Приладова система для вимірювання геометричних параметрів виробів
Формула / Реферат
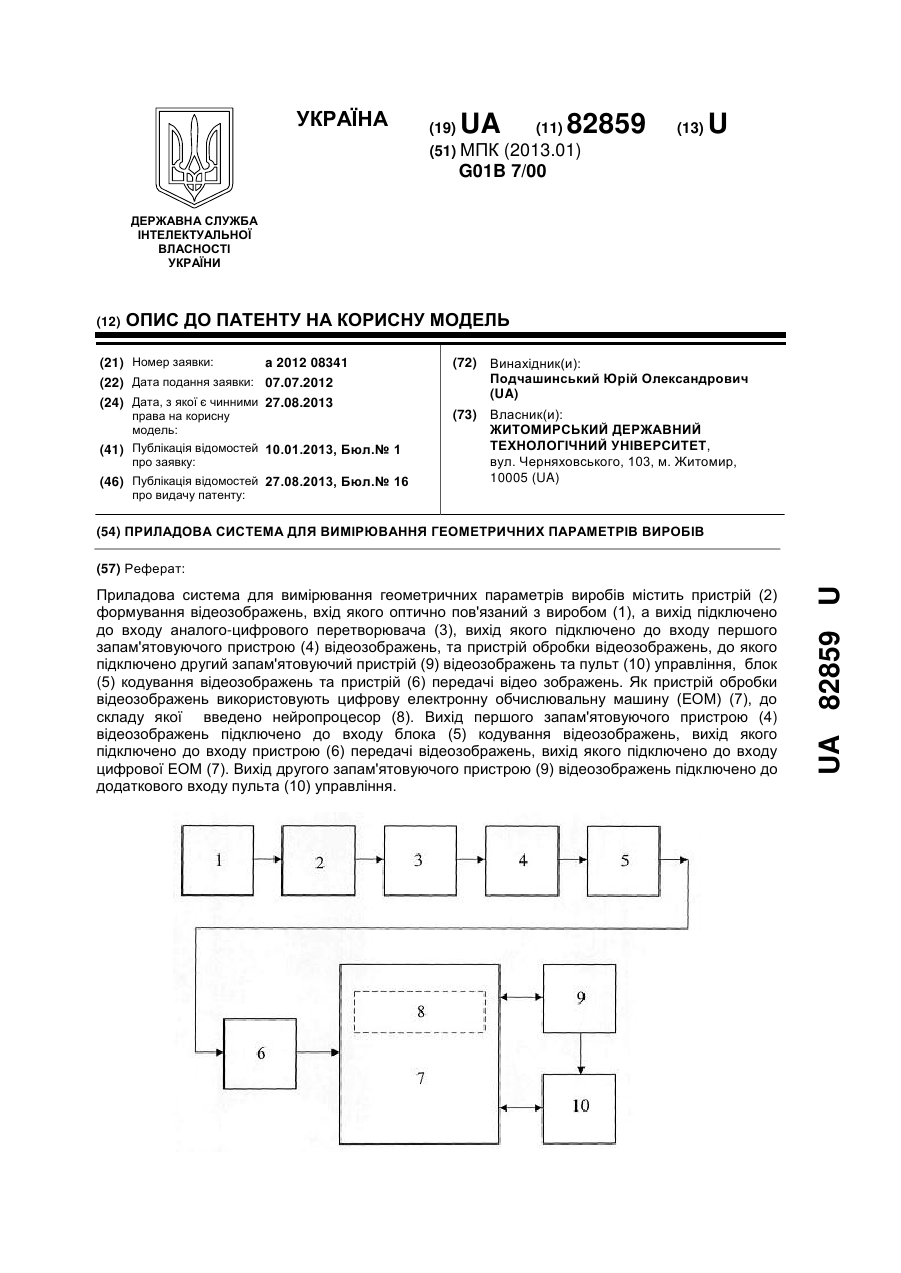
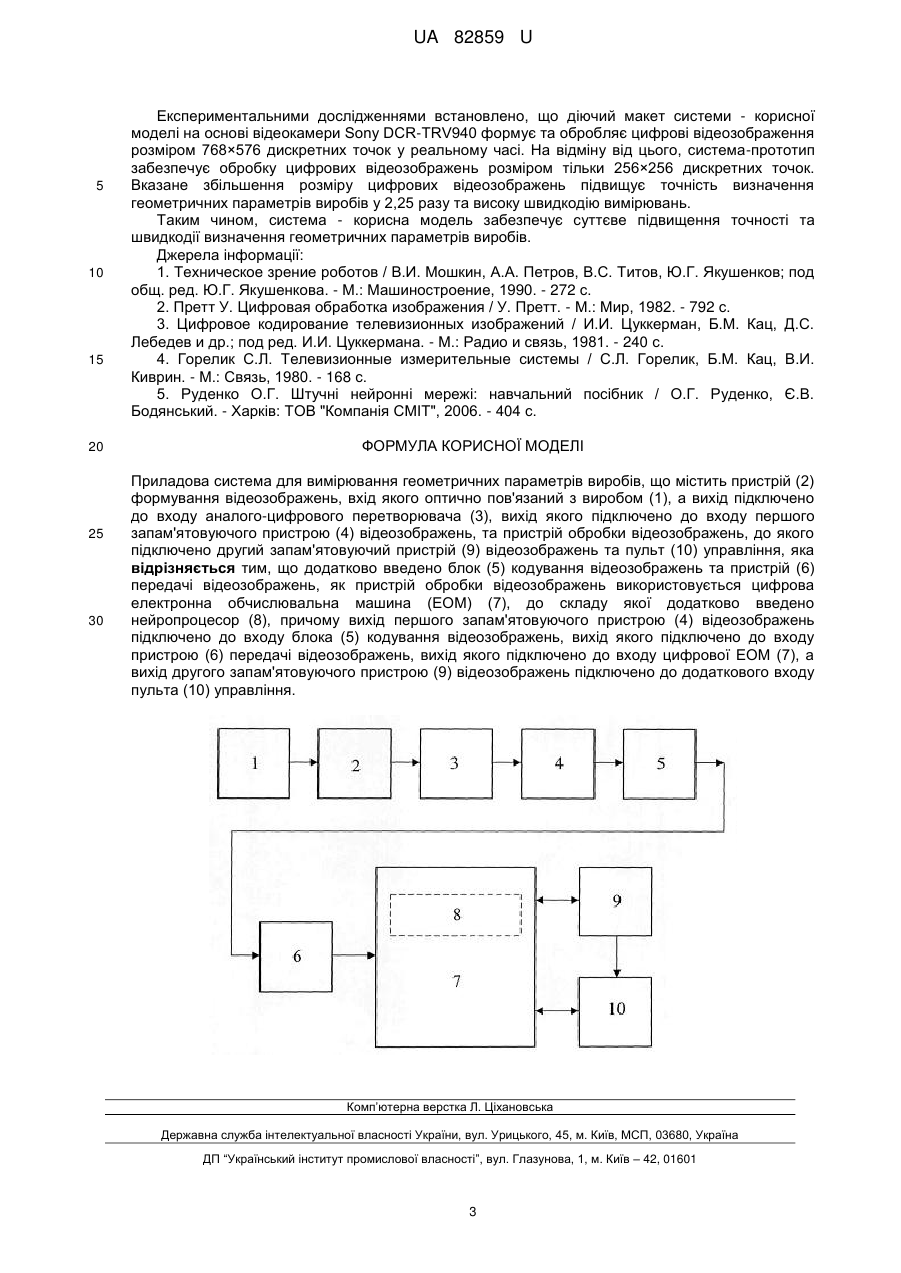
Приладова система для вимірювання геометричних параметрів виробів, що містить пристрій (2) формування відеозображень, вхід якого оптично пов'язаний з виробом (1), а вихід підключено до входу аналого-цифрового перетворювача (3), вихід якого підключено до входу першого запам'ятовуючого пристрою (4) відеозображень, та пристрій обробки відеозображень, до якого підключено другий запам'ятовуючий пристрій (9) відеозображень та пульт (10) управління, яка відрізняється тим, що додатково введено блок (5) кодування відеозображень та пристрій (6) передачі відеозображень, як пристрій обробки відеозображень використовується цифрова електронна обчислювальна машина (ЕОМ) (7), до складу якої додатково введено нейропроцесор (8), причому вихід першого запам'ятовуючого пристрою (4) відеозображень підключено до входу блока (5) кодування відеозображень, вихід якого підключено до входу пристрою (6) передачі відеозображень, вихід якого підключено до входу цифрової ЕОМ (7), а вихід другого запам'ятовуючого пристрою (9) відеозображень підключено до додаткового входу пульта (10) управління.
