Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу й частоти
Номер патенту: 76698
Опубліковано: 10.01.2013
Автори: Коваль Юрій Олександрович, Хусейн Акрам Фатхи, Костиря Олександр Олексійович, Приймак В'ячеслав Юрійович

Формула / Реферат
Спосіб частотно-часової синхронізації просторово-рознесених еталонів часу й частоти, відповідно до якого проводять одночасні виміри величин зсуву в часі моментів прийому одного й того ж фрагменту сигналу геостаціонарного супутника відносно шкали часу еталонів у пунктах, який відрізняється тим, що здійснюють прийом когерентного GPS-подібного сигналу геостаціонарного супутника системи SBAS направленими антенами, ширину діаграм спрямованості яких вибирають із умов, щоб при нутаціях геостаціонарний супутник не виходив за їх межі, далі у кожному із пунктів, де розміщені еталони, здійснюють квадратурну обробку прийнятої суміші сигналу і завад в поєднанні із взаємокореляційною обробкою в кожному каналі із прив'язаним до шкали еталону відеосигналом, код якого співпадає із кодом сигналу супутника, та визначають час затримки сигналу по її обвідній та фазі, що дозволяє, після обміну результатами вимірів, оцінити зсув шкал еталонів із урахуванням різниці затримок сигналу супутника до пунктів, що викликана геометричним розташуванням еталонів та супутника, його нутацією, різницею затримок сигналів в апаратурі пунктів, а також параметрами іоносфери та тропосфери на трасах поширення радіохвиль.
Текст
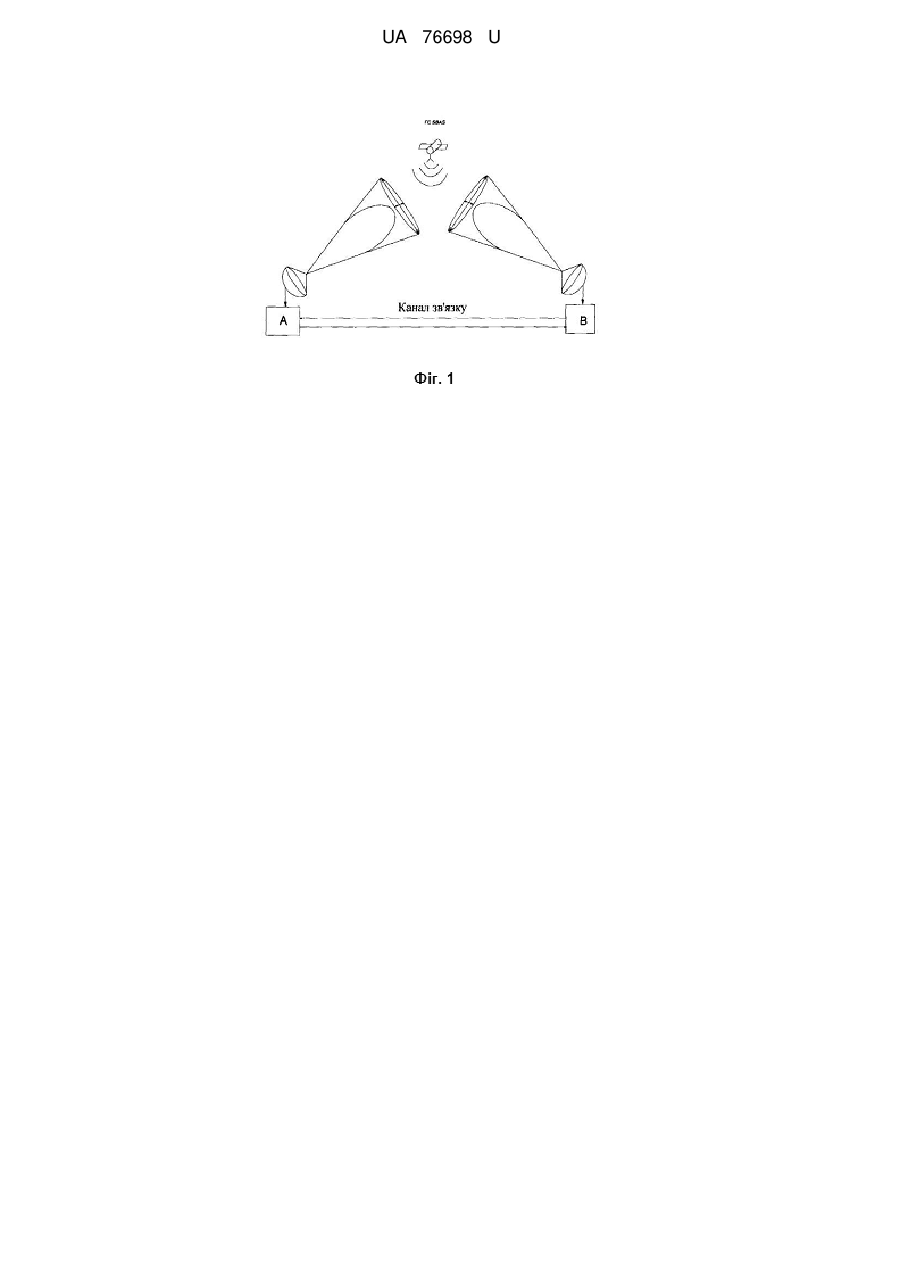
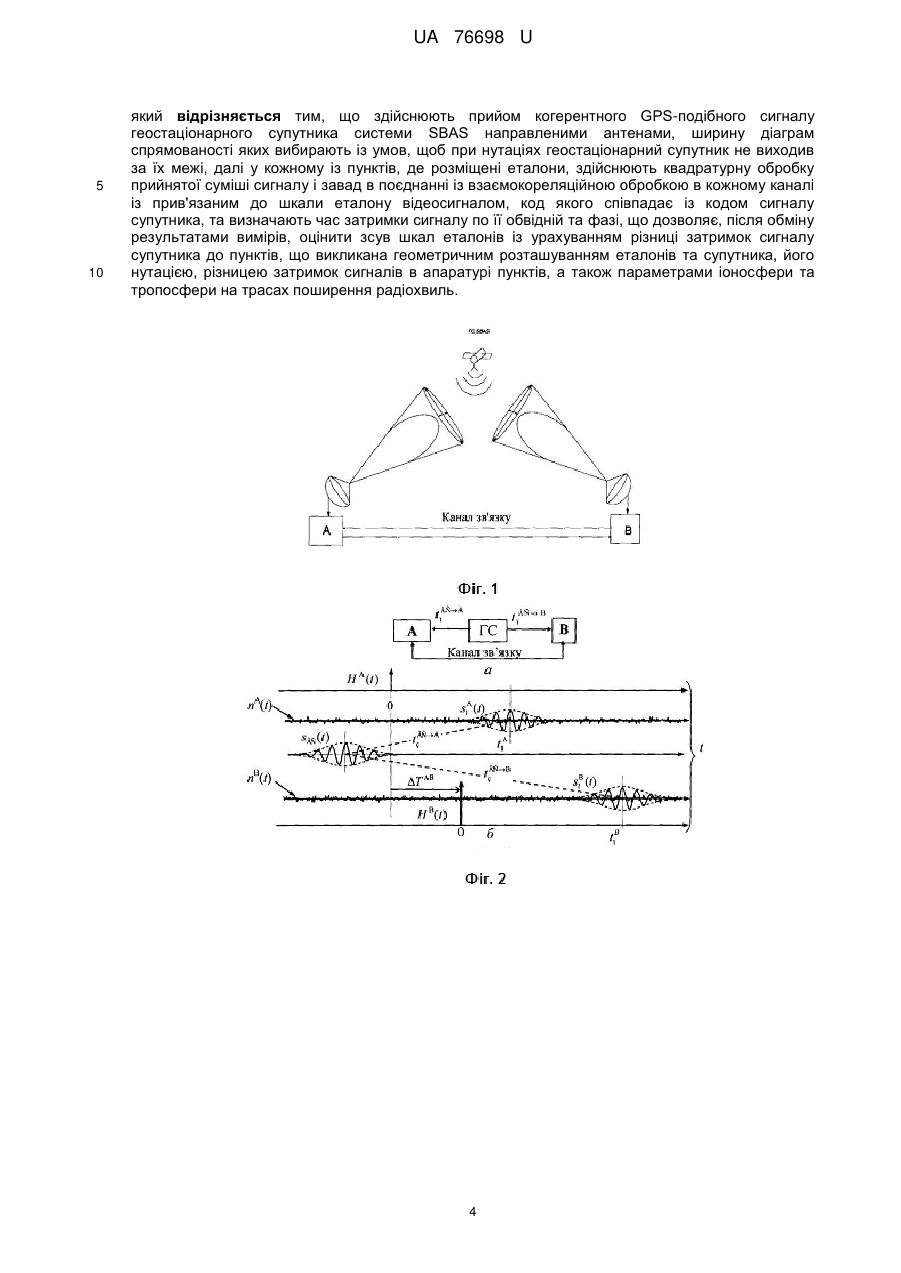
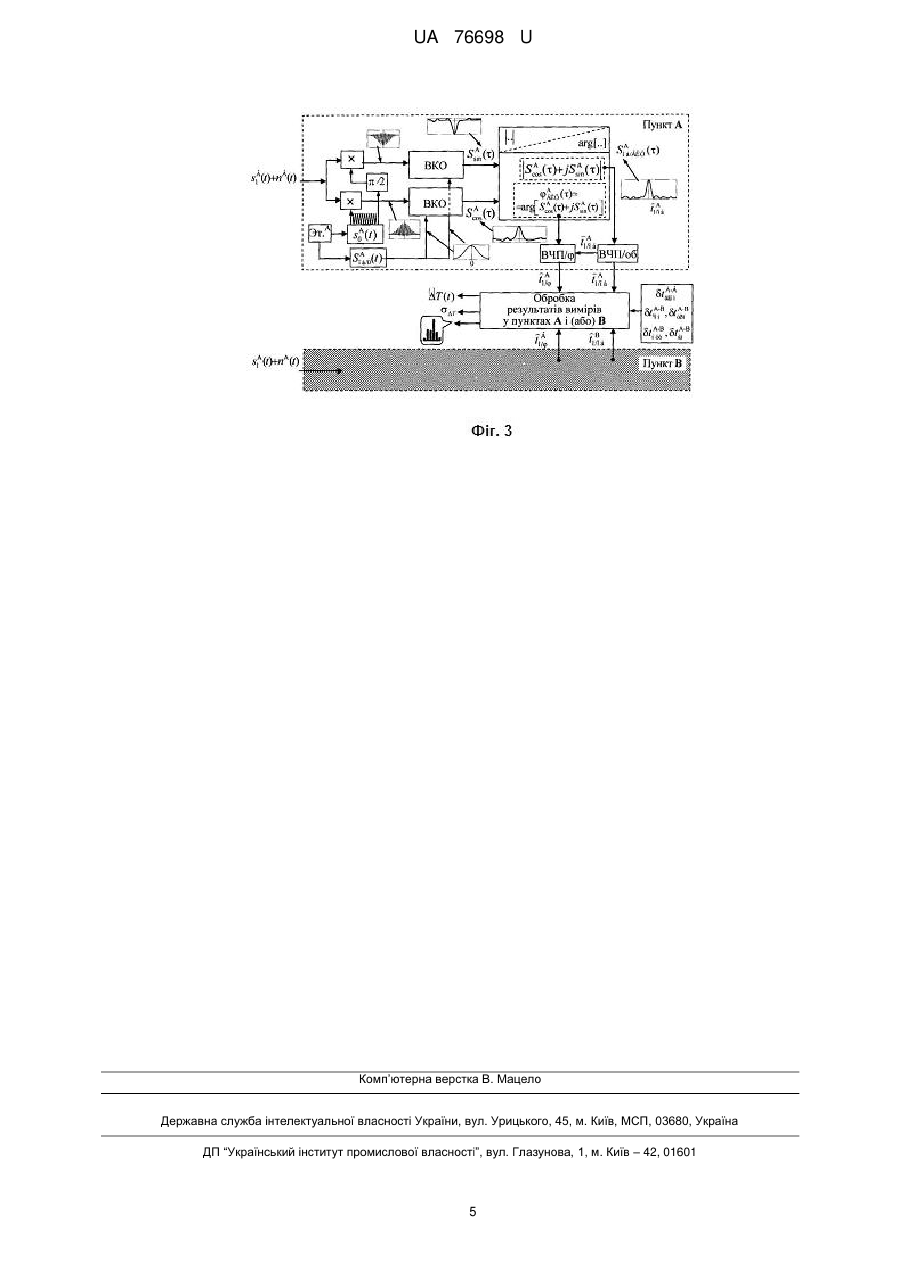
Реферат: Спосіб частотно-часової синхронізації просторово-рознесених еталонів часу й частоти, відповідно до якого проводять одночасні виміри величин зсуву в часі моментів прийому одного й того ж фрагменту сигналу геостаціонарного супутника відносно шкали часу еталонів у пунктах. Здійснюють прийом когерентного GPS-подібного сигналу геостаціонарного супутника системи SBAS направленими антенами, ширину діаграм спрямованості яких вибирають із умов, щоб при нутаціях геостаціонарний супутник не виходив за їх межі, далі у кожному із пунктів, де розміщені еталони, здійснюють квадратурну обробку прийнятої суміші сигналу і завад в поєднанні із взаємокореляційною обробкою в кожному каналі із прив'язаним до шкали еталону відеосигналом, код якого співпадає із кодом