Спосіб та пристрій для геодезичної прив’язки аерокосмічних знімків
Номер патенту: 90826
Опубліковано: 25.05.2010
Автори: Зацерковний Віталій Іванович, Крячок Сергій Дмитрович, Бурачек Всеволод Германович, Беленок Вадим Юрійович, Крельштейн Петро Давидович

Формула / Реферат
1. Спосіб геодезичної прив'язки аерокосмічних знімків, заснований на субпіксельній технології, який відрізняється тим, що виконують оптико-електронну цифрову зйомку поверхні об'єкта з багатосекторними опорними геодезичними знаками, після чого для кожного зображення знаків вибирають дві пари діаметрально протилежних секторних фігур, медіани яких утворюють якнайменші кути відхилення з лініями стовпців і рядків мішені матричного фотоприймача, та обчислюють координати центрів зображень опорних знаків на мішені матричного фотоприймача як середні значення координат центрів медіан вибраних пар секторних фігур по лініях стовпців та рядків.
2. Пристрій для геодезичної прив'язки аерокосмічних знімків, що містить оптико-електронну цифрову камеру, електронні блоки формування, обробки інформації, пам'яті, запису та зберігання інформації, які встановлюються на носії, та геодезичні опорні знаки, які встановлюються на місцевості для зйомки, який відрізняється тим, що кожний геодезичний опорний знак містить контрастні візирні фігури, розташовані на горизонтальній площині у вигляді пар діаметрально протилежних гострокутних секторів, розміщених по колу.
Текст
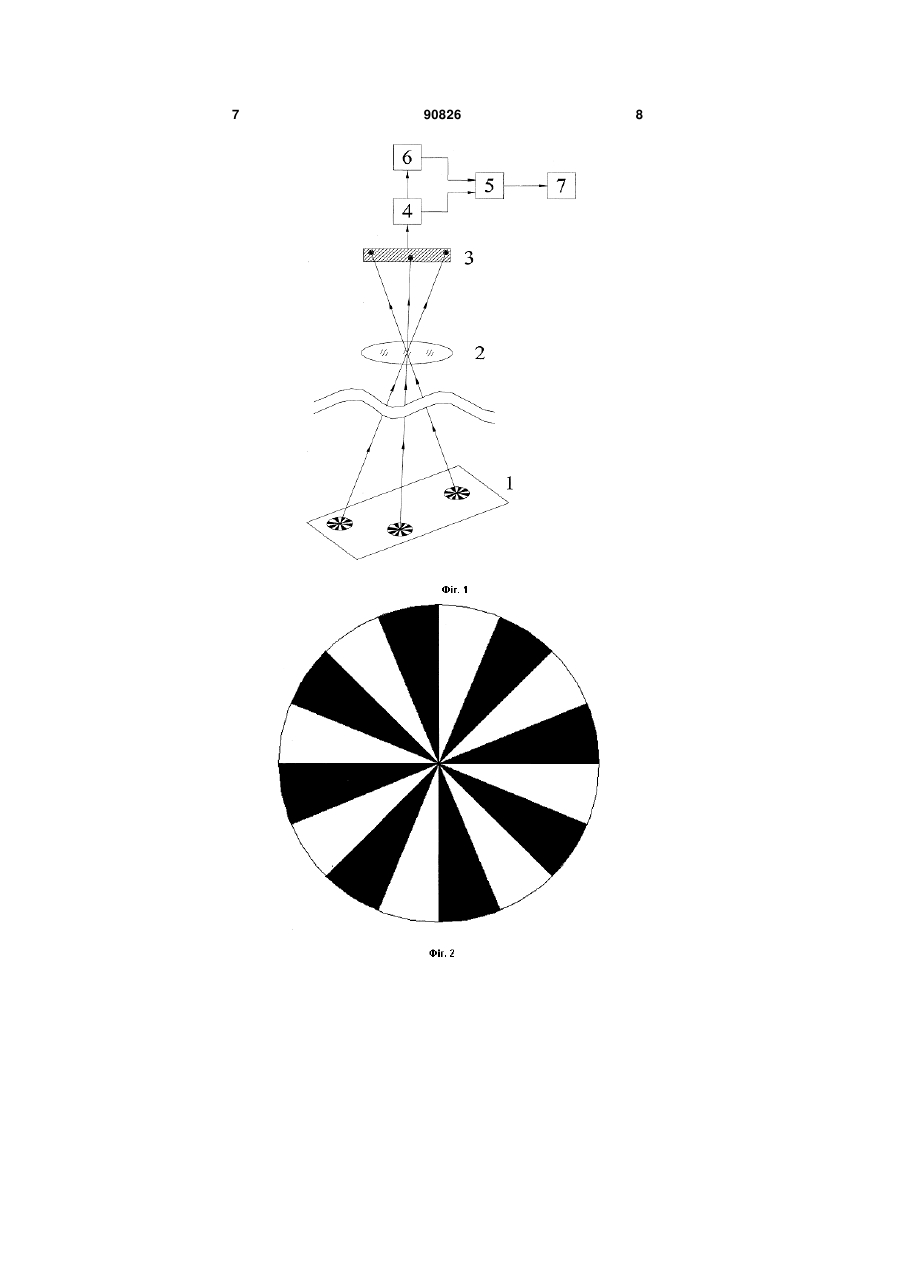
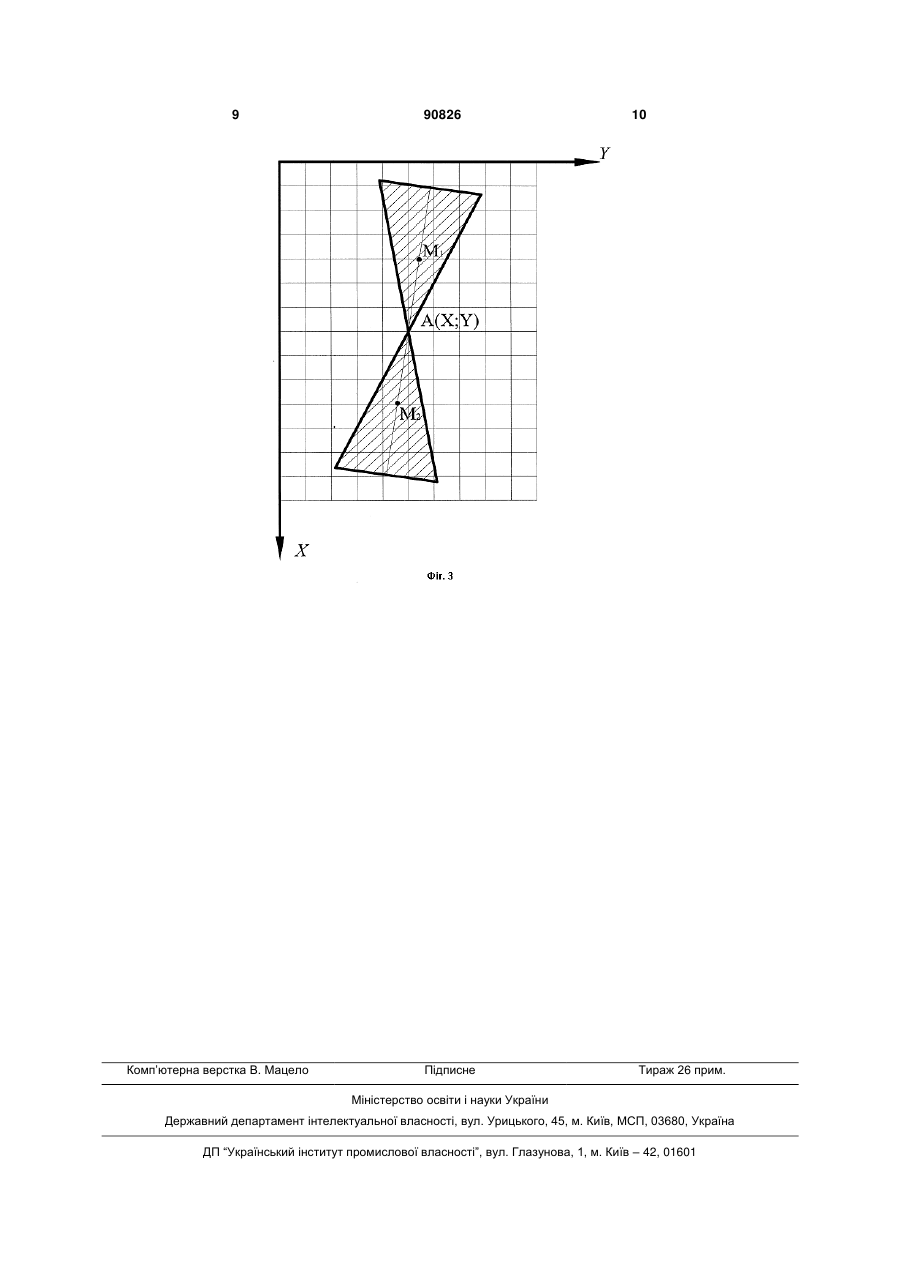
1. Спосіб геодезичної прив'язки аерокосмічних знімків, заснований на субпіксельній технології, C2 2 (19) 1 3 Поставлена задача вирішується також за рахунок створення пристрою для геодезичної прив’язки аерокосмічних знімків, що містить оптико-електронну цифрову камеру, електронні блоки формування, обробки інформації, пам’яті, запису та зберігання інформації, які встановлюються на носії, та геодезичні опорні знаки, які встановлюються на місцевості для зйомки, який відрізняється тим, що кожний геодезичний опорний знак містить контрастні візирні фігури, розташовані на горизонтальній площині у вигляді пар діаметрально протилежних гострокутних секторів розміщених по колу. Технічним результатом є суттєве підвищення точності дешифрування та прив'язки аерокосмічних знімків на рівні точності, потрібної для створення крупномасштабних топографічних карт. Запропонований спосіб може бути реалізований пристроєм, блок-схема