Нечіткий регулятор змінних діапазонів
Номер патенту: 74706
Опубліковано: 16.01.2006
Автори: Яременко Володимир Миколайович, Гостєв Володимир Іванович


Формула / Реферат
Нечіткий регулятор змінних діапазонів, що містить блок оцінки похідних помилки, перший, другий та третій виходи якого з'єднані відповідно з першим, другим та третім входами блока фазування, перший, другий та третій виходи якого з'єднані відповідно з першим, другим та третім входами блока формування логічного рішення, а блок формування логічного рішення з'єднаний з першим входом блока дефазування, який відрізняється тим, що він додатково містить блок зміни діапазону сигналів, який включає блок номерів півканалу, блок порогового пристрою, блок діапазону помилки, блок діапазону швидкості помилки, блок приросту швидкості помилки, блок діапазону вихідної величини та чотири блоки перемикачів, при цьому блок номерів підканалу перший, другий та n-й виходи якого з'єднані з другим, третім та n+1 входами блока порогового пристрою, вихід якого з'єднаний з першими входами чотирьох блоків перемикачів, перший, другий та n-й виходи блоків діапазону помилки, діапазону швидкості помилки, діапазону приросту швидкості помилки та діапазону вихідної величини з'єднані відповідно з другим, третім та n+1 входами відповідних першого, другого, третього та четвертого блоків перемикачів, виходи першого, другого та третього блоків перемикачів з'єднані відповідно з четвертим, п'ятим та шостим входами блока фазування, а вихід четвертого блока перемикача з'єднаний з другим входом блока дефазування.
Текст
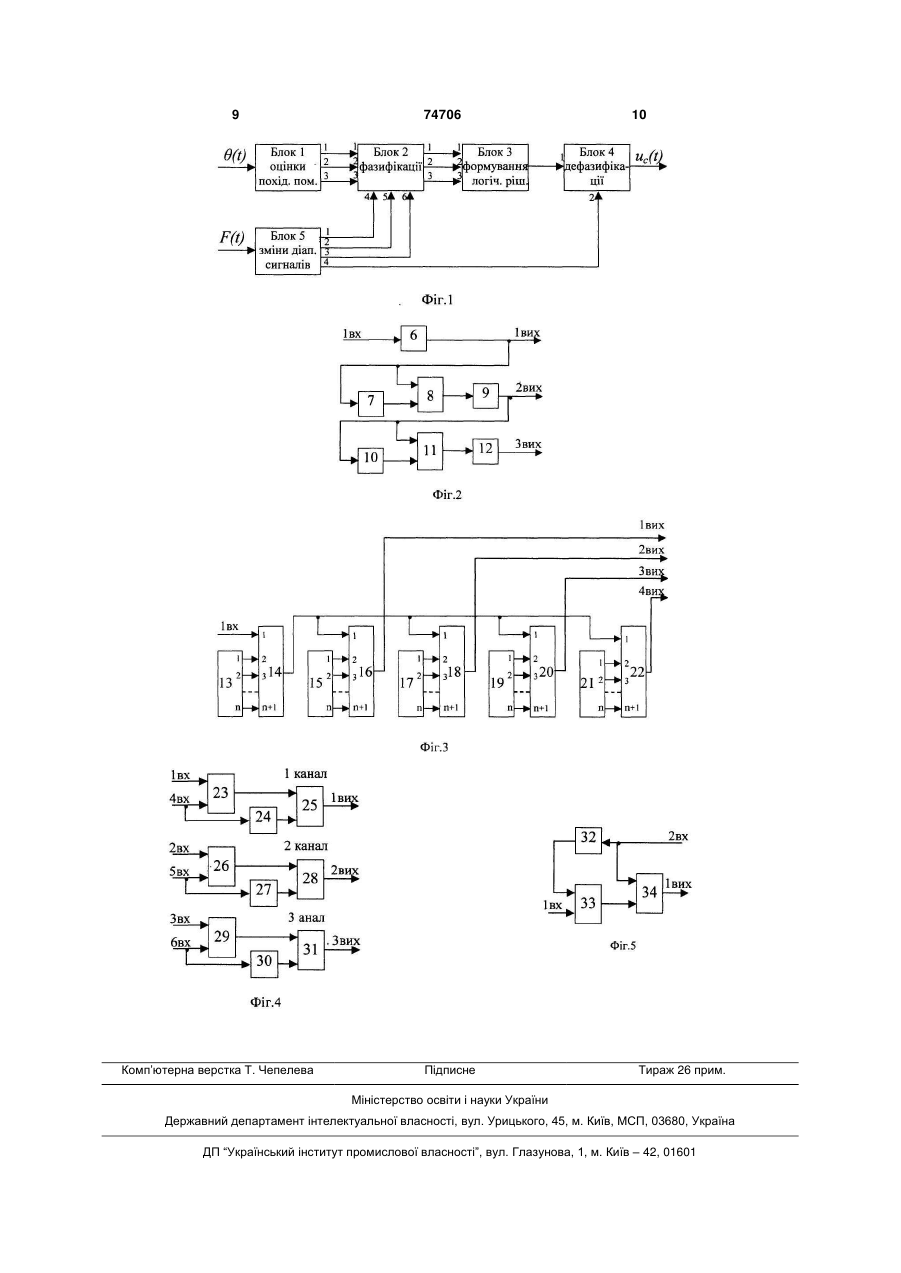
Нечіткий регулятор змінних діапазонів, що містить блок оцінки похідних помилки, перший, другий та третій виходи якого з'єднані відповідно з першим, другим та третім входами блока фазування, перший, другий та третій виходи якого з'єднані відповідно з першим, другим та третім входами блока формування логічного рішення, а блок формування логічного рішення з'єднаний з першим входом блока дефазування, який відрізня C2 1 3 74706 4 другий та третій виходи якого з'єднані відповідно з дом блока ділення. Блок віднімання з'єднаний з першим, другим та третім входами блока фазифіпершим (добуток) входом блока ділення, який обкації, перший, другий та третій виходи якого з'єдчислює частку цих сигналів. Принцип дії інших канані відповідно з першим, другим та третім входаналів аналогічні розглянутому. ми блока формування логічного рішення, а блок Блок дефазифікації складається з блока діаформування логічного рішення з'єднаний з блоком пазону, блока підсилення, блока суматора, блока дефазифікації. добутку. Блок діапазону, за допомогою якого встаБлок оцінки похідних обчислює швидкість зміновлюється діапазон вихідної величини, має фікни похибки, змінних об’єкта управління в лінгвістисоване значення, але для об'єктів керування з печні величини істинності. Блок фазифікації з'єднаремінними параметри необхідно мати змінний ний з блоком формування логічного рішення, який діапазон, внаслідок чого значно збільшується пона основі сформульованих правил (бази правил) хибка системи при відпрацюванні ступінчатого і типу ЯКЩО-ТО, здійснює формування логічного лінійно-змінного вхідного впливу. Блок діапазону рішення. Блок формування логічного рішення з'єдз'єднаний з першим входом