сигналу супутника, та визначають час затримки сигналу по її обвідній та фазі, що дозволяє, після обміну результатами вимірів, оцінити зсув шкал еталонів із урахуванням різниці затримок сигналу супутника до пунктів, що викликана геометричним розташуванням еталонів та супутника, його нутацією, різницею затримок сигналів в апаратурі пунктів, а також параметрами іоносфери та тропосфери на трасах поширення радіохвиль. UA 76698 U (54) СПОСІБ ЧАСТОТНО-ЧАСОВОЇ СИНХРОНІЗАЦІЇ ПРОСТОРОВО РОЗНЕСЕНИХ ЕТАЛОНІВ І СТАНДАРТІВ ЧАСУ Й ЧАСТОТИ UA 76698 U UA 76698 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі радіотехніки та метрології і призначена для звірення рознесених еталонів часу та частоти. Відомий спосіб звірення еталонів часу та частоти, заснований на стабільності часу поширення сигналів в метеорному радіоканалі, використовує випромінювання сигналу, прив'язаного до шкали часу вторинного еталону, до пункту первинного еталону та його подальшої ретрансляції у зворотному напрямку разом з сигналом, прив'язаним до шкали часу первинного еталону (Дудник Б.С. и др. Использование метеорного распространения радиоволн для привязки часов пунктов службы времени и частоты. - "Измерительная техника", 1971 № 12, с. 38-42). Для реалізації цього способу необхідно встановити радіопередавальне обладнання в пунктах. Воно потрібне для виявлення метеорного радіоканалу та передачі по ньому даних. Недоліками способу є наявність постійно діючої радіопередавальної апаратури в пунктах і недостатня оперативність, що обумовлено випадковістю появи метеорних сеансів зв'язку. Близьким по сукупності ознак є також спосіб звірення еталонів часу та частоти з використанням сигналів супутникових радіонавігаційних систем (СРНС) GPS та ГЛОНАСС. Ці системи включають по 24 штучних супутника Землі (ШСЗ), які обертаються навколо Землі з 3 періодом T12 год. на висоті h2010 км, і забезпечують навігаційною та часовою інформацією споживачів у глобальному масштабі. На борту ШСЗ систем GPS та ГЛОНАСС встановлено -13 цезієві стандарти частоти, відносна нестабільність яких за добу складає не більш 510 . Це дозволяє забезпечити похибку синхронізації шкал часу ШСЗ відносно шкали часу системи 15 нc при введені частотно-часових поправок два рази на добу. Для звірення у пунктах проводяться вимірювання зсуву шкал своїх еталонів відносно сигналів, прийнятих від одного із ШСЗ, та здійснюється обмін результатами вимірювань між пунктами (Ю.