Текст
Реферат: UA 82859 U UA 82859 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі вимірювальної техніки і може бути використана для визначення геометричних параметрів промислових виробів на підприємствах. Відома приладова система для вимірювання геометричних параметрів виробів [1, C. 230231], що вибрана за прототип. Як і система, що заявляється, система-прототип містить пристрій формування відеозображень, вхід якого оптично пов'язаний з виробом, а вихід підключено до входу аналого-цифрового перетворювача, вихід якого підключено до входу першого запам'ятовуючого пристрою відеозображень, та пристрій обробки відеозображень, до якого підключено другий запам'ятовуючий пристрій відеозображень та пульт управління. Проте, на відміну від системи - корисної моделі, у системі-прототипі вихід першого запам'ятовуючого пристрою відеозображень безпосередньо підключено до входу пристрою обробки відеозображень. Цифрові відеозображення, що отримані за допомогою аналогоцифрового перетворювача та зберігаються в першому запам'ятовуючому пристрої, мають значний об'єм цифрових даних [2]. Безпосередня передача цих відеозображень від першого запам'ятовуючого пристрою відеозображень до пристрою обробки відеозображень займає багато часу і суттєво знижує швидкодію системи-прототипу. Обробку відеозображень та визначення геометричних параметрів виробів в системіпрототипі виконує пристрій обробки відеозображень, що налаштований на попередньо задані значення властивостей виробів та умов вимірювань (яскравість та колір виробів, величина зовнішнього освітлення виробів, статистичні характеристики корисного відеосигналу та шумів у пристрої формування відеозображень). Але в процесі роботи системи-прототипу ці значення можуть змінюватися в певних межах, що обумовлено технологічним процесом виготовлення виробів та впливом випадкових факторів на поточні умови вимірювань. В результаті, виникає додаткова похибка вимірювання геометричних параметрів виробів, що суттєво знижує точність системи-прототипу. Результати обробки відеозображень та вимірювання геометричних параметрів виробів зберігаються в другому запам'ятовуючому пристрої відеозображень системи-прототипу. Передача цих результатів на пульт управління виконується через пристрій обробки відеозображень, який в цей час не може виконувати обробку наступного відеозображення. Це також знижує швидкодію системи-прототипу. Таким чином, система-прототип має низьку точність та швидкодію вимірювання геометричних параметрів виробів. В основу корисної моделі поставлена задача удосконалення приладової системи для вимірювання геометричних параметрів виробів, щоб забезпечити підвищення точності та швидкодії вимірювання цих параметрів. Поставлена задача вирішується тим, що в приладову систему для вимірювання геометричних параметрів виробів, що містить пристрій формування відеозображень, вхід якого оптично пов'язаний з виробом, а вихід підключено до входу аналого-цифрового перетворювача, вихід якого підключено до входу першого запам'ятовуючого пристрою відеозображень, та пристрій обробки відеозображень, до якого підключено другий запам'ятовуючий пристрій відеозображень та пульт управління, згідно з корисною моделлю, додатково введено блок кодування відеозображень та пристрій передачі відеозображень, як пристрій обробки відеозображень використовується цифрова електронна обчислювальна машина (ЕОМ), до складу якої додатково введено нейропроцесор, причому вихід першого запам'ятовуючого пристрою відеозображень підключено до входу блока кодування відеозображень, вихід якого підключено до входу пристрою передачі відеозображень, вихід якого підключено до входу цифрової ЕОМ, а вихід другого запам'ятовуючого пристрою відеозображень підключено до додаткового входу пульта управління. До складу системи - корисної моделі додатково введено блок кодування відеозображень та пристрій передачі відеозображень. Причому вихід першого запам'ятовуючого пристрою відеозображень підключено до входу блока кодування відеозображень, вихід якого підключено до входу пристрою передачі відеозображень, вихід якого підключено до входу цифрової ЕОМ. Блок кодування відеозображень забезпечує перетворення відеозображень в форму, що має зменшений об'єм цифрових даних. Це відбувається за рахунок виключення інформаційної надлишковості відеозображень та виключення цифрових даних, несуттєвих для вимірювання геометричних параметрів виробів. Пристрій передачі відеозображень передає зменшений об'єм цифрових даних