Спосіб розстановки лопаток ротора турбомашини
Формула / Реферат
1. Спосіб розстановки лопаток ротора турбомашини, згідно з яким спочатку вимірюють радіальний і тангенціальний статичні моменти множини лопаток, призначених для оснащення цього ротора, потім ці лопатки класифікують у пари за критерієм вибору, обумовленим в залежності від значень двох зазначених заздалегідь виміряних статичних моментів, і, на закінчення, лопатки вибраних пар послідовно встановлюють на роторі з діаметрально протилежним розташуванням лопаток пари.
2. Спосіб розстановки лопаток ротора турбомашини за п. 1, який відрізняється тим, що зазначений критерій вибору полягає у визначенні для двох даних лопаток одночасно різниці їх радіальних статичних моментів і різниці їх тангенціальних статичних моментів і в перевірці того, що ці дві різниці не перевищують відповідно першого заздалегідь визначеного значення і другого заздалегідь визначеного значення.
3. Спосіб розстановки лопаток ротора турбомашини за п. 2, який відрізняється тим, що перше заздалегідь визначене значення складає 2.10-4кгм.
4. Спосіб розстановки лопаток ротора турбомашини за п. 2, який відрізняється тим, що друге заздалегідь визначене значення складає 4.10-4кгм.
5. Спосіб розстановки лопаток ротора турбомашини за п. 1, який відрізняється тим, що додатково вимірюють осьовий статичний момент лопаток вказаної множини і класифікацію в пари проводять з додатковим урахуванням виміряного осьового статичного моменту.
6. Спосіб розстановки лопаток ротора турбомашини за п. 2 чи 5, який відрізняється тим, що зазначений критерій вибору додатково полягає у визначенні для двох даних лопаток різниці їх осьових статичних моментів і в перевірці того, що вона не перевищує третього заздалегідь визначеного значення.
7. Спосіб розстановки лопаток ротора турбомашини за п. 6, який відрізняється тим, що третє заздалегідь визначене значення складає 4.10-4кгм.
8. Спосіб розстановки лопаток ротора турбомашини за п. 5, який відрізняється тим, що додатково обчислюють сумарний статичний момент лопаток вказаної множини, а класифікацію в пари виконують з урахуванням обчисленого сумарного статичного моменту.
9. Спосіб розстановки лопаток ротора турбомашини за п. 8, який відрізняється тим, що вказаний критерій вибору полягає у визначенні дисбалансу залишкових радіального, тангенціального й осьового статичних моментів множини лопаток і перевірці того, що він не перевищує четвертого заздалегідь визначеного значення.
