Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу та частоти
Номер патенту: 77093
Опубліковано: 25.01.2013
Автори: Костиря Олександр Олексійович, Коваль Юрій Олександрович, Асаад Халід Хамід, Науменко Віталій Миколайович

Формула / Реферат
Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу та частоти, відповідно до якого проводять одночасні в межах просторово-часового зсуву виміри величин зсуву в часі моментів прийому одного й того ж фрагмента сигналу відносно реперних міток часу шкал у пунктах, який відрізняється тим, що здійснюється прийом сигналу низькоорбітального чи середньоорбітального штучного супутника Землі, а часовими відліковими параметрами фрагмента прийнятого сигналу є нульові та завчасно розраховані значення допплерівського зсуву частоти прийнятого в пунктах сигналу, після чого проводиться обмін інформацією про часове положення відлікових параметрів відносно реперних міток часу шкал у пунктах, що дозволяє оцінити зсув шкал часу еталонів, а синхронізація шкал частоти здійснюється за результатами одночасних вимірів частоти сигналу супутника з урахуванням відповідних значень допплерівського зсуву частоти.
Текст
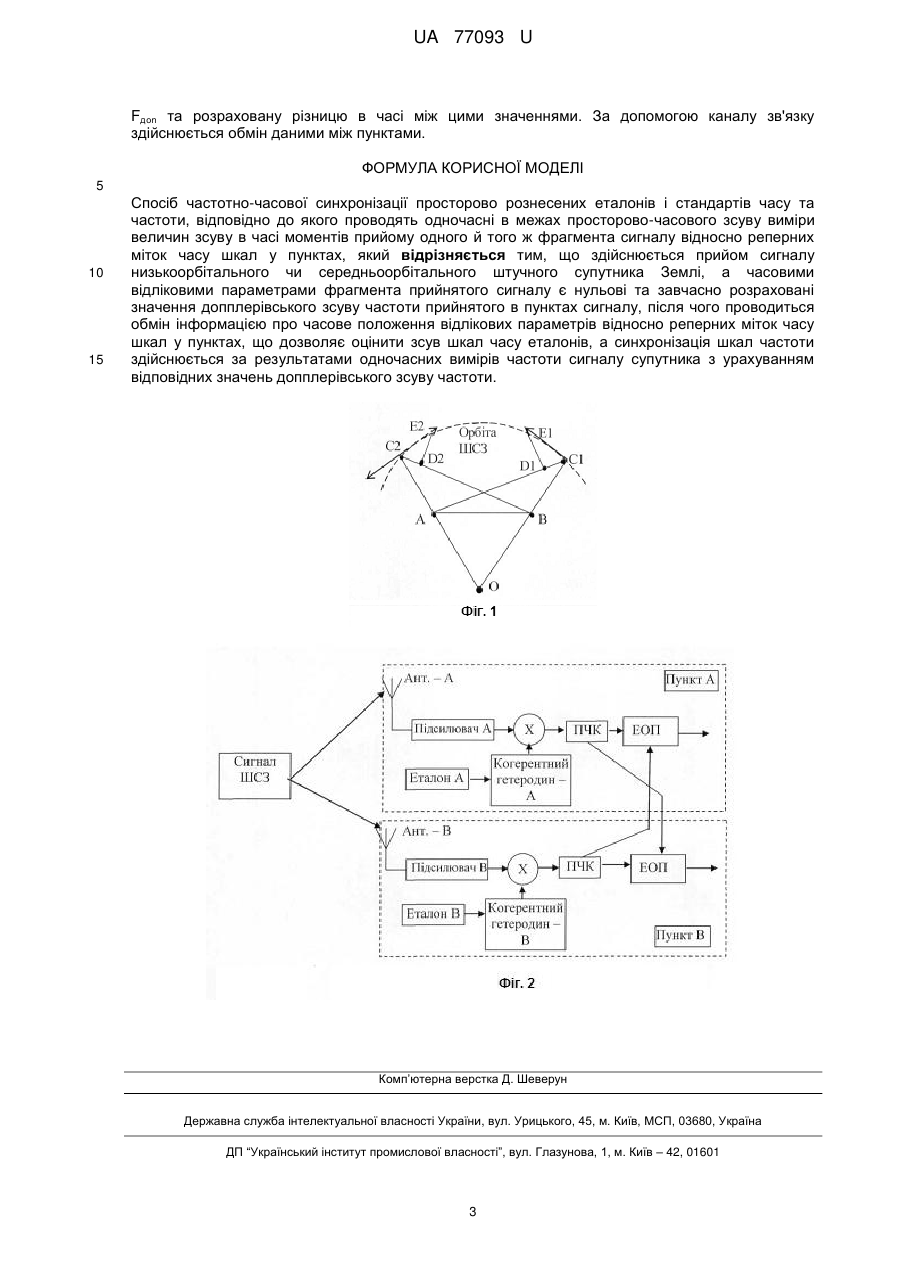
Реферат: Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу та частоти, відповідно до якого проводять одночасні в межах просторово-часового зсуву виміри величин зсуву в часі моментів прийому одного й того ж фрагмента сигналу відносно реперних міток часу шкал у пунктах. Здійснюється прийом сигналу низькоорбітального чи середньоорбітального штучного супутника Землі, після чого проводиться обмін інформацією про часове положення відлікових параметрів відносно реперних міток часу шкал у пунктах. UA 77093 U (54) СПОСІБ ЧАСТОТНО-ЧАСОВОЇ СИНХРОНІЗАЦІЇ ПРОСТОРОВО РОЗНЕСЕНИХ ЕТАЛОНІВ І СТАНДАРТІВ ЧАСУ ТА ЧАСТОТИ UA 77093 U UA 77093 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до галузі радіотехніки та метрології і призначена для частотночасової синхронізації рознесених у просторі еталонів часу та частоти. Відомий спосіб визначення місцезнаходження об'єкта за допомогою низькоорбітальних супутників зв'язку за допплерівським зсувом частоти, що реалізується шляхом визначення відстані до супутника у момент часу, коли допплерівський зсув частоти сигналу, що випромінює супутник, дорівнює нулю (Невдяев Л.М., Смирнов А.А. Персональная спутниковая связь. - М.: Эко-Трендз, 1998. - 216 с.). Даний спосіб базується на використанні високостабільних синхронізованих генераторів, що знаходяться на супутниках та на об'єкті, і не призначений для синхронізації просторово рознесених еталонів і стандартів часу та частоти. Близьким за сукупністю ознак є спосіб звірення еталонів часу та частоти з використанням сигналів супутникових радіонавігаційних систем (СРНС) GPS та ГЛОНАСС. Ці системи включають по 24 штучних супутників Землі (ШСЗ), які обертаються навколо Землі з періодом . 3 T12 год. на висоті h20 10 км, і забезпечують навігаційною та часовою інформацією споживачів у глобальному масштабі. На борту ШСЗ систем GPS та ГЛОНАСС встановлено . 