якого зображена на Фіг.1: 1 - геодезичні знаки на горизонтальній площині; 2 - об'єктив цифрової камери; 3 - матричний фотоприймач; 4 - блок формування; 5 - блок обробки інформації; 6 - блок пам'яті; 7 - блок запису та зберігання інформації; Геодезичний знак (Фіг.2) складається з деякої кількості контрастних секторних фігур, утворених лініями діаметрів та розташованих по колу (при цьому темні та світлі фігури чергуються). Для виконання прив'язки аерокосмічних знімків деяка кількість геодезичних знаків розміщується на місцевості на горизонтальній площині (позиція 1 на Фіг.1), наприклад, на даху будинку. Розмір знака повинен бути таким, що задовольняє вимоги точності виконуваних робіт. При цьому, чим більший діаметр геодезичного знака та менше кут між лініями діаметрів, тим вище роздільна здатність. Блоки 2-7 (на Фіг.1) розташовані на борту космічного об'єкта, з якого і виконується зйомка. При зніманні цифровою камерою (позиція 2 на Фіг.1) геодезичних знаків (позиція 1 на Фіг.1) в площині зображень камери на мішені фотоприймача (позиція 3 на Фіг.1) отримують спроектоване зображення гострокутних секторних фігур. Будемо розглядати такий варіант чутливості матриці, при якому піксель ініціює електричний сигнал у разі засвічування не менше як половини його площі. У такому випадку піксель вважатимемо засвіченим (розглядаючи світлу фігуру відносно темної або навпаки). Введемо поняття лінії фронту - це контрастна лінія переходу від темної фігури до світлої та навпаки (тобто це є радіус зображення геодезичного знака). При цьому, якщо рухатися зліва направо вздовж осі рядків у випадку визначення координати Y (або у випадку руху зверху вниз вздовж осі стовпців при визначенні координати X), то перша лінія секторної радіальної фігури по напрямку руху - це лінія переднього фронту, друга лінія - лінія заднього фронту фігури. 90826 4 Рахування пікселів на мішені матричного фотоприймача виконується зліва направо по осі Y (i 1; n ) та зверху вниз по осі Y ( j 1; m) . На Фіг.1 лініями зі стрілками показано оптичні промені, що йдуть від об'єкту зйомки (багатосекторних геодезичних знаків) через об'єктив цифрової камери 2 на матричний фотоприймач 3. Дані вимірювань - номера засвічених пікселів по рядках (стовпцях) матриці перед лінією переднього і за лінією заднього фронту (над лінією переднього і під лінією заднього фронту) зображень вибраних пар діаметрально протилежних секторних фігур потрапляють у