відеозображень в цифрову ЕОМ по одному з інтерфейсів передачі цифрових даних. В результаті, підвищується швидкодія системи - корисної моделі. У системі - корисній моделі, як пристрій обробки відеозображень, використовується цифрова ЕОМ, до складу якої додатково введено нейропроцесор. Нейропроцесор містить базові елементи штучних нейронних мереж, які з'єднані в певній послідовності і 1 UA 82859 U 5 10 15 20 25 30 35 40 45 50 55 використовуються для відновлення відеозображень з випадковими і динамічними похибками вимірювальної інформації про геометричні параметри, для пошуку і виділення виробів на відеозображеннях. Завдяки адаптивним властивостям штучної нейронної мережі, параметри алгоритмів обробки відеозображень можуть налаштовуватися відповідно до поточних умов вимірювань та властивостей виробів. В результаті, компенсується додаткова похибка вимірювань геометричних параметрів виробів і суттєво підвищується точність системи корисної моделі. У системі - корисній моделі вихід другого запам'ятовуючого пристрою відеозображень підключено до додаткового входу пульта управління. Таке рішення забезпечує безпосередню передачу на пульт управління результатів обробки поточного відеозображення та результатів вимірювання геометричних параметрів виробів. При цьому цифрова ЕОМ виконує обробку наступного відеозображення. В результаті, підвищується швидкодія системи - корисної моделі. Таким чином, у системі - корисній моделі забезпечується підвищення точності та швидкодії вимірювання геометричних параметрів виробів. Суть корисної моделі пояснюється кресленням, на якому зображено структурну схему приладової системи для вимірювання геометричних параметрів виробів. Система - корисна модель містить пристрій 2 формування відеозображень, аналогоцифровий перетворювач 3, перший запам'ятовуючий пристрій 4 відеозображень, блок 5 кодування відеозображень, пристрій 6 передачі відеозображень, цифрову ЕОМ 7, до складу якої входить нейропроцесор 8, другий запам'ятовуючий пристрій 9 відеозображень та пульт 10 управління. Вхід пристрою 2 формування відеозображень оптично пов'язаний з виробом 1, а вихід підключено до входу аналого-цифрового перетворювача 3, вихід якого підключено до входу першого запам'ятовуючого пристрою 4 відеозображень. Вихід першого запам'ятовуючого пристрою 4 відеозображень підключено до входу блока 5 кодування відеозображень, вихід якого підключено до входу пристрою 6 передачі відеозображень, вихід якого підключено до входу цифрової ЕОМ 7. До цифрової ЕОМ 7 підключено другий запам'ятовуючий пристрій 9 відеозображень та пульт управління. Вихід другого запам'ятовуючого пристрою 9 відеозображень підключено до додаткового входу пульта 10 управління. Приладова система для вимірювання геометричних параметрів виробів працює таким чином. Пристрій 2 формування відеозображень формує відеозображення об'єкта 1 вимірювань, яке надходить на вхід аналого-цифрового перетворювача 3. Аналого-цифровий перетворювач 3 перетворює відеозображення в цифрову форму і воно записується в запам'ятовуючий пристрій 4 відеозображень. Блок 5 кодування відеозображень зчитує відеозображення із запам'ятовуючого пристрою 4 відеозображень та зменшує об'єм цифрових даних цього відеозображення шляхом виключення інформаційної надлишковості відеозображення та виключення цифрових даних, несуттєвих для вимірювання геометричних параметрів виробів [3, 4]. Закодоване таким чином відеозображення надходить з виходу блока 5 кодування відеозображень на вхід пристрою 6 передачі відеозображень. Пристрій 6 передачі відеозображень передає зменшений об'єм цифрових даних відеозображення в цифрову ЕОМ 7 по одному з інтерфейсів передачі цифрових даних. Цифрова ЕОМ 7 за участю нейропроцесора 8 виконує обробку цифрового відеозображення. Ця обробка полягає у відновлення відеозображення з випадковими і динамічними похибками вимірювальної інформації про геометричні параметри, пошуку і виділення виробу на відеозображенні, визначенні геометричних параметрів виробу. Нейропроцесор містить базові елементи штучних нейронних мереж, які з'єднані в певній послідовності і використовуються для обробки відеозображення. Завдяки адаптивним властивостям штучної нейронної мережі [5], параметри алгоритмів обробки відеозображення налаштовуються відповідно до поточних умов вимірювань та властивостей виробу. В результаті, компенсується додаткова похибка вимірювань геометричних параметрів виробу. Відновлене відеозображення та результати визначення геометричних параметрів виробу надходять для зберігання у другий запам'ятовуючий пристрій 9 відеозображень. Пульт 10 управління здійснює управління роботою приладової системи. Пульт 10 управління також забезпечує візуалізацію відновленого відеозображення виробу та результатів вимірювання його геометричних параметрів. При цьому відеозображення виробу та результати вимірювання його геометричних параметрів надходять на пульт 10 управління з другого запам'ятовуючого пристрою 9 відеозображень. Цифрова ЕОМ 7 в цей час може виконувати обробку наступного відеозображення. 