Г. Гужва, А.Г. Геворкян, П.П. Богданов, В.В. Овчинников. Синхронизация часов по сигналам "ГЛОНАСС". - "Радионавигация и время", 1994 № 1(4) с. 11-14). Цей спосіб також має свої недоліки: недостатня оперативність отримання даних, відносно мале співвідношення сигнал/завада, низька завадостійкість, залежність від стану СРНС GPS або ГЛОНАСС. Найближчим по сукупності ознак до заявленої корисної моделі є спосіб частотно-часової синхронізації просторово-рознесених еталонів часу й частоти з використанням сигналу від загального джерела - телекомунікаційного геостаціонарного супутника, відповідно до якого проводять одночасні виміри величин зсуву в часі моментів прийому одного й того ж фрагменту сигналу геостаціонарного супутника відносно шкали часу еталонів у пунктах (Пат. України № 38167, МПК G04G7/00. Опубл. 25.12.2008, Бюл. № 24). Цей спосіб має недоліки: складність обробки та визначення однакових фрагментів псевдовипадкових телекомунікаційних сигналів; при виборі параметрів антен не враховуються нутації геостаціонарного супутника; при обробці результатів не використовують змінювання затримок сигналів при нутації супутника та в апаратурі; не враховують параметри іоносфери та тропосфери на трасах поширення радіохвиль від супутника до пунктів. Технічною задачею корисної моделі є здійснення звірення еталонів часу і частоти з високими показниками точності, завадостійкості і оперативності. Такі технічні результати забезпечені за рахунок використання антен із відповідними діаграмами спрямованості (ДС), квадратурної обробки та визначення часового положення по обвідним та фазам когерентних GPS-подібних сигналів геостаціонарного супутника (ГС) системи SBAS, а також урахування при визначенні зсуву шкал нутації ГС, затримок в апаратурі, параметрів іоносфери та тропосфери на час затримки сигналів при поширенні радіохвиль. Поставлена задача вирішується тим, що в способі частотно-часової синхронізації просторово-рознесених еталонів часу й частоти, відповідно до якого проводять одночасні виміри величин зсуву в часі моментів прийому одного й того ж фрагменту сигналу геостаціонарного супутника відносно шкали часу еталонів у пунктах, згідно з корисною моделлю здійснюють прийом когерентного GPS-подібного сигналу геостаціонарного