блок формування 4. У блоці 4 виконується формування звітів по рядках та стовпцях. Зображення геодезичного знака з багатосекторними гострокутними фігурами розміщується на мішені матричного фотоприймача в момент фотографування цифровою камерою випадковим чином, а тому кути, які утворюються медіанами секторних фігур та лініями рядків та стовпців пікселів, є теж довільними та рівноймовірними. Якщо зображення геодезичного знака розташувалось на мішені матричного фотоприймача у момент фотографування таким чином, що лінія медіани деякої пари діаметрально протилежних секторних фігур паралельна (перпендикулярна) лінії стовпців (рядків) матриці, то значення координат вершин для кожної фігури з цієї пари діаметрально протилежних секторних фігур буде однаковим і визначить, таким чином, координати центра зображення геодезичного знака однозначно. Якщо ж таких пар фігур немає, то для того, щоб отримати максимальну точність дешифрування аерокосмічних знімків, вибирають дві пари діаметрально протилежних секторних фігур, медіани яких утворюють якнайменші кути відхилення з лініями стовпців і рядків мішені матричного фотоприймача. Для визначення положення центра зображення геодезичного знака по осі рядків Y, розглядають пару діаметрально протилежних секторних фігур з найменшим кутом між медіанами цих фігур та лінією стовпців мішені матриці (мінімальність кутового відхилення визначають візуально). Відстань по осі рядків між центрами медіан для фігур такої пари (точки М1 та М2 на Фіг.3) є мінімальною серед усіх пар, при цьому самі центри медіан є симетричними відносно лінії стовпців матриці (тобто містять похибки однакові за величиною та протилежні за знаком), а тому відхилення координати вершини фігури по осі рядків (тобто відхилення координати по осі рядків центрів медіан М1 та М2), визначених з такої пари фігур, від істинного значення є теж мінімальним. У цьому випадку координати в пікселях по осі рядків Y центрів медіан вибраних пар секторних фігур обчислюється за формулою: AY 1 2N p tк a iП a iЗ 1 , (1) tn де aіП - номер пікселя в рядку перед лінією переднього фронту фігури; аіЗ - номер пікселя в рядку за лінією заднього фронту фігури; 5 90826 Np - кількість робочих рядків пікселів (по яких проводиться сумування); tп - номер початкового рядка відліку пікселів; tк - номер кінцевого рядка відліку пікселів. Далі остаточно визначають координату по осі рядків центра зображення геодезичного знака як середнє