блока-суматора та наний з блоком дефазифікації, в якому отримане блоком підсилення, який підсилює вхідний сигнал логічне рішення перетворюється в числову велиз коефіцієнтом підсилення - 2. Блок підсилення чину для управляючого впливу на об'єкт керуз'єднаний з першим входом блока добутвання. ку(обчислює добуток вхідних сигналів) на другий Блок оцінки похідних помилки складається з вхід якого поступає сигнал з блок сформування блока фіксатора, двох блоків затримки, двох блологічного рішення. Блок добутку з'єднаний з друків віднімання та двох блоків підсилення. Блок фікгим входом блока суматора, який обчислює суму сатора (фіксує похибку системи з інтервалом рецих сигналів. В результаті із логічного рішення гулювання tp=h) з'єднаний з першим входом блока отримаємо числову величину необхідного діапафазифікації, з першим блоком затримки (затримує зону для управляючого впливу на об'єкт керувхідний сигнал t3=h) та першим входом першого вання. блока-віднімання. Перший блок затримки з'єднаПід час роботи цього пристрою значно збільний з другим входом першого блока віднімання, шується похибка системи при відпрацюванні ступіякий обчислює різницю затриманого та незатринчатого і лінійно-змінного вхідного впливу в насліманого сигналів (вимірює поточне значення швиддок того, що нечіткий регулятор має фіксовані кості довільного вхідного впливу). Перший блок значення діапазонів вхідних величин (похибки, віднімання з'єднаний з першим блоком підсилення швидкості зміни похибки, прискорення похибки) та (підсилює вхідний сигнал з коефіцієнтом підсиленвихідної величини, в той час як об'єкт керування ня l/h), вихід якого з'єднаний з другим входом бломає змінні параметри. ка фазифікації, входом другого блока затримки Недоліком прототипу є недостатньо висока (затримує вхідний сигнал t3=h), та першим входом якість системи для об'єктів керування з переміндругого блока віднімання. Другий блок затримки ними параметрами, в наслідок значних похибок з'єднаний з другим входом другого блока віднісистеми при довільних вхідних сигналах. мання, який обчислює різницю затриманого та В основу винаходу поставлена задача удосконезатриманого сигналів (вимірює приріст швидкосналення нечіткого регулятора за рахунок введення ті довільного вхідного впливу). Другий блок відніблока зміни діапазону сигналу, що призведе до мання з'єднаний з другим блоком підсилення, (підзміни діапазонів вхідної і вихідної величини в засилює вхідний сигнал з коефіцієнтом підсилення лежності від зміни параметрів об'єкта керування, l/h), вихід якого з'єднаний з третім входом блока що забезпечить підвищення точності відпрацюфазифікації. вання вхідного сигналу для систем з відомими Блок фазифікації складається з трьох блоків змінними параметрами при довільних вхідних діапазонів, трьох блоків віднімання, трьох блоків впливах, а саме; відпрацюванні ступінчатого і ліпідсилення, трьох блоків ділення. Для переводу нійно-змінного вхідного впливу на систему керупоточного значення вхідних перемінних об'єкта вання. керування (похибки, швидкості похибки, приросту Поставлена задача вирішується тим, що в нешвидкості похибки) в лінгвістичні величини істинчіткий регулятор, що містить блок оцінки похідних ності використовують три ідентичні канали, які помилки; перший, другий та третій виходи якого містять