Спосіб визначення технології контрейлерних перевезень за допомогою автоматизованої евристичної системи
Номер патенту: 83806
Опубліковано: 25.09.2013
Автори: Шраменко Наталя Юріївна, Процик Олександр Петрович, Нагорний Євген Васильович

Формула / Реферат
1. Спосіб визначення технології контрейлерних перевезень здійснюють з використанням автоматизованого робочого місця (АРМ) оператора логістичного центру термінала та АРМ вузлового диспетчера (ДНЦ), при якому моделюють рух великовантажних автомобілів по електронній мапі, який відрізняється тим, що передбачає формування системи, яка складається з електронно-обчислювальної техніки, апаратних засобів, програмного забезпечення, вхідних параметрів місцевості, а саме комплексу технологічних показників та системи обмежень, ці показники обробляють та використовують у математичних моделях.
2. Спосіб за п. 1, який відрізняється тим, що інформація про переміщення завантаженого автомобіля за допомогою GPS-трекера передається одночасно на АРМ оператора терміналу та на АРМ ДНЦ, який формує вантажний потяг зі спеціалізованими платформами для контрейлерних перевезень, що обумовлює взаємоузгодження дій між учасниками перевезення та синхронізацію технологічних операцій.
3. Спосіб за п. 1 і 2, який відрізняється тим, що в системі використовують евристичний алгоритм, при якому в залежності від прийняття системою оптимальних технологій, що характеризуються мінімальним часом переміщення вантажу, система повертається на початковий етап, на якому вхідні дані виключаються і/або доповнюються.
4. Спосіб за п. 1-3, який відрізняється тим, що контрейлерний рух застосовують як у міжнародному, так і у внутрішньому сполученні не в складі контрейлерного потягу, а шляхом включення у склад потягу окремих спеціалізованих вагонів-платформ.
Текст
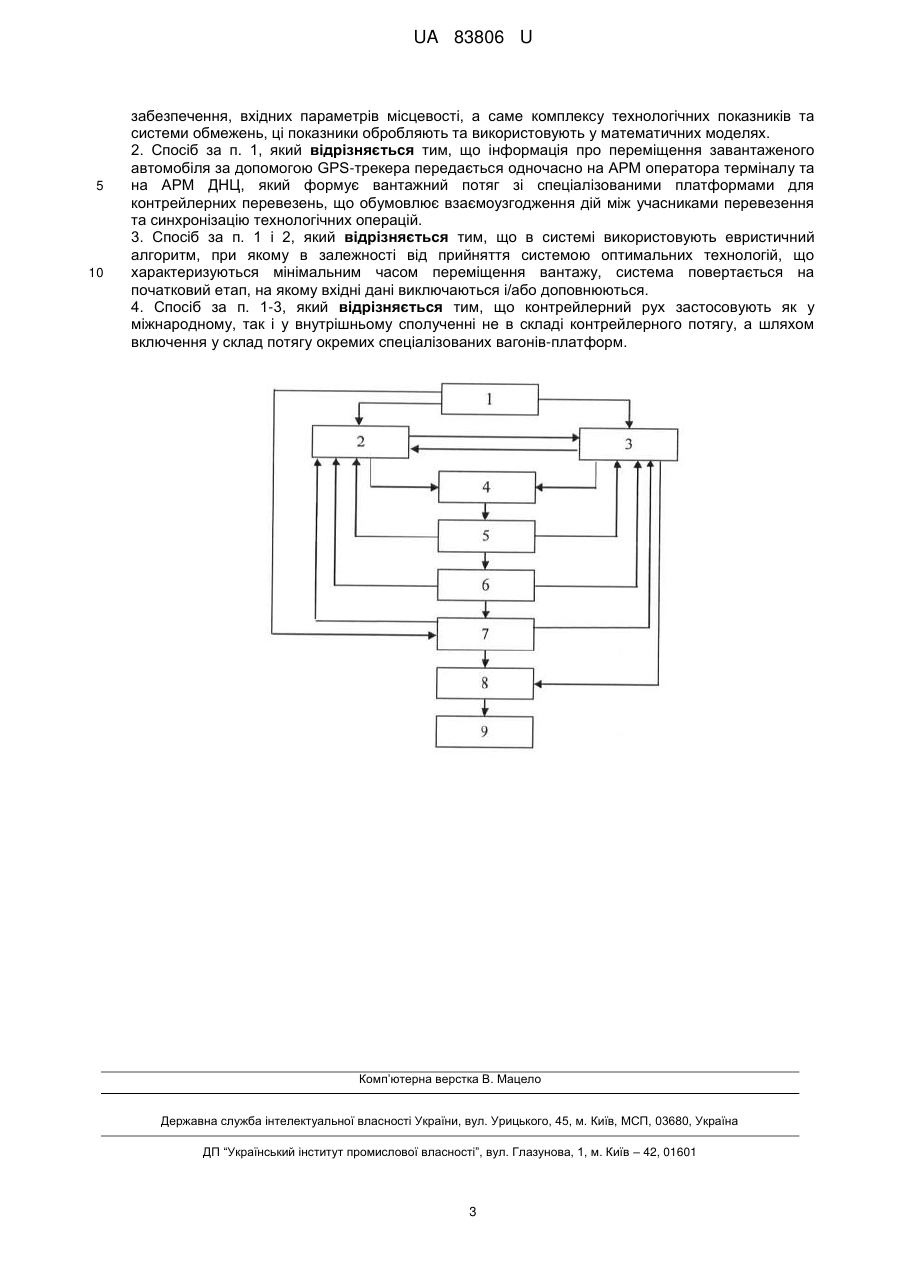
Реферат: Спосіб визначення технології контрейлерних перевезень здійснюють з використанням автоматизованого робочого місця (АРМ) оператора логістичного центру термінала та АРМ вузлового диспетчера (ДНЦ), при якому моделюють рух великовантажних автомобілів по електронній мапі. Передбачає формування системи, яка складається з електроннообчислювальної техніки, апаратних засобів, програмного забезпечення, вхідних параметрів місцевості, а саме комплексу технологічних показників та системи обмежень, ці показники обробляють та використовують у математичних моделях. UA 83806 U (12) UA 83806 U UA 83806 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до способів визначення технології контрейлерних перевезень за допомогою автоматизованої евристичної системи: збір та обробка інформації про місцезнаходження завантаженого автомобіля при його переміщенні в конкретний момент часу, визначення мінімального часу пересування вантажу від терміналу відправлення до терміналу призначення та оптимального маршруту руху завантаженого автомобіля з (до) терміналу до (з) залізничної станції на реальній місцевості в реальному режимі часу, формування вантажного потягу з включенням у його склад спеціалізованих платформ з урахуванням реального часу виконання окремих технологічних операцій, взаємоузгодження дій між учасниками перевезення для синхронізації технологічних операцій по доставці вантажу. Найбільш близьким аналогом до корисної моделі, що заявляється, за технічною суттю і призначенням є технологія контрейлерних перевезень в міжнародному сполученні [Демин Ю.В., Кирпа Г.Н., Пшинько А.Н., Савчук О.М., Степанов В.