Система керування місцезнаходженням рухомого об’єкта
Номер патенту: 78921
Опубліковано: 10.04.2013
Автори: Лістунов Андрій Вікторович, Дергачов Костянтин Юрійович, Кулік Анатолій Степанович
Формула / Реферат
Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації, пристроєм індикації та зв'язку з персональним комп'ютером та передавачем, джерело живлення, вихід якого через підсистему стабілізації живлення з'єднаний з пристроєм індикації та зв'язку з персональним комп'ютером, вбудовані акумулятори, входи і виходи якихз'єднані з підсистемою стабілізації живлення, а також центральну станцію, входи і виходи якої з'єднані з пристроєм індикації та зв'язку з персональним комп'ютером, рухомий об'єкт, до якого входять передавач, вихід якого з'єднаний з першим входом глобальної супутникової системи, приймач, вхід якого з'єднаний з другим виходом глобальної супутникової системи, контролер, вхід якого з'єднаний з приймачем, а вихід з'єднаний з пристроєм індикації, та акумулятори, виходи яких з'єднані з другим входом контролера, пристроєм індикації, передавачем та приймачем, яка відрізняється тим, що в рухомий об'єкт введений процесор та пристрій вводу даних користувача, вихід якого з'єднаний з першим входом процесора, перший вихід процесора з'єднаний з другим входом пристрою індикації, другий вихід процесора з'єднаний з другим входом передавача, другий вхід процесора з'єднаний з четвертим виходом акумуляторів.
Текст
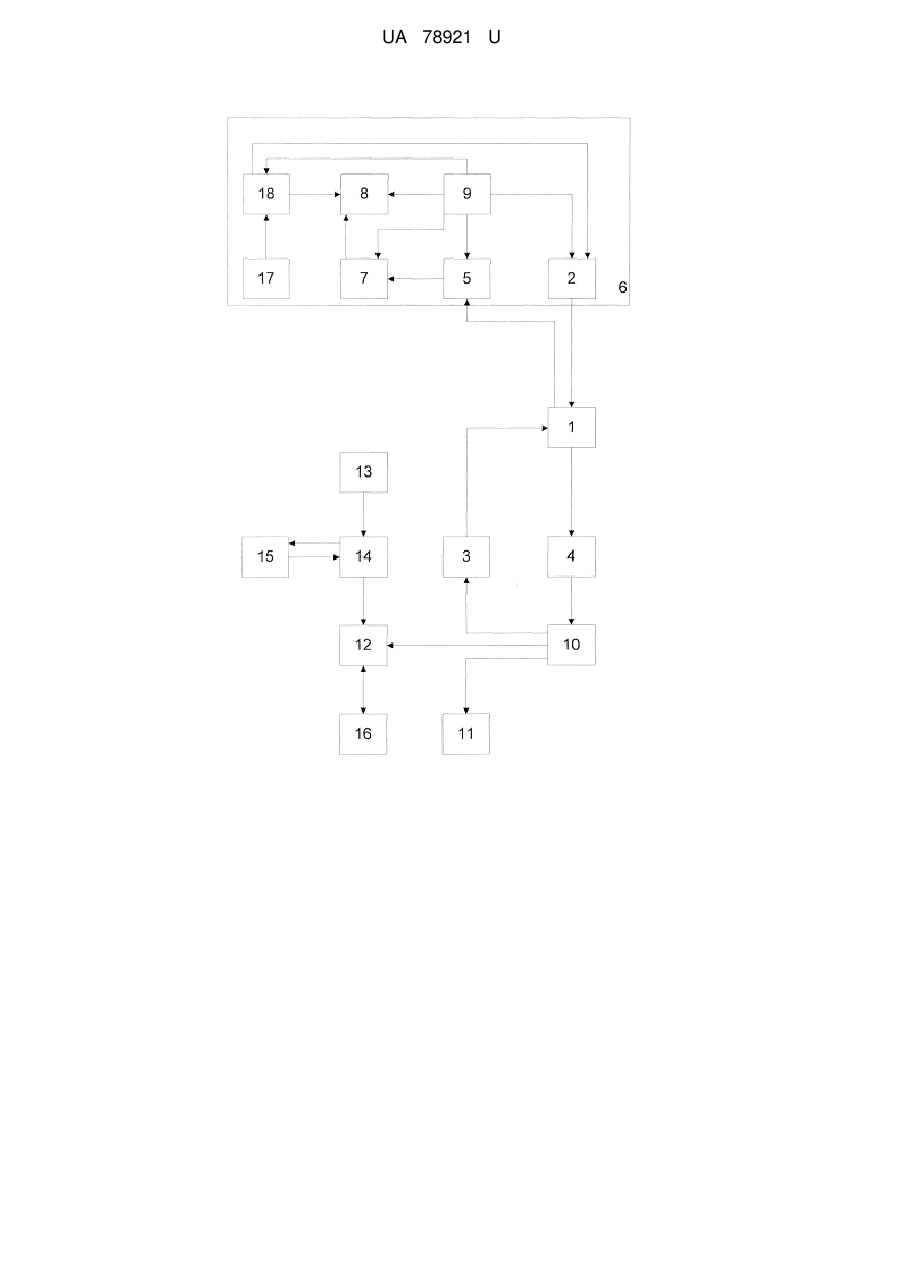
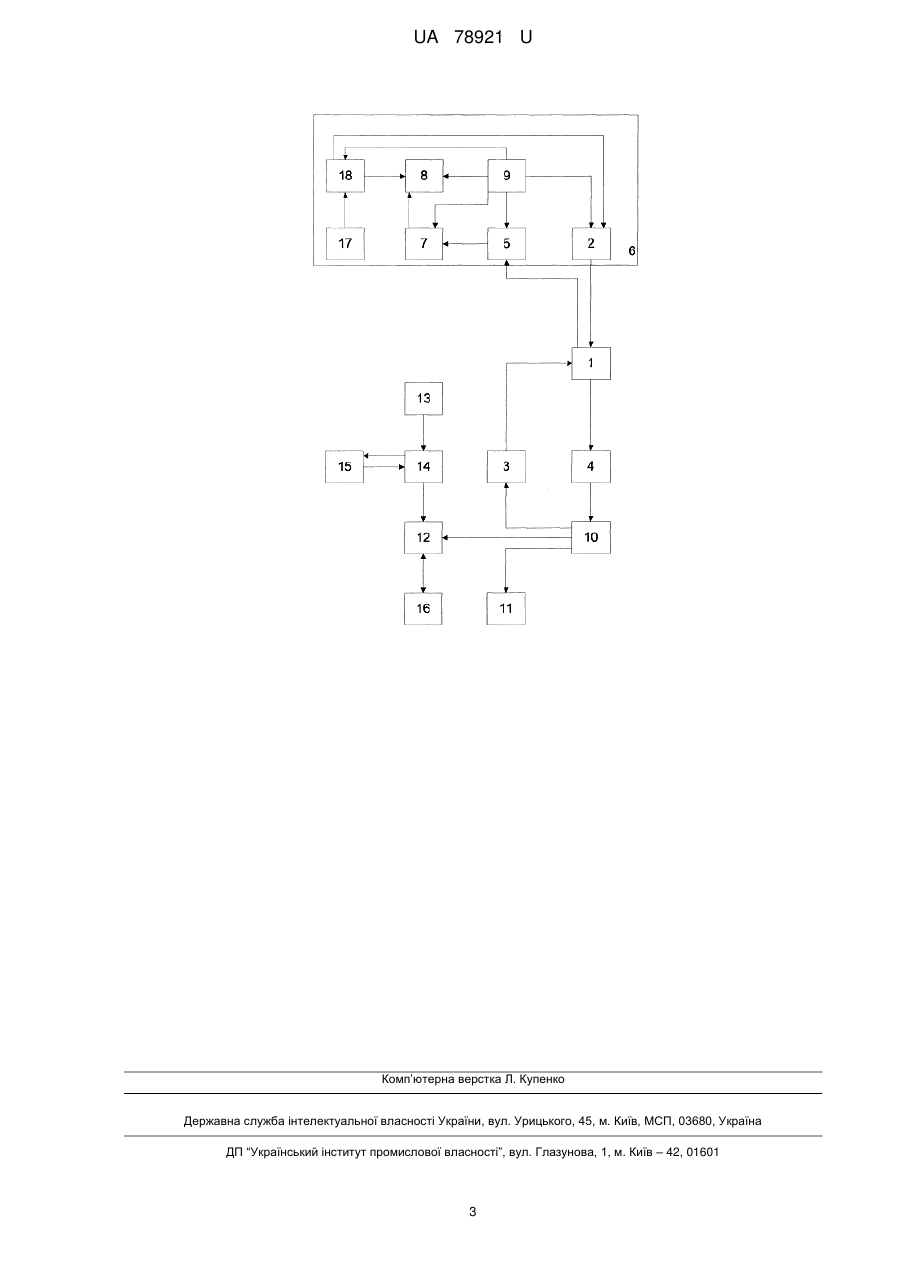
Реферат: UA 78921 U UA 78921 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області навігації і може використовуватись для здійснення оперативного контролю за переміщенням рухомих об'єктів. Також система може вирішувати задачі по оптимізації роботи парку транспортних засобів на підприємствах. Найбільш близькою є система відображення місцезнаходження рухомого об'єкта [Патент України №55409, М.кл. G08G 1/0968, Система відображення місцезнаходження рухомого об'єкта, опубл. 10.12.2010, Бюл. №23, 2010р.], що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації та пристроєм індикації та зв'язку з персональним комп'ютером, джерело живлення, вихід якого через підсистему стабілізації живлення з'єднаний з пристроєм індикації та зв'язку з персональним комп'ютером, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, а також центральну станцію, входи і виходи якої з'єднані з пристроєм індикації та зв'язку з персональним комп'ютером, додатковий передавач, вхід якого з'єднаний з керуючим контролером, а вихід з'єднаний з другим входом глобальної супутникової системи, додатковий приймач, розміщений на рухомому об'єкті, вхід якого з'єднаний з другим виходом глобальної супутникової системи, контролер, вхід якого з'єднаний з додатковим приймачем, а вихід з'єднаний з пристроєм індикації, та акумулятори, виходи яких з'єднані з другим входом контролера, пристроєм індикації, передавачем та додатковим приймачем. Недоліком цієї системи є неможливість керування рухомим об'єктом для користувача. В основу корисної моделі поставлено задачу керування місцезнаходженням рухомого об'єкта користувачем. Поставлена задача вирішується тим, що в систему, яка містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації, пристроєм індикації та зв'язку з персональним комп'ютером та передавачем, джерело живлення, вихід якого через підсистему стабілізації живлення з'єднаний з пристроєм індикації та зв'язку з персональним комп'ютером, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, а також центральну станцію, входи і виходи якої з'єднані з пристроєм індикації та зв'язку з персональним комп'ютером, рухомий об'єкт, до якого входять передавач, вихід якого з'єднаний з першим входом глобальної супутникової системи, приймач, вхід якого з'єднаний з другим виходом глобальної супутникової системи, контролер, вхід якого з'єднаний з приймачем, а вихід з'єднаний з пристроєм індикації, та акумулятори, виходи яких з'єднані з другим входом контролера, пристроєм індикації, передавачем та приймачем, в рухомий об'єкт введений процесор та пристрій вводу даних користувача, вихід якого з'єднаний з першим входом процесора, перший вихід процесора з'єднаний з другим входом пристрою індикації, другий вихід процесора з'єднаний з другим входом передавача, другий вхід процесора з'єднаний з четвертим виходом акумуляторів. На кресленні показана блок-схема системи керування місцезнаходженням рухомого об'єкта. Система керування місцезнаходженням рухомого об'єкта містить глобальну супутникову систему 1, перший і другий входи якої з'єднані з виходами передавача 2 і додаткового передавача 3 відповідно, а перший і другий виходи з'єднані відповідно з приймачем 4 і додатковим приймачем 5, розміщеним на рухомому об'єкті, контролер 7, перший вхід якого з'єднаний з виходом додаткового приймача 5, а вихід з'єднаний з пристроєм індикації 8, акумулятори 9, виходи яких з'єднані з передавачем 2, додатковим приймачем 5, другим входом контролера 7, процесором 18 та пристроєм індикації 8, пристрій вводу даних користувача 17 з'єднаний з процесором 18, вихід якого з'єднаний з передавачем 2 керуючий контролер 10, вхід якого з'єднаний з приймачем 4, а виходи з'єднані з додатковим передавачем 3, енергонезалежним зберігачем інформації 11 та пристроєм індикації та зв'язку з персональним комп'ютером 12, джерело живлення 13, вихід якого через підсистему стабілізації живлення 14 з'єднаний з пристроєм індикації та зв'язку з персональним комп'ютером 12, вбудовані акумулятори 15, входи і виходи яких з'єднані з підсистемою стабілізації живлення 14, а також центральну станцію 16, входи і виходи якої з'єднані з пристроєм індикації та зв'язку з персональним комп'ютером 12. Запропонована система працює наступним чином. Користувач вводить необхідні дані через пристрій вводу даних 17, які через процесор 18 потрапляють до передавача 2 у вигляді сигналу. Керуючий контролер 10 приймає інформацію про місцезнаходження рухомого об'єкта 6 від приймача 4, який, в свою чергу, приймає інформацію за допомогою передавача 2 від глобальної супутникової системи 1. Потім керуючий 1 UA 78921 U 5 10 15 20 контролер 10 перетворює прийняту цифрову інформацію про координати рухомого об'єкта 6 у формат, необхідний для подальшого передавання через пристрій індикації та зв'язку з персональним комп'ютером 12 на центральну станцію 16. Живлення системи здійснюється за допомогою джерела живлення 13 або вбудованих акумуляторів 15 через підсистему стабілізації живлення 14. Керуючий контролер 10 визначає поточні координати рухомого об'єкта 6, а також якість прийнятих сигналів від глобальної супутникової системи 1. Інформація про час, координати та якість функціонування приймача 4 передається керуючим контролером 10 через пристрій індикації та зв'язку з персональним комп'ютером 12 на центральну станцію 16, де обробляються дані про місцезнаходження рухомого об'єкта по наперед заданому алгоритму, відображаються на екрані монітора за допомогою засобів картографічної підтримки та формується інформація про необхідний напрямок, швидкість руху та кінцеву точку призначення рухомого об'єкта 6. Сформовані дані передаються з центральної станції 16 через пристрій індикації та зв'язку з персональним комп'ютером 12 на керуючий контролер 10, який перетворює їх у формат, необхідний для подальшого передавання через супутникову систему 1 за допомогою додаткового передавача 3 на додатковий приймач 5, який розміщений на рухомому об'єкті 6. Отримані дані з додаткового приймача 5 передаються на контролер 7, який відображає їх на пристрої індикації 8. Живлення контролера 7, пристрою індикації 8, додаткового приймача 5 та передавача 2 здійснюється за рахунок акумуляторів 9. Таким чином, запропонована система дозволяє користувачу вводити необхідні дані і тим самим забезпечити керування місцезнаходженням рухомого об'єкта. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації, пристроєм індикації та зв'язку з персональним комп'ютером та передавачем, джерело живлення, вихід якого через підсистему стабілізації живлення з'єднаний з пристроєм індикації та зв'язку з персональним комп'ютером, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, а також центральну станцію, входи і виходи якої з'єднані з пристроєм індикації та зв'язку з персональним комп'ютером, рухомий об'єкт, до якого входять передавач, вихід якого з'єднаний з першим входом глобальної супутникової системи, приймач, вхід якого з'єднаний з другим виходом глобальної супутникової системи, контролер, вхід якого з'єднаний з приймачем, а вихід з'єднаний з пристроєм індикації, та акумулятори, виходи яких з'єднані з другим входом контролера, пристроєм індикації, передавачем та приймачем, яка відрізняється тим, що в рухомий об'єкт введений процесор та пристрій вводу даних користувача, вихід якого з'єднаний з першим входом процесора, перший вихід процесора з'єднаний з другим входом пристрою індикації, другий вихід процесора з'єднаний з другим входом передавача, другий вхід процесора з'єднаний з четвертим виходом акумуляторів. 2 UA 78921 U Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for movable object location control
Автори англійськоюKulik Anatolii Stepanovych, Derhachov Kostiantyn Yuriiovych, Listunov Andrii Viktorovych
Назва патенту російськоюСистема управления местонахождением подвижного объекта
Автори російськоюКулик Анатолий Степанович, Дергачов Константин Юрьевич, Листунов Андрей Викторович
МПК / Мітки
МПК: G08G 1/0968
Мітки: керування, місцезнаходженням, система, об'єкта, рухомого
Код посилання
<a href="https://ua.patents.su/5-78921-sistema-keruvannya-misceznakhodzhennyam-rukhomogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Система керування місцезнаходженням рухомого об’єкта</a>
Система керування місцезнаходженням рухомого об’єкта
Номер патенту: 55409
Опубліковано: 10.12.2010
Автори: Кописов Олег Едуардович, Кулік Анатолій Степанович, Гуш Роман Миколайович, Дергачов Костянтин Юрійович
МПК: G08G 1/0968
Мітки: керування, об'єкта, місцезнаходженням, рухомого, система
Формула / Реферат:
Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації та пристроєм індикації та зв'язку з персональним комп'ютером, джерело живлення, вихід якого через підсистему стабілізації живлення з'єднаний з...
Система автоматичного виявлення місцезнаходження рухомого об’єкта
Номер патенту: 55408
Опубліковано: 10.12.2010
Автори: Кулік Анатолій Степанович, Дергачов Костянтин Юрійович, Сосницький Віталій Валерійович
МПК: G01S 3/02
Мітки: рухомого, об'єкта, виявлення, система, місцезнаходження, автоматичного
Формула / Реферат:
Система автоматичного виявлення місцезнаходження рухомого об'єкта, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід...
Система визначення місцезнаходження рухомого об’єкта
Номер патенту: 76139
Опубліковано: 25.12.2012
Автори: Литвиненко Тетяна Вікторівна, Дергачов Костянтин Юрійович, Кулік Анатолій Степанович
МПК: G01S 3/02
Мітки: рухомого, система, визначення, місцезнаходження, об'єкта
Формула / Реферат:
Система визначення місцезнаходження рухомого об'єкта, що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід - з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з...
Система відображення місцезнаходження рухомого об`єкта
Номер патенту: 36559
Опубліковано: 27.10.2008
Автори: Бандура Іван Миколайович, Шишова Наталія Олександрівна, Дергачов Костянтин Юрійович
МПК: G01S 3/02
Мітки: об'єкта, рухомого, відображення, місцезнаходження, система
Формула / Реферат:
Система відображення місцезнаходження рухомого об'єкта, що містить передавач і приймач, які розміщені на рухомому об'єкті, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації та зв'язку з персональним комп'ютером з'єднаний з центральною станцією, яка відрізняється тим, що в додатково введені глобальна супутникова система, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем,...
Система визначення місцеположення рухомих об’єктів
Номер патенту: 76146
Опубліковано: 25.12.2012
Автори: Дергачов Костянтин Юрійович, Кулік Анатолій Степанович, Кошелева Марія Миколаївна
МПК: G01S 3/02
Мітки: місцеположення, визначення, рухомих, об'єктів, система
Формула / Реферат:
Система визначення місцеположення рухомих об'єктів, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з...
Попередній патент: Температурний сканер для електронної контактної термографії
Наступний патент: Спосіб захисту від пилу при підривних роботах у кар’єрах
Випадковий патент: Спосіб лазерно-мікрохірургічного видалення внутрішньомозкових пухлин півкуль великого мозку з медіанним поширенням