Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 8150
Опубліковано: 15.07.2005
Автори: Жукова Маргарита Василівна, Копитко Ігор Йосипович, Саричев Юрій Олексійович, Якорнов Євгеній Аркадійович, Авдєєнко Гліб Леонідович
Формула / Реферат
Система для супроводження рухомих об'єктів з використанням глобальної супутникової системи радіонавігації, що містить центральний пост у складі робочої станції з двома приймально-передавальними антенами, що складається з каскадно з'єднаних приймача з датчиком команд і пристрою обробки, перший вихід якого з'єднаний з першим входом приймача з датчиком команд, блока управління, вхід якого з'єднаний з першим виходом робочої станції, який є другим виходом пристрою обробки, а вихід з'єднаний з другим входом приймача з датчиком команд, і індикатора, вхід котрого з'єднаний з другим виходом робочої станції, який є третім виходом пристрою обробки, причому вихід приймача з датчиком команд з'єднаний з входом пристрою обробки, лінії зв'язку, на які надходять сигнали з виходу радіомодема, супроводжуваний рухомий об'єкт у складі виконавчого пристрою з 1...N виходами, вихід якого з'єднаний з відповідними входами першого і другого комутаторів, GPS-датчика, що приймає й обробляє сигнали штучних супутників землі глобальної супутникової системи радіонавігації, які попадають у ширококутову діаграму направленості його антени, вхід якого з'єднаний з відповідними виходами першого і другого комутаторів, радіомодема, перший вихід якого з'єднаний зі входом виконавчого пристрою, а другий з'єднаний з першим входом логічного елемента і зі входом виконавчого пристрою, причому перший вхід радіомодема є виходом GPS-датчика, радіодатчика, вхід котрого є виходом виконавчого пристрою і який випромінює радіосигнал, а в позаштатній ситуації і індивідуальний код об'єкта і дві схеми заглушення навмисних активних завад, кожна з яких має лінійну розріджену антенну решітку, два настроювальних атенюатори, два поглинаючих балансних навантаження, суматор, мостовий суматор, регульований атенюатор, фазообертач, перша схема - два, а друга - три комутатори, крім того, друга схема заглушення навмисних активних завад містить логічний елемент і направлений відгалужувач, причому у першій схемі заглушення навмисних активних завад перша лінійна розріджена антенна решітка з'єднана з першим комутатором, другий вихід якого з'єднаний зі входом першого атенюатора і першим та другим настроювальними атенюаторами, які з'єднані з першим суматором, який з'єднаний з першим поглинаючим балансним навантаженням, причому вихід першого суматора є входом першого регульованого фазообертача, вихід якого з'єднаний з першим входом першого мостового суматора, причому другий його вхід є виходом першого атенюатора, перший вихід першого мостового суматора з'єднаний з п'ятим входом виконавчого пристрою, а другий його вихід є першим входом другого комутатора, який з'єднаний з другим поглинаючим балансним навантаженням, у другій схемі заглушення навмисних активних завад друга лінійна розріджена антенна решітка з'єднана зі входом другого регульованого атенюатора, який є входом-виходом направленого відгалужувача, і з і=1...nл входами четвертого і і=1...nп п'ятого комутаторів, виходи яких з'єднані відповідно з третім і четвертим настроювальними атенюаторами, які з'єднані з другим суматором, який з'єднаний з другим поглинаючим балансним навантаженням, вихід другого суматора є входом другого регульованого фазообертача, вихід якого з'єднаний зі входом другого мостового суматора, який з'єднаний по входу-виходу з радіомодемом і третім комутатором, причому вихід другого мостового суматора є входом виконавчого пристрою, третій комутатор з'єднаний по входу-виходу з радіомодемом і направленим відгалужувачем, перший вихід якого з'єднаний з другим входом логічного елемента, а другий з'єднаний з першим поглинаючим балансним навантаженням, перший вихід логічного елемента з'єднаний зі входами четвертого і п'ятого комутаторів, а другий його вихід з'єднаний зі входом третього комутатора, яка відрізняється тим, що в кожну схему заглушення навмисних активних завад додатково введені по чотири подільники потужності, по два фазометри і по одному дискретному фазообертачу, при цьому у першій схемі заглушення навмисних активних завад, яка захищає GPS-датчик, входи перших двох подільників потужності з'єднані з виходами перших двох настроювальних атенюаторів, перші виходи перших двох подільників потужності з'єднані з першими входами фазометрів, а другі їх виходи з'єднані зі входами суматора, вхід третього подільника потужності з'єднаний з виходом першого комутатора, перший вихід третього подільника потужності з'єднаний зі входом четвертого подільника потужності, другий його вихід з'єднаний зі входом першого регульованого атенюатора, а перший і другий виходи четвертого подільника потужності з'єднані з другими входами фазометрів, у схемі заглушення навмисних активних завад, яка захищає багатоканальні лінії зв'язку, входи перших двох подільників потужності з'єднані з виходами настроювальних атенюаторів, перші їх виходи з'єднані з першими входами фазометрів, а другі їх виходи з'єднані зі входами суматора, вхід третього подільника потужності з'єднаний з центральним виходом лінійної розрідженої антенної решітки, перший вихід третього подільника потужності з'єднаний зі входом четвертого подільника потужності, а другий його вихід з'єднаний зі входом другого регульованого атенюатора, виходи четвертого подільника потужності з'єднані з другими входами фазометрів, виходи фазометрів у обох схемах заглушення навмисних активних завад з'єднані з відповідними входами виконавчого пристрою, входи дискретних фазообертачів з'єднані з виходами відповідних суматорів, а їх виходи є входами регульованих фазообертачів, керовані входи дискретного і регульованого фазообертачів в обох схемах з'єднані з відповідними виходами виконавчого пристрою.