відповідні блоки діапазонів, віднімання, з'єднані відповідно з першим, другим та третім підсилення, ділення. Поточне значення похибки входами блока фазифікації, перший, другий та об'єкта керування надходить на перший (додатній) третій виходи якого з'єднані відповідно з першим, вхід блока віднімання першого каналу. Блок діападругим та третім входами блока формування логізону, за допомогою якого встановлюють діапазон чного рішення, а блок формування логічного різміни похибки має фіксоване значення, але для шення з'єднаний з першим входом блока дефазиоб'єктів керування з перемінними параметрами фікації, який відрізняється тим, що він додатково необхідно мати змінний діапазон, в наслідок чого містить блок зміни діапазону сигналів, який має значно збільшується похибка системи при відпраблок номерів півканалу, блок порогового прицюванні ступінчатого і лінійно-змінного вхідного строю, блок діапазону помилки, блок швидкості впливу. Блок діапазону з'єднаний з блоком підсипомилки, блок приросту швидкості помилки, блок лення, який підсилює сигнал з коефіцієнтом підсивихідної величини та чотири блоки перемикачів, лення - 2, та другим (від'ємним) входом блока відпри цьому блок номерів підканалу, перший, другий німання, який обчислює різницю цих сигналів. та n-ий виходи якого з'єднані з другим, третім, та Блок підсилення з'єднаний з другим (частка) вхоn+1 входами блока порогового, вихід якого з'єдна 5 74706 6 ний з першими входами чотирьох блоків перемиршими входами чотирьох блоків 16, 18, 20, 22 пекачів, перший, другий та n-ий виходи блоків діапаремикачів; зонів помилки, швидкості помилки, приросту швидблок 15 діапазонів помилки перший, другий та кості помилки та вихідної величини з'єднані n-ий виходи якого з'єднані відповідно з другим, відповідно з другим, третім, та n+1 входами відпотретім, та n+1 входами блока перемикача; відних першого, другого, третього та четвертого блок 17 діапазонів швидкості помилки перший, блоків перемикачів, виходи першого, другого та другий та n-ий виходи якого з'єднані відповідно з третього блоків перемикачів з'єднані відповідно з другим, третім, та n+1 входами блока 18 перемичетвертим, п'ятим та шостим входами блока факача; зифікації, а вихід четвертого блока перемикача блок 19 діапазонів приросту швидкості помилз'єднаний з другим входом блока дефазифікації. ки перший, другий та n-ий виходи якого з'єднані Таким чином, нечіткий регулятор має не фіквідповідно з другим, третім, та n+1 входами блока сований, а змінний діапазон вхідної і вихідної ве20 перемикача; личини в залежності від зміни параметрів об'єкта, блок 21 діапазонів вихідної величини перший, що забезпечує значно меншу похибку для об'єктів другий та n-ий виходи якого з'єднані відповідно з керування з перемінними параметрами при довідругим, третім, та n+1 входами блокa 22 перемильних вхідних впливах на систему керування. кача; Суть винаходу пояснюється кресленнями де блоки 16, 18, 20 перемикачів з'єднані відповідзображені: но з четвертим, п'ятим та шостим входами блокa 2 на Фіг.1- загальна структурна схема нечіткого фазифікації; регулятора; блок 22 перемикача з'єднаний з другим вхона Фіг.2- структурна схема блока оцінки похіддом блокa 4 дефазифікації. них помилки; Фіг.4 містить: на Фіг.3- структурна схема блока зміни діапаблок 23 віднімання