10. Спосіб розстановки лопаток ротора турбомашини за п. 9, який відрізняється тим, що четверте заздалегідь визначене значення складає 1.10-4кгм.
Текст
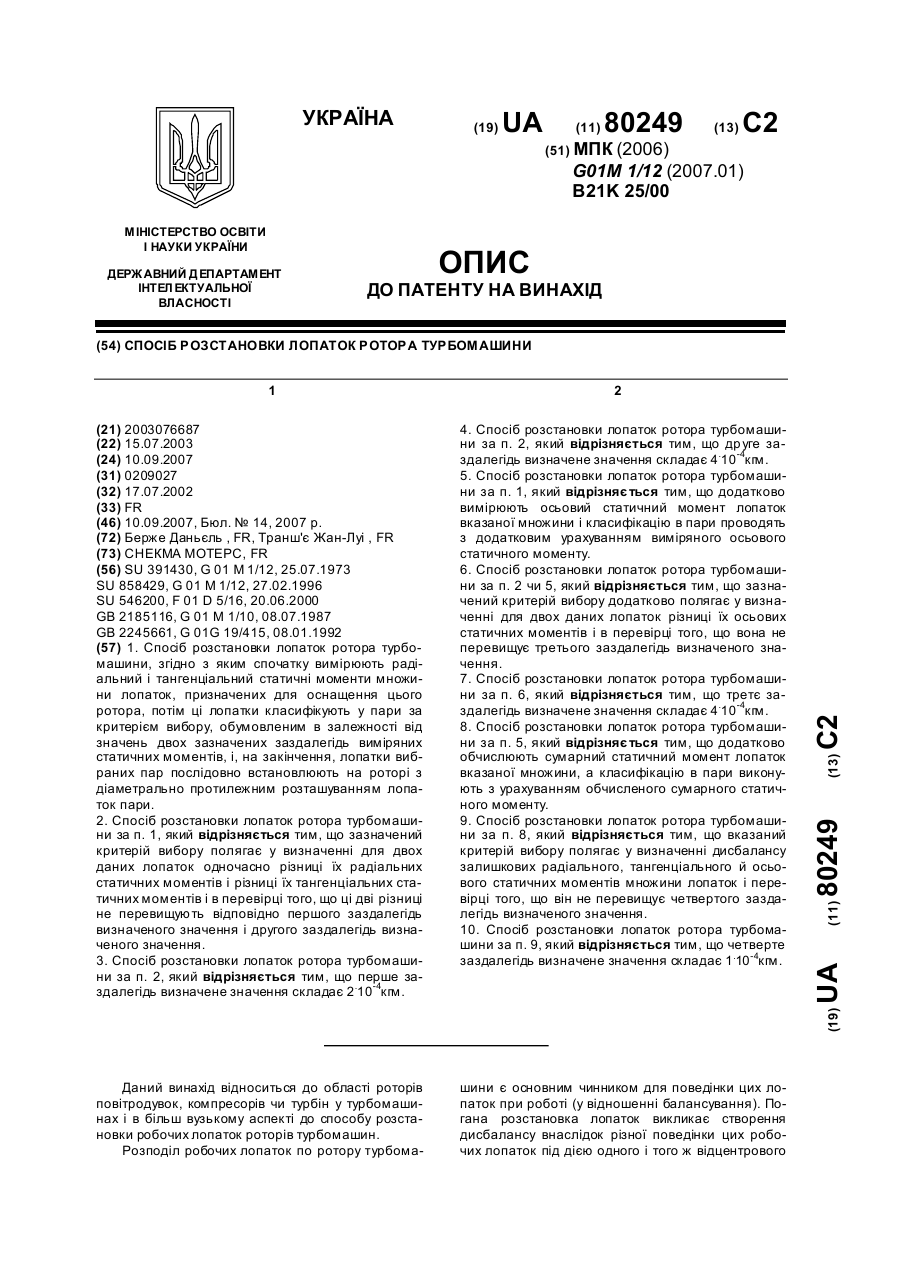
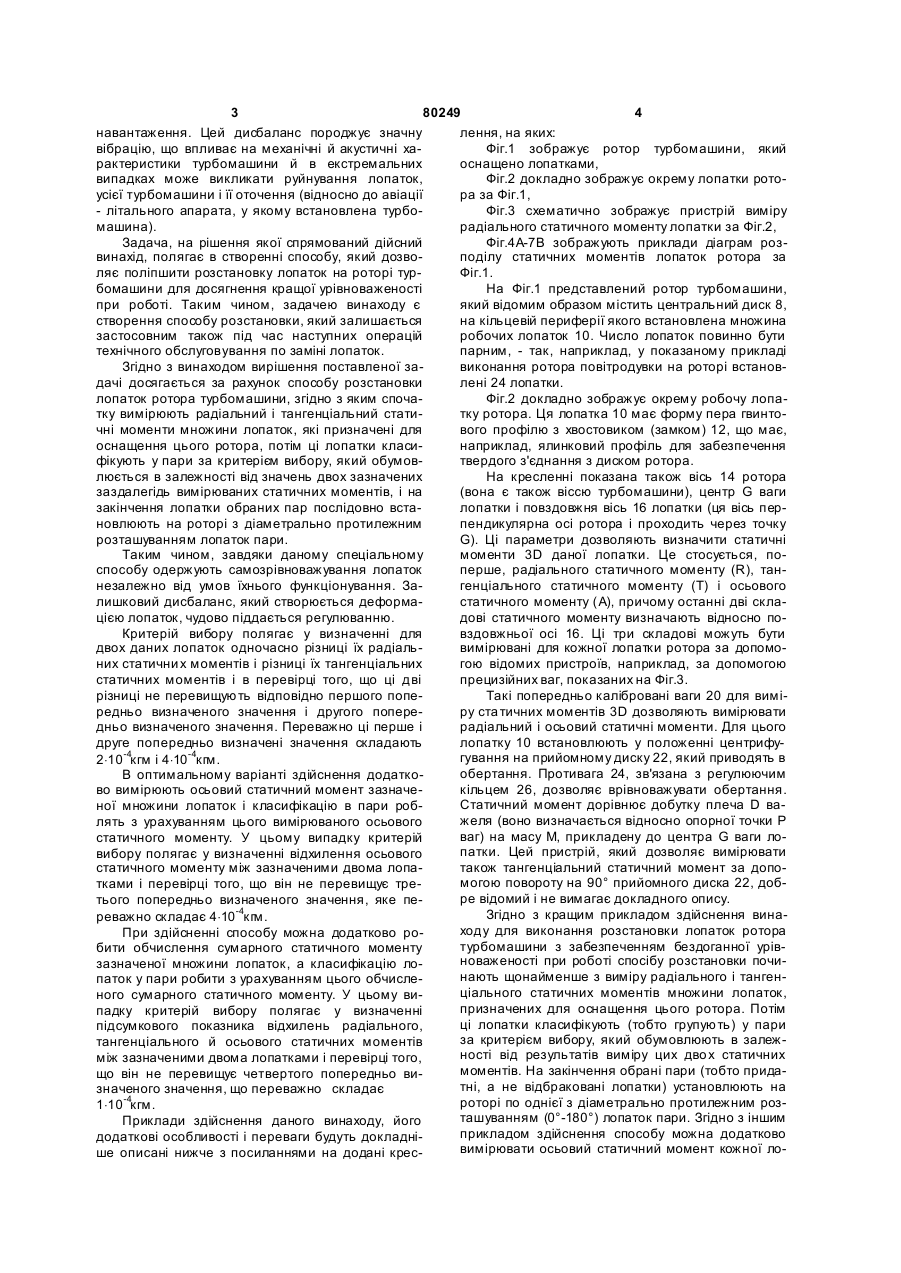
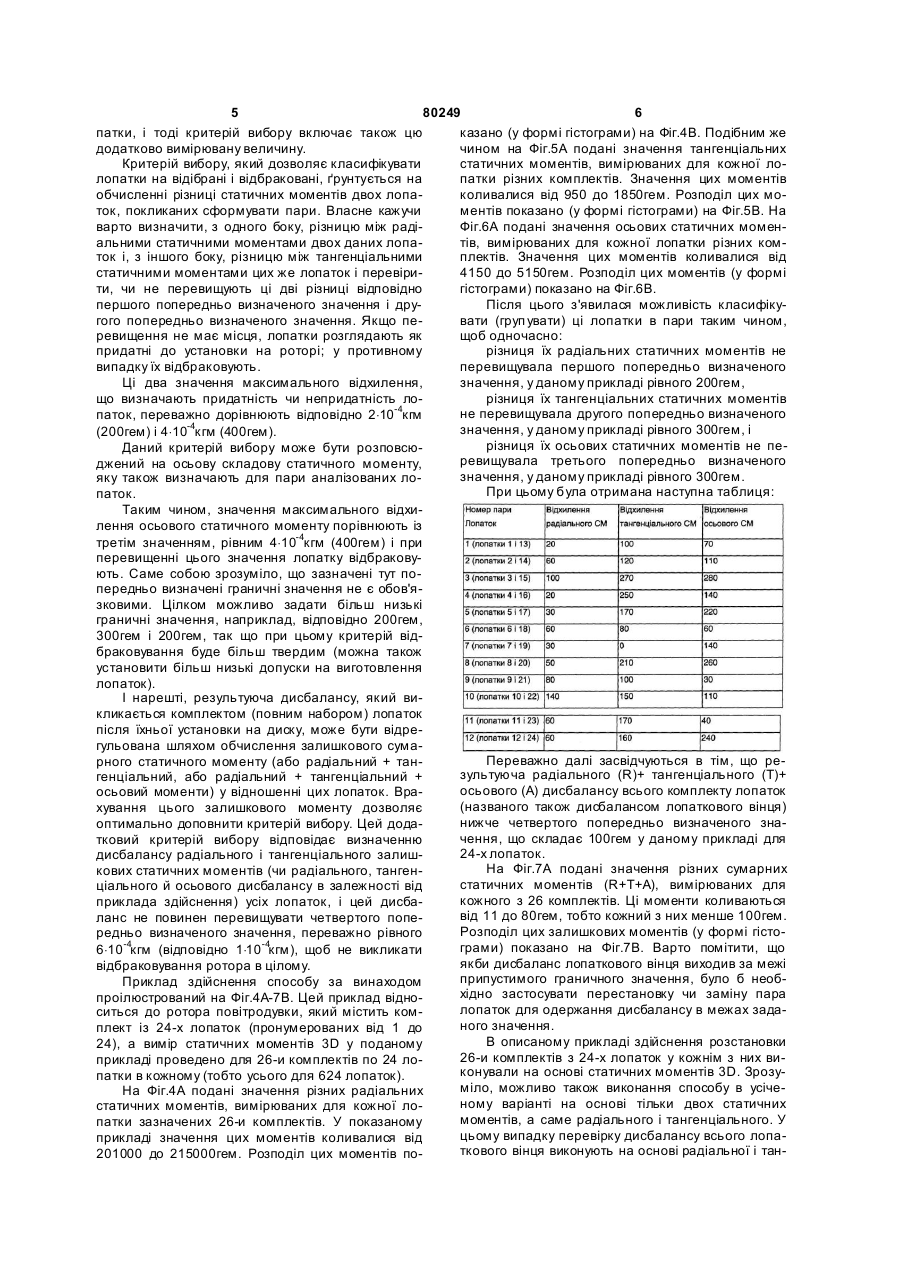
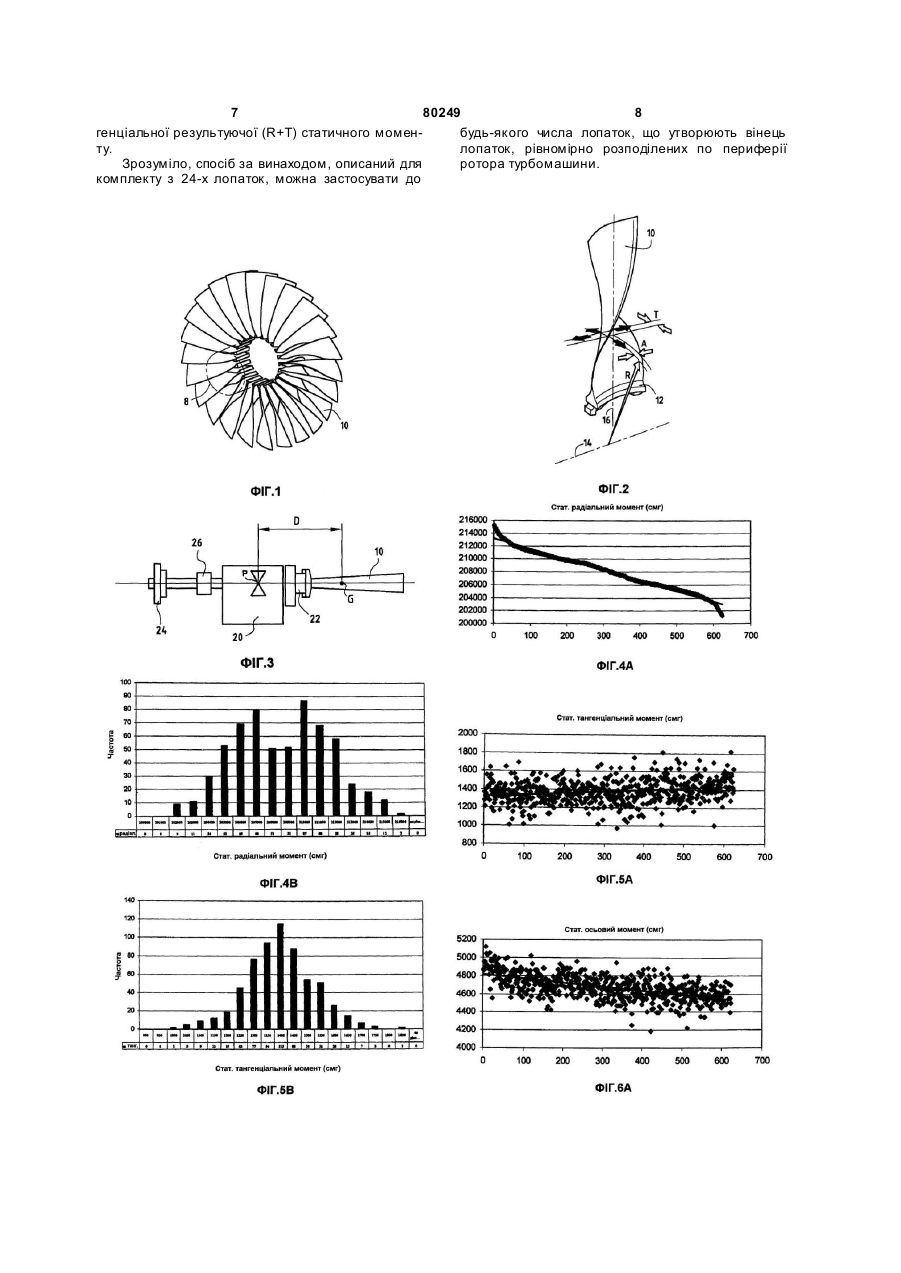
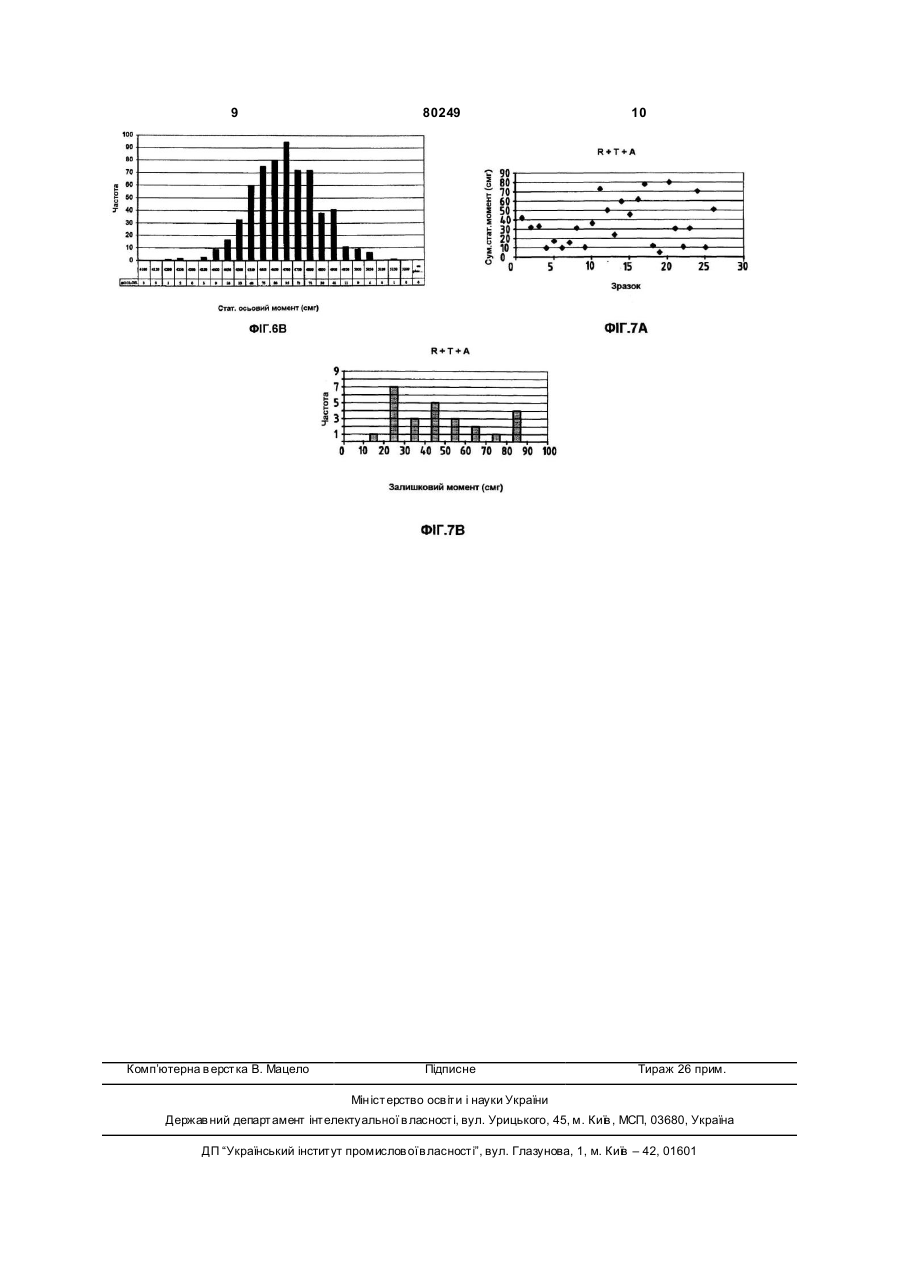
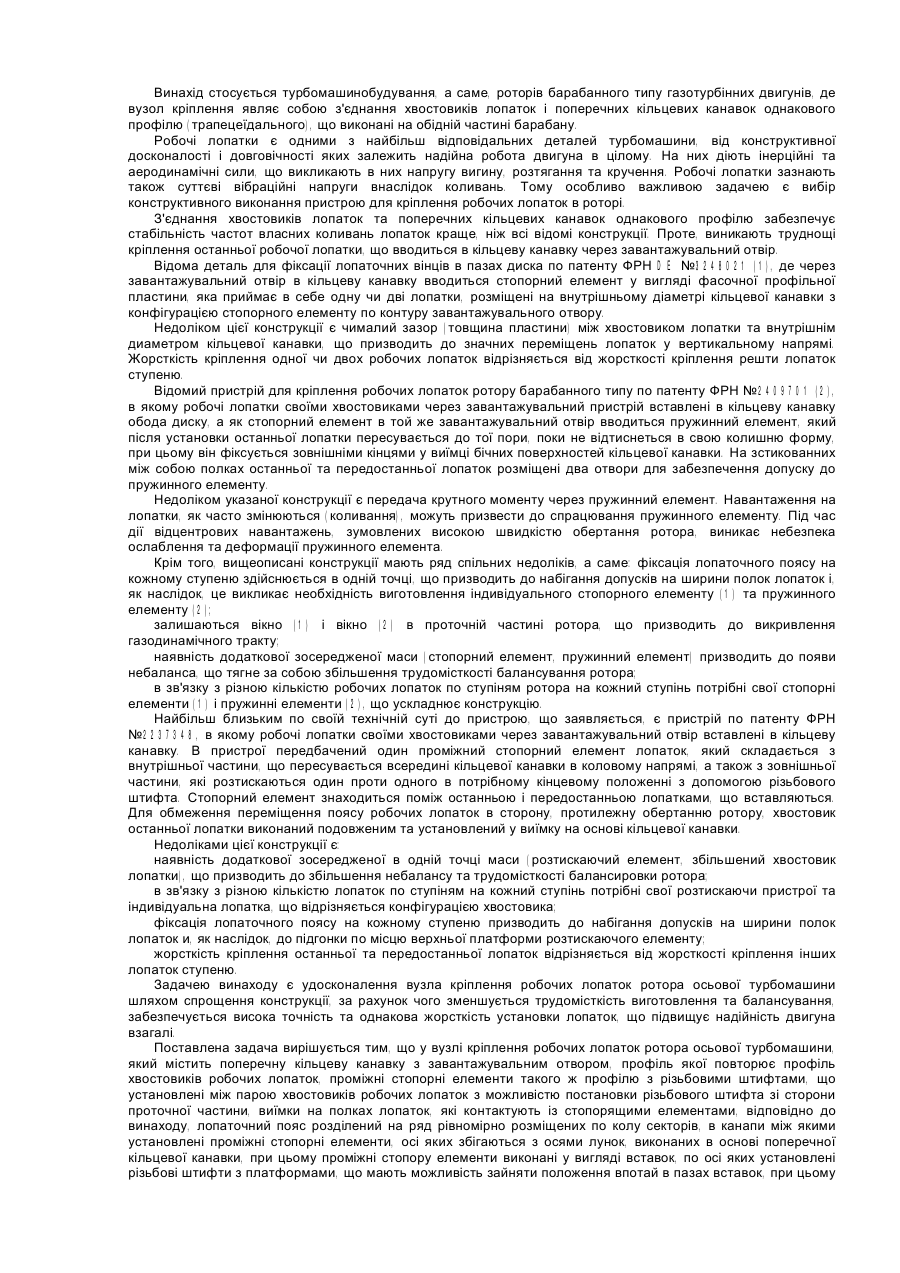
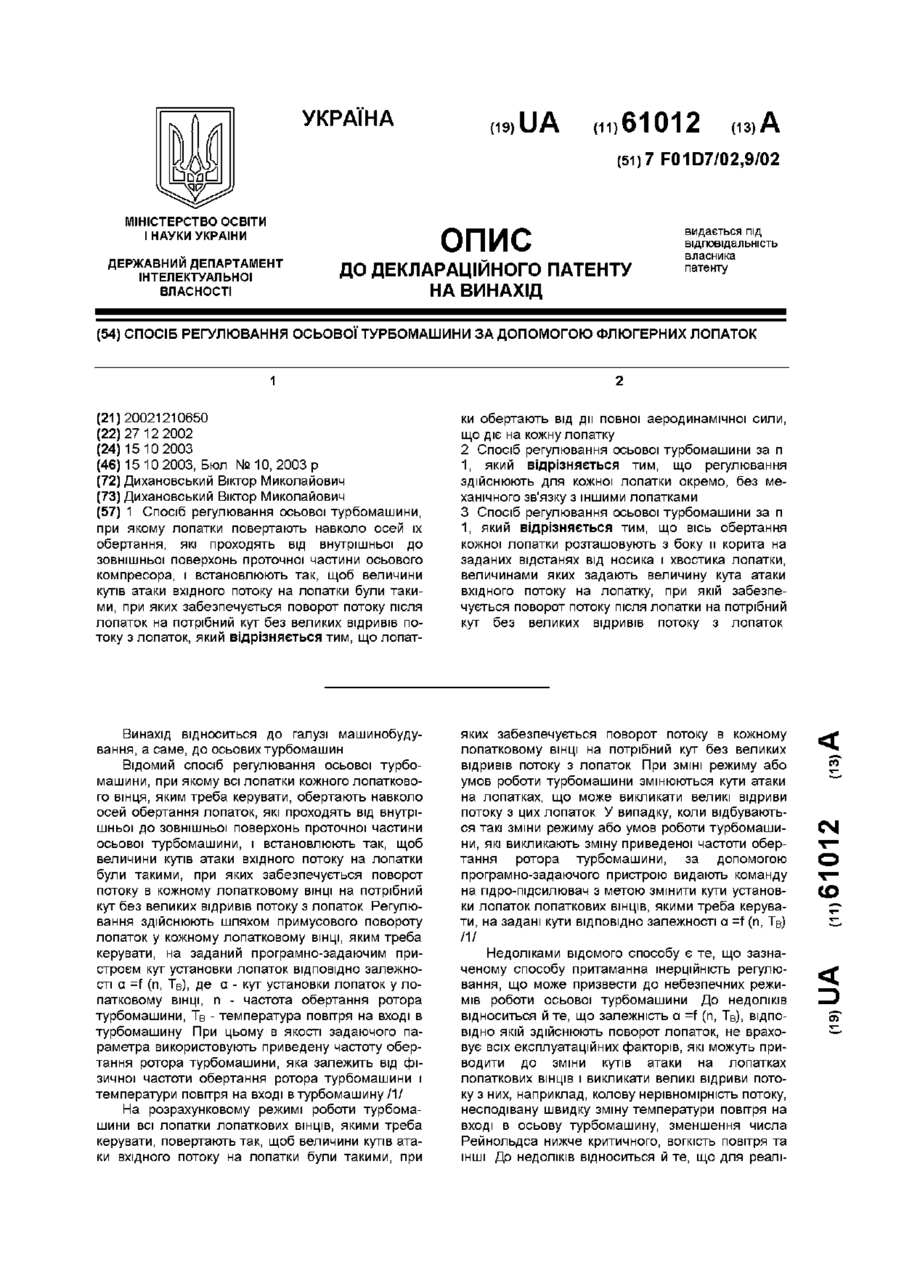
1. Спосіб розстановки лопаток ротора турбомашини, згідно з яким спочатку вимірюють радіальний і тангенціальний статичні моменти множини лопаток, призначених для оснащення цього ротора, потім ці лопатки класифікують у пари за критерієм вибору, обумовленим в залежності від значень двох зазначених заздалегідь виміряних статичних моментів, і, на закінчення, лопатки вибраних пар послідовно встановлюють на роторі з діаметрально протилежним розташуванням лопаток пари. 2. Спосіб розстановки лопаток ротора турбомашини за п. 1, який відрізняється тим, що зазначений критерій вибору полягає у визначенні для двох даних лопаток одночасно різниці їх радіальних статичних моментів і різниці їх тангенціальних статичних моментів і в перевірці того, що ці дві різниці не перевищують відповідно першого заздалегідь визначеного значення і другого заздалегідь визначеного значення. 3. Спосіб розстановки лопаток ротора турбомашини за п. 2, який відрізняється тим, що перше заздалегідь визначене значення складає 2.10-4кгм. C2 2 UA 1 3 80249 4 навантаження. Цей дисбаланс породжує значну лення, на яких: вібрацію, що впливає на механічні й акустичні хаФіг.1 зображує ротор турбомашини, який рактеристики турбомашини й в екстремальних оснащено лопатками, випадках може викликати руйнування лопаток, Фіг.2 докладно зображує окрему лопатки ротоусієї турбомашини і її оточення (відносно до авіації ра за Фіг.1, - літального апарата, у якому встановлена турбоФіг.3 схематично зображує пристрій виміру машина). радіального статичного моменту лопатки за Фіг.2, Задача, на рішення якої спрямований дійсний Фіг.4А-7В зображують приклади діаграм розвинахід, полягає в створенні способу, який дозвоподілу статичних моментів лопаток ротора за ляє поліпшити розстановку лопаток на роторі турФіг.1. бомашини для досягнення кращої урівноваженості На Фіг.1 представлений ротор турбомашини, при роботі. Таким чином, задачею винаходу є який відомим образом містить центральний диск 8, створення способу розстановки, який залишається на кільцевій