Текст
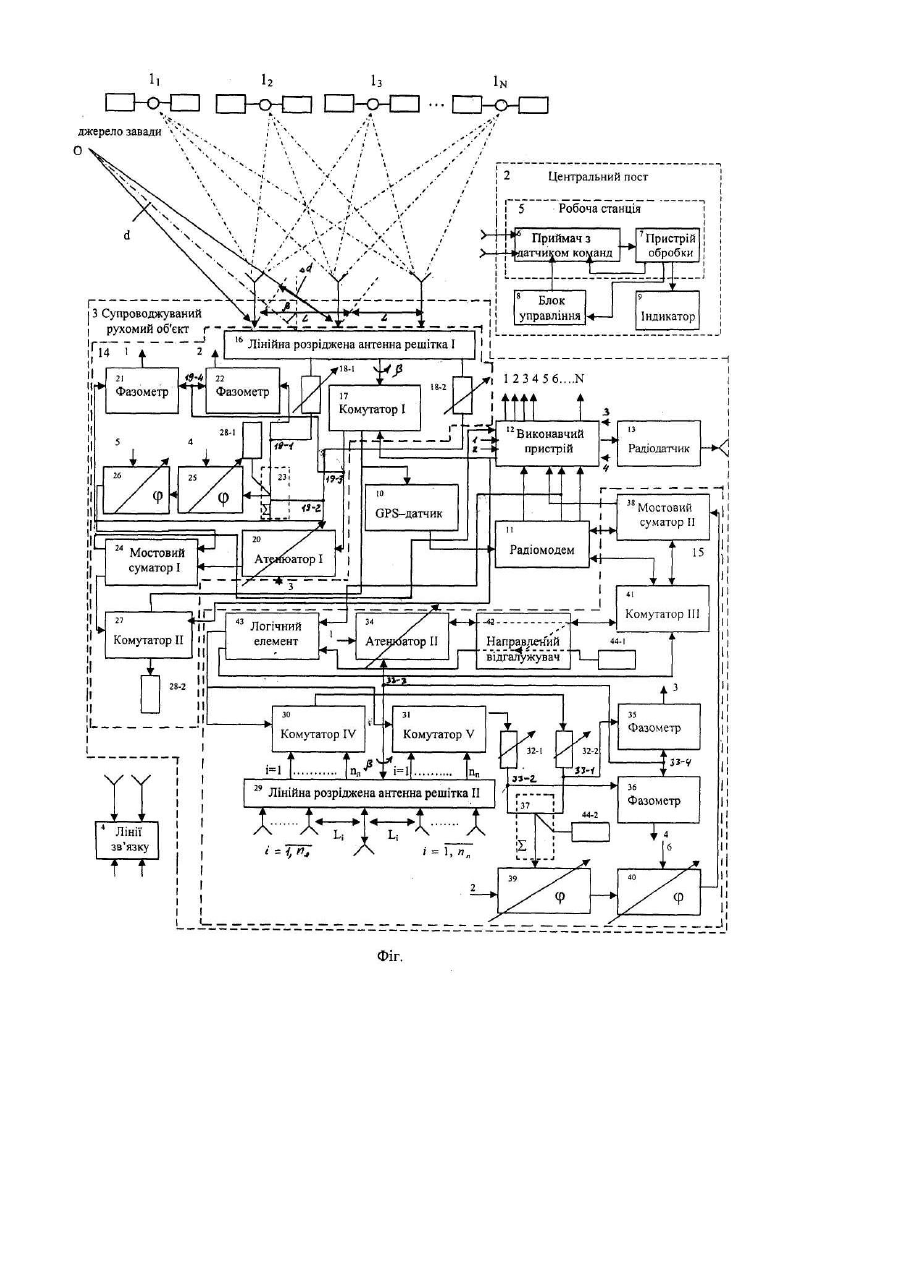
Корисна модель відноситься до радіоелектроніки, а саме до систем диспетчеризації рухомих об'єктів, які використовують глобальну супутникову систему радіонавігації, і може бути застосований для контролю переміщення і супроводження інкасаторських і патрульних машин, машин екстреної допомоги та інших рухомих об'єктів спеціального призначення, для дистанційного виявлення несанкціонованого відкриття (викрадення) службових і приватних транспортних засобів в умовах застосування навмисних активних завад каналам зв'язку і визначення координат рухомих об'єктів. Відома система для визначення місцезнаходження рухомих об'єктів, а саме, транспортних засобів, що використовує глобальну навігаційну систему 1, 2, 3, 4 GPS- супутників на полярних орбітах, сигнали яких з допомогою встановленого на рухомому об'єкті GPS- приймача дозволяють визначити їх миттєве місцезнаходження і координати [див. заявка РСТ № 93/09446, кл. G01S 5/14, 5/00, 1993]. Для підвищення точності визначення координат рухомого об'єкта у відомій системі введено щонайменше ще один опорний GPS- приймач, координати місцезнаходження якого точно відомі. Недоліком відомої системи є те, що вартість апаратури формування диференційних поправок на основі даних опорного приймача на декілька порядків вища за вартість самого GPS-приймача. Відома система супроводження рухомих об'єктів, що використовує сигнали штучни х суп утників Землі (ШСЗ) глобальної супутникової системи радіонавігації, яка на відміну від попередньої системи дозволяє визначати місцезнаходження декількох рухомих об'єктів завдяки періодичному стробуванню сигналів GPS- приймачів у заданому часовому вікні і наявності пристрою обробки, який знаходиться в центральному пункті, причому швидкість передачі даних на пристрій обробки по каналу передачі нижча, ніж швидкість стробування сигналів GPS- приймача [див. заявка ЕПВ № 0545636, кл. G01S 5/00, 5/14, 1994]. Недоліком відомої системи є невисока точність визначення місцезнаходження супроводжуваних рухомих об'єктів із-за використання опорного GPSприймача і неможливість роботи в умовах навмисних активних завад. Найбільш близькою по технічній сутності до заявляємої системи є система супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації [див. Деклараційний патент на винахід № 63867, кл. G01S 5/14, 2004]. Відома система супроводження рухомих об'єктів, вибрана в якості прототипу, містить центральний пост у складі робочої станції з двома приймально-передавльними антенами, яка складається з каскадно з'єднаних приймача з датчиком команд і пристрою обробки, перший вихід котрого з'єднаний з першим входом приймача з датчиком команд, блока управління, вхід котрого з'єднаний з другим виходом пристрою обробки, а вихід - з другим входом приймача з датчиком команд, і індикатора, вхід котрого з'єднаний з третім виходом пристрою обробки, причому вихід приймача з датчиком команд є входом пристрою обробки; супроводжуваний рухомий об'єкт з GPS- датчиком, що приймає й обробляє сигнали ШСЗ глобальної супутникової системи радіонавігації, які попадають у ширококутову діаграму направленості його антени, радіомодемом, вхід якого зв'язаний з виходом GPS- датчика; виконавчим пристроєм; радіодатчиком з антеною, вхід якого з'єднаний з виходом виконавчого пристрою; дві схеми заглушення навмисних активних завад; лінії зв'язку, на які надходять сигнали з виходу радіомодема. Недоліком відомої системи є порівняно низька швидкодія схем заглушення навмисних активних завад, особливо по джерелам завадних випромінювань, які знаходяться у дальній зоні. Технічною задачею, на вирішення якої спрямована корисна модель, є підвищення швидкодії схем заглушення навмисних активних завад шляхом знаходження нульового наближення оптимізаційної задачі знаходження екстремуму, на котрій основана робота схеми завадозахисту від активних завад. Поставлена задача вирішується тим, що у систему для супроводження рухомих об'єктів з використанням глобальної супутникової системи радіонавігації, яка містить центральний пост у складі робочої станції з двома приймально-передавльними антенами, яка складається з каскадно з'єднаних приймача з датчиком команд і пристрою обробки, перший вихід котрого з'єднаний з першим входом приймача з датчиком команд, блока управління, вхід котрого з'єднаний з другим виходом пристрою обробки, а вихід - з другим входом приймача з датчиком команд, і індикатора, вхід котрого з'єднаний з третім виходом пристрою обробки, причому ви хід приймача з датчиком команд з'єднаний зі входом пристрою обробки; лінії зв'язку, на які надходять сигнали з виходу радіомодема; супроводжуваний рухомий об'єкт у складі виконавчого пристрою з 1...N виходами, інший вихід якого з'єднаний з відповідними входами першого і другого комутаторів, GPS- датчика, що приймає й обробляє сигнали ШСЗ глобальної супутникової системи радіонавігації, які попадають у ширококутову діаграму направленості його антени, вхід якого з'єднаний з відповідними виходами першого і другого комутаторів, радіомодема, перший вихід якого з'єднаний зі входом виконавчого пристрою, а другий - зі входом логічного елемента і входом виконавчого пристрою, причому вхід радіомодема є виходом GPS- датчика, радіодатчика, вхід котрого є виходом виконавчого пристрою і який випромінює радіосигнал, а в позаштатній ситуації і індивідуальний код об'єкта; і дві схеми заглушення навмисних активних завад, кожна з яких має лінійну розріджену антенну решітку, два настроювальних атенюатори, два поглинаючих балансних навантаження, суматор, мостовий суматор, регульований атенюатор, фазообертач, перша схема два, а друга три комутатори. Крім того, друга схема заглушення навмисних активних завад містить логічний елемент і направлений відгалужувач. При цьому у першій схемі заглушення навмисних активних завад перша лінійна розріджена антенна решітка з'єднана з першим комутатором, вихід якого з'єднаний зі входом першого атенюатора, і першим та другим настроювальними атенюаторами, які з'єднані з першим суматором, який з'єднаний з першим поглинаючим балансним навантаженням; вихід першого суматора є входом першого регульованого фазообертача, вихід якого з'єднаний з першим входом першого мостового суматора, причому другий його вхід є ви ходом першого атенюатора; перший вихід першого мостового суматора з'єднаний зі входом виконавчого пристрою, а другий його вихід є входом другого комутатора, який з'єднаний з другим поглинаючим балансним навантаженням. У другій схемі заглушення навмисних активних завад друга лінійна розріджена антенна решітка з'єднана зі входом другого регульованого атенюатора, який є входом-виходом направленого відгалужувача, і з і = 1...nл входами четвертого і і = 1...nп п'ятого комутаторів, ви ходи яких з'єднані відповідно з першим і другим настроювальними атенюаторами, які з'єднані з другим суматором, який з'єднаний з другим поглинаючим балансним навантаженням; вихід другого суматора є входом другого регульованого фазообертача, вихід якого з'єднаний зі входом другого мостового суматора, який з'єднаний по входу-ви ходу з радіомодемом і третім комутатором, причому вихід др угого мостового суматора є входом виконавчого пристрою; третій комутатор з'єднаний по входу - ви ходу з направленим відгалужувачем, перший вихід якого з'єднаний зі входом логічного елемента, а другий - з першим поглинаючим балансним навантаженням; перший вихід логічного елемента з'єднаний зі входами четвертого і п'ятого комутаторів, а другий його вихід - зі входом третього комутатора, в кожну схему заглушення навмисних активних завад введені по чотири подільники потужності, по два фазометри і по одному дискретному фазообертачу. При цьому у першій схемі заглушення навмисних активних завад, яка захищає GPS- да тчик, входи перших дво х подільників потужності з'єднані з виходами перших дво х настроювальних атенюаторів, перші виходи перших дво х подільників потужності - з першими входами фазометрів, а другі їх виходи - зі входами суматора. Вхід третього подільника потужності з'єднаний з виходом першого комутатора, перший вихід третього подільника потужності з'єднаний зі входом четвертого подільника потужності, другий його вихід - зі входом першого регульованого атенюатора, а перший і другий виходи четвертого подільника потужності з'єднані з другими входами фазометрів. У схемі заглушення навмисних активних завад, яка захищає багатоканальні лінії зв'язку, входи перших дво х подільників потужності з'єднані з виходами настроювальних атенюаторів, перші їх виходи - з першими входами фазометрів, а другі їх ви ходи - зі входами суматора. Вхід третього подільника потужності з'єднаний з центральним виходом лінійної розрідженої антенної решітки, перший вихід третього подільника потужності з'єднаний зі входом четвертого подільника потужності, а другий його вихід - зі входом другого регульованого атенюатора, виходи четвертого подільника потужності з'єднані з другими входами фазометрів. Виходи фазометрів у обох схемах заглушення навмисних активних завад з'єднані з відповідними входами виконавчого пристрою. Входи дискретних фазообертачів з'єднані з виходами відповідних суматорів, а їх ви ходи є входами регульованих фазообертачів. Керовані входи дискретного і регульованого фазообертачів в обох схемах з'єднані з відповідними виходами виконавчого пристрою. На фіг. приведена структурна схема системи для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації. Підвищення швидкодії схем заглушення навмисних активних завад в супроводжуваному рухомому об'єкті у запропонованій системі забезпечується шляхом визначення дальності до джерела завадового радіовипромінювання по сферичності фронту електромагнітної хвилі (ЕМХ) на цю дальність дискретних фазообертачів, що суттєво зменшує час знаходження глобального екстремуму в схемах заглушення навмисних активних завад. Система містить (фіг.) декілька ШСЗ 11; 12; ...1N (не менш чотирьох) глобальної супутникової системи радіонавігації; центральний пост 2, супроводжуваний рухомий об'єкт 3 і лінії зв'язку 4. Центральний пост 2 складається з робочої станції 5, що містить приймач з датчиком команд 6 і пристрій обробки 7, блока управління 8 і індикатора 9. Супроводжуваний рухомий об'єкт 3 містить: GPS-датчик 10, радіомодем 11, виконавчий пристрій 12 з 1 ...N виходами, радіодатчик 13, який випромінює радіосигнал, а в позаштатній ситуації і індивідуальний код об'єкта і дві схеми заглушення навмисних активних завад 14 і 15. Схема заглушення навмисних активних завад каналу прийому і обробки сигналів з ШСЗ 14 складається з лінійної розрідженої антенної решітки 16, комутатора 17, двох настроювальних атенюаторів 18-1, 18-2, чотирьох подільників потужності 19-1, 19-2, 19-3, 19-4, регульованого атенюатора 20, двох фазометрів 21, 22, суматора 23, мостового суматора 24, дискретного фазообертача 25, регульованого фазообертача 26, комутатора 27 і двох поглинаючих баластних навантажень 28-1 і 28-2. Схема заглушення навмисних активних завад багатоканальних ліній зв'язку 15 складається з лінійної розрідженої антенної решітки 29, двох комутаторів 30, 31 з "i = 1...n" входами, двох настроювальних атенюаторів 32-1, 32-2, чотирьох подільників потужності 33-1, 33-2, 33-3, 33-4, регульованого атенюатора 34, двох фазометрів 35, 36, суматора 37, мостового суматора 38, дискретного фазообертача 39, регульованого фазообертача 40, комутатора 41, направленого відгалужувача 42, логічного елемента 43 і двох поглинаючих баластних навантажень 44-1 і 44-2, причому у робочій станції 5 центрального поста 2 перший вихід пристрою обробки 7 з'єднаний з першим входом приймача з датчиком команд 6, вхід блока управління 8 з'єднаний з другим виходом пристрою обробки 7, а вихід - з другим входом приймача з датчиком команд б, вхід індикатора 9 з'єднаний з третім виходом пристрою обробки 7, причому вихід приймача з датчиком команд 6 з'єднаний зі входом пристрою обробки 7; на лінії зв'язку 4 надходять сигнали з виходу радіомодема 11; у супроводжуваному рухомому об'єкті 3 вихід виконавчого пристрою з 1...N виходами 12 з'єднаний з відповідними входами