Система автоматичного виявлення місцезнаходження рухомих об’єктів
Номер патенту: 79322
Опубліковано: 25.04.2013
Автори: Дергачов Костянтин Юрійович, Кулік Анатолій Степанович, Резник Ігор Сергійович
Формула / Реферат
Система автоматичного виявлення місцезнаходження рухомого об'єкта, що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщено на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднано з виходом джерела живлення та акумулятором, а вихід з'єднано з керуючим контролером, приймачем та акумулятором, радіомодем передачі інформації, входи і виходи якого з'єднані з керуючим контролером і радіомодемом прийому інформації, вихід якого з'єднаний з персональним комп'ютером, яка відрізняється тим, що в неї введені центральний процесор, вхід якого з'єднано з виходом енергонезалежного зберігача інформації, пристрій вводу-виводу, блок оперативної пам'яті, монітор, виходи пристрою вводу-виводу та блока оперативної пам'яті з'єднані з входом центрального процесора, вихід центрального процесора з'єднано з входом монітора, вихід системи стабілізації живлення з'єднано з входами центрального процесора, блока оперативної пам'яті, монітора.
Текст
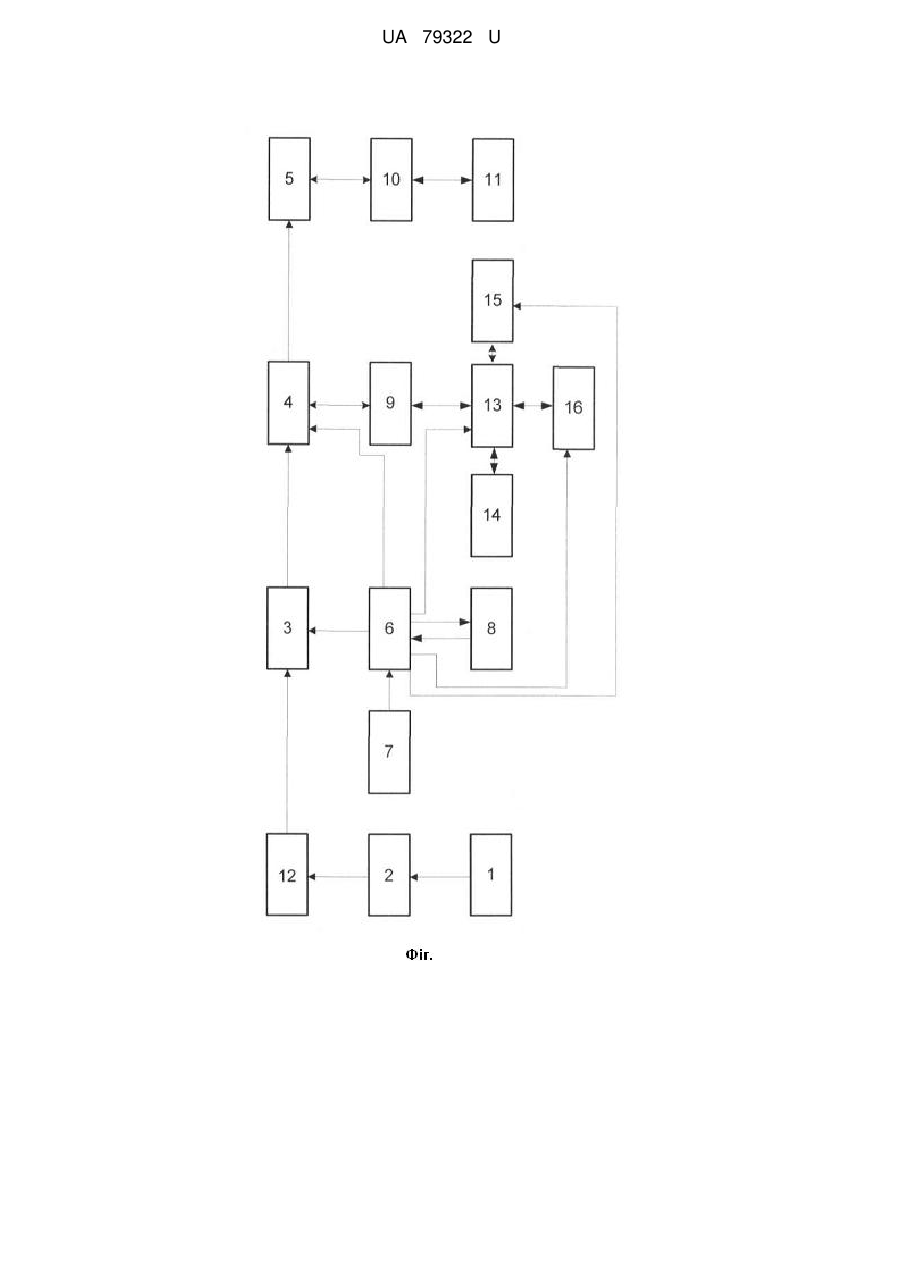
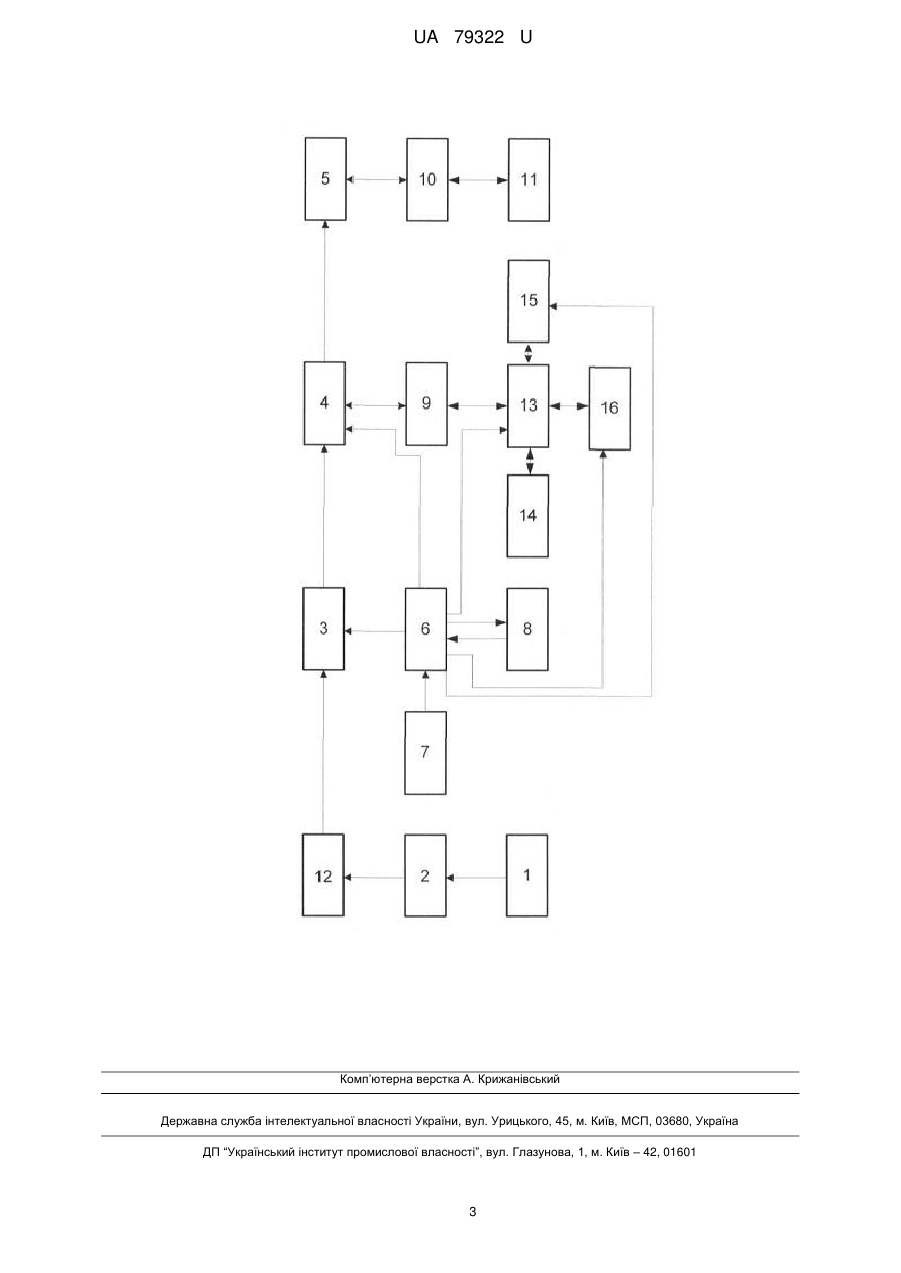
Реферат: UA 79322 U UA 79322 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області навігації і може використовуватись для здійснення оперативного контролю за переміщенням рухомих об'єктів. Відома система відображення місцезнаходження рухомих об'єктів [патент України № 36559 G01S3/02, бюл. № 20, 2008 p.], що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач, який розміщений на рухомому об'єкті, керуючий контролер, входи і виходи якого з'єднані з блоками приймача, підсистеми стабілізації живлення, радіомодема, енергонезалежного зберігача інформації, пристрою індикації та зв'язку з персональним комп'ютером, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, вхід якої з'єднай з джерелом живлення, а також центральну станцію, входи і виходи якої з'єднані з пристроєм індикації та зв'язку з персональним комп'ютером. Недоліком цієї системи є завужені функціональні можливості через неможливість приймати інформацію від рухомого об'єкта та передавати інформацію до рухомого