В. "Проблемы бесперегрузочных и комбинированных перевозок" // Залізничний транспорт України. 1998, № 1, с. 37-42; Шульман А. "Автопоезда на платформах - новые технологии транспорта" // Транспорт. 2003, № 14, с. 58-59; Каткевич В. "Транспортный хит сезона" // Логистика. 2003, № 16, с. 18-21]. Спосіб передбачає формування виключно із спеціалізованих платформ регулярних контрейлерних потягів, що прямують у міжнародному сполученні. Недоліками цього способу виступають: неврахування можливості включення окремих спеціалізованих платформ до складу вантажних потягів, що курсують у внутрішньому сполученні; не передбачено визначення раціональної технології контрейлерних перевезень у заданих умовах в реальному режимі часу; неузгодженість дій учасників перевезення для мінімізації часу переміщення вантажу. Існуючі технології контрейлерних перевезень не передбачають застосування у внутрішньому сполученні окремих спеціалізованих вагонів-платформ у складі вантажних потягів. Крім того, при організації контрейлерного руху не використовується інформація про місцезнаходження завантаженого автомобіля при його переміщенні в конкретний момент часу та не передбачається взаємоузгодження дій між учасниками контрейлерного перевезення. В основу корисної моделі поставлена задача створити таку систему визначення раціональної технології контрейлерних перевезень як в міжнародному, так і у внутрішньому сполученні у заданих умовах, що дозволить виключити людський фактор, будучи автоматизованою, вдосконалити якість отримуваної інформації, що реалізовується шляхом надання системі евристичного характеру, модернізувати збір та обробку інформації про місцезнаходження завантаженого автомобіля при його переміщенні в конкретний момент часу, здійснити оптимізацію маршруту руху автомобіля та взаємоузгодження дій учасників перевезення для синхронізації технологічних операцій з метою мінімізації загального часу переміщення вантажу. В інформаційну систему автоматизованого робочого місця (АРМ) оператора логістичного центру термінала (оператора терміналу) задаються параметри контрейлерного перевезення, очікуваний час відправлення завантаженого автомобіля на залізничну станцію та обмеження щодо маршруту прямування на певний період. Ці дані заздалегідь передаються в інформаційну систему АРМ вузлового диспетчера (ДНЦ), де проводиться декілька експериментів, для яких відрізняються технологічні параметри перевезення, а саме час відправлення автомобіля з (на) терміналу та маршрут прямування на (з) залізничну станцію з системою обмежень, по формуванню технології контрейлерного перевезення з використанням імітаційної моделі. Результатом є множина технологій контрейлерного перевезення з різними параметрами загального часу. Після цього оператор терміналу та ДНЦ узгоджують можливість застосування оптимальної технології та ДНЦ приймає остаточне рішення по вибору технології контрейлерного перевезення у певному періоді Uрац з множини технологій U, що були отримані під час імітаційного моделювання. Рішення приймається виходячи з того, що технологія повинна забезпечити мінімальний час просування вантажу. Після цього за обраною технологією здійснюється контрейлерне перевезення, при цьому інформація про рух завантаженого автомобіля за допомогою GPS-трекера передається одночасно на АРМ оператора терміналу та на АРМ ДНЦ, який з урахуванням реального часу виконання окремих технологічних операцій формує вантажний потяг з включенням у його склад спеціалізованих