першого 17 і другого 27 комутаторів; вхід GPS-да тчика 10, що приймає й обробляє сигнали ШСЗ глобальної супутникової системи радіонавігації, які попадають у ширококутову діаграму направленості його антени, з'єднаний з відповідними виходами першого 17 і другого 27 комутаторів; перший вихід радіомодема 11 з'єднаний зі входом виконавчого пристрою 12, а другий вихід - з першим входом логічного елемента 43 і входом виконавчого пристрою 12, причому вхід радіомодема 11 є виходом GPS- датчика 10; вхід радіодатчика 13, який випромінює радіосигнал, а в позаштатній ситуації і індивідуальний код об'єкта, є виходом виконавчого пристрою 12. При цьому у першій схемі заглушення навмисних активних завад 14 перша лінійна розріджена антенна решітка 16 з'єднана з першим комутатором 17, вихід якого з'єднаний зі входом першого атенюатора 20, і першим 18-1 та другим 18-2 настроювальними атенюаторами, які з'єднані через подільники потужності 19-1 і 19-2 з суматором 23, який з'єднаний з поглинаючим балансним навантаженням 28-1; перші входи фазометрів 21 і 22 з'єднані через подільники потужності 19-1 і 19-2 з виходами відповідних настроювальних атенюаторів 18-1 і 18-2, другі їх входи через подільники потужності 19-4 і 19-3 з'єднані з другим виходом першого комутатора 17 і зі входом першого атенюатора 20, а виходи 1,2-з відповідними входами 1,2 виконавчого пристрою 12; вхід дискретного фазообертача 25 з'єднаний з виходом суматора 23, а його вихід є входом регульованого фазообертача 26, вихід якого з'єднаний з першим входом першого мостового суматора 24, причому другий його вхід є ви ходом першого атенюатора 20; перший вихід першого мостового суматора 24 з'єднаний зі входом виконавчого пристрою 12, а другий його вихід є першим входом другого комутатора 27, який з'єднаний з поглинаючим балансним навантаженням 28-2. У другій схемі заглушення навмисних активних завад 15 друга лінійна розріджена антенна решітка 29 через подільник потужності 33-3 з'єднана по входу-виходу з другим регульованим атенюатором 34, який є входом-виходом направленого відгалужувача 42, і з і = 1...nл входами четвертого 30 і і = 1...nп п'ятого 31 комутаторів, ви ходи яких з'єднані відповідно з 32-2 і 32-1 настроювальними атенюаторами, які через подільники потужності 33-2 і 33-1 з'єднані з суматором 37, який з'єднаний з другим поглинаючим балансним навантаженням 44-2; перші входи фазометрів 35 і 36 через подільники потужності 33-1 і 33-2 з'єднані з виходами відповідних настроювальних атенюаторів 32-1 і 32-2, другі їх входи - через подільники потужності 33-4 і 33-3 з'єднані з центральним виходом другої лінійної розрідженої антенної решітки 29, а виходи 3,4 - з відповідними входами 3,4 виконавчого пристрою; вхід дискретного фазообертача 39 з'єднаний з виходом суматора 37, а його вихід є входом регульованого фазообертача 40, вихід якого з'єднаний зі входом другого мостового суматора 38, який з'єднаний по входу-ви ходу з радіомодемом 11 і третім комутатором 41, причому вихід другого мостового суматора 38 є входом виконавчого пристрою 12; третій комутатор 41 з'єднаний по входу-ви ходу з радіомодемом 11 і направленим відгалужувачем 42, перший вихід якого з'єднаний з другим входом логічного елемента 43, а другий - з поглинаючим балансним навантаженням 44-1; перший вихід логічного елемента 43 з'єднаний зі входами четвертого 30 і п'ятого 31 комутаторів, а другий його вихід - зі входом третього комутатора 41. Керовані входи 1,2,3,4,5,6 дискретних 25, 39 і регульованих 26, 40 фазообертачів, атенюаторів 20, 34 в обох схемах з'єднані з відповідними виходами 1,2,3,4,5,6 виконавчого пристрою 12. Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, наприклад, "Navstar" працює таким чином. Система визначає місцезнаходження супроводжуваного рухомого об'єкта 3, використовуючи сигнали ШСЗ її...... IN (не менш чотирьох), реалізуючи в режимі роботи без навмисних завад підходи, які достатньо широко висвітлені в науково-технічній літературі [див. Сетевые спутниковые радионавигационные системы / Под ред. B.C. Шебтаевича, 2 изд. - М.: Радио и связь, 1993,- 408 с.; Б. Гофман-Веленгоф, Д. Коллинз. Глобальна система визначення місцезнаходження (GPS) /Теорія та практика/ Переклад з англ. під. ред. Я.Ц. Яцкіна. - Наукова думка, 1996.- 387 с.; Соловьёв Ю.А. Системы спутниковой навигации - М.: Эко-Тренд, 2000 - 267 с.]. Оскільки принцип дії системи в режимі без завад і з завадами достатньо докладно викладений в системіпрототипі, розглянемо особливості роботи схем заглушення навмисних активних завад 14 і 15 в запропонованій системі під кутом підвищення їх швидкодії. Як показано у відомій системі-прототипі, в режимі без завад по обом каналам сигнали з центральних елементів лінійних розріджених антенних решіток 16 і 29 проходять через комутатори 17 і 41 відповідно на GPS- датчик 10 і радіомодем 11 і далі через багатоканальні лінії зв'язку 4 на центральний пост 2, де обробляються і координати супроводжуваного рухомого об'єкта 3 в реальному масштабі часу появляються на індикаторі 9. При наявності навмисних активних завад автоматично починають працювати схеми заглушення навмисних активних завад 14 і 15, принцип дії котрих грунтується на оптимальному налаштуванні на визначену крутизну фронту ЕМХ завадового сигналу і подальшого його виключення із обробки. Вузьким місцем цих схем є характеристики фазообертачів, котрі повинні змінювати фазу завадових сигналів в широких межах, значення котрих, в свою чергу, визначається дальністю до джерела завади. Відомо (див. Хижа Г.С., Вендик И.Б., Серебрякова Е.А. СВЧ фазовращатели и переключатели - М.: Радио и связь, 1984 - 184 с.), що електронне керовані фазообертачі прохідного типу мають невеликий діапазон перестроювання, а електромеханічні, маючи діапазон перестроювання від 0° до 360°, мають малу швидкодію і велику інертність при зміні напрямку перестроювання. Мінімальною інерційністю володіють дискретні фазообертачі на мостових схемах з р-і-n діодами, принцип дії котрих заснований на відбитку від короткозамикачів або перерізів установки р-і-n діодів при знаходженні останніх в режимі шунтування. Отже, з точки зору підвищення швидкодії доцільно швидко і грубо (нульове наближення) виставити визначене положення дискретного фазообертача, однозначно зв'язаного з дальністю до джерела завади, а потім з допомогою швидкодіючого електричне керованого фазообертача підрегулювати схему подавлення на оптимум. Ця задача в запропонованій системі вирішується з допомогою фазообертачів 25, 26 в GPS- каналі і 39,40 в каналі передачі координат на центральний пост 2. Для визначення дальності до джерела завад (положення дискретного фазообертача) можна використовувати основний результат роботи (див. Деклараційний патент на винахід № 57534А, кл. G01S 5/14 - К.: Промислова власність, №6, 2003), а саме: визначення дальності по сферичності фронту ЕМХ за допомогою співвідношення: d= 2p(L cos b) 2 ´ f 2p(L cos b)2 = c ´ DD j l ´ DD f (1) де L (Lі) - відстань (база) між крайнім і центральним елементами лінійних розріджених антенних решіток; b - азимут на джерело завади, котрий визначається від нормалі до бази L до максимуму сигналів в елементах лінійних розріджених антенних решіток; f - часто та сигналу, котра відома як для каналу визначення координат, так і для каналу зв'язку; с - швидкість світла; l - довжина хвилі; DDj = D j1 - Dj 2 (2) - різниця різниць фаз (новий інформаційний параметр), де Dj1 i Dj 2 - відповідно різниці фаз між першим і другим, другим і третім елементами лінійних розріджених антенних решіток, які визначаються фазометрами 21, 22 і 35, 36. Таким чином, на відміну від відомої системи в запропонованій системі при подавлені завад сигнали з виходів антенних пар через комутатори і настроювальні атенюатори подаються як на схеми заглушення, так і на фазометри 21, 22 і 35, 36. Значення різниць фаз Dj1 i Dj 2 з виходів фазометрів 1, 2 і 3, 4 подаються на виконавчий пристрій 12, де мікропроцесором по формулі (1) визначається дальність до джерела завади і виробляється команда на положення дискретного фазообертача 25 (39), яка поступає на нього через вхід 4 (2). При цьому значення b (фіг.), визначається по одній із різниць фаз Dj1 або D j 2 , оскільки, як показано в (див. Радиотехнические системы / Под редакцией Ю.