Перетворювач переміщення
Формула / Реферат
Перетворювач переміщення, що містить магнітомодуляційну головку, розташовану біля шкали, на яку нанесено магнітні мітки з полярністю, що чергується, при цьому обмотки збудження якої підключені до формувача імпульсів збудження, перша та друга сигнальні обмотки зв'язані з першим тригером, а третя-шоста сигнальні обмотки - з другим тригером, а також містить розпізнавач напрямку руху у складі першого тригера, виходи якого підключені до першого та другого диференціюючих ланцюгів, зв'язаних з першими входами першого та другого логічних елементів І, другі входи яких з'єднані з виходами другого тригера, та реверсивний лічильник, який відрізняється тим, що застосовано додаткові маґнітомодуляційні головки, розташовані біля шкали з ноніусним співвідношенням ![]() , де
, де ![]() - відстань між суміжними магнітомодуляційними головками,
- відстань між суміжними магнітомодуляційними головками, ![]() - квант шкали,
- квант шкали, ![]() - модуль ноніусної шкали,
- модуль ноніусної шкали, ![]() - дискретність ноніуса, при цьому сигнальні обмотки додаткових магнітомодуляційних головок підключені до додаткових ідентичних розпізнавачів напрямку руху, виходи перших логічних елементів І сполучені з входами першого елемента АБО, виходи других логічних елементів І сполучені з входами другого елемента АБО, а виходи елементів АБО зв'язані з реверсивним лічильником.
- дискретність ноніуса, при цьому сигнальні обмотки додаткових магнітомодуляційних головок підключені до додаткових ідентичних розпізнавачів напрямку руху, виходи перших логічних елементів І сполучені з входами першого елемента АБО, виходи других логічних елементів І сполучені з входами другого елемента АБО, а виходи елементів АБО зв'язані з реверсивним лічильником.
Текст
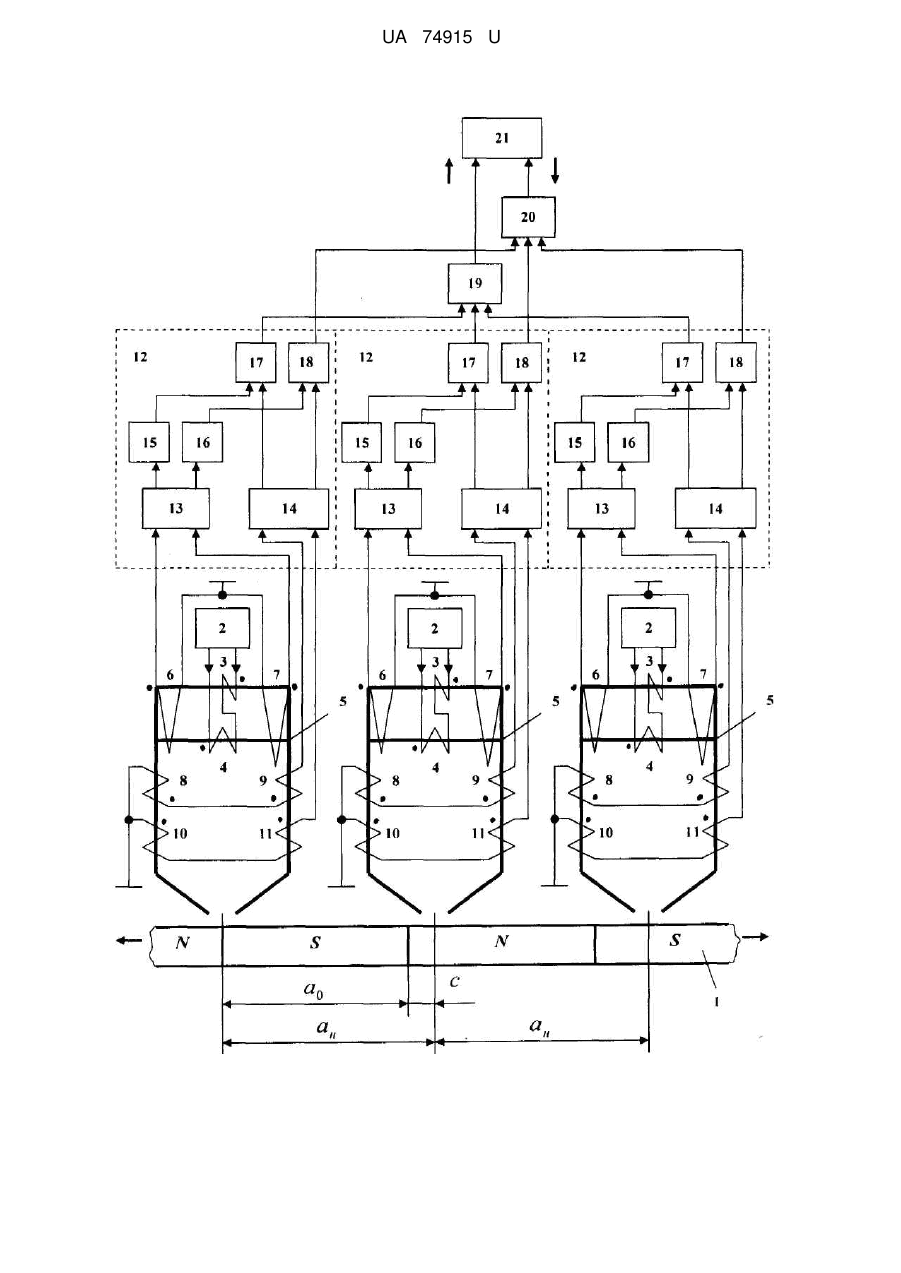
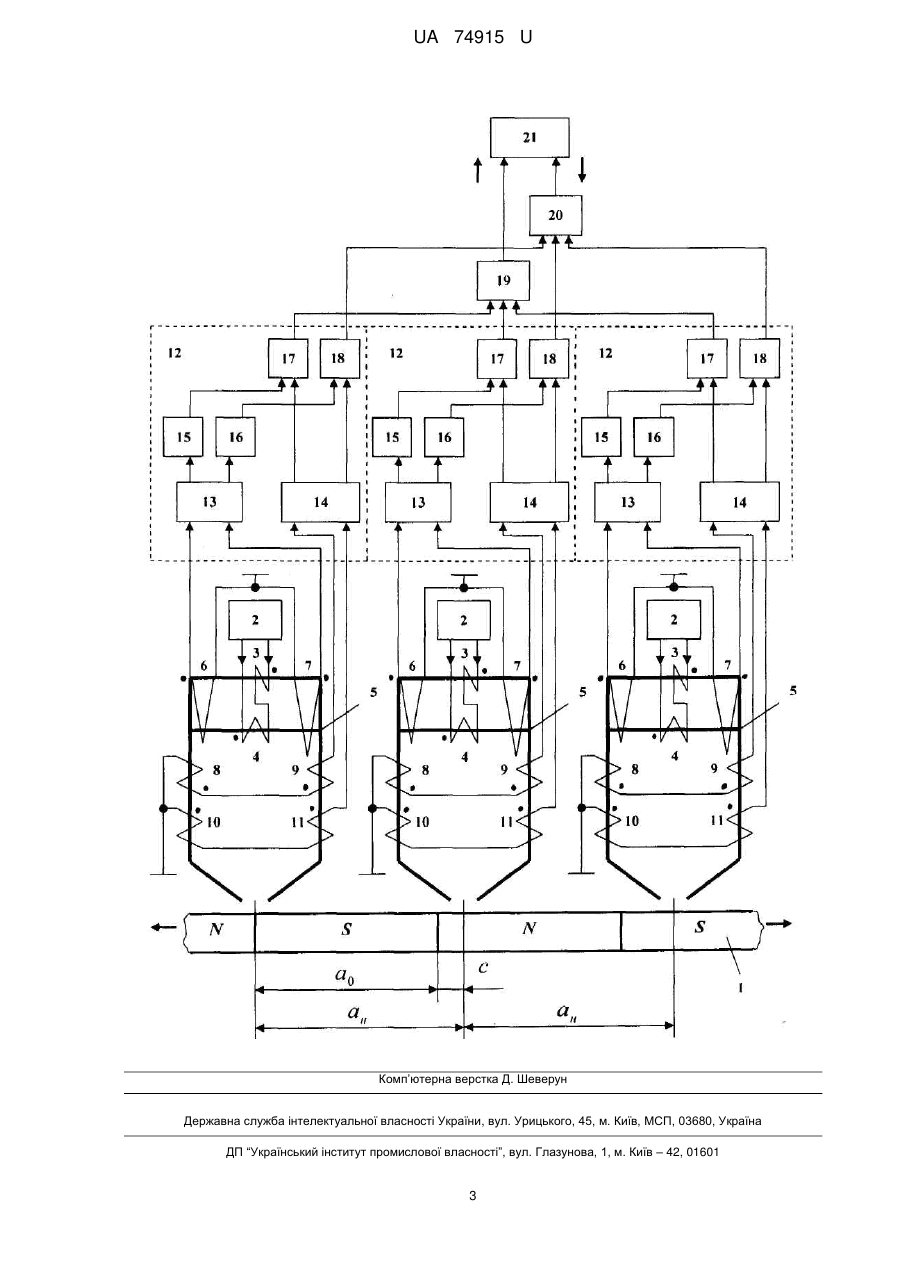
Реферат: UA 74915 U UA 74915 U 5 10 15 Корисна модель належить до інформаційно-вимірювальної техніки та може бути використана як датчики положення у пристроях для програмного управління та автоматики з реверсивним характером руху. Відомо перетворювач переміщення, що містить магнітомодуляційну головку, розташовану біля шкали, на яку нанесено магнітні мітки з полярністю, що чергується, при цьому обмотки збудження якої підключені до формувача імпульсів збудження, перша та друга сигнальні обмотки зв'язані з першим тригером, а третя-шоста сигнальні обмотки - з другим тригером, а також містить розпізнавач напрямку руху у складі першого тригера, виходи якого підключені до першого та другого диференціюючих ланцюгів, зв'язаних з першими входами першого та другого логічних елементів І, другі входи яких з'єднані з виходами другого тригера, та реверсивний лічильник [див. патент України №50565, МПК G01L 9/00, опубл. 