з'єднаний з першим входом зону сигналів; блока 25 ділення; на Фіг.4- структурна схема блока фазифікації; блок 24 підсилення, з'єднаний з другим входом на Фіг.5- структурна схема блока дефазиблока 25 ділення; фікації. блок 25 ділення, з'єднаний з першим входом Фіг.1 містить: блока фазифікації; блок 1 оцінки похідних помилки, перший, друблок 26 віднімання, з'єднаний з першим вхогий та третій виходи якого з'єднані відповідно з дом блока 28 ділення; першим, другим та третім входами блока 2 фазиблок 27 підсилення з'єднаний з другим входом фікації; блока 28 ділення; блок 2 фазифікації; перший, другий та третій блок 28 ділення, з'єднаний з другим входом виходи якого з'єднані відповідно з першим, другим блока 2 фазифікації; та третім входами блока 3 формування логічного блок 29 віднімання з'єднаний з першим входом рішення; блока 31 ділення; блок 3 формування логічного рішення, з'єднаблок 30 підсилення з'єднаний з другим входом ний з першим входом блока 4 дефазифікації; блока 31 ділення; блок 5 зміни діапазону сигналів 7 перший, друблок 31 ділення з'єднаний з третім входом гий та третій виходи якого з'єднані відповідно з блока 2 фазифікації; четвертим, п'ятим та шостим входами блока 2 фаФіг.5 містить: зифікації, а четвертий вихід з другим входом блока блок 32 підсилення, з'єднаний з першим вхо4 дефазифікації. дом блока 33 множення; Фіг.2 містить: блок 33 множення, з'єднаний з другим входом блок 6 фіксатора, з'єднаний з першим входом блока 34 суматора. блока 2 фазифікації, першим входом блока 8 відПристрій працює наступним чином: німання та з блоком 7 затримки; Вихідний сигнал з системи керування (похибка блок 7 затримки, з'єднаний з другим входом системи θ(t)) поступає на блок 6 фіксатора блока 1 блока 8 віднімання; оцінки похідних помилки Фіг.2, який фіксує похибку блок 8 віднімання з'єднаний з блоком 9 підсисистеми з інтервалом регулювання tp=h, вихід лення; блокa 6 фіксатора з'єднаний з першим входом блок 9 підсилення, з'єднаний з другим входом блока 2 фазифікації, з входом блокa 7 затримки блока 2 фазифікації, першим входом блока 11 від(затримує вхідний сигнал t3=h) та першим входом німання та з блоком 10 затримки; блокa 8 віднімання, блок 7 затримки з'єднаний з блок 10 затримки з'єднаний з другим входом другим входом блокa 8 віднімання, який обчислює блока 11 віднімання; різницю затриманого та незатриманого сигналу блок 11 віднімання, з'єднаний з блоком 12 під(вимірює поточне значення швидкості довільного силення; вхідного впливу), блок 8 віднімання з'єднаний з блок 12 підсилення, з'єднаний з третім входом блоком 9 підсилення, який підсилює вхідний сигблока 2 фазифікації. нал з коефіцієнтом підсилення l/h, вихід блока 9 Фіг.3 містить: підсилення з'єднаний з другим входом блока 2 блок 13 номерів підканалу; перший, другий та фазифікації, з входом блокa 10 затримки (затриn-ий виходи якого з'єднані з другим, третім та n+1 мує вхідний сигнал t3=h) та першим входом блокa входами блока 14 порогового пристрою; 11 віднімання, блок 10 затримки з'єднаний з друблок 14 порогового пристрою, з'єднаний з пегим входом блока 11 віднімання, який обчислює 7 74706 8 різницю затриманого та незатриманого сигналу В блоці 2 фазифікації Фіг.4 першого каналу (вимірює приріст швидкості довільного вхідного блока 23 віднімання (обчислює різницю вхідних