Спосіб визначення параметрів руху агрегату та контролю технічного стану системи керування
Номер патенту: 74121
Опубліковано: 25.10.2012
Автори: Артьомов Микола Прокопович, Ярошенко Павло Миколайович, Лебедєв Анатолій Тихонович

Формула / Реферат
Спосіб визначення параметрів руху агрегату при зміні технічного стану системи керування, який відрізняється тим, що для визначення кутів повороту напрямних коліс трактора встановлюють два датчики повороту над цапфами, лівого і правого коліс трактора, датчики закріплюють на кронштейнах, причому кронштейни фіксують на балці переднього моста за допомогою болтових з'єднань, датчики з'єднують з верхніми частинами поворотних цапф коліс трактора за допомогою штирів, а для визначення кутів повороту рульового колеса в кабіні трактора на кожусі рульової колонки вмонтовують датчик УЗП-2, а в гідролінію "нагнітання" рідини в контур рульового керування вмонтовують дросель-витратомір КИ-1097Б (ДР-70) і датчик Р910 для контролю тиску оливи.
Текст
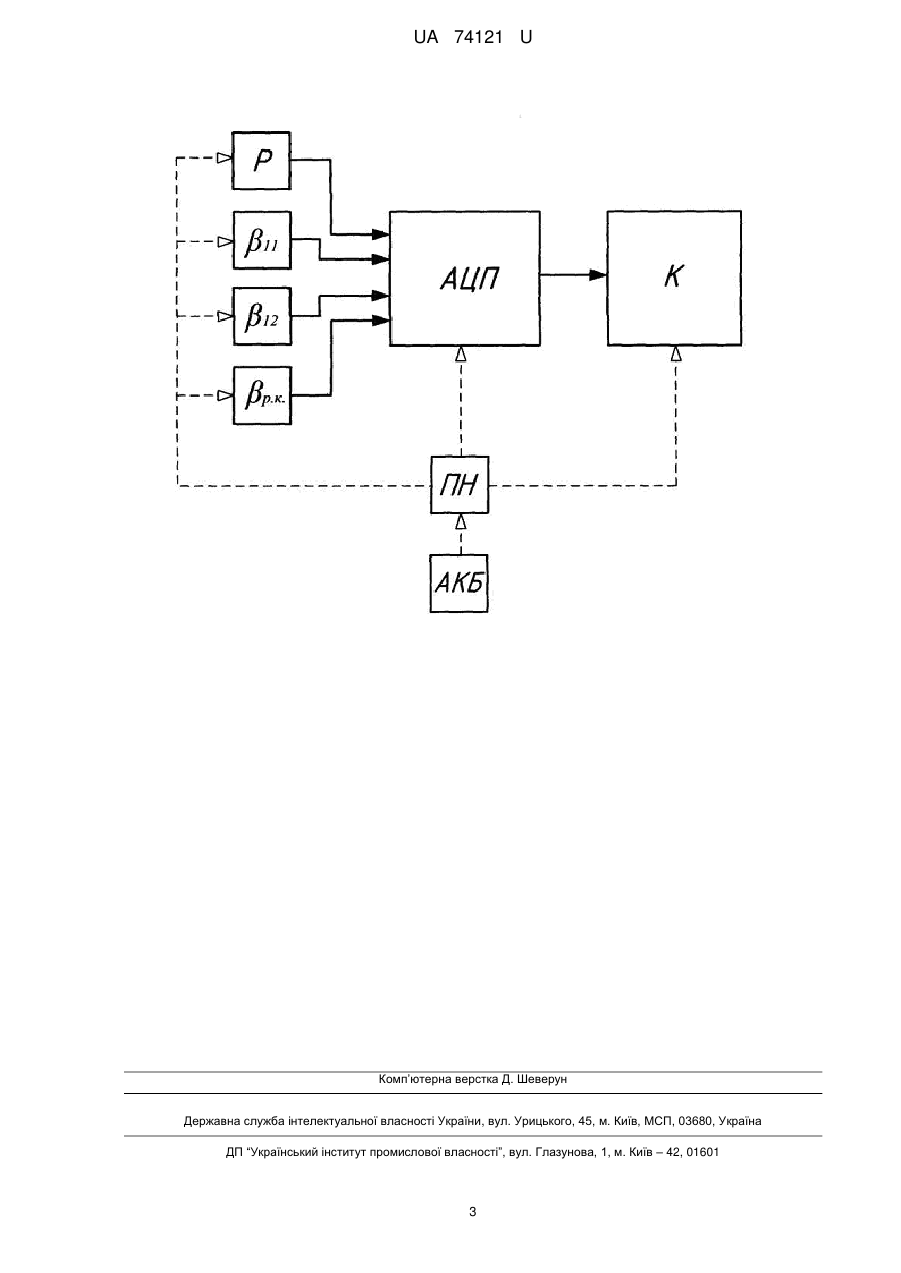
Реферат: UA 74121 U UA 74121 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі сільського господарства, а саме: до способів визначення параметрів керованого руху комбінованих машинно-тракторних агрегатів при зміні технічного стану системи керування. Вивчення зміни параметрів керованого руху машинно-тракторних агрегатів при зміні технічного стану системи керування під час виконання технологічного процесу сівби є актуальним завданням для ефективного використання машин в сільському господарстві, контролю технологічних процесів та вдосконалення існуючих і розробки нових способів визначення параметрів руху агрегатів. Найбільш близький за технологічною суттю до способу визначення параметрів керованого руху комбінованих машинно-тракторних агрегатів при зміні технічного стану системи керування, що пропонується, є спосіб контролю за траєкторією руху та витратою палива машиннотракторним агрегатом, яким за максимальним відхиленням та витратою палива при виконанні технологічного процесу прямої сівби можна зробити висновок про необхідність зміну режиму роботи, відпочинку оператора, або технічного обслуговування агрегату [Патент № 51162. Система контролю за траєкторією руху та витратою палива. Автори: Д. І. Мазоренко, А. Т. Лебедев, Μ. Π. Αртьомов, В. М. Антощенков, Р. В. Антощенков. Зареєстрований 12.07.2010 p.]. Згідно способу контролю за траєкторією руху та витратою палива машинно-тракторним агрегатом показано, що на амплітуду відхилення агрегату від прямолінійної траєкторії впливають наступні фактори: кваліфікація та втомленість водія, технічний стан елементів агрегату, швидкість руху, агрофон та інші. При проходженні агрегатом декількох проходів по полю накопичується статистична інформація в пам'яті комп'ютера про амплітуду відхилення першої піврами трактора Т-150К від прямолінійної траєкторії та витрати палива. Обчислення та накопичення статистичної інформації відбувається в мікропроцесорі, а результат виводиться на індикаторі. Дані амплітуди відхилення та траєкторії руху надходять від навігаційного пристрою GPS. Також мікропроцесор з'єднаний з датчиком для отримання інформації про витрату палива. Блок живлення перетворює бортову напругу трактора або акумуляторної батареї в напругу, необхідну для вузлів пристрою. В пам'яті пристрою фіксуються та відображаються на екрані: довжина гону, координати початку та кінця гону, витрата палива, амплітуда відхилення. При послідуючих проходах агрегату по полю на індикаторі додатково відображаються (відносно до попереднього проходу): витрата палива, довжина гону, амплітуда відхилення. Таким чином розроблений пристрій попереджає механізатора про збільшення амплітуди відхилення та довжини