платформ. Технічний результат запропонованої корисної моделі полягає в створенні програмноапаратного комплексу, що за допомогою моделювання руху великовантажних автомобілів на електронній мапі дозволяє визначати оптимальну технологію контрейлерних перевезень з множини альтернатив, досягти синхронізацію технологічних операцій при взаємодії учасників перевезення, виконати аналіз з використанням графічного інтерфейсу користувача та отримувати розгорнуті дані щодо руху вантажних автомобілів на реальній місцевості, а саме: інформацію про місцезнаходження завантаженого автомобіля в конкретний час, прогнозну 1 UA 83806 U 5 10 15 20 25 30 35 40 45 50 інформацію щодо напрямків руху завантажених автомобілів в часі та просторі, комплексну (кількісну, якісну) інформацію щодо руху завантажених автомобілів за певний проміжок часу. Поставлена задача вирішується за допомогою моделювання руху завантажених автомобілів по електронній мапі, для чого використовується як отримана з використанням GPS-трекера інформація про рух завантажених автомобілів на реальній місцевості в реальному режимі часу, так і інформація, що отримана в результаті надання системі евристичного характеру. Спосіб передбачає формування системи, яка складається з електронно-обчислювальної техніки, апаратних засобів, програмного забезпечення, вхідних параметрів місцевості, а саме комплексу технологічних показників та системи обмежень, ці показники обробляють та використовують у математичних моделях. Фігура зображує схему способу вибору технології контрейлерних перевезень, спроможній видати прийнятне рішення проблеми серед множини альтернатив, знайти рішення, близьке до найкращого і зробити це якнайшвидше. Визначення технології контрейлерних перевезень за допомогою автоматизованої евристичної системи здійснюють наступним чином. До АРМ користувачів надходить інформація від сумісних інформаційних систем (1): дислокація терміналів, їх кількість, комплекс технологічних показників руху, місцезнаходження завантаженого автомобіля в певний момент часу, параметри місцевості та система обмежень. Оператор терміналу задає обсяги партій відправки, час відправлення автомобіля з терміналу на певний період (2). Вузловий диспетчер в інформаційну систему (3) задає графік руху вантажних потягів, технологічні параметри щодо формування вантажного потягу зі спеціалізованими платформами для контрейлерних перевезень. Інформація (1, 2, 3) поступає на вхід імітаційної моделі (4), при цьому формується множина можливих технологій (5), що виводяться до інтерфейсу користувача (6). Після надходження інформації щодо місцезнаходження автомобіля за допомогою моделювання обирається маршрут руху автомобіля та визначається час його прибуття на залізничну станцію (7). Якщо на будь-якому етапі (4-7) не вдається знайти оптимальне рішення задачі, або задачу вирішити неможливо, оператор терміналу та ДНЦ взаємоузгоджують дії та здійснюють коригування параметрів моделювання (2, 3), після чого проводяться експерименти, для яких відрізняються технологічні параметри перевезення з системою обмежень, поки ДНЦ не буде прийняте рішення щодо найбільш прийнятної технології контрейлерних перевезень для певного періоду (8) та оператор і ДНЦ отримують рекомендації з можливістю формування аналітичних звітів (9). Пропонована корисна модель, яка є доповненням до АРМ оператора терміналу та до АРМ ДНЦ, розширює існуючі можливості цих користувачів: дозволяє визначити раціональну технологію контрейлерних перевезень