периферії якого встановлена множина застосовним також під час наступних операцій робочих лопаток 10. Число лопаток повинно бути технічного обслуговування по заміні лопаток. парним, - так, наприклад, у показаному прикладі Згідно з винаходом вирішення поставленої завиконання ротора повітродувки на роторі встановдачі досягається за рахунок способу розстановки лені 24 лопатки. лопаток ротора турбомашини, згідно з яким спочаФіг.2 докладно зображує окрему робочу лопатку вимірюють радіальний і тангенціальний статитку ротора. Ця лопатка 10 має форму пера гвинточні моменти множини лопаток, які призначені для вого профілю з хвостовиком (замком) 12, що має, оснащення цього ротора, потім ці лопатки класинаприклад, ялинковий профіль для забезпечення фікують у пари за критерієм вибору, який обумовтвердого з'єднання з диском ротора. люється в залежності від значень двох зазначених На кресленні показана також вісь 14 ротора заздалегідь вимірюваних статичних моментів, і на (вона є також віссю турбомашини), центр G ваги закінчення лопатки обраних пар послідовно всталопатки і повздовжня вісь 16 лопатки (ця вісь перновлюють на роторі з діаметрально протилежним пендикулярна осі ротора і проходить через точку розташуванням лопаток пари. G). Ці параметри дозволяють визначити статичні Таким чином, завдяки даному спеціальному моменти 3D даної лопатки. Це стосується, поспособу одержують самозрівноважування лопаток перше, радіального статичного моменту (R), таннезалежно від умов їхнього функціонування. Загенціального статичного моменту (Т) і осьового лишковий дисбаланс, який створюється деформастатичного моменту (А), причому останні дві склацією лопаток, чудово піддається регулюванню. дові статичного моменту визначають відносно поКритерій вибору полягає у визначенні для вздовжньої осі 16. Ці три складові можуть бути двох даних лопаток одночасно різниці їх радіальвимірювані для кожної лопатки ротора за допомоних статични х моментів і різниці їх тангенціальних гою відомих пристроїв, наприклад, за допомогою статичних моментів і в перевірці того, що ці дві прецизійних ваг, показаних на Фіг.3. різниці не перевищують відповідно першого попеТакі попередньо калібровані ваги 20 для виміредньо визначеного значення і другого попереру ста тичних моментів 3D дозволяють вимірювати дньо визначеного значення. Переважно ці перше і радіальний і осьовий статичні моменти. Для цього друге попередньо визначені значення складають лопатку 10 встановлюють у положенні