2 UA 82859 U 5 10 15 20 25 30 Експериментальними дослідженнями встановлено, що діючий макет системи - корисної моделі на основі відеокамери Sony DCR-TRV940 формує та обробляє цифрові відеозображення розміром 768×576 дискретних точок у реальному часі. На відміну від цього, система-прототип забезпечує обробку цифрових відеозображень розміром тільки 256×256 дискретних точок. Вказане збільшення розміру цифрових відеозображень підвищує точність визначення геометричних параметрів виробів у 2,25 разу та високу швидкодію вимірювань. Таким чином, система - корисна модель забезпечує суттєве підвищення точності та швидкодії визначення геометричних параметрів виробів. Джерела інформації: 1. Техническое зрение роботов / В.И. Мошкин, А.А. Петров, B.C. Титов, Ю.Г. Якушенков; под общ. ред. Ю.Г. Якушенкова. - М.: Машиностроение, 1990. - 272 с. 2. Претт У. Цифровая обработка изображения / У. Претт. - М.: Мир, 1982. - 792 с. 3. Цифровое кодирование телевизионных изображений / И.И. Цуккерман, Б.М. Кац, Д.С. Лебедев и др.; под ред. И.И. Цуккермана. - М.: Радио и связь, 1981. - 240 с. 4. Горелик С.Л. Телевизионные измерительные системы / С.Л. Горелик, Б.М. Кац, В.И. Киврин. - М.: Связь, 1980. - 168 с. 5. Руденко О.Г. Штучні нейронні мережі: навчальний посібник / О.Г. Руденко, Є.В. Бодянський. - Харків: ТОВ "Компанія СМІТ", 2006. - 404 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Приладова система для вимірювання геометричних параметрів виробів, що містить пристрій (2) формування відеозображень, вхід якого оптично пов'язаний з виробом (1), а вихід підключено до входу аналого-цифрового перетворювача (3), вихід якого підключено до входу першого запам'ятовуючого пристрою (4) відеозображень, та пристрій обробки відеозображень, до якого підключено другий запам'ятовуючий пристрій (9) відеозображень та пульт (10) управління, яка відрізняється тим, що додатково введено блок (5) кодування відеозображень та пристрій (6) передачі відеозображень, як пристрій обробки відеозображень використовується цифрова електронна обчислювальна машина (ЕОМ) (7), до складу якої додатково введено нейропроцесор (8), причому вихід першого запам'ятовуючого пристрою (4) відеозображень підключено до входу блока (5) кодування відеозображень, вихід якого підключено до входу пристрою (6) передачі відеозображень, вихід якого підключено до входу цифрової ЕОМ (7), а вихід другого запам'ятовуючого пристрою (9) відеозображень підключено до додаткового входу пульта (10) управління. Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюInstrument system for measurement of geometrical parameters of articles
Автори англійськоюPodchashynskyi Yurii Oleksandrovych
Назва патенту російськоюПриборная система для измерения геометрических параметров изделий
Автори російськоюПодчашинский Юрий Александрович
МПК / Мітки
МПК: G01B 7/00
Мітки: система, геометричних, параметрів, приладова, вимірювання, виробів
Код посилання
<a href="https://ua.patents.su/5-82859-priladova-sistema-dlya-vimiryuvannya-geometrichnikh-parametriv-virobiv.html" target="_blank" rel="follow" title="База патентів України">Приладова система для вимірювання геометричних параметрів виробів</a>
Спосіб вимірювання геометричних параметрів підземних порожнеч
Номер патенту: 85334
Опубліковано: 12.01.2009
Автори: Караманиць Федір Іванович, Попов Станіслав Олегович, Азарян Альберт Арамаісович
МПК: G01C 3/00
Мітки: підземних, вимірювання, геометричних, порожнеч, спосіб, параметрів
Формула / Реферат:
Спосіб вимірювання геометричних параметрів підземних порожнеч, що включає розміщення лазерного сканера через отвір у верхній частині порожнечі, його фіксацію у цій порожнечі, послідовне кутове орієнтування сканера із заданим кроком і спрямування променя лазера у напрямку розташування поверхні, що вимірюється, і визначення відстані від далекоміра до вимірюваної точки на поверхні порожнечі на кожному кроці кутового орієнтування сканера, який...