10.06.2010, Бюл. № 11]. Цей перетворювач вибрано за найближчий аналог. Недоліком відомого перетворювача переміщення є те, що він має обмежену сферу застосування, оскільки його неможливо використовувати при ноніусному сполученні шкал. В основу корисної моделі поставлена задача вдосконалення перетворювача переміщення шляхом того, що в ньому застосовано додаткові магнітомодуляційні головки, розташовані біля шкали з ноніусним н 0 с співвідношенням 0 20 25 30 , де н відстань між суміжними магнітомодуляційними головками, - квант шкали, - модуль ноніусної шкали, с дискретність ноніуса, при цьому сигнальні обмотки додаткових магнітомодуляційних головок підключені до додаткових ідентичних розпізнавачів напрямку руху, що дозволить розширити функціональні можливості перетворювача. Поставлена задача вирішується тим, що у перетворювачі переміщення, що містить магнітомодуляційну головку, розташовану біля шкали, на яку нанесено магнітні мітки з полярністю, що чергується, при цьому обмотки збудження якої підключені до формувача імпульсів збудження, перша та друга сигнальні обмотки зв'язані з першим тригером, а третяшоста сигнальні обмотки - з другим тригером, а також містить розпізнавач напрямку руху у складі першого тригера, виходи якого підключені до першого та другого диференціюючих ланцюгів, зв'язаних з першими входами першого та другого логічних елементів І, другі входи яких з'єднані з виходами другого тригера, та реверсивний лічильник, згідно з корисною моделлю, застосовано додаткові магнітомодуляційні головки, розташовані біля шкали з ноніусним співвідношенням н 0 c , де н - відстань між суміжними магнітомодуляційними 35 40 головками, 0 - квант шкали, - модуль ноніусної шкали, с - дискретність ноніуса, при цьому сигнальні обмотки додаткових магнітомодуляційних головок підключені до додаткових ідентичних розпізнавачів напрямку руху, виходи перших логічних елементів І сполучені з входами першого елемента АБО, виходи других логічних елементів І сполучені з входами другого елемента АБО, а виходи елементів АБО зв'язані з реверсивним лічильником. Суть корисної моделі пояснюється кресленням, де зображено перетворювач переміщення, що містить шкалу 1 з магнітними