М. Казаринова - М.: Высшая школа, 1990 - 496 стр.), при вимірюванні кутових координат фазовим методом різниця фаз коливань, які приймаються на дві рознесені антени, однозначно зв'язана з пеленгом на джерело сигналу наступним співвідношенням: Dj = 2 p L ´ sin b l (3) Далі схеми заглушення завад працюють як у системі-прототипі, а саме, мікропроцесором виконавчого пристрою 12 вирішується оптимізаційна задача і через керуючі входи 5, 6 регульованих фазообертачів здійснюється їх регулювання з метою отримання максимуму сигналу у першому ви хідному плечі мостових суматорів 24, 38 і мінімального в другому. При цьому сигнали завади далі не проходять, а корисні сигнали із-за неоптимального для них налаштування фазообертачів проходять з других виходів мостових суматорів на подальшу обробку в каналі GPS- прийому або в лінії зв'язку для передачі даних на центральний пост. Принципова відмінність запропонованої системи від відомих полягає у тому, що її використання дозволяє підвищити швидкодію схем заглушення при застосуванні навмисних активних завад. Розглянемо варіанти схемної реалізації основних елементів запропонованої схеми. У якості ліній зв'язку 4 можна використовувати мобільний зв'язок стандарту NMT, GSM, транкінговий зв'язок з контролером на мікропроцесорі "Intel". Радіомодем 11 підбирається під стандарт зв'язку. GPS - датчик 10 можна використовува ти типу Lassen SK8, АСЕ 2, АСЕ 3. Блок управління 8 - це персональний комп'ютер (типу Pentium 4). У якості пристрою обробки 7 використовується персональний комп'ютер зі спеціальним програмним забезпеченням. Індикатором 9 є монітор персонального комп'ютера. Виконавчий пристрій 12 - реле, електромагніти, описано в (див. Патент № 2027195 (Россия). Спутниковая система для определения местоположения судов и самолетов, потерпевших аварию., М. кл. 00155/1//Дикарев В.И. и др.). Радіодатчик 13 - це генератор на діоді Гана. Лінійні розріджені антенні решітки 16, 29 потрібно проектувати під вибраний діапазон частот. У якості фазометрів 21, 22, 35, 36 можуть бути застосовані будь-які фазометри використовуваного діапазону хвиль радіодатчика 13, у тому числі і фазометри авторів (див. АС № 206038 (СССР). Фазометр, М. кл. G01R25/00 //Федоров В.И., Якорнов Е.А. и др.; Положительное решение по заявке № 4950140/21 от 29.04.91. Фазометр, М. кл. G01R25/00 //Карпенко Б.А., Якорнов Е.А. и др.). Дискретні 25, 39 і регульовані 26, 40 фазообертачі добре описані в науково-технічній літературі (див. Царенко В.Т., Имшепецкий В.В., Борисов М.М. Автоматические устройства СВЧ - К.: Техника, 1983 - рис. 19б,в; Микроэлектронные устройства СВЧ / Под ред. Н.Т. Бова, Ю.Г. Ефремов, В.В. Копии и др. К.: Техника, 1984 - рис. 7.2). Мостові суматори 24, 38 розглянуті (див. Микроэлектронные устройства СВЧ / Под ред. Н.Т. Бова, Ю.Г. Ефремов, В.В. Копии и др. К.: Те хника, 1984, мост Ланге, рис. 1.1, 4.25). Комутатори 17, 27, 41, 30, 31 розглянуті (див. Вайсблат А.В. Коммутационные устройства СВЧ на полупроводниковых диодах. - М.: Радио и связь, 1987. - 120 с.). Атенюатори 20, 34 розглянуті (див. Микроэлектронные устройства СВЧ / Под ред. Н.Т. Бова, Ю.Г. Ефремов, В.В. Копин и др. К.: Техника, 1984 - глава 6). Направлений відгалужувач 42 розглянутий (див. Пименов Ю.В., Вольгот В.И., Муравцов А.Д. Техническая электродинамика. - М.: Радио и связь, 2000. - с.536). Подільники потужності 19-1 - 19-4, 33-1 - 33-4 розглянуті (див. Микроэлектронные устройства СВЧ / Под ред. Н.Т. Бова, Ю.Г. Ефремов, В.В. Копии и др. К.: Те хника, 1984 - глава 2). Рішення оптимізаційної задачі (настройка регульованих атенюаторов і фазообертачів на максимальні рівні завад) і її технічна реалізація досить добре описані в науково-технічній літературі (див., наприклад, Ундроу Б., Стирнд С. Адаптивная обработка сигналов: Пер. с англ.- М.: Радио и связь, 1989.- 440 с.).
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for tracking mobile objects by using signals of the global navigation satellite system
Автори англійськоюAvdeenko Hlib Leonidovych, Yakornov Yevhenii Arkadiiovych
Назва патенту російськоюСистема сопровождения подвижных объектов с использованием сигналов глобальной навигационной спутниковой системы
Автори російськоюАвдеенко Глеб Леонидович, Якорнов Евгений Аркадиевич
МПК / Мітки
МПК: G01S 5/14
Мітки: супутникової, використанням, системі, радіонавігації, глобальної, система, сигналів, супроводження, рухомих, об'єктів
Код посилання
<a href="https://ua.patents.su/5-8150-sistema-dlya-suprovodzhennya-rukhomikh-obehktiv-z-vikoristannyam-signaliv-globalno-suputnikovo-sistemi-radionavigaci.html" target="_blank" rel="follow" title="База патентів України">Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації</a>
Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 63867
Опубліковано: 15.01.2004
Автори: Якорнов Євгеній Аркадійович, Рогов Петро Дмитрович, Копитко Ігор Йосипович, Левшенко Олександр Семенович, Ільченко Михайло Юхимович
МПК: G01S 5/14
Мітки: супроводження, використанням, система, системі, радіонавігації, сигналів, глобальної, об'єктів, рухомих, супутникової
Формула / Реферат:
1. Система для супроводження рухомих об'єктів з використанням глобальної супутникової системи радіонавігації, що містить супроводжуваний рухомий об'єкт з GPS-датчиком, що приймає й обробляє сигнали штучних супутників Землі глобальної супутникової системи радіонавігації, які попадають у ширококутову діаграму направленості його антени, радіомодемом, вхід якого зв'язаний з виходом GPS-датчика, лінії зв'язку, на які надходять сигнали з виходу...
Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 57534
Опубліковано: 16.06.2003
Автори: Вдовіченко Наталія Євгенівна, Саричев Юрій Олексійович, Копитко Ігор Йосипович, Федоров Володимир Іванович, Якорнов Євгеній Аркадійович, Рогов Петро Дмитрович
МПК: G01S 5/14
Мітки: супутникової, сигналів, супроводження, об'єктів, радіонавігації, рухомих, система, глобальної, системі, використанням
Формула / Реферат:
1. Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, що містить перший супроводжуваний рухомий об'єкт з радіомодемом, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, і датчиком, вихід якого є першим входом радіомодема, а на вхід датчика надходять сигнали від штучних супутників землі глобальної супутникової системи, центральний пункт у складі...
Система керування
Номер патенту: 66917
Опубліковано: 15.06.2004
Автори: Чигирин Юрій Трохимович, Маранов Олександр Вікторович, Чигирин Олег Трохимович
МПК: G06F 11/16, G06F 11/00
Формула / Реферат:
Система керування, що складається з багаторозрядного цифрового лічильного каналу, дешифратора, схеми керування, яка включає формувач і два елементи затримки, і генератора, вихід якого з'єднано з першими входами першого багаторозрядного цифрового лічильного каналу, схеми керування і дешифратора, вихід якого з'єднано з виходом системи керування, вхід схеми керування через перший елемент затримки, перший формувач і другий елемент затримки...
Пристрій для стиснення фазоманіпульованих сигналів
Номер патенту: 38496
Опубліковано: 15.12.2004
Автори: Мирошниченко Михайло Іванович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, Немчин Олександр Федорович, Мокеєв Юрій Генадійович, Крупінов Юрій Олександрович
МПК: G01S 7/36
Мітки: сигналів, фазоманіпульованих, стиснення, пристрій
Формула / Реферат:
1. Пристрій для стиснення фазоманіпульованих сигналів, що містить фільтр, суматори, елементи затримки та помножувачі, який відрізняється тим, що він додатково містить перший блок оперативних запам’ятовуючих пристроїв (ОЗП) та перший блок керування адресою ОЗП, вхід першого блока ОЗП з'єднаний з виходом оптимального фільтра, перший вихід першого блока ОЗП з'єднаний з третім входом тривходового суматора, другий вихід першого блока ОЗП з'єднаний...
Система та спосіб управління потужністю глобальної багатосупутникової системи
Номер патенту: 26214
Опубліковано: 19.07.1999
Автори: Бертіджер Барі Роберт, Петерсон Кеннет Мейнард, Леопольд Реймонд Джозеф
МПК: H04B 7/185
Мітки: управління, потужністю, глобальної, спосіб, системі, система, багатосупутникової
Формула / Реферат:
1, Система, управления мощностью глобальной многоспутниковой системы, в которой входящие в нее спутники образуют созвездие с пересекающимися орбитами, причем каждый спутник содержит множество антенн, проецирующих множество лепестков диаграмм направленности на земную поверхность, причем каждый лепесток имеет первую зону обслуживания на земной поверхности, или "ячейку", причем сумма ячеек для каждого спутника образует вторую зону...