впливу), блок 11 віднімання з'єднаний з блоком 12 сигналів) похибка системи та сигнал діапазону підсилення, який підсилює вхідний сигнал з коефіпохибки поступають відповідно на перший (додатцієнтом підсилення l/h, вихід блокa 12 підсилення ній) та другий (від'ємний) його входи, з виходу якоз'єднаний з третім входом блока 2 фазифікації. го сигнал поступає на перший (добуток) вхід блока В блоці 5 зміни діапазону сигналів Фіг.3 блок 25 ділення, сигнал діапазону похибки також посту13 номер підканалу, в елементі пам'яті якого знапає на вхід блок 24 підсилення, який підсилює вхіходиться інформація про номер підканалу, пердний сигнал з коефіцієнтом -2, з виходу блока 24 ший, другий та n-ий виходи якого з'єднані відповісигнал поступає на другий (частка) вхід блока 28 дно з другим, третім та n+1 входами блока 14 ділення (обчислює частку вхідних сигналів), з випорогового пристрою, на перший вхід якого постуходу якого похибка системи об'єкта керування пепає сигнал закону зміни параметрів з об'єкта реводиться в лінгвістичну величину істинності і управління, який в залежності від величини цього поступає на перший вхід блоку 3 формування лосигналу пропускає сигнал з відповідного виходу гічного рішення. Принцип дії другого та третього блока 13 номерів підканалу. З виходу блока 14 каналу відповідні розглянутому, з виходу яких сигсигнал поступає на перші входи блоків 16, 18, 20, нали швидкості похибки та приросту швидкості 22 перемикачів, блок 15 діапазону помилки, в похибки системи необхідного діапазону поступаелементі пам'яті якого знаходиться інформація ють відповідно на другий та третій входи блока 3 про величину діапазону помилки підканалів, перформування логічного рішення. ший, другий та n-ий виходи якого з'єднані відповіБлок 3 формування логічного рішення Фіг.1 на дно з другим, третім та n+1 входами блокa 16 пеоснові сформульованих правил (бази правил) типу ремикача, який в залежності від сигналу про номер ЯКЩО-ТО, здійснює формування логічного рішенпідканалу, поступаючий на перший вхід, пропускає ня і цей сигнал поступає на вхід блока 4 дефазина вихід блокa 16 перемикача сигнал, який містить фікації. інформацію про величину діапазону помилки відВ блоці 4 дефазифікації Фіг.5 сигнал логічного повідного підканалу, з виходу блокa 16 цей сигнал рішення поступає на другий вхід блока 33 множенпоступає на четвертий вхід блокa 2 фазифікації. ня, а сигнал діапазону вихідної величини на перБлок 17 діапазону швидкості помилки підканалу, в ший вхід блока 34 суматора та вхід блока 32 піделементі пам’яті якого знаходиться інформація силення, який підсилює вхідний сигнал з про величину діапазону швидкості помилки підкакоефіцієнтом підсилення -2. З виходу блока 32 налів, перший, другий та n-ий виходи якого з'єднапідсилення сигнал поступає на перший вхід блока ні відповідно з другим, третім та n+1 входами 33 множення, який перемножує вхідні сигнали. З блокa 18 перемикача, який в залежності від сигнавиходу блока 33 множення сигнал поступає на лу про номер підканалу, поступаючий на перший другий вхід блока 34 суматора, який сумує вхідні вхід, пропускає на вихід блока 18 перемикача сигсигнали, тобто отримане логічне рішення перетвонал, який містить інформацію про величину діапарюється в числову величину для управляючого зону швидкості помилки