об'єкта на великій відстані. Відома система автоматичного виявлення місцезнаходження рухомого об'єкта, взята як прототип [патент України № 55408 G01S3/02, бюл. № 23, 2010 р], що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з керуючим контролером, приймачем та акумулятором, персональний комп'ютер, GSM радіомодем передачі інформації, входи і виходи якого з'єднані з керуючим контролером і GSM радіомодемом прийому інформації, входи і виходи якого з'єднані з персональним комп'ютером. Недоліком цієї моделі є завужені функціональні можливості через відсутності відображення місцезнаходження на самому рухомому об'єкті. В основу корисної моделі поставлено задачу розширення функціональних можливостей за рахунок відображення, зберігання та оперативного використання необхідної інформації про переміщення об'єкта на борту цього об'єкта. Поставлена задача вирішується тим, що в систему автоматичного виявлення місцезнаходження рухомого об'єкта, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з керуючим контролером, приймачем та акумулятором, радіомодем передачі інформації, входи і виходи якого з'єднані з керуючим контролером і радіомодемом прийому інформації, вихід якого з'єднаний з персональним комп'ютером, згідно з корисною моделлю введені центральний процесор, вхід якого з'єднано з виходом енергонезалежного зберігача інформації, пристрій вводу-виводу, блок оперативної пам'яті, монітор, виходи пристрою вводу-виводу та блока оперативної пам'яті з'єднані з входом центрального процесора, вихід центрального процесора з'єднано з входом монітора, вихід системи стабілізації живлення з'єднано з входами центрального процесора, блока оперативної пам'яті, монітора. На кресленні показана блок-схема системи відображення місцезнаходження рухомого об'єкта. Система автоматичного виявлення місцезнаходження рухомих об'єктів містить глобальну супутникову систему 12, вхід якої з'єднаний з виходом передавача 2, а вихід з'єднаний з приймачем 3, передавач розміщено на рухомому об'єкті 1, керуючий контролер 4, вхід якого з'єднаний з виходом приймача 3, а вихід і вхід з входом і виходом енергонезалежного зберігача інформації 9, систему стабілізації живлення 6, вхід якої з'єднано з виходом джерела живлення 7 та акумулятором 