Система перетворення кутового переміщення антени рлс
Номер патенту: 78880
Опубліковано: 10.04.2013
Автори: Кутова Олена Вікторівна, Постніков Володимир Миколайович
Формула / Реферат
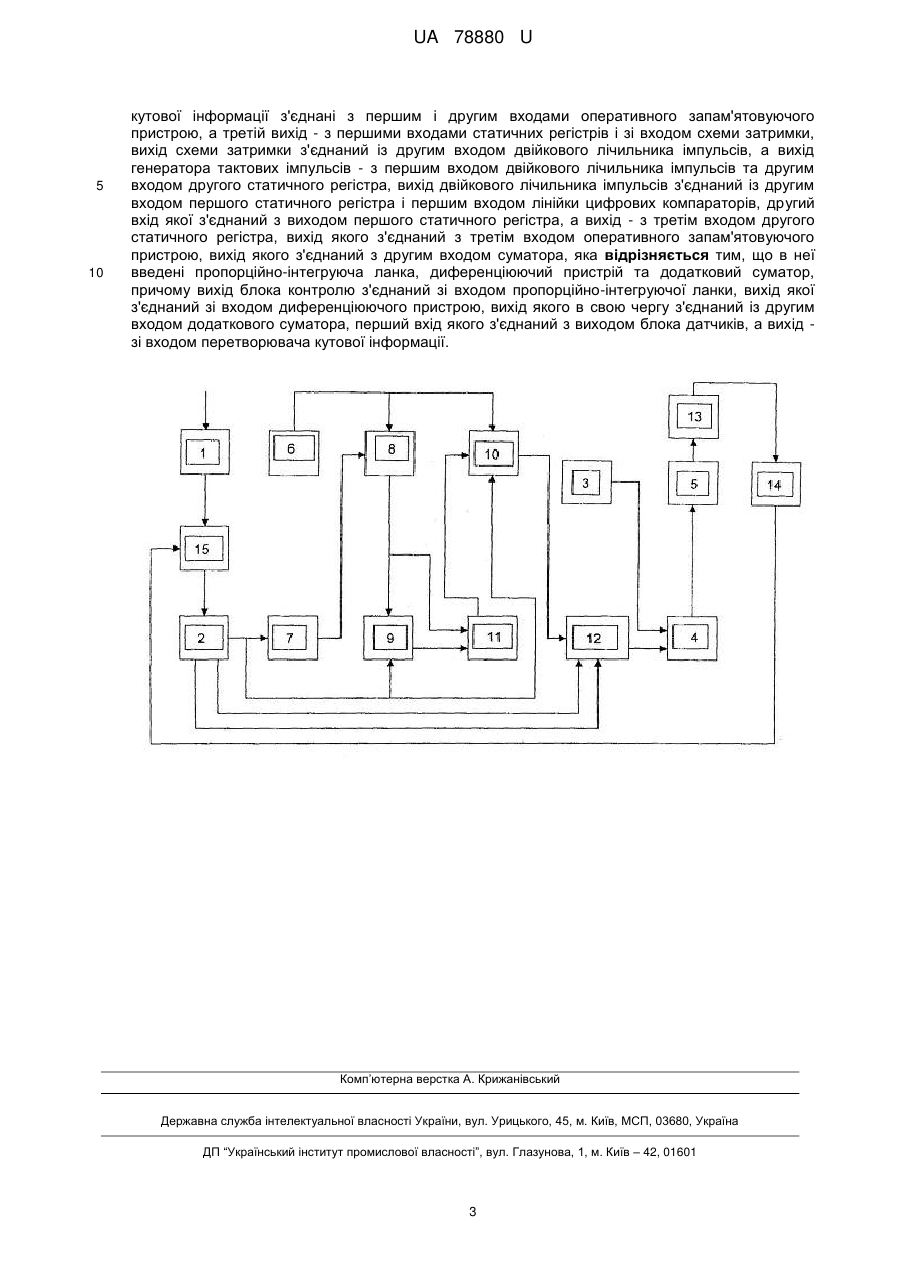
Система перетворення кутового переміщення антени радіолокаційної станції (РЛС), що містить блок датчиків, перетворювач кутової інформації, датчик коду з'єднаний з першим входом суматора, вихід якого з'єднаний з блоком контролю, перший і другий виходи перетворювача кутової інформації з'єднані з першим і другим входами оперативного запам'ятовуючого пристрою, а третій вихід - з першими входами статичних регістрів і зі входом схеми затримки, вихід схеми затримки з'єднаний із другим входом двійкового лічильника імпульсів, а вихід генератора тактових імпульсів - з першим входом двійкового лічильника імпульсів та другим входом другого статичного регістра, вихід двійкового лічильника імпульсів з'єднаний із другим входом першого статичного регістра і першим входом лінійки цифрових компараторів, другий вхід якої з'єднаний з виходом першого статичного регістра, а вихід - з третім входом другого статичного регістра, вихід якого з'єднаний з третім входом оперативного запам'ятовуючого пристрою, вихід якого з'єднаний з другим входом суматора, яка відрізняється тим, що в неї введені пропорційно-інтегруюча ланка, диференціюючий пристрій та додатковий суматор, причому вихід блока контролю з'єднаний зі входом пропорційно-інтегруючої ланки, вихід якої з'єднаний зі входом диференціюючого пристрою, вихід якого в свою чергу з'єднаний із другим входом додаткового суматора, перший вхід якого з'єднаний з виходом блока датчиків, а вихід - зі входом перетворювача кутової інформації.