мітками з полярністю, що чергується, формувачі 2 імпульсів збудження, підключені до обмоток 3, 4 збудження магнітомодуляційних головок 5, розташованих біля шкали 1, перші-шості сигнальні обмотки 6-11, розпізнавачі 12 напрямку руху у складі перших 13 та других 14 тригерів, перших 15 та других 16 диференціюючих ланцюгів, перших 17 та других 18 логічних елементів І, перший 19 та другий 20 елементи АБО та реверсивний лічильник 21. Суміжні магнітомодуляційні головки розташовані одна від одної на с 45 50 55 0 відстані, що дорівнює н , де 0 - квант шкали, - модуль ноніусної шкали, с дискретність ноніуса. Перетворювач переміщення працює наступним чином. Попередньо на шкалу 1 нанесено магнітні мітки з полярністю, що чергується. Формувачі 2 імпульсів збудження виробляють імпульси, що подаються в обмотки 3, 4 збудження магнітомодуляційних головок 5. При взаємному переміщенні їх та шкали 1 на виході сигнальних обмоток 6, 7 магнітомодуляційних головок 5 з'являються імпульси, при перевищенні порога спрацювання яких перші тригери 13 установлюються у одиничний або нульовий стан, що відповідає руху шкали 1 ліворуч або праворуч. У подальшому вихідні сигнали перших 13 тригерів через перші 15 та другі 16 диференціюючі ланцюги подаються на перші входи перших 17 та других 18 логічних елементів І. На виході сигнальних обмоток 8, 9 та 10, 11 магнітомодуляційних головок 5, включених за схемою градієнтометра, криві, що огинають імпульси, зміщені на половину елементарного кванта шкали відносно кривих, що огинають імпульси, які з'являються на виходах сигнальних обмоток 6, 7 магнітомодуляційних головок 5. Імпульси на виходах сигнальних обмоток 8, 9 та 10, 11 при перевищенні порога спрацювання установлюють другі 14 тригери у одиничний або 1 UA 74915 U 5 нульовий стан, що відповідає руху шкали 1 ліворуч або праворуч. Вихідні сигнали других 14 тригерів подаються на другі входи перших 17 та других 18 логічних елементів І, які пропускають на входи першого 19 та другого 20 елементів АБО відповідно тільки сигнали позитивної полярності, які надходять на входи реверсивного лічильника 21. При переміщенні шкали тільки одна з магнітомодуляційних головок 5 виробляє інформаційний сигнал, чим забезпечується однозначність відліку у будь-якому положенні шкали. Запропонована корисна модель, завдяки ноніусному сполученню шкали та магнітодуляційних головок, забезпечить розширення функціональних можливостей перетворювача. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Перетворювач переміщення, що містить магнітомодуляційну головку, розташовану біля шкали, на яку нанесено магнітні мітки з полярністю, що чергується, при цьому обмотки збудження якої підключені до формувача імпульсів збудження, перша та друга сигнальні обмотки зв'язані з першим тригером, а третя-шоста сигнальні обмотки - з другим тригером, а також містить розпізнавач напрямку руху у складі першого тригера, виходи якого підключені до першого та другого диференціюючих ланцюгів, зв'язаних з першими входами першого та другого логічних елементів І, другі входи яких з'єднані з виходами другого тригера, та реверсивний лічильник, який відрізняється тим, що застосовано додаткові магнітомодуляційні головки, розташовані біля шкали з ноніусним співвідношенням н 0 с , де н - відстань між суміжними магнітомодуляційними головками, 0 - квант шкали, - модуль ноніусної шкали, c дискретність ноніуса, при цьому сигнальні обмотки додаткових магнітомодуляційних головок підключені до додаткових ідентичних розпізнавачів напрямку руху, виходи перших логічних елементів І сполучені з входами першого елемента АБО, виходи других логічних елементів І сполучені з входами другого елемента АБО, а виходи елементів АБО зв'язані з реверсивним лічильником. 2 UA 74915 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюDisplacement transducer
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюПреобразователь перемещения
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01L 9/00
Мітки: перетворювач, переміщення
Код посилання
<a href="https://ua.patents.su/5-74915-peretvoryuvach-peremishhennya.html" target="_blank" rel="follow" title="База патентів України">Перетворювач переміщення</a>
Перетворювач переміщення
Номер патенту: 56824
Опубліковано: 25.01.2011
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: переміщення, перетворювач
Формула / Реферат:
Перетворювач переміщення, що містить розташовану біля шкали магнітомодуляційну головку, на яку нанесені магнітні мітки з полярністю, що чергується, при цьому обмотки збудження головки підключені до формувача імпульсів збудження, перша та друга сигнальні обмотки - зв'язані з першим тригером, а третя-шоста сигнальні обмотки - з другим тригером, а також містить розпізнавач напрямку руху у складі першого тригера, виходи якого підключені до...
Перетворювач переміщення
Номер патенту: 74868
Опубліковано: 12.11.2012
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: переміщення, перетворювач
Формула / Реферат:
Перетворювач переміщення, що містить шкалу, магнітомодуляційну головку, розташовану біля шкали, на яку нанесено магнітні мітки з полярністю, що чергується, обмотки збудження магнітомодуляційної головки підключено до формувача імпульсів збудження, її першу та другу, а також третю-шосту сигнальні обмотки, розпізнавач напрямку руху у складі першого тригера, виходи якого підключені до першого та другого диференцюючих ланцюгів, зв'язаних з...
Перетворювач переміщення
Номер патенту: 50565
Опубліковано: 10.06.2010
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: переміщення, перетворювач
Формула / Реферат:
Перетворювач переміщення, що містить шкалу, два сприймаючі органи, зміщені один відносно одного на половину елементарного кванта шкали, розпізнавач напрямку руху у складі першого тригера, виходи якого підключені до першого та другого диференціюючих ланцюгів, зв'язаних з першими входами першого та другого логічних елементів І, другі входи яких з'єднані з виходами другого тригера, та реверсивний лічильник, який відрізняється тим, що як два...
Перетворювач переміщення у код
Номер патенту: 68518
Опубліковано: 26.03.2012
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: переміщення, код, перетворювач
Формула / Реферат:
Перетворювач переміщення у код, що містить джерело напруги, підключене до формувача імпульсів збудження, на кодовому диску нанесено магнітні мітки з полярністю, що чергується, магнітомодуляційну головку, розташовану з одного боку кодового диску, обмотки збудження якої підключені до формувача імпульсів збудження, а першу та другу сигнальні обмотки якої зв'язано через фазові детектори з тригерами Шмітта, тригер пам'яті, вхід якого з'єднаний з...
Перетворювач переміщення у код
Номер патенту: 59541
Опубліковано: 25.05.2011
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: код, перетворювач, переміщення
Формула / Реферат:
Перетворювач переміщення у код, що містить джерело напруги, підключене до формувача імпульсів збудження, на кодовому диску нанесено магнітні мітки з полярністю, що чергується, магнітомодуляційну головку, розташовану з одного боку кодового диска, обмотки збудження якої підключені до формувача імпульсів збудження, а першу та другу сигнальні обмотки якої зв'язано через фазові детектори з тригерами Шмітта, тригер пам'яті, вхід якого з'єднаний з...
Попередній патент: Пристрій для визначення місцеположення рейкового рухомого об’єкта
Наступний патент: Ваговимірювальний датчик
Випадковий патент: Неінвазійний спосіб вимірювання об'єму пухлин шкіри