3 цезієві стандарти частоти, відносна нестабільність яких за добу складає не більше 5 10 . Це дозволяє забезпечити похибку синхронізації шкал часу ШСЗ відносно шкали часу системи 15 нс при введені частотно-часових поправок два рази на добу. Для звірення у пунктах проводяться вимірювання зсуву шкал своїх еталонів відносно сигналів, прийнятих від одного із ШСЗ, та здійснюється обмін результатами вимірювань між пунктами (Гужва Ю.Г., Геворкян А.Г., Богданов ПП., Овчинников В.В. Синхронизация часов по сигналам "ГЛОНАСС". // Радионавигация и время. - 1994. - № 1(4). - с. 11-14). Цей спосіб має свої недоліки: недостатня оперативність отримання даних, відносно мале співвідношення сигнал/завада, низька завадостійкість, залежність від стану СРНС GPS або ГЛОНАСС. Найближчим за сукупністю ознак до заявленої корисної моделі є спосіб синхронізації з використанням сигналу від загального джерела телекомунікаційного геостаціонарного супутника [Коваль Ю. А. та ін. патент на корисну модель № 38167 "Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу й частоти"]. Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу й частоти, відповідно до якого проводять одночасні в межах просторово-часового зсуву виміри величин зсуву в часі моментів прийому одного й того ж фрагмента сигналу відносно реперних міток часу шкал у пунктах та надалі обчислюють значення основних параметрів взаємного ходу в пунктах, зокрема швидкість цього ходу, і змінюють значення однойменних параметрів стандартів у пунктах у бік зниження різниць їхніх значень аж до нульових, при цьому використовуваний сигнал випромінює телекомунікаційний геостаціонарний супутник, а перетворення частот при прийомі здійснюється когерентно відносно шкал частоти стандартів. Цей спосіб є найбільш близьким до того, що заявляється, але має суттєвий недолік складність обробки та визначення однакових фрагментів сигналів загального джерела. У заявленій корисній моделі використано часові відлікові особливості прийнятого сигналу, а саме моменти, коли носійна частота сигналу рухомого загального джерела має нульові та завчасно розраховані значення допплерівського зсуву частоти при прийомі сигналів загального джерела в пунктах, просторове положення яких (координати) відоме з необхідною для виконання розрахунків точністю. Часовому положенню моменту нульового допплерівського зсуву носійної частоти в одному пункті відповідає момент часу, коли носійна частота сигналу загального джерела в іншому пункті має відомий, завчасно розрахований зсув. Як відомо, суть ефекту Допплера полягає у зміні довжини хвилі радіосигналу, що випромінюється рухомим об'єктом (в даному випадку ШСЗ), при прийомі радіосигналу у нерухомому чи рухомому пункті. Якщо об'єкт наближається до нерухомого пункту, довжина хвилі прийнятого сигналу зменшується (у чисельнику знак "мінус") і збільшується (у чисельнику знак "плюс"), коли об'єкт віддаляється: cV , f0 де с - швидкість розповсюдження радіохвиль; V - швидкість об'єкта; f0 - частота сигналу, що випромінює об'єкт. Частота прийнятого в пункті сигналу f 55 c 1 f0 . (1 V / c ) Допплерівський зсув частоти визначимо як 1 UA 77093 U Fдоп f0 f f0 f V 1 f0 0 . 