Текст
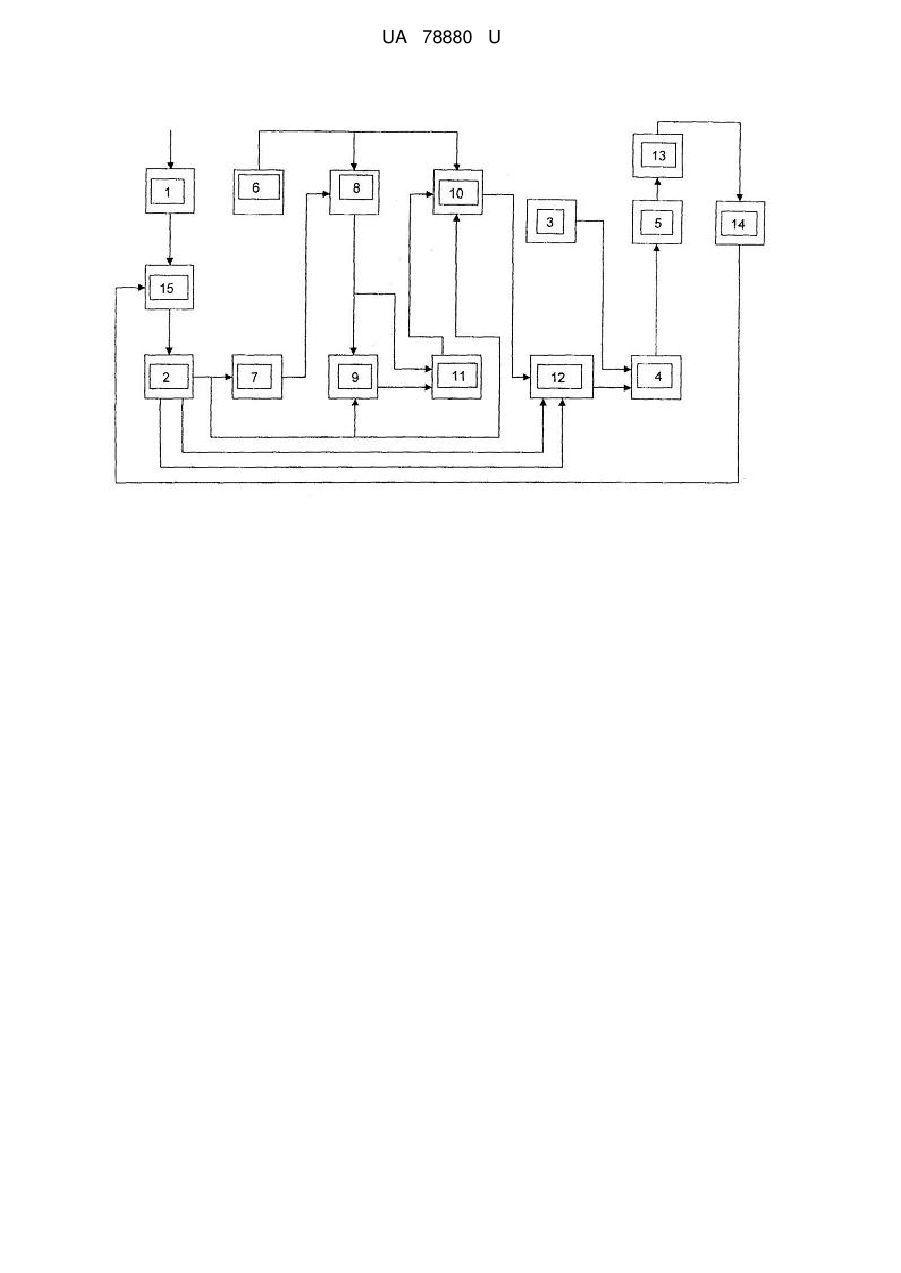
Реферат: UA 78880 U UA 78880 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області радіолокаційної техніки, може бути використана в радіолокаційних станціях (РЛС). Відома система перетворення кутового переміщення антени РЛС [Пат. Росії № 2248092с1, опубл. 10.03.2005, Бюл. № 7, 2005 p.]. Ця система перетворення кутового переміщення антени РЛС, взята за прототип, містить блок датчиків, кінематично пов'язаний з валом антени, перетворювач кутової інформації, суматор, датчик коду, блок контролю, генератор тактових імпульсів, схему затримки, двійковий лічильник імпульсів, перший і другий статичні регістри, лінійку цифрових компараторів, оперативний запам'ятовуючий пристрій, причому вихід блока датчиків з'єднаний зі входом перетворювача кутової інформації, датчик коду з'єднаний з першим входом суматора, вихід якого з'єднаний з блоком контролю, перший і другий виходи перетворювача кутової інформації з'єднані з першим і другим входами оперативного запам'ятовуючого пристрою, а третій вихід - з першими входами статичних регістрів і зі входом схеми затримки, вихід схеми затримки з'єднаний із другим входом двійкового лічильника імпульсів, а вихід генератора тактових імпульсів - з першим входом двійкового лічильника імпульсів та другим входом другого статичного регістра, вихід двійкового лічильника імпульсів з'єднаний із другим входом першого статичного регістра і першим входом лінійки цифрових компараторів, другий вхід якої з'єднаний з виходом першого статичного регістра, а вихід - з третім входом другого статичного регістра, вихід якого з'єднаний з третім входом оперативного запам'ятовуючого пристрою, вихід якого з'єднаний з другим входом суматора. Недоліком системи є те, що вона не дозволяє достатньо швидко і просто проводити операцію орієнтування РЛС, а також наявність в формованому нею коді кута не облікової функціональної складової кутової помилки, яка в межах кожного обороту вала антени змінюється відповідно до закону зміни помилки кінематичного ланцюга, зв'язує блок датчиків з валом антени. Помилка кінематичного ланцюга може бути значною і досягати 30-40 % від загальної помилки перетворення кута, що реально приводить до зниження точності перетворення кутового переміщення антени РЛС. Задачею корисної моделі є підвищення точності перетворення кутового переміщення антени РЛС за рахунок виключення функціональної складової помилки перетворення, викликаної похибками кінематичного ланцюга. Поставлена задача вирішується тим, що в систему перетворення кутового переміщення антени РЛС, яка містить блок датчиків, кінематично пов'язаний з валом антени, причому вихід блоку датчиків з'єднаний зі входом перетворювача кутової інформації, датчик коду з'єднаний з першим входом суматора, вихід якого з'єднаний з блоком контролю, перший і другий виходи перетворювача кутової інформації з'єднані з першим і другим входами оперативного запам'ятовуючого пристрою, а третій вихід - з першими входами статичних регістрів і зі входом схеми затримки, вихід схеми затримки з'єднаний із другим входом двійкового лічильника імпульсів, а вихід генератора тактових імпульсів - з першим входом двійкового лічильника імпульсів та другим