з урахуванням мінімізації загального часу доставки вантажів; отримувати інформацію про місцезнаходження завантаженого автомобіля в конкретний час; забезпечує взаємоузгодження дій учасників перевезення та синхронізацію технологічних операцій при доставці вантажів; можливість прийняття управлінських рішень при виникненні непередбачуваної ситуації шляхом внесення корективів в існуючу технологію; візуалізація результатів моделювання та можливість накопичення отриманих даних з метою подальшого аналізу та оцінки параметрів роботи рухомого складу за певний період. Тим самим, підвищується ефективність використання рухомого складу, прискорюється оборот автомобілів, зменшується їх потрібна кількість, зменшуються витрати на експлуатацію та утримання парку рухомого складу, прискорюється рух матеріального потоку, підвищується якість транспортного обслуговування вантажовласників, а додаткові інформаційні можливості АРМ оператора терміналу та АРМ ДНЦ дозволяють цим користувачам більш оперативно та обґрунтовано приймати управлінські рішення. Пропонована корисна модель розширює існуючі можливості контрейлерного руху як у міжнародному, так і у внутрішньому сполученні не в складі контрейлерного потягу, а шляхом включення у склад потягу окремих спеціалізованих вагонівплатформ, що подовжує термін служби та забезпечує зниження завантаженості автомобільних доріг, зниження криміногенної та аварійної обстановки на автодорогах, значне зниження забруднення навколишнього середовища. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 1. Спосіб визначення технології контрейлерних перевезень здійснюють з використанням автоматизованого робочого місця (АРМ) оператора логістичного центру термінала та АРМ вузлового диспетчера (ДНЦ), при якому моделюють рух великовантажних автомобілів по електронній мапі, який відрізняється тим, що передбачає формування системи, яка складається з електронно-обчислювальної техніки, апаратних засобів, програмного 2 UA 83806 U 5 10 забезпечення, вхідних параметрів місцевості, а саме комплексу технологічних показників та системи обмежень, ці показники обробляють та використовують у математичних моделях. 2. Спосіб за п. 1, який відрізняється тим, що інформація про переміщення завантаженого автомобіля за допомогою GPS-трекера передається одночасно на АРМ оператора терміналу та на АРМ ДНЦ, який формує вантажний потяг зі спеціалізованими платформами для контрейлерних перевезень, що обумовлює взаємоузгодження дій між учасниками перевезення та синхронізацію технологічних операцій. 3. Спосіб за п. 1 і 2, який відрізняється тим, що в системі використовують евристичний алгоритм, при якому в залежності від прийняття системою оптимальних технологій, що характеризуються мінімальним часом переміщення вантажу, система повертається на початковий етап, на якому вхідні дані виключаються і/або доповнюються. 4. Спосіб за п. 1-3, який відрізняється тим, що контрейлерний рух застосовують як у міжнародному, так і у внутрішньому сполученні не в складі контрейлерного потягу, а шляхом включення у склад потягу окремих спеціалізованих вагонів-платформ. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюShramenko Natalya Yuriivna, Nahornyi Yevhen Vasyliovych, Protcyk Oleksandr Petrovych
Автори російськоюШраменко Наталья Юрьевна, Нагорный Евгений Васильевич, Процик Александр Петрович
МПК / Мітки
МПК: B61L 27/00, G06G 7/00
Мітки: спосіб, визначення, автоматизованої, контрейлерних, перевезень, евристичної, допомогою, технології, системі