центрифугування на прийомному диску 22, який приводять в 2×10-4кгм і 4×10-4кгм. обертання. Противага 24, зв'язана з регулюючим В оптимальному варіанті здійснення додатково вимірюють осьовий статичний момент зазначекільцем 26, дозволяє врівноважувати обертання. Статичний момент дорівнює добутку плеча D ваної множини лопаток і класифікацію в пари робжеля (воно визначається відносно опорної точки Ρ лять з урахуванням цього вимірюваного осьового ваг) на масу М, прикладену до центра G ваги лостатичного моменту. У цьому випадку критерій патки. Цей пристрій, який дозволяє вимірювати вибору полягає у визначенні відхилення осьового статичного моменту між зазначеними двома лопатакож тангенціальний статичний момент за допомогою повороту на 90° прийомного диска 22, добтками і перевірці того, що він не перевищує трере відомий і не вимагає докладного опису. тього попередньо визначеного значення, яке пеЗгідно з кращим прикладом здійснення винареважно складає 4×10-4кгм. ходу для виконання розстановки лопаток ротора При здійсненні способу можна додатково ротурбомашини з забезпеченням бездоганної урівбити обчислення сумарного статичного моменту новаженості при роботі спосібу розстановки почизазначеної множини лопаток, а класифікацію лонають щонайменше з виміру радіального і тангенпаток у пари робити з урахуванням цього обчислеціального статичних моментів множини лопаток, ного сумарного статичного моменту. У цьому випризначених для оснащення цього ротора. Потім падку критерій вибору полягає у визначенні ці лопатки класифікують (тобто групують) у пари підсумкового показника відхилень радіального, за критерієм вибору, який обумовлюють в залежтангенціального й осьового статичних моментів ності від результатів виміру цих дво х статичних між зазначеними двома лопатками і перевірці того, моментів. На закінчення обрані пари (тобто придащо він не перевищує четвертого попередньо витні, а не відбраковані лопатки) установлюють на значеного значення, що переважно складає роторі по однієї з діаметрально протилежним роз1×10-4кгм. ташуванням (0°-180°) лопаток пари. Згідно з іншим Приклади здійснення даного винаходу, його прикладом здійснення способу можна додатково додаткові особливості і переваги будуть докладнівимірювати осьовий статичний момент кожної лоше описані нижче з посиланнями на додані крес 5 80249 6 патки, і тоді критерій вибору включає також цю казано (у формі гістограми) на Фіг.4В. Подібним же додатково вимірювану величину. чином