8, а вихід з'єднано з керуючим контролером 4, приймачем 3 та акумулятором 8, радіомодем передачі інформації 5, входи і виходи якого з'єднані з входом керуючого контролера 4, радіомодем прийому інформації 10, входи і виходи якого з'єднані з персональним комп'ютером 11. Вхід і вихід енергонезалежного зберігача інформації 9 з'єднано з входом і виходом центрального процесора 13, до входів і виходів якого під'єднано входи і виходи пристрою вводу-виводу 14, блока оперативної пам'яті 15, монітора 16, входи блока оперативної пам'яті 15 та монітора 16 з'єднані з виходами системи стабілізації живлення 6. Запропонована система працює наступним чином. Глобальна супутникова система 12 та передавач 2 передають інформацію про координати рухомого об'єкта 1 на приймач 3. Прийняту інформацію про координати рухомого об'єкта керуючий контролер 4 перетворює в формат, який далі радіомодем передачі інформації 5 1 UA 79322 U 5 10 передає на радіомодем прийому інформації 10, який прийняту інформацію передає на персональний комп'ютер 11, де дані про місцезнаходження рухомого об'єкта відображаються на екрані монітора за допомогою засобів картографічної підтримки. Живлення системи здійснюється через систему стабілізації живлення 6 за рахунок джерела живлення 7 або через акумулятор 8. Інформація про координати рухомого об'єкта 1 також зберігаються в енергонезалежному зберігачі інформації 9, що обробляється центральним процесором 13 та виводиться на екрані монітора 16 за допомогою засобів картографічної підтримки. Таким чином, запропонована система дозволяє оперативно відображати місцезнаходження рухомих об'єктів як у центрі керування, так і на борту рухомого об'єкта, здійснювати контроль за цими об'єктами, використовувати прийняту інформацію та зберігати її в базах даних. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Система автоматичного виявлення місцезнаходження рухомого об'єкта, що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщено на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднано з виходом джерела живлення та акумулятором, а вихід з'єднано з керуючим контролером, приймачем та акумулятором, радіомодем передачі інформації, входи і виходи якого з'єднані з керуючим контролером і радіомодемом прийому інформації, вихід якого з'єднаний з персональним комп'ютером, яка відрізняється тим, що в неї введені центральний процесор, вхід якого з'єднано з виходом енергонезалежного зберігача інформації, пристрій вводу-виводу, блок оперативної пам'яті, монітор, виходи пристрою вводу-виводу та блока оперативної пам'яті з'єднані з входом центрального процесора, вихід центрального процесора з'єднано з входом монітора, вихід системи стабілізації живлення з'єднано з входами центрального процесора, блока оперативної пам'яті, монітора. 2 UA 79322 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for automatic detection of location of movable objects
Автори англійськоюKulik Anatolii Stepanovych, Derhachov Kostiantyn Yuriiovych, Reznyk Ihor Serhiiovych
Назва патенту російськоюСистема автоматического выявления местонахождения подвижных объектов
Автори російськоюКулик Анатолий Степанович, Дергачев Константин Юрьевич, Резник Игорь Сергеевич
МПК / Мітки
МПК: G01S 3/02
Мітки: рухомих, об'єктів, місцезнаходження, автоматичного, система, виявлення
Код посилання
<a href="https://ua.patents.su/5-79322-sistema-avtomatichnogo-viyavlennya-misceznakhodzhennya-rukhomikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного виявлення місцезнаходження рухомих об’єктів</a>
Система автоматичного виявлення місцезнаходження рухомого об’єкта
Номер патенту: 55408
Опубліковано: 10.12.2010
Автори: Кулік Анатолій Степанович, Сосницький Віталій Валерійович, Дергачов Костянтин Юрійович
МПК: G01S 3/02
Мітки: місцезнаходження, рухомого, автоматичного, об'єкта, система, виявлення
Формула / Реферат:
Система автоматичного виявлення місцезнаходження рухомого об'єкта, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід...
Система визначення місцезнаходження рухомого об’єкта
Номер патенту: 76139
Опубліковано: 25.12.2012
Автори: Дергачов Костянтин Юрійович, Кулік Анатолій Степанович, Литвиненко Тетяна Вікторівна
МПК: G01S 3/02
Мітки: об'єкта, система, місцезнаходження, рухомого, визначення
Формула / Реферат:
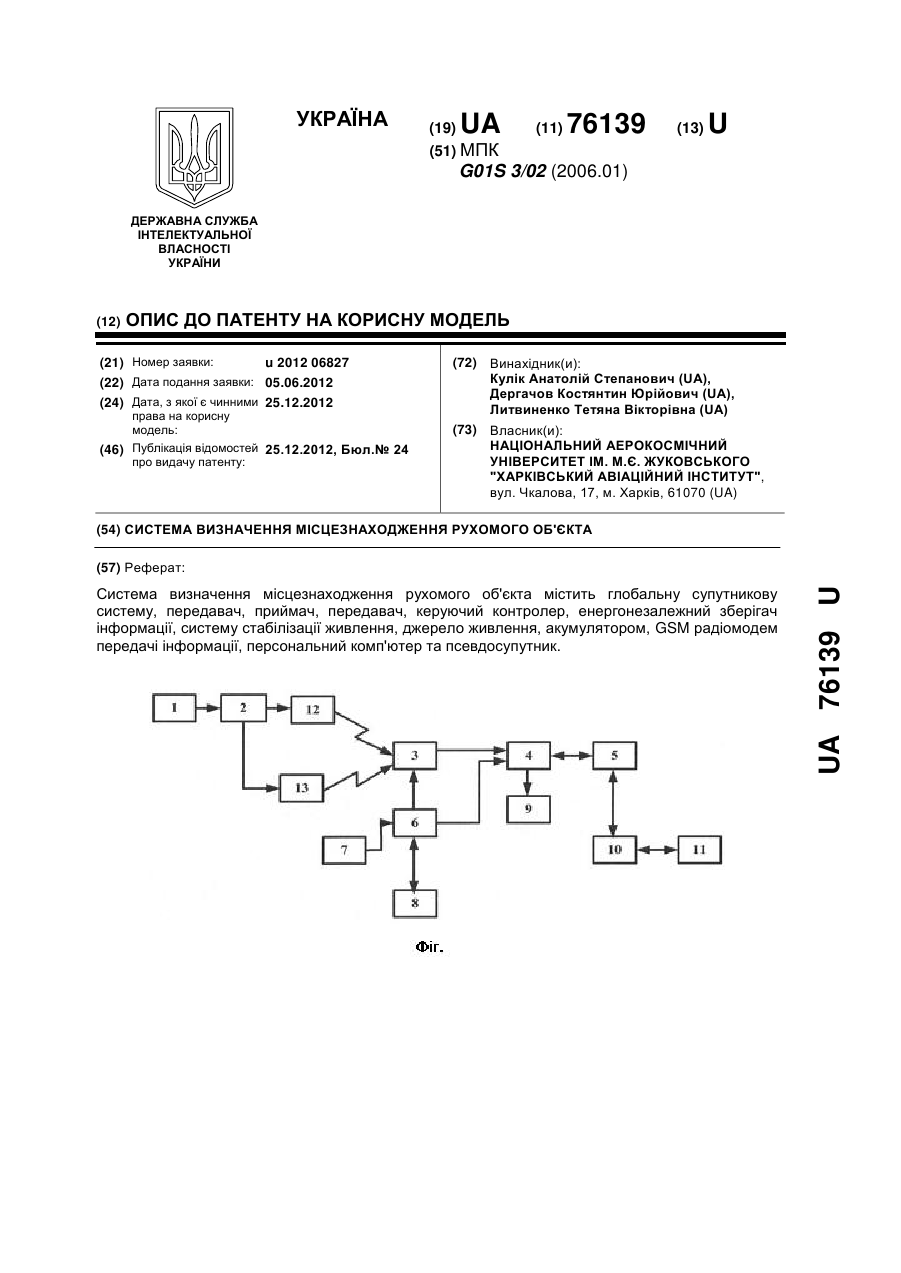
Система визначення місцезнаходження рухомого об'єкта, що містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід - з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з...
Система визначення місцеположення рухомих об’єктів
Номер патенту: 76146
Опубліковано: 25.12.2012
Автори: Кошелева Марія Миколаївна, Кулік Анатолій Степанович, Дергачов Костянтин Юрійович
МПК: G01S 3/02
Мітки: рухомих, визначення, система, об'єктів, місцеположення
Формула / Реферат:
Система визначення місцеположення рухомих об'єктів, яка містить глобальну супутникову систему, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем, передавач розміщений на рухомому об'єкті, керуючий контролер, вхід якого з'єднаний з виходом приймача, а вихід з входом енергонезалежного зберігача інформації, систему стабілізації живлення, вхід якої з'єднаний з виходом джерела живлення та акумулятором, а вихід з'єднаний з...
Система відображення місцезнаходження рухомого об`єкта
Номер патенту: 36559
Опубліковано: 27.10.2008
Автори: Бандура Іван Миколайович, Шишова Наталія Олександрівна, Дергачов Костянтин Юрійович
МПК: G01S 3/02
Мітки: система, місцезнаходження, відображення, рухомого, об'єкта
Формула / Реферат:
Система відображення місцезнаходження рухомого об'єкта, що містить передавач і приймач, які розміщені на рухомому об'єкті, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації та зв'язку з персональним комп'ютером з'єднаний з центральною станцією, яка відрізняється тим, що в додатково введені глобальна супутникова система, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем,...
Система керування місцезнаходженням рухомого об’єкта
Номер патенту: 55409
Опубліковано: 10.12.2010
Автори: Кописов Олег Едуардович, Кулік Анатолій Степанович, Гуш Роман Миколайович, Дергачов Костянтин Юрійович
МПК: G08G 1/0968
Мітки: об'єкта, керування, система, рухомого, місцезнаходженням
Формула / Реферат:
Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації та пристроєм індикації та зв'язку з персональним комп'ютером, джерело живлення, вихід якого через підсистему стабілізації живлення з'єднаний з...
Попередній патент: Система для перетворення енергії хвиль в електричну енергію
Наступний патент: Штам соматичних структур дереворуйнівного базидіоміцета daedalеa quercina (l.) pers. dq-08 – продуцент екзопродуктів перекисного окиснення ліпідів
Випадковий патент: Спосіб виготовлення корозійних препаратів судинної системи порожнистого органа