входом другого статичного регістра, вихід двійкового лічильника імпульсів з'єднаний із другим входом першого статичного регістра і першим входом лінійки цифрових компараторів, другий вхід якої з'єднаний з виходом першого статичного регістра, а вихід - з третім входом другого статичного регістра, вихід якого з'єднаний з третім входом оперативного запам'ятовуючого пристрою, вихід якого з'єднаний з другим входом суматора, згідно з корисною моделлю, введені пропорційно-інтегруюча ланка, диференціюючий пристрій та додатковий суматор, причому вихід блока контролю з'єднаний зі входом пропорційно-інтегруючої ланки, вихід якої з'єднаний зі входом диференціюючого пристрою, вихід якого в свою чергу з'єднаний із другим входом додаткового суматора, перший вхід якого з'єднаний з виходом блока датчиків, а вихід додаткового суматора з'єднаний із входом перетворювача кутової інформації. На кресл. наведена структурна схема системи перетворення кутового переміщення антени РЛС. Корисна модель містить блок датчиків 1, вихід якого з'єднаний із першим входом додаткового суматора 15, вихід якого з'єднаний зі входом перетворювача кутової інформації 2, датчик коду 3 з'єднаний з першим входом суматора 4, вихід якого з'єднаний зі входом блоку контролю 5, перший і другий виходи перетворювача кутової інформації 2 з'єднані з першим і другим входами оперативного запам'ятовуючого пристрою 12, а третій вихід - з першими входами статичних регістрів 9, 10 і зі входом схеми затримки 7, вихід схеми затримки з'єднаний із другим входом двійкового лічильника імпульсів 8, а вихід генератора тактових імпульсів 6 - з першим входом двійкового лічильника імпульсів 8 та другим входом другого статичного регістра 10, вихід двійкового лічильника імпульсів 8 з'єднаний із другим входом першого статичного регістра 9 і першим входом лінійки цифрових компараторів 11, другий вхід якої з'єднаний з виходом першого статичного регістра 9, а вихід - з третім входом другого статичного регістра 10, вихід якого з'єднаний з третім входом оперативного запам'ятовуючого пристрою 12, вихід 1 UA 78880 U 5 10 15 20 25 30 35 40 45 50 якого з'єднаний з другим входом суматора 4, вихід блока контролю 5 з'єднаний зі входом пропорційно-інтегруючої ланки 13, вихід якої з'єднаний зі входом диференціюючого пристрою 14, вихід якого в свою чергу з'єднаний із другим входом додаткового суматора 15. Система працює таким чином: блок датчиків 1, кінематично зв'язаний з валом антени, формує інформацію про кут повороту антени, яка надходить на вхід перетворювача кутової інформації 2 та перетворює в цифровий n-розрядний код кута на першому виході в дві послідовності імпульсів: кутові імпульси (КІ) на другому виході - в кількісні 2n імпульси за кожний оберт антени, де n - задане число розрядів коду кута, та опорні імпульси (01) на третьому виході - по одному імпульсу за оберт антени. Імпульси з генератора тактових імпульсів (ТІ) 6 надходять на двійковий лічильник імпульсів 8 та регістр 10. Частота імпульсів ТІ повинна бути в декілька раз більша від частоти імпульсів КІ. Лічильник імпульсів 8 обнуляється один раз за оберт антени опорним імпульсом 01, котрий надходить на його перший вхід через схему затримки 7. При постійній швидкості