1 V / c cV Враховуючи, що с >> V, отримуємо: Fдоп 5 f0 V V , c де - довжина хвилі носійної частоти сигналу ШСЗ. Це максимальне значення допплерівського зсуву і має місце у випадку, коли напрям вектора швидкості об'єкта співпадає з напрямом на пункт прийому сигналу. У разі довільної траєкторії руху об'єкта частота Допплера визначається проекцією його вектора швидкості на лінію, що сполучає об'єкт з пунктом прийому сигналу. Ця проекція визначається, як радіальна швидкість об'єкта Vr , а тому: 10 15 20 25 Fдоп Vr / . (1) На фіг. 1 зображено геометричну побудову, яка поясняє принцип реалізації заявленого способу. На фіг. 2 зображена структурна схема пристрою, який реалізує заявлений спосіб. Для спрощення геометричних та математичних викладок вважаємо, що пункти А та В, де розміщені еталони часу та частоти, розташовані на однаковій висоті над рівнем моря в площині орбіти супутника, тобто точки орбіти, пунктів та центру Землі знаходяться в одній площині. Фіг. 1 відображає відносне розташування загального джерела і прийомних пунктів синхронізації А і В та визначення відлікових моментів. Із аналізу геометричної побудови фіг. 1 приходимо до висновку, що трикутники АВС1=АВС2, а також трикутники C1E1D1=C2E2D2, а значить C2D2=C1D1=Vpaд, тобто, коли ШСЗ знаходиться в точці С1, його радіальна швидкість відносно пункту В дорівнює нулю, а відносно пункту А маємо Vpaд. Після переміщення ШСЗ в точку С2 він має відносно пункту А нульову радіальну швидкість, а відносно пункту В - Vpaд зі зворотним знаком. Оскільки між радіальною швидкістю та допплерівським зсувом частоти існує пропорційна залежність (1), то позиції ШСЗ на орбіті С1 і С2 відносно пунктів А та В є особливими, оскільки моменти часу, коли ШСЗ займає ці позиції, можуть бути відліковими для визначення зсуву шкал часу еталонів, які знаходяться в цих пунктах. Щоб визначити моменту часу, коли Fдоn набуває відлікових значень, використовується співвідношення: Fдоn ( t ) 30 40 45 50 2 2 R 0 V0 t 2 2 V0 t , R 0 (2) де V0 - швидкість ШСЗ у момент, коли відстань від нього до пункту мінімальна і дорівнює R0. Для цього вирішуємо (2) відносно часу t 35 2 V0 t R0Fдоn ( t ) 2 V0 . У загальному випадку мінімальна відстань R0 від ШСЗ до пунктів може відрізнятися, а також пункти можуть знаходитися не в площині орбіти ШСЗ. Тому, коли допплерівська частота в одному з пунктів дорівнює нулю, відповідне значення одночасного виміру Fдоn в іншому пункті для кожного з пунктів відрізняється. При відомих координатах пунктів та параметрах руху ШСЗ зміна Fдоn в часі для кожного з пунктів може бути вирахувана заздалегідь. І при нульових допплерівських зсувах носійної частоти прийнятих в пунктах сигналів відповідні одночасні виміри в іншому пункті дають значення частоти Допплера, які завчасно вираховуються. Інформація про моменти часу, коли Fдоn дорівнює відліковим значенням, використовується для звірення шкал часу пунктів, а за одночасними вимірами частоти сигналу ШСЗ з урахуванням відповідних значень Fдоn оцінюється розбіжність шкал частоти пунктів. Структурна схема системи частотно-часової синхронізації просторово рознесених еталонів і стандартів часу та частоти зображена на фіг. 2, де, крім очевидних, прийняті позначення: 0 перемножувач; ПЧК - перетворювач частота-код; ЕОП - електронний обчислювальний пристрій. Принцип роботи системи частотно-часової синхронізації фіг. 2 полягає у наступному. В пунктах А та В здійснюється прийом радіосигналу, що випромінюється низько- чи середньоорбітальним ШСЗ. З приймальної антени сигнал