Пристрій для вимірювання параметрів геометричних модулів тазової ділянки тіла людини
Номер патенту: 76379
Опубліковано: 10.01.2013
Автори: Славінська Алла Людвігівна, Вовк Юлія Володимирівна
МПК: A41H 1/00
Мітки: геометричних, пристрій, людини, параметрів, тіла, ділянки, вимірювання, тазової, модулів
Формула / Реферат:
Пристрій для вимірювання параметрів геометричних модулів тазової ділянки тіла, який являє собою спільну розгортку тазової ділянки тіла для поясних виробів, що містить геометричні модулі передньої та задньої частини, який відрізняється тим, що конструкція тазової ділянки містить геометричні модулі конструктивного прототипу прямої спідниці, при цьому геометричні модулі конструкції тазової ділянки передньої і задньої частини штанів отримують...
Спосіб вимірювання параметрів геометричних фігур в геодезичній високоточній лінійно-кутовій мережі
Номер патенту: 77417
Опубліковано: 15.12.2006
Автори: Бурачек Всеволод Германович, Малік Тетяна Миколаївна
МПК: G01C 1/00
Мітки: параметрів, спосіб, геометричних, вимірювання, високоточний, мережі, фігур, геодезичний, лінійно-кутовій
Формула / Реферат:
1. Спосіб вимірювання параметрів геометричних фігур в геодезичній високоточній лінійно-кутовій мережі, який ґрунтується на вимірюванні кутів у вершинах фігур і вимірюванні довжин сторін, який відрізняється тим, що вимірювання всіх кутів у вершинах кожної фігури виконують з однієї вершини, при цьому лінії візування направляють оптично через вершини інших кутів фігури.2. Спосіб вимірювання параметрів геометричних фігур в геодезичній...
Спосіб визначення геометричних характеристик і параметрів руху наземних об’єктів при геомоніторингу і система для його реалізації
Номер патенту: 91299
Опубліковано: 12.07.2010
Автори: Прудиус Іван Никифорович, Лазько Леонід Вікторович, Мимріков Дмитро Олександрович, Зубков Анатолій Миколайович
МПК: G01S 13/00, G01J 3/28
Мітки: реалізації, геомоніторингу, характеристик, система, наземних, руху, спосіб, параметрів, визначення, геометричних, об'єктів
Формула / Реферат:
1. Спосіб визначення геометричних характеристик і параметрів руху наземних об'єктів при геомоніторингу, за яким аналізують тепловий в інфрачервоному діапазоні довжин хвиль і радіолокаційний в міліметровому діапазоні довжин хвиль взаємоконтрасти об'єкта спостереження та фону шляхом механічного переміщення плоского дзеркала, розміщеного в паралельному пучку променів, сформованому параболічною антеною, роздільно фокусують теплове випромінювання...
Пристрій оперативного контролю геометричних параметрів недоступних підземних порожнин
Номер патенту: 27176
Опубліковано: 25.10.2007
Автори: Попов Станіслав Олегович, Цибулевський Юрій Євгенович, Азарян Альберт Арамаісович, Аксюк Віктор Лаврентійович
МПК: G01C 3/00
Мітки: підземних, контролю, порожнин, параметрів, оперативного, недоступних, пристрій, геометричних
Формула / Реферат:
1. Пристрій оперативного контролю геометричних параметрів недоступних підземних порожнин, який містить камеру автоматичного лазерного сканера, блок наведення, що складається з двох електродвигунів, через редуктор зв'язаних з камерою автоматичного лазерного сканера, які через підсилювачі з'єднані з входом мікропроцесора, який відрізняється тим, що пристрій обладнано кишеньковим персональним комп'ютером з системою бездротового зв'язку з камерою...
Попередній патент: Спосіб увч фізіотерапії
Наступний патент: Шахи
Випадковий патент: Система для безпосередньої подачі абразивного матеріалу в зону контакту колеса з рейкою