обертання антени по закінченні кожного її оберту в лічильнику установлюється цифровий код, який відповідає кількості тактових імпульсів (ТІ), що надходять на другий вхід лічильника. При переключенні швидкості обертання антени відповідно змінюється і значення цифрового коду в рамках кожного циклу рахунку. Статичний регістр 9 зберігає за час одного оберту антени цифровий код, котрий надходить на його другий вхід з двійкового лічильника 8. Запис коду в регістр 9 проводиться по сигналу 01, який подається на цей регістр по першому входу. Кількість компараторів в лінійці дорівнює заданому числу розрядів вихідного коду кута. Компаратори призначені для порозрядного порівнювання значень теперішнього коду кута, який надходить на перший вхід з лічильника тактових імпульсів 8 з цифровим порогом кожного компаратора лінійки. Цифрові пороги для компараторів задаються наступним чином. По закінченні кожного оберту антени в регістрі 9 записуються і зберігається цифровий код, який рівний за значенням числу тактових імпульсів в одному періоді оберту антени. Шляхом ділення цього коду на 2 формується цифровий поріг компаратора старшого (n-1) розряду перетвореного коду. Діленням вихідного коду на 4, 8, 16 і т. д. задаються цифрові пороги всіх других компараторів, навіть компаратора молодшого розряду. Операція ділення вихідного коду здійснюється зменшенням ваги розрядів при порозрядному монтажному здвигу виходів коду в сторону молодших розрядів. В момент порівняння поточний коду від двійкового лічильника імпульсів 8 з цифровим порогом будь-якого компаратора цей компаратор спрацьовує і видає імпульс скидання в нуль всієї молодшої лінійки та імпульс установки в одиницю на третій вхід відповідного розряду регістра 10. Запис коду в регістр 10 проводиться по сигналу ТІ, який подається на другий вхід регістра 10. Загальне скидання в нуль регістра здійснюється сигналом 01, який надходить на перший вхід цього регістра. Отже, в регістрі 10 сформований цифровий код кута заданої розрядності. Цей код подається на інформаційний третій вхід оперативного запам'ятовуючого пристрою 12, на адресний перший вхід якого надходить код кута з перетворювача кутової інформації 2. Запис інформації в оперативний запам'ятовуючий пристрій 12 здійснюється по другому входу сигналами КІ з перетворювача кутової інформації 2. З виходу оперативного запам'ятовуючого пристрою 12 лінійно змінюючий код надходить на другий вхід суматора 4, де складується з кодом орієнтування, який надходить на його перший вхід з датчика коду 3. З виходу суматора 4 орієнтований код кута, який являє собою код азимута антени РЛС, видається на блок контролю 5. Отриманий код азимута антени РЛС з виходу блока контролю 5 подається на вхід пропорційно-інтегруючої ланки 13, яка в свою чергу забезпечує постійну швидкість обертання антени. Далі цей сигнал надходить на вхід диференціюючого пристрою 14, який формує поточне значення швидкості зміни кута повороту антени РЛС. Отримане значення швидкості зміни кута повороту подається з виходу диференціюючого пристрою 14 на вхід додаткового суматора 15 для порівняння коду азимута антени на виході з вхідним значенням та отримання значення похибки кінематичного ланцюга. Таким чином вирішується поставлена задача підвищення точності перетворення кутового переміщення антени РЛС за рахунок виключення функціональної складової помилки перетворення, викликаної похибками кінематичного ланцюга. 