на Фіг.5А подані значення тангенціальних Критерій вибору, який дозволяє класифікувати статичних моментів, вимірюваних для кожної лолопатки на відібрані і відбраковані, ґрунтується на патки різних комплектів. Значення цих моментів обчисленні різниці статичних моментів двох лопаколивалися від 950 до 1850гем. Розподіл цих моток, покликаних сформувати пари. Власне кажучи ментів показано (у формі гістограми) на Фіг.5В. На варто визначити, з одного боку, різницю між радіФіг.6А подані значення осьових статичних моменальними статичними моментами двох даних лопатів, вимірюваних для кожної лопатки різних комток і, з іншого боку, різницю між тангенціальними плектів. Значення цих моментів коливалися від статичними моментами цих же лопаток і перевіри4150 до 5150гем. Розподіл цих моментів (у формі ти, чи не перевищують ці дві різниці відповідно гістограми) показано на Фіг.6В. першого попередньо визначеного значення і друПісля цього з'явилася можливість класифікугого попередньо визначеного значення. Якщо певати (груп увати) ці лопатки в пари таким чином, ревищення не має місця, лопатки розглядають як щоб одночасно: придатні до установки на роторі; у противному різниця їх радіальних статичних моментів не випадку їх відбраковують. перевищувала першого попередньо визначеного Ці два значення максимального відхилення, значення, у даному прикладі рівного 200гем, що визначають придатність чи непридатність лорізниця їх тангенціальних статичних моментів не перевищувала другого попередньо визначеного паток, переважно дорівнюють відповідно 2×10-4кгм значення, у даному прикладі рівного 300гем, і (200гем) і 4×10-4кгм (400гем). різниця їх осьових статичних моментів не пеДаний критерій вибору може бути розповсюревищувала третього попередньо визначеного джений на осьову складову статичного моменту, значення, у даному прикладі рівного 300гем. яку також визначають для пари аналізованих лоПри цьому була отримана наступна таблиця: паток. Таким чином, значення максимального відхилення осьового статичногомоменту порівнюють із третім значенням, рівним 4×10-4кгм (400гем) і при перевищенні цього значення лопатку відбраковують. Саме собою зрозуміло, що зазначені тут попередньо визначені граничні значення не є обов'язковими. Цілком можливо задати більш низькі граничні значення, наприклад, відповідно 200гем, 300гем і 200гем, так що при цьому критерій відбраковування буде більш твердим (можна також установити більш низькі допуски на виготовлення лопаток). І