супутника системи SBAS направленими антенами, ширину діаграм спрямованості яких вибирають із умов, щоб при нутаціях геостаціонарний супутник не виходив за їх межі, далі у кожному із пунктів, де розміщені еталони, здійснюють квадратурну обробку прийнятої суміші сигналу і завад в поєднанні із взаємокореляційною обробкою в кожному каналі із прив'язаним до шкали еталону відеосигналом, код якого співпадає із кодом сигналу супутника, та визначають час затримки сигналу по її обвідній та фазі, що дозволяє, після обміну результатами вимірів, оцінити зсув шкал еталонів із урахуванням різниці затримок сигналу супутника до пунктів, що викликана геометричним розташуванням еталонів та супутника, його нутацією, різницею затримок сигналів в апаратурі пунктів, а також параметрами іоносфери та тропосфери на трасах поширення радіохвиль. 1 UA 76698 U На фіг. 1-3 зображено принципи реалізації заявленого способу. Фіг. 1 ілюструє розташування ГС системи SBAS та форми ДС антен. На фіг. 2 показано позначення сигналів та вимірюваних величин: H A ( t ) , HB ( t ) , T AB 5 10 шкали часу еталонів у відповідних пунктах та їх зсув; sГС ( t ) - когерентний сигнал ГС; t ГС А , з ГС В - час затримки сигналу супутника до пунктів А і В відповідно; A , nB ( t ) - завади у tз n (t) A B A B пунктах; s1 ( t ) , s1 ( t ) , t 1 , t 1 - прийняті у пунктах сигнали та час їх затримки. На фіг. 2,а приведено загальну структуру, а на фіг. 2,б - часову діаграму роботи системи, що реалізує заявлений спосіб. В системі використовується алгоритм загального охоплення або загального джерела (відомий у зарубіжній літературі як "common view"). В заявленому способі як загальне джерело використовується когерентний GPS-подібний сигнал ГС системи SBAS sГС ( t ) . Згідно з часовою діаграмою, що наведено на фіг. 2,б, зсув шкал можна визначити, A B обмінявшись результатами вимірів t 1 та t 1 , як T AB t A t B t ГС А t ГС В . (1) з з 1 15 1 Різниця часу поширення радіохвиль від ГС до пунктів складається із: t ГС А з t ГС В з у виразі (1) А В А А А А tГС А tГСВ t геом t ап В t нуВ t іон В t трпВ , (2) з з т 20 ГС А lГС В - різниця затримок сигналу від ГС до пунктів, що викликана А В де t геом l c геометричним розташуванням ГС відносно еталонів ( lГС А , lГС В - відстані ГС від пунктів, c швидкість світла); А А А - різниця затримок приймальної апаратури