гону, поступового збільшення цих показників, а також про збільшення витрати палива. При появі попереджуючого сигналу тракторист повинен змінити режим руху агрегату або провести технічне обслуговування та при необхідності - ремонт елементів агрегату. До недоліків цього способу варто віднести те, що він може бути використаним на машиннотракторних агрегатах, які агрегатуються з тракторами Т-150К, або тракторами, які мають шарнірно-зчленовану раму, відсутність контролю стану системи керування, а також немалу ціну складових даної системи контролю. В основу корисної моделі поставлена задача - вдосконалити спосіб визначення параметрів керованого руху комбінованих машинно-тракторних агрегатів при зміні технічного стану системи керування та зниження ціни складових системи контролю. Поставлена корисною моделлю задача вирішується тим, що у способі визначення параметрів руху агрегату при зміні технічного стану системи керування для визначення кутів повороту напрямних коліс трактора встановлюють два датчики повороту над цапфами лівого і правого коліс трактора, датчики закріплюють на кронштейнах, причому кронштейни фіксують на балці переднього мосту за допомогою болтових з'єднань, датчики з'єднують з верхніми частинами поворотних цапф коліс трактора за допомогою штирів, а для визначення кутів повороту рульового колеса в кабіні трактора на кожусі рульової колонки вмонтовують датчик УЗП-2, а в гідролінію "нагнітання" рідини в контур рульового керування вмонтовують дросельвитратомір КИ-1097Б (ДР-70) і датчик Р910 для контролю тиску оливи. Для визначення величин зміни названих вище параметрів було зібрано контрольновимірювальний комплекс, який базувався на орно-просапному тракторі з рамною конструкцією остова, що працював у складі комбінованого посівного агрегату. На комбінованому агрегаті були встановлені датчики тиску, кутів повороту передніх напрямних коліс, кута повороту рульового колеса та контролю системи гідрооб'ємного рульового керування трактора. Витоки із гідросистеми рульового керування імітувалися за допомогою дроселя-витратоміра. Показання датчиків реєструвалися контрольно-вимірювальним комплексом, зображеним на кресленні. При проведенні досліджень особлива увага приділялась гідроприводу рульового керування для визначення впливу витоків робочої рідини на стійкість руху комбінованого посівного агрегату. 1 UA 74121 U 5 10 15 20 25 30 35 40 45 Для визначення кутів повороту β1 і β2 напрямних коліс трактора було встановлено два датчики повороту над цапфами лівого і правого коліс трактора. Датчики було закріплено на спеціально виготовлених кронштейнах, які в свою чергу були зафіксовані на балці переднього мосту за допомогою болтових з'єднань. За допомогою штирів датчики були з'єднані з верхніми частинами поворотних цапф коліс трактора. Для визначення кутів повороту рульового колеса βр.к в кабіні трактора на кожусі рульової колонки був змонтований датчик УЗП-2, який за допомогою кабелю підключався до аналогоцифрового перетворювача АЦП (MSC-1202-Y3). Для імітації витоків із системи гідрооб'ємного рульового керування в гідролінію «нагнітання» був вмонтований дросель-витратомір КИ-1097Б (ДР-70), а для контролю тиску Ρ оливи, що подається в систему керування агрегатом, поряд із дроселем було вмонтовано датчик тиску Р910. Вся інформація про стан механізму гідрооб'ємного рульового керування та його параметрів надходила через АЦП до ноутбука К («Toshiba» T3100s), який як і інші прилади мав незалежне від АКБ (акумуляторна батарея) енергопостачання через ПН (перетворювач напруги) і був встановлений в кабіні трактора. Контрольно-вимірювальний комплекс працює наступним чином. В режимі реального часу вся інформація від датчиків надходить до комп'ютера, який відтворює