нарешті, результуюча дисбалансу, який викликається комплектом (повним набором) лопаток після їхньої установки на диску, може бути відрегульована шляхом обчислення залишкового сумаПереважно далі засвідчуються в тім, що рерного статичного моменту (або радіальний + танзультуюча радіального (R)+ тангенціального (Т)+ генціальний, або радіальний + тангенціальний + осьового (А) дисбалансу всього комплекту лопаток осьовий моменти) у відношенні цих лопаток. Вра(названого також дисбалансом лопаткового вінця) хування цього залишкового моменту дозволяє нижче четвертого попередньо визначеного знаоптимально доповнити критерій вибору. Цей додачення, що складає 100гем у даному прикладі для тковий критерій вибору відповідає визначенню 24-х лопаток. дисбалансу радіального і тангенціального залишНа Фіг.7А подані значення різних сумарних кових статичних моментів (чи радіального, тангенстатичних моментів (R+Τ+А), вимірюваних для ціального й осьового дисбалансу в залежності від кожного з 26 комплектів. Ці моменти коливаються приклада здійснення) усіх лопаток, і цей дисбавід 11 до 80гем, тобто кожний з них менше 100гем. ланс не повинен перевищувати четвертого попеРозподіл цих залишкових моментів (у формі гісторедньо визначеного значення, переважно рівного грами) показано на Фіг.7В. Варто помітити, що 6×10-4кгм (відповідно 1×10-4кгм), щоб не викликати якби дисбаланс лопаткового вінця виходив за межі відбраковування ротора в цілому. припустимого граничного значення, було б необПриклад здійснення способу за винаходом хідно застосувати перестановку чи заміну пара проілюстрований на Фіг.4А-7В. Цей приклад віднолопаток для одержання дисбалансу в межах задаситься до ротора повітродувки, який містить комного значення. плект із 24-х лопаток (пронумерованих від 1 до В описаному прикладі здійснення розстановки 24), а вимір статичних моментів 3D у поданому 26-и комплектів з 24-х лопаток у кожнім з них виприкладі проведено для 26-и комплектів по 24 локонували на основі статичних моментів 3D. Зрозупатки в кожному (тобто усього для 624 лопаток). міло, можливо також виконання способу в усічеНа Фіг.4А подані значення різних радіальних ному варіанті на основі тільки двох статичних статичних моментів, вимірюваних для кожної ломоментів, а саме радіального і тангенціального. У патки зазначених 26-и комплектів. У показаному цьому випадку перевірку дисбалансу всього лопаприкладі значення цих моментів коливалися від ткового вінця виконують на основі радіальної