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 Система перетворення кутового переміщення антени радіолокаційної станції (РЛС), що містить блок датчиків, перетворювач кутової інформації, датчик коду з'єднаний з першим входом суматора, вихід якого з'єднаний з блоком контролю, перший і другий виходи перетворювача 2 UA 78880 U 5 10 кутової інформації з'єднані з першим і другим входами оперативного запам'ятовуючого пристрою, а третій вихід - з першими входами статичних регістрів і зі входом схеми затримки, вихід схеми затримки з'єднаний із другим входом двійкового лічильника імпульсів, а вихід генератора тактових імпульсів - з першим входом двійкового лічильника імпульсів та другим входом другого статичного регістра, вихід двійкового лічильника імпульсів з'єднаний із другим входом першого статичного регістра і першим входом лінійки цифрових компараторів, другий вхід якої з'єднаний з виходом першого статичного регістра, а вихід - з третім входом другого статичного регістра, вихід якого з'єднаний з третім входом оперативного запам'ятовуючого пристрою, вихід якого з'єднаний з другим входом суматора, яка відрізняється тим, що в неї введені пропорційно-інтегруюча ланка, диференціюючий пристрій та додатковий суматор, причому вихід блока контролю з'єднаний зі входом пропорційно-інтегруючої ланки, вихід якої з'єднаний зі входом диференціюючого пристрою, вихід якого в свою чергу з'єднаний із другим входом додаткового суматора, перший вхід якого з'єднаний з виходом блока датчиків, а вихід зі входом перетворювача кутової інформації. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for transformation of angular displacement of radar antenna
Автори англійськоюPostnikov Volodymyr Mykolaiovych, Kutova Olena Viktorivna
Назва патенту російськоюСистема преобразования углового перемещения антенны рлс
Автори російськоюПостников Владимир Николаевич, Кутова Елена Викторовна
МПК / Мітки
Мітки: переміщення, кутового, антени, система, перетворення, рлс
Код посилання
<a href="https://ua.patents.su/5-78880-sistema-peretvorennya-kutovogo-peremishhennya-anteni-rls.html" target="_blank" rel="follow" title="База патентів України">Система перетворення кутового переміщення антени рлс</a>
Перетворювач кутового переміщення в цифровий код
Номер патенту: 33546
Опубліковано: 15.05.2002
Автори: Азін Євген Леонідович, Нор Олег Віталійович, Іпполітов Леонід Іванович, Єрмоленко Анатолій Олександрович, Кукуй Костянтин Абрамович, Світличний Олексій Васильович
МПК: H03M 1/22, G08C 19/38
Мітки: кутового, код, цифровий, перетворювач, переміщення
Формула / Реферат:
1. Перетворювач кутового переміщення в цифровий код, що містить генератор імпульсів, схему початкового скидання, компаратор, формувачі напруги живлення синусної і косинусної обмоток синусно-косинусного обертового трансформатора (СКОТ) або статорних обмоток сельсина, лічильник, лічильний вхід якого з'єднаний з першим виходом генератора імпульсів, вхід скидання - з виходом схеми початкового скидання, вихід - з входами формувачів напруги...