пунктів ( прм , В t ап В прм В прм прм затримки приймальної апаратури відповідного пункту); 25 А А А t нутВ , t іон В , t трпВ - різниця затримок сигналів, що викликані нутацією ГС, а також впливом параметрів іоносфери та тропосфери на відхилення швидкості поширення радіохвиль від швидкості світла. Виходячи із виразів (1) і (2), зсув шкал у заявленому способі пропонується визначати у вигляді А В А А А Т АВ t А t В t геом t ап В t нуВ t А В t трпВ . (3) т 1 30 35 1 іон На фіг. 3 зображено структурну схему системи, що реалізує заявлений спосіб, де наведено також основні часові діаграми, що ілюструють квадратурну обробку сигналу у пункті А. Оскільки обробка та вимірювання часового положення сигналу у пунктах аналогічні, структурна схема для пункту В для спрощення показана на фіг. 3 штрихованим прямокутником. На фіг. 3, крім прийнятих на фіг. 2 та у виразі (2), використано позначення: - блоки, що перетворюють сигнали: «х» - перемножувач; «/2» - фазообертач: "ВКО" взаємокореляційна обробка сигналів; - блок, що розраховує модуль та аргумент комплексних виразів, - «|..|/arg[..]»; A - блоки, що генерують сигнали: «Эт. » - еталон пункту A; « s 0 t » - генератор носійної А частоти 0 у пункті А; « S A t » - формувач обвідної сигналу ГС, прив'язаний до шкали об/0 еталону пункту А; 40 сигнали: A S sin , A S cos A A A Sоб / ВКФ S cos jS sin 45 "синусна" обвідна та "косинусна" складові взаємокореляційної після функції ВКО; (ВКФ); А A A 1 argScos jSsin - фаза ВКФ; - блоки, що вимірюють часове положення (ВЧП) сигналу відповідно по обвідній та фазі, «ВЧП/об» та «ВЧП/»; - оцінки часового положення сигналів у пунктах по обвідній та фазі відповідно - t А , t В , 1/ об 1/ об А В , t1 / . t1 / 2 UA 76698 U Особливостями квадратурної ВКО прийнятих сигналів та завад є те, що у кожному пункті коливання носійної частоти s A t , sB t та обвідні сигналу ГС S А t , SВ формуються 0 0 об / 0 об / 0 t безпосередньо від еталонів і прив'язані до їх шкал часу. Тому "синусна" та "косинусна" складові після ВКО складуть: A S sin 5 A S cos A A A A A A s1 t n t sin0 t S об / 0 t dt 0,5S об / АКФ t1 / об sin1 n sin/ ВКФ ; (4) A A A A A A s1 t n t cos0 t S об / 0 t dt 0,5S об / АКФ t1 / об cos1 ncos/ ВКФ ; (5) де Sоб / АКФ t A 1/ об A s1 t , сигналу A n sin/ ВКФ A 1 фазова A t1/ î á обвідна автокореляційної функції (АКФ) затримка сигналу A s1 t відносно SГС t , A A n t sin0 t S об / 0 t dt , A n cos/ ВКФ 10 - затримана на час A A n t cos0 t S об / 0 t dt - "синусна" та "косинусна" завадові складові в каналах після ВКО. З використанням (4) та (5) модуль обвідної ВКФ на виході блока «|..