і тан201000 до 215000гем. Розподіл цих моментів по 7 80249 8 генціальної результуючої (R+Т) статичного моменбудь-якого числа лопаток, що утворюють вінець ту. лопаток, рівномірно розподілених по периферії Зрозуміло, спосіб за винаходом, описаний для ротора турбомашини. комплекту з 24-х лопаток, можна застосувати до 9 Комп’ютерна в ерстка В. Мацело 80249 Підписне 10 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for arranging blades of a turbine rotor
Автори англійськоюBerget Daniel, Transhiet Jean-Luis
Назва патенту російськоюСпособ расположения лопаток ротора турбины
Автори російськоюБерже Даниэль, Траншье Жан-Луи
МПК / Мітки
МПК: B21K 25/00, G01M 1/12
Мітки: спосіб, ротора, турбомашині, розстановки, лопаток
Код посилання
<a href="https://ua.patents.su/5-80249-sposib-rozstanovki-lopatok-rotora-turbomashini.html" target="_blank" rel="follow" title="База патентів України">Спосіб розстановки лопаток ротора турбомашини</a>
Вузол кріплення робочих лопаток ротора осьової турбомашини та спосіб його складання
Номер патенту: 66385
Опубліковано: 17.05.2004
Автори: Спіцин Володимир Євгенійович, Лисенко Валентин Микитович, Зубрицька Інна Аркадіївна
МПК: F01D 5/00
Мітки: лопаток, вузол, складання, ротора, кріплення, турбомашині, осьової, робочих, спосіб
Формула / Реферат:
1. Вузол кріплення робочих лопаток ротора осьової турбомашини, який містить поперечну кільцеву канавку з завантажувальним отвором, профіль якої повторює профіль хвостовиків робочих лопаток, проміжні стопорні елементи такого ж профілю з різьбовими штифтами, що установлені між парою хвостовиків робочих лопаток з можливістю постановки різьбового штифта зі сторони проточної частини, виїмки на полицях лопаток, що контактують із стопорними...
Спосіб регулювання осьової турбомашини за допомогою флюгерних лопаток
Номер патенту: 61012
Опубліковано: 15.10.2003
Автор: Дихановський Віктор Миколайович
Мітки: флюгерних, осьової, спосіб, лопаток, турбомашині, регулювання, допомогою
Формула / Реферат:
1. Спосіб регулювання осьової турбомашини, при якому лопатки повертають навколо осей їх обертання, які проходять від внутрішньої до зовнішньої поверхонь проточної частини осьового компресора, і встановлюють так, щоб величини кутів атаки вхідного потоку на лопатки були такими, при яких забезпечується поворот потоку після лопаток на потрібний кут без великих відривів потоку з лопаток, який відрізняється тим, що лопатки обертають від дії повної...
Вузол кріплення робочих лопаток турбомашини