її на екрані, інформуючи механізатора про стан гідросистеми рульового керування та величину відхилення агрегату від заданої траєкторії руху. При відхиленні агрегату від заданої траєкторії, або виході його із технологічного коридору допусків на проведення даної операції, а також при падінні тиску в системі гідрооб'ємного рульового керування до граничного показника, вимірювальний комплекс буде попереджати механізатора про це звуковим та світловим сигналом з точним показом місця, де відбулися граничні зміни. Вся інформація про стан гідрооб'ємного рульового керування та величини відхилення агрегату від заданої траєкторії зберігається в пам'яті комп'ютера і може бути проаналізована в будь-який час. Запропонований спосіб визначення параметрів керованого руху комбінованих машиннотракторних агрегатів при зміні технічного стану системи керування є більш універсальним і дешевшим в порівнянні з існуючими способами. Він досить простий і надійний в експлуатації. Використання даного способу дозволяє значно розширити можливості контролю за технічним станом систем керування машинно-тракторних агрегатів, складених на основі як орнопросапних тракторів, так і тракторів загального призначення. Корисна модель може бути використана в сільському господарстві на агрегатах по міжрядному обробітку культур та на збиральних комплексах. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб визначення параметрів руху агрегату при зміні технічного стану системи керування, який відрізняється тим, що для визначення кутів повороту напрямних коліс трактора встановлюють два датчики повороту над цапфами лівого і правого коліс трактора, датчики закріплюють на кронштейнах, причому кронштейни фіксують на балці переднього моста за допомогою болтових з'єднань, датчики з'єднують з верхніми частинами поворотних цапф коліс трактора за допомогою штирів, а для визначення кутів повороту рульового колеса в кабіні трактора на кожусі рульової колонки вмонтовують датчик УЗП-2, а в гідролінію "нагнітання" рідини в контур рульового керування вмонтовують дросель-витратомір КИ-1097Б (ДР-70) і датчик Р910 для контролю тиску оливи. 2 UA 74121 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for the determination of machine motion parameters and steering system technical state control
Автори англійськоюLebediev Anatolii Tykhonovych, Artiomov Mykola Prokopovych, Yaroshenko Pavlo Mykolaiovych
Назва патенту російськоюСпособ определения параметров движения агрегата и контроля технического состояния системы управления
Автори російськоюЛебедев Анатолий Тихонович, Артемов Николай Прокофьевич, Ярошенко Павел Николаевич
МПК / Мітки
МПК: G05B 7/00
Мітки: спосіб, параметрів, стану, визначення, руху, керування, агрегату, технічного, контролю, системі
Код посилання
<a href="https://ua.patents.su/5-74121-sposib-viznachennya-parametriv-rukhu-agregatu-ta-kontrolyu-tekhnichnogo-stanu-sistemi-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів руху агрегату та контролю технічного стану системи керування</a>
Спосіб контролю технічного стану гальмівної системи
Номер патенту: 86975
Опубліковано: 10.06.2009
Автори: Яцько Роман Сергійович, Яцько Сергій Іванович
МПК: B60T 17/00, B61K 9/00
Мітки: стану, гальмівної, спосіб, технічного, системі, контролю
Формула / Реферат:
Спосіб контролю технічного стану гальмівної системи, який полягає в вимірі температур гальмівних колодок, їх запам'ятанні, визначенні по всій сукупності заміряних даних температур гальмівних колодок середньостатистичного значення температури і порівнянні виміряної температури кожної гальмівної колодки з цим середньостатистичним значенням, який відрізняється тим, що виявляються гальмівні підсистеми, гальмівні колодки яких мають температуру,...