значення обчислених координат для кожної радіальної фігури з обраної пари діаметрально протилежних секторних фігур. Для визначення положення центра зображення геодезичного знака по осі стовпців X, розглядають пару діаметрально протилежних секторних фігур з найменшим кутом між медіанами цих фігур та лінією рядків мішені матриці. Відстань по осі стовпців між центрами медіан такої пари фігур є мінімальною серед усіх пар. Координати в пікселях по осі стовпців Х центрів медіан діаметрально протилежних секторних фігур визначають за формулою: AX 1 2N ст Sк a jП a jЗ 1 . (2) Sn де ajП - номер пікселя в стовпці над лінією переднього фронту фігури; ajЗ - номер пікселя в стовпці під лінією заднього фронту фігури; Ncт - кількість робочих стовпців пікселів (по яких проводиться сумування); sп - номер початкового стовпця відліку пікселів; sк - номер кінцевого стовпця відліку пікселів. Далі остаточно визначають координату по осі стовпців центра зображення геодезичного знака як середнє значення обчислених координат для кожної радіальної фігури з обраної пари діаметрально протилежних секторних фігур. Якщо пару діаметрально протилежних радіальних фігур з найменшими кутами між медіанами та лініями рядків або стовпців матриці візуально однозначно визначити не вдається, то в такому випадку проводять обчислення для різних пар фігур. Після чого вибирають пару діаметрально протилежних фігур з найменшими розходженнями по 6 тих координатах центрів медіан, що визначаються, звідки далі обчислюють середнє значення, отримуючи координати центра зображення геодезичного знака по осі рядків або стовпців. Отриманий результат із блока 4 (Фіг.1) передають в блок обробки інформації 5. Одночасно із блока 4 в блок 6 передають дані: код візирної цілі, відносне положення ліній переднього і заднього фронтів зображення візирної цілі. По цим даним блок пам'яті 6 видає в блок 5 характеристики візирної цілі (координати геодезичного знака). У блоці 5 виконується додавання відліків по передньому і задньому фронтах зображення секторних фігур і знаходження середнього по кожному рядку та стовпцю. Після цього виконується додавання середніх відліків по рядках і стовпцях та розподіл отриманої суми на кількість рядків та стовпців, по яких були отримані відліки ліній переднього і заднього фронтів зображення секторних фігур. При цьому обчислюють координати центрів медіан по осі рядків та осі стовпців для двох вибраних пар діаметрально протилежних