відповідного підканалу, з впливу на об'єкт керування. виходу блока 18 цей сигнал поступає на п'ятий В результаті отримуємо сигнал управління вхід блока 2 фазифікації. Блок 19 приросту швидзмінного діапазону, амплітуда якого враховує не кості помилки підканалу, в елементі пам’яті якого тільки похибку системи, швидкість та приріст швизнаходиться інформація про величину діапазону дкості вхідного довільного впливу, але й значення приросту швидкості помилки підканалів, перший, параметрів об'єкту керування, що забезпечує знадругий та n-ий виходи якого з'єднані відповідно з чно меншу похибку системи для об'єктів керування другим, третім та n+1 входами блокa 20 перемиказ відомим законом зміни параметрів. ча, який в залежності від сигналу про номер підкаТаким чином, заявлений пристрій не тільки заналу, поступаючий на перший вхід, пропускає на безпечує оптимальний перехідний процес (оптивихід блока 20 перемикача сигнал, який містить мальну реакцію на ступінчасте вхідне діяння), а й інформацію про величину діапазону приросту шляхом використання додаткового блока зміни швидкості помилки відповідного підканалу, з виходіапазонів вхідних і вихідної величини, що дозводу блока 20 цей сигнал поступає на шостий вхід ляє значно зменшити похибку системи автоматичблока 2 фазифікації. Блок 21 вихідного сигналу ного керування з відомими перемінними параметпідканалу, в елементі пам’яті якого знаходиться рами об'єкту керування. інформація про величину діапазону вихідного сигДжерела інформації налу підканалів, перший, другий та n-ий виходи 1. Густав О. Цифровые системы автоматизаякого з'єднані відповідно з другим, третім та n+1 ции и управления. - С-Пб.: Невский Диалект, 2001. входами блокa 22 перемикача, який в залежності - 557с. від сигналу про номер підканалу, поступаючий на 2. Изерман Р. Цифровые системы управления. перший вхід, пропускає на вихід блокa 22 переми-М: Мир, 1984. -541с. кача сигнал, який містить інформацію про величи3. Гостев В.И. Синтез нечетких регуляторов ну діапазону вихідного сигналу відповідного підкасистем автоматического управления. - К.: Радионалу, з виходу блокa 22 цей сигнал поступає на матор, -2003. - 484с. другий вхід блокa 4 дефазифікації. 9 Комп’ютерна верстка Т. Чепелева 74706 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюController with indefinite variable signal ranges
Назва патенту російськоюРегулятор с неопределенными изменяемыми диапазонами сигналов
МПК / Мітки
МПК: G05B 11/36, G05B 11/01
Мітки: регулятор, діапазонів, змінних, нечіткий
Код посилання
<a href="https://ua.patents.su/5-74706-nechitkijj-regulyator-zminnikh-diapazoniv.html" target="_blank" rel="follow" title="База патентів України">Нечіткий регулятор змінних діапазонів</a>
Цифровий регулятор
Номер патенту: 65784
Опубліковано: 15.04.2004
Автор: Гостєв Володимир Іванович
МПК: H03L 5/00
Формула / Реферат:
1. Цифровий регулятор, що містить з'єднані блок фіксатора помилки і блок вибірки, який відрізняється тим, що він додатково містить блоки формування сигналів m0, m1, m2, і блок виміру швидкості сигналу, перший та другий виходи якого з'єднані відповідно з другими та третіми входами блоків формування сигналів m0, m1, m2, вихід блока фіксатора помилки з'єднаний з першим входом блока формування сигналу m0, другий вихід блока формування сигналу та...
