрішньої поверхні каналу корпуса відповідно (Фіг.3, 4). Площі прохідних перетинів каналів для пропуску повітря 18 у знімній обоймі 14 і в стабілізаторі руху індентора 19 узяті однаковими. Довжина центрального подовжнього стержня 12 узята в співвідношенні до сумарної довжини поверхонь контакту знімної обойми й стабілізатора руху індентора 19 з поверхнею каналу 2 корпусу 3 з врахуванням наступної нерівності: 3 (Lк.з.о. + Lк.с.р.) £ Lц.с. £ 5(Lк.з.о. + Lк.с.р.), де Lц.c. - довжина центрального подовжнього стержня, Lк.з.о. - довжина поверхні контакту знімної обойми, Lк.c.p - довжина поверхні контакту стабілізатора руху індентора. Усічена кулька індентора 26 закріплена між торцевою поверхнею 27 (Фіг.2) центрального подовжнього стержня 12 і упорною поверхнею 28 знімної обойми 14. Постійний магніт 29 встановлений усередині центрального подовжнього стержня 12 і закріплений за допомогою бонки 30. На корпусі 2 датчика встановлена індукційна котушка 31, у якій постійним магнітом 29 збуджується сигнал, що подається на електронний блок 32 (Фіг.1). Як варіант пропонується виконання індентора з вузькими поверхнями контакту знімної обойми 14 і поверхні контакту стабілізатора руху індентора 19 (Фіг.5). Конструкція індентора, власне кажучи, аналогічна вищеописаній. Відмінністю є виконання поверхні контакту 33 знімної обойми 14 і поверхні контакту 34 стабілізатора руху індентора 19 значно меншої довжини, ніжу вищеописаному варіанті. Таке виконання полегшує центрування індентора у випадку скривлення форми каналу в корпусі і, крім того, знижує втрати на тертя при русі індентора. Значне зниження тертя поверхонь контакту індентора об внутрішню стінку каналу 2 корпуса 3 датчика досягається при виконанні зовнішнього шару 35 матеріалу знімної обойми 14 і зовнішнього шару 36 матеріалу стабілізатора руху індентора 19 із фторопласта (Фіг.2). Конструктивно зовнішні шари 33, 34 можуть бути виконані у виді кілець, що насаджені на основну частину знімної обойми й стабілізатора руху індентора, виготовлених з металу, наприклад, конструкційної сталі, або можуть бути нанесені методом напилювання на металеву основу зазначених деталей. Вимір твердості пропонованим переносним електронним динамічним твердоміром здійснюється в такий спосіб. Датчик-1 (Фіг.1) підготовляють для виміру твердості матеріалу за допомогою подовжнього переміщення індентора 10 до зачеплення останнього бонкою 30 за пелюстки цанги 9. При цьому стабілізатор руху індентора 19 стискає пружину 11, після чого датчик 1 твердоміра готовий до вимірювання твердості. Потім датчик 1 установлюють торцевою поверхнею 37 опорного кільця 38 на поверхню вимірюваного виробу і натискають кнопку 8 до упору. Відбувається переміщення штока 7, що розтискає пелюстки цанги 9. Пружина стиску 11 переміщає індентор 10 з усіченою кулькою 26, що робить удар по поверхні вимірюваного виробу. Після удару індентор 10 з кулькою 26 відскакує. При переміщенні індентора 10 і наступного його відскоку після удару котушка 31 під впливом постійного магніту 29 видає сигнал в електронний блок 32, у якому відбувається перетворення сигналу й видача показань на цифровий індикатор, по яких судять про величину обмірюваної твердості. Розглянемо більш докладно роботу індентора 10 при русі його в каналі трубки 2. При поштовху пружини 11 у торцеву поверхню стабілізатора руху індентора 19 останній починає переміщення по каналу трубки. Обпирання індентора 10 на внутрішню поверхню каналу здійснюється по поверхнях контакту 15 знімної обойми 14 і стабілізатора руху індентора 19, утворених симетрично розташованими щодо подовжньої осі 16 ділянками 17 у знімній обоймі 14 і ділянками 20 у циліндричному стабілізаторі руху індентора 19. Останній забезпечує стійке положення при русі індентора, що має подовжену форму. При русі положення усього індентора центрується, тобто забезпечується співвісність індентора з віссю каналу 2 корпусу 3. Повітря, замкнуте в обсязі каналу корпуса 2 між поверхнею вимірюваного об'єкта і торцевою передньою поверхнею знімної обойми 14, стискується індентором, що рухається до вимірюваної поверхні, і починає проходити через канали для пропуску повітря 18 у знімній обоймі 14. надходить у простір 39 каналу 2, обмежений циліндричною поверхнею центрального подовжнього стержня 12 і внутрішньою стінкою каналу, і далі проходить через канали для пропуску повітря 21 у стабілізаторі руху індентора 19, потім у задні порожнини каналу, розташовані за індентором. Наявність канатів для пропуску повітря однакового прохідного перегину і розташування їх в опорних елементах центрального подовжнього стержня 12 - знімній обоймі й стабілізаторі руху, відсутність яких-небудь виступаючих частин у просторі 39 каналу 2, сприяють зниженню тиску повітря на індентор, що р ухається, і, отже, зменшенню втрат кінетичної енергії. При варіанті виконання індентора 10 з більш вузькими поверхнями контакту 33 знімної обойми 14 і поверхні контакту 34 стабілізатора руху індентора 19 відбувається подальше зменшення втрат енергії на тертя, при цьому сила удару індентора зростає. При наявності відхилень каналу або всього індентора по прямолінійності індентор не виявляє чутливості до погрішності форми внутрішньої поверхні каналу корпуса датчика у зв'язку з незначною площадкою контакту з цією поверхнею. Рух індентора 10 зі знімною обоймою 14 і стабілізатором руху індентора 19, що виконані з зовнішніми шарами 35, 36 із фторопласта, відбувається при контакті ділянок поверхні шарів, симетричних щодо подовжньої осі датчика. При відскокові індентора після удару характер взаємодії його деталей і елементів із внутрішньою поверхнею каналу корпуса в основному аналогічний вищеописаному, проходження повітря через індентор відбувається у зворотному напрямку. Пропонований винахід пройшов успішно дослідні випробування. Збільшення сили удару в результаті поліпшення динаміки руху індентора дозволяє в деяких випадках відмовитися від попереднього зачищення поверхні випробовуваного виробу в місці удару. При цьому значно підвищується точність вимірювання твердості.
ДивитисяДодаткова інформація
Назва патенту англійськоюPortable electronic hardness meter
Автори англійськоюKolot Volodymyr Oleksandrovych, Kolot Oleksandr Volodymyrovych, Rybalko Serhii Borysovych
Назва патенту російськоюПереносной электронный твердомер
Автори російськоюКолот Владимир Александрович, Колот Александр Владимирович, Рыбалко Сергей Борисович
МПК / Мітки
МПК: G01N 3/40
Мітки: електронний, динамічний, переносний, твердомір
Код посилання
<a href="https://ua.patents.su/5-72325-perenosnijj-elektronnijj-dinamichnijj-tverdomir.html" target="_blank" rel="follow" title="База патентів України">Переносний електронний динамічний твердомір</a>
Електронний таймер, що програмується для електронного детонатора з затримкою, і електронний детонатор з затримкою
Номер патенту: 27631
Опубліковано: 15.09.2000
Автор: Гвінн Джеймс С. ІІІ
МПК: F42D 1/00, F42C 21/00
Мітки: таймер, затримкою, детонатор, електронний, детонатора, програмується, електронного
Текст:
...люючим ді о дом 4 . За р я дж ен ий конденсатор 3 джерела живлення забезпечує вхідну напругу VCC, яка використовується для живлення решти елементів схеми електронного детонатора з затримкою, включаючи електронний таймер, що програмується. Конденсатор 3 джерела живлення зв'язаний з інтегральною схемою, яка, згідно з одним з втілень винаходу, містить електронний таймер, що програмується, 5. Електронний таймер, що програм ується , місти ть в со...
Твердомір
Номер патенту: 19740
Опубліковано: 25.12.1997
Автор: Коновалов Леонід Микитович
МПК: G01N 3/40
Мітки: твердомір
Формула / Реферат:
Твердомер, содержащий скобу с кронштейном, установленные на скобе подъемный винт и узел измерения нагрузки, ползун, установленный в скобе с возможностью перемещения вдоль последней, и стол, консольно соединенный с ползуном, отличающийся тем, что соединение стола с ползуном выполнено разьемным с возможностью замены стола, а форма поверхности стола соответствует посадочной поверхности испытываемого изделия.
Вмонтований динамічний захист
Номер патенту: 22363
Опубліковано: 03.03.1998
Автори: Горожанин Юрій Георгийович, Куров Микола Костянтинович, Вакуленко Володимир Вікторович, Шангін Борис Ніконорович, Амірагов Борис Володимирович
МПК: F41H 5/00
Мітки: захист, динамічний, вмонтований
Формула / Реферат:
Встроенная динамическая защита, состоящая из верхней преграды, листа носа корпуса, боковин, образующих ячеистую конструкцию, с элементами динамической защиты в каждой ячейке, отличающая-с я тем, что боковин установлен в пазы, выполненные с наружной стороны листа носа корпуса и имеющие глубину 0,4-0,5 и ширину 1,05-1,1 толщины боковины, с фасками под сварку с двух сторон паза под углом 40-50°, а по краям боковин выполнены шипы высотой 0,5-1...
Динамічний змішувач для полімерів
Номер патенту: 36739
Опубліковано: 16.04.2001
Автори: Рожавський Володимир Григорович, Мотін Анатолій Миколайович, Красовський Володимир Валерїйович, Сівецький Володимир Іванович, Рябінін Дмитро Дмитрович
МПК: B29B 7/38
Мітки: динамічний, полімерів, змішувач
Текст:
...порожнинами отворами 24 в тілі змішувального елементу 7. Динамічний змішувач для полімерів працює таким чином. Розплав полімеру, який складається з різних компонентів, надходить крізь вхідний отвір 2 для змішування у порожнину 3, і далі - в живильну порожнину 22, яка знаходиться між поверхнею корпусу 1 і поверхнею корпусу 21 змішувального елемента 7, виконаного у вигляді циліндра, і утворена за допомогою виконаної на зовнішній поверхні 19...
Динамічний змішувач для полімерів
Номер патенту: 40844
Опубліковано: 15.08.2001
Автори: Мотін Анатолій Миколайович, Рябінін Дмитро Дмитрович, Красовський Володимир Валерійович, Рябініна Олена Дмитрівна, Сівецький Володимир Іванович, Рожавський Володимир Григорович, Шерметинський Дмитро Олександрович
МПК: B29B 7/38
Мітки: полімерів, динамічний, змішувач
Формула / Реферат:
1. Динамічний змішувач для полімерів, що містить корпус з порожниною, в якій установлено із змогою обертання вал, по внутрішній поверхні корпусу закріплено нерухомі диски із наскрізними отворами, в зазорах між якими розташовано рухомі диски із наскрізними отворами, установлено нерухомо на валу, до того ж в тілі вала і корпусу виконані отвори, виходи яких розташовано відповідно на поверхні вала і корпусу, а отвори з'єднані між собою каналами,...
Попередній патент: Установка для електроерозійного диспергування металів
Наступний патент: Екраноплан з кінцевими шайбами на крилах
Випадковий патент: Спосіб виготовлення труб