секторних фігур за формулами (1) і (2) відповідно, а потім остаточно визначають координати центрів кожного з зображень геодезичних знаків як середні значення обчислених координат центрів медіан вибраних пар діаметрально протилежних секторних фігур. Таким чином, запропонований спосіб та пристрій геодезичної прив'язки аерокосмічних знімків дозволяють суттєво підвищити точність дешифрування та прив'язки знімків за рахунок використання субпіксельної технології з отриманням точності, необхідної для створення крупномасштабних топографічних карт. Література 1. Дейнеко В.Ф. Аэрофотогеодезия. - М.: Недра, 1968. - 328с. 2. Дорожинський О.Л., Тукай Р. Фотограмметрія: Підручник. - Львів: Видавництво Національного університету "Львівська політехніка", 2008. - 332 с. 7 90826 89 Комп’ютерна верстка В. Мацело 90826 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for geodesic tying for aerospace photographs
Автори англійськоюBelenok Vadym Yuriiovych, Burachek Vsevolod Hermanovych, Zatserkovnyi Vitalii Ivanovych, Krelshtein Petro Davydovych, Kriachok Serhii Dmytrovych
Назва патенту російськоюСпособ и устройство для геодезической привязки аэрокосмических снимков
Автори російськоюБеленок Вадим Юрьевич, Бурачек Всеволод Германович, Зацерковный Виталий Иванович, Крельштейн Петр Давидович, Крячок Сергей Дмитриевич
МПК / Мітки
МПК: G01C 11/00
Мітки: геодезичної, аерокосмічних, знімків, пристрій, спосіб, прив'язки
Код посилання
<a href="https://ua.patents.su/5-90826-sposib-ta-pristrijj-dlya-geodezichno-privyazki-aerokosmichnikh-znimkiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій для геодезичної прив’язки аерокосмічних знімків</a>
Спосіб виправлення цифрових аерокосмічних зображень, спотворених вздовж стовпчиків
Номер патенту: 79127
Опубліковано: 25.05.2007
Автори: Станкевич Сергій Арсенійович, Бушуєв Євген Іванович, Попов Михайло Олексійович
Мітки: аерокосмічних, зображень, спосіб, виправлення, вздовж, стовпчиків, спотворених, цифрових
Формула / Реферат:
1. Спосіб виправлення цифрових аерокосмічних зображень, спотворених вздовж стовпчиків, за яким обчислюють дискретний Фур'є-образ спотвореного зображення, оцінюють просторово-частотний оператор спотворення, далі обчислюють обернений до просторово-частотного оператора спотворення виправляючий просторово-частотний оператор, який застосовують до дискретного Фур'є-образа спотвореного цифрового аерокосмічного зображення, та виконують виправлення...