Номер патенту: 55534
Опубліковано: 15.04.2003
Автори: Лисенко Валентин Микитович, Спіцин Володимир Євгенійович, Бербер Людмила Саідівна
МПК: F01D 5/00
Мітки: турбомашині, робочих, вузол, лопаток, кріплення
Формула / Реферат:
1. Вузол кріплення робочих лопаток турбомашини, який містить стопорне розрізне кільце, розміщене в пазу диска та прорізях в хвостовиках робочих лопаток, що утворюють спільну кільцеву канавку, зафіксоване від прокручування стопорним елементом, розміщеним в отворі на торці диска, який відрізняється тим, що стопорний елемент виконаний у вигляді пластинки з виступом, яка установлена в спільну кільцеву канавку з внутрішньої сторони виступом в...
Спосіб випробування лопаток турбомашини на утомленість
Номер патенту: 15679
Опубліковано: 30.06.1997
Автори: Мєкердичан Леонід Петрович, Заставська Олена Вікторовна, Степанов Микола Васильович, Резнік Михайло Іванович
МПК: G01M 3/04
Мітки: утомленість, спосіб, випробування, лопаток, турбомашині
Формула / Реферат:
(57) Способ испытания лопаток турбомашины на усталость путем размещения хвостовика лопатки в элементах крепления приспособления, установку последнего на вибростенде с последующим возбуждением колебаний, отличающийся тем, что при выполнении элементов крепления упругими, дополнительно устанавливают периферийное сечение пера лопаток в элемент крепления, а колебания осуществляют с заданной частотой по основному тону для 2-х опорной схемы...
Механізм повороту лопаток осьової турбомашини
Номер патенту: 78798
Опубліковано: 25.04.2007
Автори: Смірнов Станіслав Іванович, Жирицький Олександр Олегович, Спіцин Володимир Евгенівич, Конєв Валерій Іванович
МПК: F04D 29/66, F04D 29/40
Мітки: турбомашині, лопаток, повороту, осьової, механізм
Формула / Реферат:
Механізм повороту лопаток осьової турбомашини, який містить лопатки, які встановлені зовнішніми циліндричними цапфами в корпус компресора через антифрикційні втулки, з важелями, що з’єднують цапфи лопаток із синхронізуючим кільцем, встановленим через ролики на корпус компресора, який відрізняється тим, що важелі виконані у вигляді пружних пластин із двома відігнутими кінцями, один з яких входить в паз, прорізаний у зовнішній цапфі лопатки, а...
Попередній патент: Пристрій для прокладдання кабелів та/або проводів на рейковому транспортному засобі
Наступний патент: Інгібітори крузипану та інших цистеїнових протеаз
Випадковий патент: Спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра