Спосіб визначення та виправлення місця нуля (місця зеніту) для приладів, що вимірюють вертикальні кути
Номер патенту: 73279
Опубліковано: 25.09.2012
Формула / Реферат
Спосіб визначення та виправлення місця нуля (місця зеніту) для приладів, що вимірюють вертикальні кути, який включає наведення горизонтального штриха сітки ниток, приведеного в робоче положення приладу, на ціль і, за необхідності, виконання виправлення положення циліндричного рівня, горизонтального штриха сітки ниток чи компенсатора, у залежності від будови приладу, який відрізняється тим, що суміщають горизонтальний штрих сітки ниток з центром відбитого власного зображення візирного пристрою (об'єктива, горизонтального штриха сітки ниток) в прямовисно встановленому плоскому дзеркальному відбивачі, який розташовують на однаковій висоті з досліджуваним приладом у вибраному напрямку вимірювання, та виконують виправлення, для чого встановлюють конструктивно-проектний відлік вертикального круга у залежності від його будови і розташування (0°00'00", 90°00'00", 180°00'00", 270°00'00"), що відповідає горизонтальному положенню візирної осі, та, за необхідності, враховують кривину Землі.
Текст
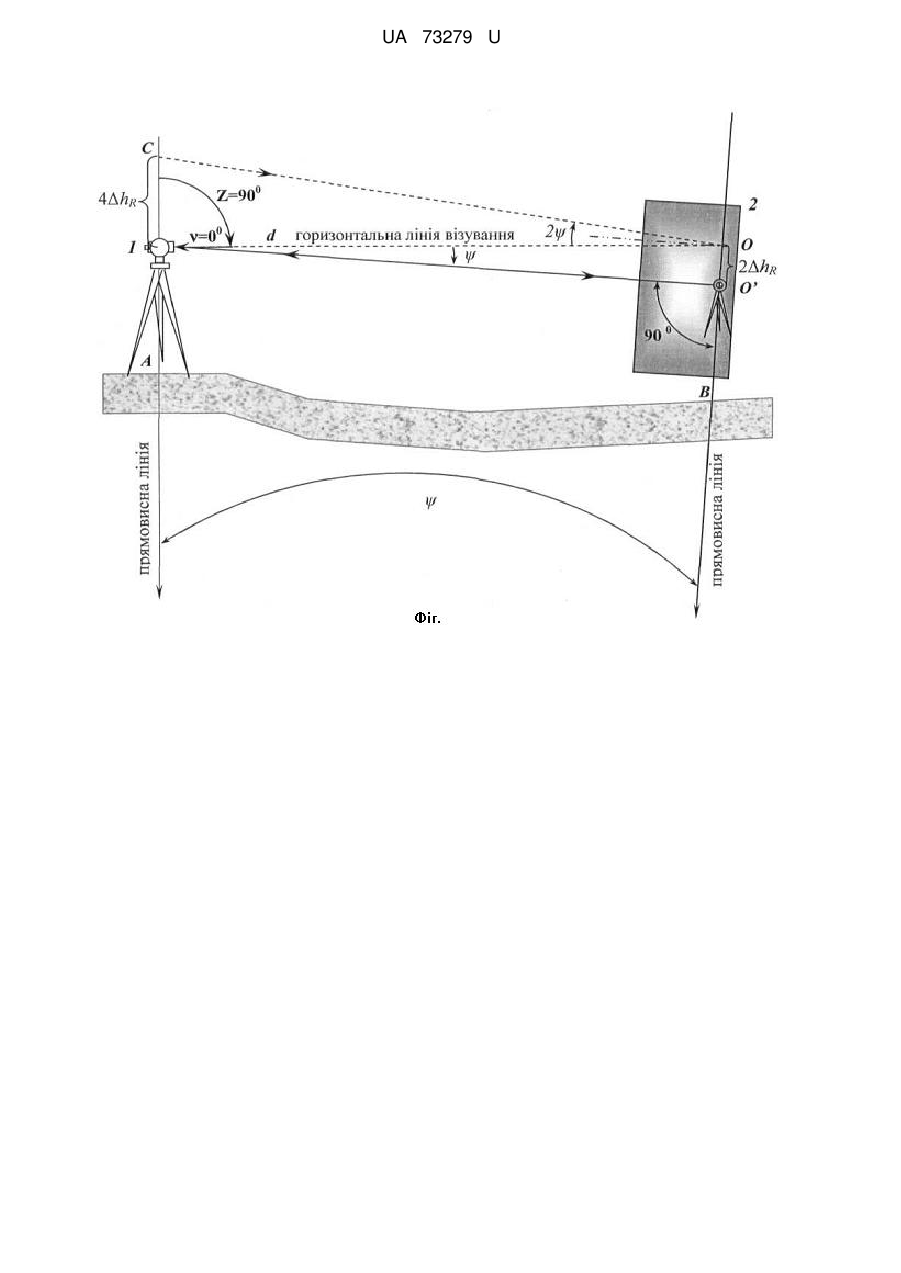
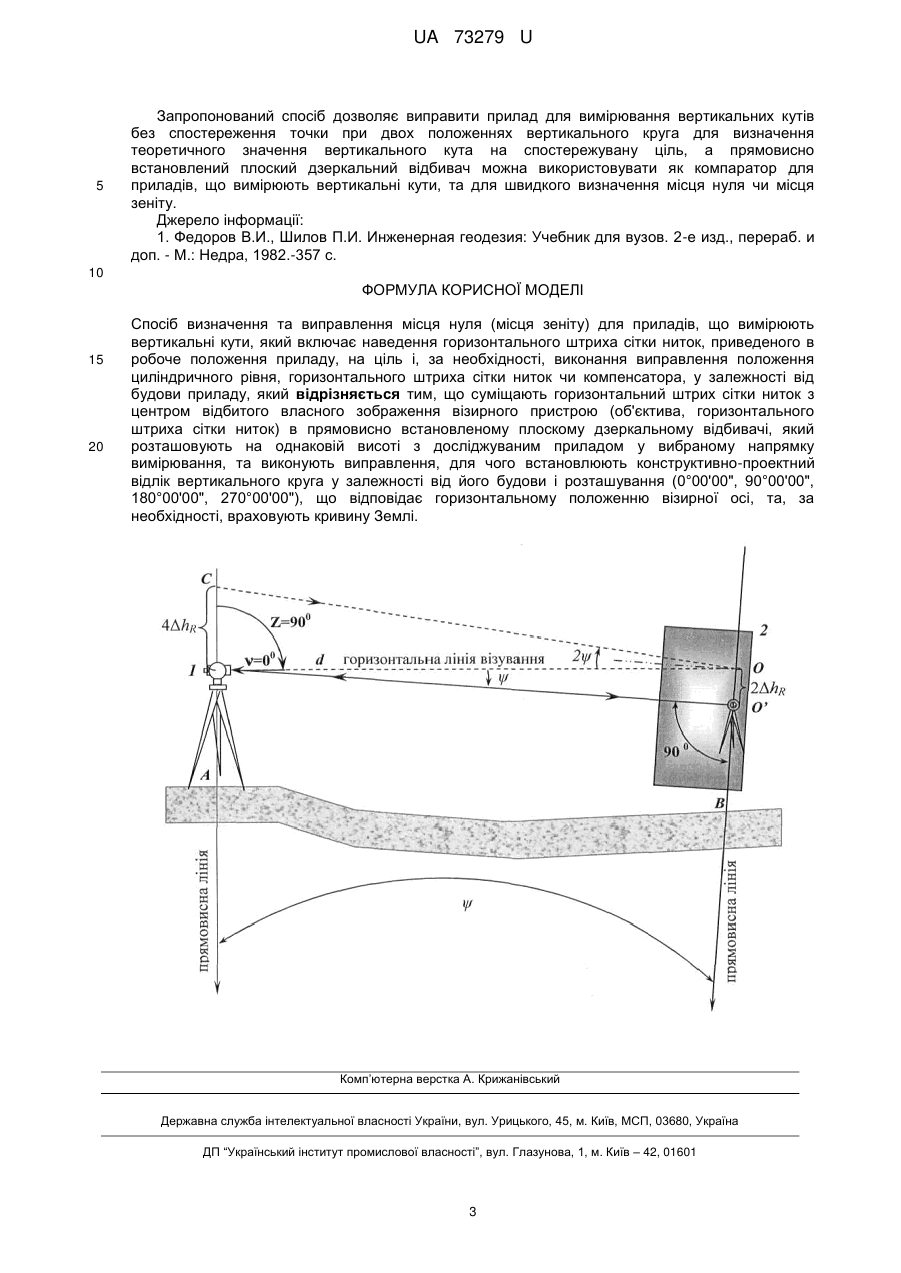
Реферат: UA 73279 U UA 73279 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до геодезичних вимірювань, а саме, до вимірювання вертикальних кутів (кутів нахилу, зенітних віддалей), і може бути використана для визначення місця нуля М0 (місця зеніту MZ) та його виправлення (юстування) для приладів, призначених для вимірювання вертикальних кутів (теодолітів, тахеометрів, екліметрів тощо). Відомий, як найближчий аналог, спосіб визначення і юстування M0 (MZ) теодоліта або тахеометра за спостереженням цілі з визначеним теоретичним значенням вертикального кута, яке знаходять, як правило, із безпосереднього спостереження цілі приладом при двох положеннях вертикального круга (круг ліворуч і праворуч), та обчислюють значення M0 (MZ). Встановивши теоретичне значення вертикального кута на вертикальному крузі на ціль, виправляють, за необхідності, положення осі візування шляхом виправлення положення циліндричного рівня або горизонтального штриха сітки ниток чи компенсатора [1]. Основним недоліком цього способу є великі затрати часу і складність технології його виконання. В основу корисної моделі поставлена задача створити спосіб визначення та виправлення місця нуля (місця зеніту) приладу, призначеного для вимірювання вертикальних кутів, без складних вимірювань для визначення теоретичного значення вертикального кута на ціль, для підвищення точності і спрощення виправлення. Поставлена задача вирішується тим, що у способі визначення та виправлення місця нуля (місця зеніту) для приладів, що вимірюють вертикальні кути, який включає наведення горизонтального штриха сітки ниток, приведеного в робоче положення приладу, на ціль і, за необхідності, виконання виправлення положення циліндричного рівня, горизонтального штриха сітки ниток чи компенсатора, у залежності від будови приладу, згідно з корисною моделлю суміщають горизонтальний штрих сітки ниток з центром відбитого власного зображення візирного пристрою (об'єктива, горизонтального штриха сітки ниток) в прямовисно встановленому плоскому дзеркальному відбивачі, який розташовують на однаковій висоті з досліджуваним приладом у вибраному напрямку вимірювання, та виконують виправлення, для чого встановлюють конструктивно-проектний відлік вертикального круга у залежності від його будови і розташування (0°00'00", 90°00'00", 180°00'00", 270°00'00"), що відповідає горизонтальному положенню візирної осі, та, за необхідності, враховують кривину Землі. Запропонована корисна модель передбачає безпосереднє наведення горизонтального штриха сітки ниток на центр зображення візирного пристрою (об'єктива або горизонтального штриха сітки ниток), яке відображається в прямовисно встановленому плоскому дзеркальному відбивачі. Корисна модель ілюструється рисунком, на якому показано хід променів з врахуванням кривини Землі, але без врахування вертикальної рефракції, де 1 - прилад, який вимірює вертикальні кути (теодоліт, тахеометр, екліметр тощо); 2 - прямовисно встановлений плоский дзеркальний відбивач. Відбите зображення центра візирного пристрою (об'єктива, горизонтального штриха сітки ниток) приладу 1, яке відображається в прямовисно встановленому плоскому дзеркальному відбивачі 2, за умови встановлення променя візування в горизонтальне положення та за відсутності впливу кривини Землі спостерігалось би в точці О. Враховуючи, що прилад 1 і відбивач 2, які розташовані на віддалі d один від одного, за рахунок кривини Землі знаходяться під центральним кутом , то відображення центра візирного пристрою (об'єктива, горизонтального штриха сітки ниток) приладу 1І спостерігають у прямовисно встановленому плоскому дзеркальному відбивачі 2 під кутом у точці О', а горизонтальний штрих сітки ниток приладу проектується в точку С. На місцевості в точці А встановлюють прилад 1, що вимірює вертикальні кути. Вибирають точку В за напрямком, по якому виконують виправлення (на відстані d≈40-50 м), і встановлюють (підвішують) прямовисно плоский відбивач 2 так, щоб відбите зображення візирного пристрою було видно в ньому. Приводять прилад 1 в робоче положення і спрямовують його на прямовисно встановлений плоский відбивач 2 так, щоб візирна вісь займала приблизно горизонтальне положення. Суміщають горизонтальний штрих сітки ниток з центром відбитого власного зображення візирного пристрою (об'єктива, горизонтального штриха сітки ниток) у прямовисно встановленому плоскому дзеркальному відбивачі 2. Проводять відлічування вертикального круга приладу 1 та порівнюють з конструктивнопроектним відліком вертикального круга, що відповідає горизонтальному положенню візирної осі і за необхідності, виконують виправлення. Для приладів, які не обладнані циліндричним рівнем при алідаді вертикального круга, за допомогою навідного гвинта зорової труби встановлюють відлік по вертикальному кругу, який 1 UA 73279 U 5 10 15 20 25 30 відповідає проектно-конструктивному значенню, коли візирна вісь займає горизонтальне положення (залежно від будови вертикального круга та його положення 0°00'00", 90°00'00", 180°00'00", 270°00'00"). Коли зображення центра візирного пристрою в плоскому прямовисно встановленому дзеркальному відбивачі зміститься з горизонтального штриха сітки ниток, проводять виправлення. Для цього переміщають горизонтальний штрих вертикально розташованими виправними гвинтами сітки ниток, домагаючись встановлення горизонтального штриха сітки ниток на центр, відбитого в прямовисному дзеркальному відбивачі зображення візирного пристрою (об'єктива, горизонтального штриха сітки ниток) приладу 1. Виправлення положення M0 (MZ) для приладів, які обладнані циліндричним рівнем при алідаді вертикального круга, виконують шляхом суміщення зображення центра візирного пристрою (об'єктива, горизонтального штриха сітки ниток) приладу 1 в плоскому прямовисно встановленому дзеркальному відбивачі з горизонтальним штрихом сітки ниток навідним гвинтом зорової труби. За допомогою навідного гвинта циліндричного рівня при алідаді вертикального круга встановлюють відлік по вертикальному кругу, який відповідає проектноконструктивному значенню, коли візирна вісь приймає горизонтальне положення (залежно від будови вертикального круга та його положення 0°00'00", 90°00'00", 180°00'00", 270°00'00"). Виправляють положення бульбашки циліндричного рівня виправними гвинтами рівня шляхом вставлення її в нуль-пункт. Для підтвердження ефективності запропонованого способу розглянемо спостереження цілі у прямовисному плоскому відбивачі 2, який встановлений на горизонтальній відстані d від приладу 1 (впливом вертикальної рефракції нехтують). Промінь від приладу 1, який встановлений в точці А, відіб'ється від плоского, прямовисно встановленого відбивача 2 в точці О' під кутом 90° і потрапить у візирний пристрій приладу 1. Цей промінь нахилений до горизонтального променя на кут ψ, оскільки прямовисно встановлений плоский відбивач 2 в точці В розташований на віддалі d від точки спостереження А, де встановлений прилад 1 для вимірювання вертикальних кутів, і за рахунок кривизни Землі утворює між цими точками центральний кут (відхиленням прямовисних ліній на коротких віддалях також нехтують). Кутову величину впливу кривизни Землі в секундах ψ" розраховують, знаючи горизонтальну d віддаль від точки спостереження А до відбивача 2, який розташований над точкою В: " 35 2hR d " " , R3 d де: R3=6 380000 м - середній радіус кривизни Землі для широт 44°-52°; ρ"=206264,8 - модуль переходу від радіан в секунди (градусна міра); ΔhR - лінійна величина впливу кривизни Землі на виміряні перевищення: hR 40 (1) d2 . 2R3 (2) Установивши прилад 1 (теодоліт, тахеометр, екліметр тощо), який призначений для вимірювання вертикальних кутів, в робоче положення, та лінію візування горизонтально, у прямовисно встановленому плоскому відбивачі 2 отримаємо зображення точки С, що на величину 4hR вище від центра об'єктива приладу 1. Під час суміщення зображення горизонтального штриха сітки ниток і центра об'єктива приладу зенітна віддаль складе: Z=90°+, (3) 45 або кут нахилу v відповідатиме: v=-. 50 (4) Кутовою величиною впливу кривизни Землі ψ" можна знехтувати, виконуючи виправлення теодолітів технічної точності, оскільки для віддалі d=50 м вона складе "=1.6". Якщо такою величиною можна знехтувати, то стверджують, що побудована лінія візування горизонтальна. Величина впливу кривизни Землі у перевищення на віддалі d=50 м складає hR=0,196 мм, то, відповідно, С1=4hR=0,78 мм. 2 UA 73279 U 5 Запропонований спосіб дозволяє виправити прилад для вимірювання вертикальних кутів без спостереження точки при двох положеннях вертикального круга для визначення теоретичного значення вертикального кута на спостережувану ціль, а прямовисно встановлений плоский дзеркальний відбивач можна використовувати як компаратор для приладів, що вимірюють вертикальні кути, та для швидкого визначення місця нуля чи місця зеніту. Джерело інформації: 1. Федоров В.И., Шилов П.И. Инженерная геодезия: Учебник для вузов. 2-е изд., перераб. и доп. - М.: Недра, 1982.-357 с. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Спосіб визначення та виправлення місця нуля (місця зеніту) для приладів, що вимірюють вертикальні кути, який включає наведення горизонтального штриха сітки ниток, приведеного в робоче положення приладу, на ціль і, за необхідності, виконання виправлення положення циліндричного рівня, горизонтального штриха сітки ниток чи компенсатора, у залежності від будови приладу, який відрізняється тим, що суміщають горизонтальний штрих сітки ниток з центром відбитого власного зображення візирного пристрою (об'єктива, горизонтального штриха сітки ниток) в прямовисно встановленому плоскому дзеркальному відбивачі, який розташовують на однаковій висоті з досліджуваним приладом у вибраному напрямку вимірювання, та виконують виправлення, для чого встановлюють конструктивно-проектний відлік вертикального круга у залежності від його будови і розташування (0°00'00", 90°00'00", 180°00'00", 270°00'00"), що відповідає горизонтальному положенню візирної осі, та, за необхідності, враховують кривину Землі. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for the determination and correction of the zero point position (zenith point) for devices that measure vertical angles
Автори англійськоюPerii Serhii Serhiiovych, Vaschenko Volodymyr Illich
Назва патенту російськоюСпособ определения и исправление места нуля (места зенита) для приборов, которые измеряют вертикальные углы
Автори російськоюПерий Сергей Сергеевич, Ващенко Владимир Ильич
МПК / Мітки
МПК: G01C 5/00
Мітки: спосіб, нуля, приладів, зеніту, кути, вимірюють, місця, визначення, вертикальні, виправлення
Код посилання
<a href="https://ua.patents.su/5-73279-sposib-viznachennya-ta-vipravlennya-miscya-nulya-miscya-zenitu-dlya-priladiv-shho-vimiryuyut-vertikalni-kuti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення та виправлення місця нуля (місця зеніту) для приладів, що вимірюють вертикальні кути</a>
Спосіб визначення та виправлення місця нуля (місця зеніту) для приладів, що вимірюють вертикальні кути
Номер патенту: 96724
Опубліковано: 25.11.2011
Автори: Перій Сергій Сергійович, Ващенко Володимир Ілліч
МПК: G01C 5/00
Мітки: приладів, вертикальні, нуля, виправлення, вимірюють, місця, визначення, зеніту, кути, спосіб
Формула / Реферат:
Спосіб визначення та виправлення місця нуля (місця зеніту) для приладів, що вимірюють вертикальні кути, який включає наведення горизонтального штриха сітки ниток, приведеного в робоче положення приладу, на ціль і, за необхідності, виконання виправлення положення циліндричного рівня, горизонтального штриха сітки ниток чи компенсатора у залежності від будови приладу, який відрізняється тим, що суміщають горизонтальний штрих сітки ниток з...
Спосіб виконання і юстування основної перевірки нівеліра
Номер патенту: 60592
Опубліковано: 25.06.2011
Автор: Перій Сергій Сергійович
МПК: G01C 5/00
Мітки: основної, юстування, перевірки, виконання, нівеліра, спосіб
Формула / Реферат:
Спосіб виконання і юстування основної перевірки нівеліра, що включає встановлення променя візування (нівелювання) горизонтально і виправлення, за необхідності, положення циліндричного рівня або горизонтального штриха сітки ниток, чи компенсатора, який відрізняється тим, що суміщують горизонтальний штрих сітки ниток за допомогою елеваційного гвинта або виправних гвинтів сітки ниток нівеліра з центром відбитого власного зображення об'єктива...
Спосіб виконання і юстирування основної перевірки нівеліра
Номер патенту: 93341
Опубліковано: 25.01.2011
Автор: Перій Сергій Сергійович
МПК: G01C 5/00
Мітки: юстирування, перевірки, основної, нівеліра, виконання, спосіб
Формула / Реферат:
Спосіб виконання і юстирування основної перевірки нівеліра, що включає встановлення променя візування (нівелювання) горизонтально і виправлення, за необхідністю, положення циліндричного рівня або горизонтального штриха сітки ниток, чи компенсатора, який відрізняється тим, що суміщають горизонтальний штрих сітки ниток за допомогою елеваційного гвинта або виправних гвинтів сітки ниток нівеліра з центром відбитого власного зображення об'єктива...
Спосіб визначення вертикальної рефракції
Номер патенту: 93647
Опубліковано: 25.02.2011
Автор: Перій Сергій Сергійович
МПК: G01C 5/00
Мітки: спосіб, визначення, вертикальної, рефракції
Формула / Реферат:
Спосіб визначення вертикальної рефракції, що включає виконання спостережень зображення шкали рейки, яка встановлена поряд з нівеліром, в прямовисному плоскому дзеркальному відбивачі, що встановлений на лінії спостереження, по якій визначають вертикальну рефракцію, який відрізняється тим, що визначають зміщення зображення шкали рейки, яка встановлена на короткій віддалі, щодо відображенням цієї ж шкали, отриманого в прямовисному плоскому...
Спосіб визначення вертикальної рефракції
Номер патенту: 60593
Опубліковано: 25.06.2011
Автор: Перій Сергій Сергійович
МПК: G01C 5/00
Мітки: визначення, вертикальної, рефракції, спосіб
Формула / Реферат:
Спосіб визначення вертикальної рефракції, що включає виконання спостережень зображення шкали рейки, яка встановлена поряд з нівеліром в прямовисному плоскому дзеркальному відбивачі, що встановлений на лінії спостереження, по якій визначають вертикальну рефракцію, який відрізняється тим, що визначають зміщення зображення шкали рейки, яка встановлена на короткій віддалі, із відображенням цієї ж шкали, отриманим в прямовисному плоскому...
Попередній патент: Спирт коньячний витриманий
Наступний патент: Спосіб екстракції свіжої рослинної сировини
Випадковий патент: Асинхронний електродвигун з короткозамкненим ротором