Пристрій для контролю технічного стану гальмівної системи тролейбуса

Номер патенту: 64439
Опубліковано: 10.11.2011
Автори: Розводюк Михайло Петрович, Бомбик Вадим Сергійович, Устяк Леся Анатоліївна
МПК: G01M 17/00
Мітки: технічного, контролю, тролейбуса, пристрій, системі, стану, гальмівної
Формула / Реферат:
Пристрій для контролю технічного стану гальмівної системи тролейбуса, який складається з сенсора натиску педалі, електросекундоміра, блока задання нижнього рівня гальмівної сили, блока задання верхнього рівня гальмівної сили, задавача коефіцієнта інерції, задавача маси тролейбуса, першого та другого блоків множення, блока підсумовування, сенсора маси, блока віднімання, сенсора швидкості, диференціатора, блока визначення зусилля натиску,...
Спосіб визначення швидкості руху тракторного агрегату для транспортування плодів
Номер патенту: 53358
Опубліковано: 15.01.2003
Автори: Паславський Ростислав Ігорович, Миронюк Олег Сергійович, Шевчук Роман Степанович
МПК: A01D 90/00
Мітки: руху, транспортування, швидкості, спосіб, агрегату, тракторного, плодів, визначення
Формула / Реферат:
Спосіб визначення швидкості руху тракторного агрегату для транспортування плодів, що включає встановлення швидкості руху за умовами максимальної продуктивності перевезень і допустимих коливань на робочому місці тракториста-машиніста, який відрізняється тим, що додатково встановлюють швидкість руху за умовою допустимих коливань на робочій платформі агрегатованого з трактором причепа, а експлуатаційну швидкість руху агрегату вибирають як...
Пристрій для контролю технічного стану гальмівної системи тролейбуса
Номер патенту: 55922
Опубліковано: 27.12.2010
Автори: Устяк Леся Анатоліївна, Розводюк Михайло Петрович, Бомбик Вадим Сергійович
МПК: G01M 17/00
Мітки: технічного, тролейбуса, пристрій, системі, гальмівної, стану, контролю
Формула / Реферат:
Пристрій для контролю технічного стану гальмівної системи тролейбуса, який містить сенсор натиску педалі, електросекундомір, блок задання нижнього рівня гальмівної сили, блок задання верхнього рівня гальмівної сили, який відрізняється тим, що додатково містить задавач коефіцієнта інерції, задавач маси тролейбуса, перший та другий блоки множення, блок підсумовування, сенсор маси, блок віднімання, сенсор швидкості, диференціатор, блок...
Спосіб визначення технічного стану устаткування крутильної системи лінії головного приводу прокатної кліті
Номер патенту: 70137
Опубліковано: 15.09.2004
Автори: Будаква Сергій Анатолійович, Юнаков Олександр Михайлович, Вереньов Валентин Володимирович, Путнокі Олександр Юліусович, Далічук Анатолій Пантелійович, Мацко Сергій Володимирович, Борщов Олексій Вікторович
МПК: G01M 7/02
Мітки: устаткування, спосіб, приводу, крутильної, технічного, прокатної, визначення, головного, системі, кліті, стану, лінії
Формула / Реферат:
Спосіб визначення технічного стану устаткування крутильної системи лінії головного приводу прокатної кліті, за яким періодично вимірюють, щонайменше у двох точках лінії приводу, значущий вібропараметр, зв'язаний з технічним станом лінії приводу, який відрізняється тим, що вимірювання здійснюють у період захоплення заготівки валками, при цьому визначають час запізнювання реакції ділянок лінії приводу на ударне навантаження, що діє на валки і...
Попередній патент: Спосіб ультразвукового кавітаційного знезараження рідини
Наступний патент: Спосіб лікування мультифокальних атеросклеротичних уражень сонних артерій
Випадковий патент: Засіб для дезінфекції об'єктів тваринництва при туберкульозі