потрапляє в підсилювач, а потім на перемножувач, на другий вхід якого подається сигнал від гетеродина, когерентного коливанням еталону часу та частоти. На виході перемножувача виділяється сигнал проміжної частоти, який надходить на перетворювач частота-код (цифровий вимірювач частоти). Дані про виміри частоти та час проведення вимірів фіксуються в електронно-обчислювальному пристрої (персональній обчислювальній машині), в якому також знаходяться дані про відлікові значення 2 UA 77093 U Fдоn та розраховану різницю в часі між цими значеннями. За допомогою каналу зв'язку здійснюється обмін даними між пунктами. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу та частоти, відповідно до якого проводять одночасні в межах просторово-часового зсуву виміри величин зсуву в часі моментів прийому одного й того ж фрагмента сигналу відносно реперних міток часу шкал у пунктах, який відрізняється тим, що здійснюється прийом сигналу низькоорбітального чи середньоорбітального штучного супутника Землі, а часовими відліковими параметрами фрагмента прийнятого сигналу є нульові та завчасно розраховані значення допплерівського зсуву частоти прийнятого в пунктах сигналу, після чого проводиться обмін інформацією про часове положення відлікових параметрів відносно реперних міток часу шкал у пунктах, що дозволяє оцінити зсув шкал часу еталонів, а синхронізація шкал частоти здійснюється за результатами одночасних вимірів частоти сигналу супутника з урахуванням відповідних значень допплерівського зсуву частоти. Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for frequency and time synchronization of spatially separated time and frequency standards
Автори англійськоюKoval Yurii Oleksandrovych, Kostyria Oleksandr Oleksiiovych, Naumenko Vitalii Mykolaiovych, Asaad Khalid Khamid
Назва патенту російськоюСпособ частотно-временной синхронизации пространственно разнесенных эталонов и стандартов времени и частоты
Автори російськоюКоваль Юрий Александрович, Костиря Александр Алексеевич, Науменко Виталий Николаевич, Асаад Халид Хамид
МПК / Мітки
МПК: G04G 7/00
Мітки: просторової, спосіб, частотно-часової, часу, рознесених, частоти, синхронізації, стандартів, еталонів
Код посилання
<a href="https://ua.patents.su/5-77093-sposib-chastotno-chasovo-sinkhronizaci-prostorovo-roznesenikh-etaloniv-i-standartiv-chasu-ta-chastoti.html" target="_blank" rel="follow" title="База патентів України">Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу та частоти</a>
Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу і частоти
Номер патенту: 38167
Опубліковано: 25.12.2008
Автори: Коваль Юрій Олександрович, Іванова Олена Олександрівна, Нестеренко Георгій Вікторович
МПК: G04G 7/00
Мітки: стандартів, спосіб, еталонів, просторової, частоти, частотно-часової, часу, синхронізації, рознесених
Формула / Реферат:
Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу і частоти, відповідно до якого проводять одночасні в межах просторово-часового зсуву виміри величин зсуву в часі моментів прийому одного й того ж фрагменту сигналу відносно реперних міток часу шкал у пунктах, який відрізняється тим, що надалі обчислюють значення основних параметрів взаємного ходу в пунктах, зокрема швидкість цього ходу, і змінюють значення...
Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу й частоти
Номер патенту: 76698
Опубліковано: 10.01.2013
Автори: Костиря Олександр Олексійович, Коваль Юрій Олександрович, Приймак В'ячеслав Юрійович, Хусейн Акрам Фатхи
МПК: G04G 7/00
Мітки: часу, частоти, рознесених, частотно-часової, еталонів, просторової, спосіб, синхронізації, стандартів
Формула / Реферат:
Спосіб частотно-часової синхронізації просторово-рознесених еталонів часу й частоти, відповідно до якого проводять одночасні виміри величин зсуву в часі моментів прийому одного й того ж фрагменту сигналу геостаціонарного супутника відносно шкали часу еталонів у пунктах, який відрізняється тим, що здійснюють прийом когерентного GPS-подібного сигналу геостаціонарного супутника системи SBAS направленими антенами, ширину діаграм спрямованості...
Спосіб звіряння просторово-рознесених еталонів часу і частоти
Номер патенту: 54198
Опубліковано: 17.02.2003
Автори: Коваль Юрій Олександрович, Нестеренко Георгій Вікторович, Антіпов Іван Євгенович, Бавикіна Вероніка Всеволодівна
МПК: G04G 7/00
Мітки: частоти, часу, звіряння, спосіб, просторово-рознесених, еталонів
Формула / Реферат:
Спосіб звіряння просторово-рознесених еталонів часу і частоти, який полягає у використанні еталонних сигналів часу і частоти, що передаються у складі сигналу телевізійного мовлення і приймаються по метеорному каналу, який відрізняється тим, що довжину метеорної траси обчислюють з використанням даних про висоту метеорного сліду, одержуваних пасивним різницево-далекомірним методом у пункті прийому.
Спосіб звіряння просторо-рознесених еталонів часу та частоти
Номер патенту: 37929
Опубліковано: 15.05.2001
Автори: Коваль Юрій Олександрович, Нестеренко Георгій Вікторович, Трощін Олег Леонідович, Антіпов Іван Євгенович
МПК: G04G 7/00
Мітки: часу, просторо-рознесених, спосіб, частоти, звіряння, еталонів
Текст:
...з елементом пам'яті 7, вихід обчислювального пристрою 6 з'єднаний з підсумувачем 8, вихід якого є виходом пристрою в цілому. Спосіб може бути реалізований наступним чином. Для визначення довжини траси L, крім відстані d, необхідно знати місце розташування метеорного сліду М, через який здійснюється прийом. Для цього в пункті приймання встановлюєть ся фазовий кутомір, який являє собою п'ять просторо-рознесених антен. Вимірювання куту між...
Спосіб звірення рознесених шкал еталонів часу
Номер патенту: 42429
Опубліковано: 15.10.2001
Автори: Бавикіна Вероніка Всеволодовна, Коваль Юрій Олександрович
МПК: G04C 11/00
Мітки: еталонів, часу, рознесених, шкал, звірення, спосіб
Формула / Реферат:
Спосіб звірення рознесених шкал еталонів часу, відповідно до якого формують опорні шкали часу, зсунені у веденому пункті на t0, а в головному пункті - на 2t0, випромінюють сигнал головного пункту, приймають цей сигнал у веденому пункті і ретранслюють його відносно опорної шкали з затримкою, яка дорівнює часу випередження прийнятим сигналом опорної шкали, приймають у головному пункті ретрансльований із затримкою сигнал із веденого пункту і...
Попередній патент: Змішувач-диспергатор
Наступний патент: Пристрій для визначення витрат палива та видалення повітря з паливної системи двигуна
Випадковий патент: Спосіб та композиція для обробки насіння