Регулятор напруги для силових трансформаторів
Номер патенту: 35207
Опубліковано: 15.03.2001
Автори: Львов Ілля Юрійович, Мокін Борис Іванович, Грабко Володимир Віталійович
МПК: H02P 13/00
Мітки: трансформаторів, регулятор, силових, напруги
Формула / Реферат:
1. Регулятор напруги для силових трансформаторів, що містить датчик струму, вхід якої підключений до кола струму навантаження, а вихід з'єднаний з першим входом суматора, другий вхід якого підключений до кола напруги навантаження, а перший вихід з'єднаний з першим входом блоку формування і зміни зони нечутливості, вихід якого підключений до входу блоку формування і зміни уставки напруги, вихід якого з'єднаний з входом порогового блоку, вихід...
Вимірювач потужності, повного, активного та реактивного опору, ємності, індуктивності та частоти
Номер патенту: 48459
Опубліковано: 15.08.2002
Автори: Соченко Петро Степанович, Пазюк Олексій Вячеславович, Зеленков Олександр Аврамович
МПК: G01R 27/00, G01R 27/02
Мітки: реактивного, ємності, повного, активного, вимірювач, індуктивності, частоти, потужності, опору
Формула / Реферат:
Вимірювач потужності, повного, активного та реактивного опору, ємності, індуктивності та частоти, який містить послідовно з'єднані навантаження, еталонний резистор та перший блок вимірювань, в який входять перший, другий та третій квадратори, суматор, перший, другий та третій перетворювачі, перший та другий блоки ділення, перший, другий, третій та четвертий блоки множення та перший реєстратор, причому перший вивід навантаження з'єднаний з...
Пристрій керування

Номер патенту: 65665
Опубліковано: 15.04.2004
Автори: Маранов Олександр Вікторович, Чигирин Юрій Трохимович, Чигирин Олег Трохимович
МПК: G06F 11/00
Формула / Реферат:
Пристрій керування, що складається з багаторозрядного цифрового лічильного каналу, дешифратора, схеми керування, яка включає формувач і два елементи затримки, і генератора, вихід якого з'єднано з першими входами першого багаторозрядного цифрового лічильного каналу, схеми керування і дешифратора, вихід якого з'єднано з виходом пристрою керування, вхід схеми керування через перший елемент затримки, перший формувач і другий елемент затримки...
Вимірювач потужності, повного, активного та реактивного опорів
Номер патенту: 36685
Опубліковано: 16.04.2001
Автори: Зеленков Олександр Аврамович, Соченко Петро Степанович, Пазюк Олексій Вячеславович
МПК: G01R 27/16, G01R 27/02
Мітки: активного, потужності, реактивного, вимірювач, опорів, повного
Формула / Реферат:
Вимірювач потужності, повного, активного та реактивного опорів який містить послідовно з'єднані навантаження та еталонний резистор, перший, другий та третій квадратори, суматор, перший, другий та третій перетворювачі, перший та другий блоки множення, перший блок ділення та реєстратор, причому перший вивід навантаження з'єднаний з шиною живлення і першим входом першого квадратора, другий вхід якого з'єднаний з першим входом третього квадратора...
Попередній патент: Ізолюючий дихальний апарат з хімічно зв’язаним киснем
Наступний патент: Регенеративний патрон ізолюючого дихального апарата
Випадковий патент: Спосіб визначення натуральності соків, які містять антоціани