Електропривідний пристрій для демонстрації знімків
Номер патенту: 27071
Опубліковано: 28.02.2000
Автор: Йонг Кван Ю
МПК: G03B 23/00
Мітки: електропривідний, пристрій, знімків, демонстрації
Формула / Реферат:
1. Электроприводное устройство для демонстрации снимков, содержащее демонстрационную секцию для просмотра снимков, включающую корпус с передним смотровым окном, выполненным в верхней части его передней панели, и задним смотровым окном, выполненным в нижней части его задней панели, держатели снимков, отличающееся тем, что держатели снимков выполнены циркулирующими между верхним и нижним положениями в корпусе, а также в устройство введены...
Спосіб тематичного дешифрування аерокосмічних зображень
Номер патенту: 88921
Опубліковано: 10.12.2009
Автори: Федоровський Олександр Дмитрович, Якимчук Владислав Григорович, Павлюков Сергій Сергійович
МПК: G06K 9/00
Мітки: тематичного, аерокосмічних, зображень, дешифрування, спосіб
Формула / Реферат:
Спосіб тематичного дешифрування аерокосмічних зображень об'єктів, при якому для об'єктів заданих класів, що підлягають дешифруванню, заздалегідь формують апріорний список допустимих значень морфометричних показників місцевості, вибирають аркуш цифрової карти місцевості, що вміщує зображену ділянку місцевості, прив'язують до нього зображення, яке дешифрується, та зчитують з вибраного аркуша карти реальні значення морфометричних показників,...
Спосіб та пристрій для вимірювання перевищень
Номер патенту: 46413
Опубліковано: 25.12.2009
Автори: Параніч Віктор Петрович, Малік Тетяна Миколаївна, Бурачек Всеволод Германович, Нисторяк Іван Олександрович
МПК: G01C 5/00
Мітки: спосіб, перевищень, вимірювання, пристрій
Формула / Реферат:
Спосіб вимірювання перевищень, що заснований на методі геометричного нівелювання при використанні автоматизованого нівеліра з багатоелементним матричним фотоприймачем та двох рейок з нанесеними на їх поверхню шкалами, який відрізняється тим, що відліки на рейках виконують за V-подібними індексами на рейках з горизонтальною орієнтацією бісектриси V-подібного індексу, рядки мішені орієнтують багатоелементним матричним фотоприймачем по напрямку...
Спосіб підвищення спектральної розрізненності багатоспектральних аерокосмічних зображень
Номер патенту: 81195
Опубліковано: 10.12.2007
Автори: Козлова Анна Олександрівна, Станкевич Сергій Арсенійович, Попов Михайло Олексійович
МПК: G06K 9/80, G06K 9/00, G06K 9/46, G06K 9/62
Мітки: аерокосмічних, спектральної, підвищення, багатоспектральних, розрізненності, зображень, спосіб
Формула / Реферат:
Спосіб підвищення спектральної розрізненності багатоспектральних аерокосмічних зображень, при якому одержують функції спектральної чутливості існуючих спектральних каналів багатоспектрального аерокосмічного зображення, які перекриваються за спектром, визначають функцію спектральної чутливості додаткового спектрального каналу та розраховують сигнал у кожному пікселі додаткового спектрального каналу багатоспектрального аерокосмічного...
Попередній патент: Екзотермічна суміш для одержання термітної швидкорізальної сталі р6м3л
Наступний патент: Спосіб автоматичного регулювання процесу горіння гранульованого палива
Випадковий патент: Стартер для запалювання люмінесцентних ламп