Пристрій для перетворення планів багатофакторного експерименту
Номер патенту: 67062
Опубліковано: 25.01.2012
Автори: Цеховський Максим Володимирович, Кошовий Микола Дмитрович, Дергачов Володимир Андрійович, Костенко Олена Михайлівна
МПК: G06F 17/00
Мітки: багатофакторного, планів, пристрій, експерименту, перетворення
Формула / Реферат:
Пристрій для перетворення планів багатофакторного експерименту, що містить генератор імпульсів, керуючий вхід, елемент І, елемент НІ, двійковий лічильник, блок порівняння, входи задання кількості дослідів, перший блок пам'яті, елемент затримки, інформаційний вихід, причому вихід генератора імпульсів з'єднаний з першим входом елемента І, керуючий вхід з'єднаний з другим входом елемента І, вихід елемента НІ з'єднаний з третім входом елемента...
Відмовостійка система з аналізом ресурсу
Номер патенту: 15201
Опубліковано: 15.06.2006
Автори: Кулік Тамара Васильовна, Кулік Анатолій Степанович, Дергачов Володимир Андрійович
МПК: G06F 11/18
Мітки: відмовостійка, система, ресурсу, аналізом
Формула / Реферат:
Відмовостійка система з аналізом ресурсу, яка має блоки, що резервуються, елементи нерівнозначності, елементи І, пороговий елемент, вихід системи, перший двійковий лічильник, перший і другий елементи АБО, n детекторів фронту, n детекторів спаду, виходи індикації технічного стану, причому вихід і-го блока, що резервується, з'єднаний з першим входом і-го елемента I, вихід і-го елемента нерівнозначності з'єднаний з другим входом і-го елемента І,...
Автоматизована система для проведення багатофакторного експерименту
Номер патенту: 49801
Опубліковано: 11.05.2010
Автори: Цеховський Максим Володимирович, Кошовий Микола Дмитрович, Костенко Олена Михайлівна, Дергачов Володимир Андрійович, Оганесян Артем Семенович
МПК: G06F 17/00
Мітки: автоматизована, багатофакторного, система, проведення, експерименту
Формула / Реферат:
Автоматизована система для проведення багатофакторного експерименту, що містить елемент І, елемент НІ, двійковий лічильник, керуючий вхід, інформаційний вихід, блок пам'яті, генератор імпульсів, елемент затримки, детектор фронту, виходи значень рівнів факторів, суматор, входи номера варіанта, причому вихід елемента НІ з'єднаний з першим входом елемента І, вихід якого з'єднаний з підсумовуючим входом двійкового лічильника, керуючий вхід...
Обчислювальний перетворювач “робочий код – цифровий еквівалент”
Номер патенту: 61610
Опубліковано: 25.07.2011
Автори: Дудник Олександр Вікторович, Кадук Олександр Володимирович, Азаров Олексій Дмитрович, Росощук Анастасія Володимирівна
Мітки: код, цифровий, перетворювач, обчислювальній, еквівалент, робочий
Формула / Реферат:
Обчислювальний перетворювач "робочий код - цифровий еквівалент", який містить n-розрядний регістр, двійковий суматор, причому вхід n-розрядного регістра є входом перетворювача, а вихід двійкового суматора є виходом перетворювача, який відрізняється тим, що введено блок керування, блок оперативної пам'яті, цифровий комутатор, причому вхід цифрового комутатора з'єднано з виходами оперативної пам'яті та блока керування, вихід...
Попередній патент: Двоантенний кореляційний радіометр
Наступний патент: Аспіраційне укриття перевантажувального вузла сипучих матеріалів
Випадковий патент: Спосіб одержання модифікованого со-вмісного перовськітного каталізатора для процесу селективного перетворення метану в вищі вуглеводні