|/arg[..]» складе A A A A A Sоб / ВКФ Scos jS sin 0,5 Sоб / АКФ t1 / об np , A де np - результуюча завада, що спотворює АКФ сигналу. В блоці «ВЧП/об», на який подається S A , оцінюється затримка сигналу по обвідній об / ВКФ 15 A t 1 / об в пункті А. Ця оцінка використовується як для розрахунку зсуву шкал в блоці обробки результатів вимірів, так і для визначення фазової затримки сигналу в блоці «ВЧП/» A A А t 1 / ВКФ t 1 / об / 0 k A T0 , де T0 2 / 0 - період носійної частоти, k A - кількість періодів, яка визначається після 20 A усунення неоднозначності фазових вимірів за допомогою вимірів по обвідній, А t 1 / об ВКФ значення аргументу ВКФ A ВКФ 25 A argScos A jSsin для A t 1 / об . Остаточні розрахунки зсуву шкал (зокрема, ), з використанням вимірів по обвідній та фазі сигналу, та статистична обробка результатів (середньоквадратичне відхилення ∆Т гістограми та гіпотези про закон розподілу результатів вимірів) виконуються у відповідному A B A B блоці, на входи якого надходять масиви значень t 1 / об , t 1 / об , t 1 / , t 1 / , а також різниці 30 А В А А А А затримок t геом , t іон В , t трпВ , t нутВ , t ап В . Таким чином, запропонований спосіб дозволяє здійснювати звірення простороворознесених еталонів та стандартів часу та частоти з більшими точністю, надійністю, оперативністю та завадостійкістю. При цьому зберігаються пасивність та автономність системи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 Спосіб частотно-часової синхронізації просторово-рознесених еталонів часу й частоти, відповідно до якого проводять одночасні виміри величин зсуву в часі моментів прийому одного й того ж фрагменту сигналу геостаціонарного супутника відносно шкали часу еталонів у пунктах, 3 UA 76698 U 5 10 який відрізняється тим, що здійснюють прийом когерентного GPS-подібного сигналу геостаціонарного супутника системи SBAS направленими антенами, ширину діаграм спрямованості яких вибирають із умов, щоб при нутаціях геостаціонарний супутник не виходив за їх межі, далі у кожному із пунктів, де розміщені еталони, здійснюють квадратурну обробку прийнятої суміші сигналу і завад в поєднанні із взаємокореляційною обробкою в кожному каналі із прив'язаним до шкали еталону відеосигналом, код якого співпадає із кодом сигналу супутника, та визначають час затримки сигналу по її обвідній та фазі, що дозволяє, після обміну результатами вимірів, оцінити зсув шкал еталонів із урахуванням різниці затримок сигналу супутника до пунктів, що викликана геометричним розташуванням еталонів та супутника, його нутацією, різницею затримок сигналів в апаратурі пунктів, а також параметрами іоносфери та тропосфери на трасах поширення радіохвиль. 4 UA 76698 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for frequency and time synchronization of spatially separated time and frequency standards
Автори англійськоюKoval Yurii Oleksandrovych, Pryimak Viacheslav Yuriiovych, Kostyria Oleksandr Oleksiiovych, Khusein Akram Fatkhi
Назва патенту російськоюСпособ частотно-временной синхронизации пространственно разнесенных эталонов и стандартов времени и частоты
Автори російськоюКоваль Юрий Александрович, Приймак Вячеслав Юрьевич, Костиря Александр Алексеевич, Хусейн Акрам Фатхи
МПК / Мітки
МПК: G04G 7/00
Мітки: еталонів, просторової, спосіб, частоти, частотно-часової, стандартів, рознесених, часу, синхронізації
Код посилання
<a href="https://ua.patents.su/7-76698-sposib-chastotno-chasovo-sinkhronizaci-prostorovo-roznesenikh-etaloniv-i-standartiv-chasu-jj-chastoti.html" target="_blank" rel="follow" title="База патентів України">Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу й частоти</a>
Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу і частоти
Номер патенту: 38167
Опубліковано: 25.12.2008
Автори: Коваль Юрій Олександрович, Іванова Олена Олександрівна, Нестеренко Георгій Вікторович
МПК: G04G 7/00
Мітки: стандартів, рознесених, просторової, еталонів, часу, частотно-часової, синхронізації, частоти, спосіб
Формула / Реферат:
Спосіб частотно-часової синхронізації просторово рознесених еталонів і стандартів часу і частоти, відповідно до якого проводять одночасні в межах просторово-часового зсуву виміри величин зсуву в часі моментів прийому одного й того ж фрагменту сигналу відносно реперних міток часу шкал у пунктах, який відрізняється тим, що надалі обчислюють значення основних параметрів взаємного ходу в пунктах, зокрема швидкість цього ходу, і змінюють значення...
Спосіб звіряння просторово-рознесених еталонів часу і частоти
Номер патенту: 54198
Опубліковано: 17.02.2003
Автори: Нестеренко Георгій Вікторович, Коваль Юрій Олександрович, Бавикіна Вероніка Всеволодівна, Антіпов Іван Євгенович
МПК: G04G 7/00
Мітки: часу, просторово-рознесених, спосіб, звіряння, частоти, еталонів
Формула / Реферат:
Спосіб звіряння просторово-рознесених еталонів часу і частоти, який полягає у використанні еталонних сигналів часу і частоти, що передаються у складі сигналу телевізійного мовлення і приймаються по метеорному каналу, який відрізняється тим, що довжину метеорної траси обчислюють з використанням даних про висоту метеорного сліду, одержуваних пасивним різницево-далекомірним методом у пункті прийому.
Спосіб звіряння просторо-рознесених еталонів часу та частоти
Номер патенту: 37929
Опубліковано: 15.05.2001
Автори: Нестеренко Георгій Вікторович, Коваль Юрій Олександрович, Трощін Олег Леонідович, Антіпов Іван Євгенович
МПК: G04G 7/00
Мітки: просторо-рознесених, звіряння, частоти, еталонів, часу, спосіб
Текст:
...з елементом пам'яті 7, вихід обчислювального пристрою 6 з'єднаний з підсумувачем 8, вихід якого є виходом пристрою в цілому. Спосіб може бути реалізований наступним чином. Для визначення довжини траси L, крім відстані d, необхідно знати місце розташування метеорного сліду М, через який здійснюється прийом. Для цього в пункті приймання встановлюєть ся фазовий кутомір, який являє собою п'ять просторо-рознесених антен. Вимірювання куту між...
Спосіб звірення рознесених шкал еталонів часу
Номер патенту: 42429
Опубліковано: 15.10.2001
Автори: Коваль Юрій Олександрович, Бавикіна Вероніка Всеволодовна
МПК: G04C 11/00
Мітки: часу, рознесених, шкал, спосіб, звірення, еталонів
Формула / Реферат:
Спосіб звірення рознесених шкал еталонів часу, відповідно до якого формують опорні шкали часу, зсунені у веденому пункті на t0, а в головному пункті - на 2t0, випромінюють сигнал головного пункту, приймають цей сигнал у веденому пункті і ретранслюють його відносно опорної шкали з затримкою, яка дорівнює часу випередження прийнятим сигналом опорної шкали, приймають у головному пункті ретрансльований із затримкою сигнал із веденого пункту і...
Пристрій для синхронізації/звіряння шкал частоти/часу рознесених у просторі зберігачів
Номер патенту: 34493
Опубліковано: 11.08.2008
Автори: Бондар Євгенія Юріївна, Нестеренко Георгій Вікторович
МПК: G04G 11/00
Мітки: шкал, пристрій, зберігачів, рознесених, просторі
Формула / Реферат:
Пристрій для синхронізації/звіряння шкал частоти/часу рознесених у просторі зберігачів, що містить оборотний і стабільний по затримці канал, а також у ведучому і веденому пунктах - зберігач частоти/часу, вимірювач інтервалів часу каналу синхронізації, синхрогенератор, пристрій обробки інформації, модулятор, широкосмуговий підсилювач каналу синхронізації, генератор короткого імпульсу, антенний комутатор, першу антену каналу синхронізації,...
Попередній патент: Транспортний засіб для перевезення тари з валютними цінностями та осіб, що їх супроводжують
Наступний патент: Спосіб тактики комбінованого лікування хворих на мультифокальний атеросклероз
Випадковий патент: Вибухова речовина