Код посилання
<a href="https://ua.patents.su/5-83806-sposib-viznachennya-tekhnologi-kontrejjlernikh-perevezen-za-dopomogoyu-avtomatizovano-evristichno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення технології контрейлерних перевезень за допомогою автоматизованої евристичної системи</a>
Спосіб моделювання (моніторингу) людино-потоків за допомогою автоматизованої евристичної системи
Номер патенту: 59515
Опубліковано: 25.05.2011
Автор: Баранова Олена Ігорівна
МПК: G06N 7/00, G06F 19/00, G06Q 10/00, G06Q 90/00, G06Q 50/00
Мітки: людино-потоків, моніторингу, спосіб, автоматизованої, системі, моделювання, евристичної, допомогою
Формула / Реферат:
1. Спосіб моделювання (моніторингу) людино-потоків за допомогою автоматизованої евристичної системи, при якому моделюють рух віртуальних манекенів по електронній мапі, який відрізняється тим, що передбачає формування системи, яка складається з електронно-обчислювальної техніки, апаратних засобів, програмного забезпечення, вхідних соціально-демографічних параметрів місцевості, що моніториться, а саме комплексу кількісних показників,...
Спосіб автоматизованої організації й контролю вантажних перевезень
Номер патенту: 80380
Опубліковано: 27.05.2013
Автор: Сєнін Костянтин Олександрович
МПК: G08G 1/123, G08G 1/01, G08G 1/052
Мітки: контролю, перевезень, автоматизованої, спосіб, вантажних, організації
Формула / Реферат:
Спосіб автоматизованої організації й контролю вантажних перевезень, що включає визначення під час руху реального місця знаходження транспортного засобу за допомогою встановленого в транспортному засобі бортового пристрою, що містить приймач систем глобального позиціонування, та передачу через пристрій передачі сигналів координат реального місця знаходження транспортного засобу на системний блок центру обробки даних, який відрізняється тим,...
Автоматизована система для визначення ресурсозберігаючої технології за допомогою імітаційного моделювання
Номер патенту: 68848
Опубліковано: 10.04.2012
Автори: Кулешов Антон Валерійович, Кулешов Валерій Вячеславович
МПК: B61L 25/00, B61L 15/00, B61L 27/00
Мітки: технології, ресурсозберігаючої, визначення, автоматизована, моделювання, імітаційного, допомогою, система
Формула / Реферат:
Автоматизована система для визначення ресурсозберігаючої технології за допомогою імітаційного моделювання, що містить автоматизоване робоче місце інженера служби перевезень залізниці (АРМ Д), засоби технічного розвитку станцій у вузлах залізничної мережі, екран відображення інформації, пристрій введення початкової інформації в АС "Месплан" і базу даних АРМ Д сценаріїв вагонопотоків, а також локальну обчислювальну мережу, що містить...
Автоматизована система для вибору ресурсозберігаючої технології за допомогою логістичних методів
Номер патенту: 72286
Опубліковано: 10.08.2012
Автори: Кулешов Антон Валерійович, Кулешов Валерій Вячеславович
МПК: B61L 27/00, B61L 25/00, B61L 15/00
Мітки: ресурсозберігаючої, технології, автоматизована, система, логістичних, методів, вибору, допомогою
Формула / Реферат:
Автоматизована система для вибору ресурсозберігаючої технології за допомогою логістичних методів, яка включає автоматизоване робоче місце інженера служби транспортного логістичного центру (АРМ ТЛЦ), яке з'єднано каналом зв'язку з засобами технічного розвитку станцій у вузлах залізничної мережі; екран відображення інформації; пристрій введення початкової інформації в АС "Месплан" і базу даних АРМ Д сценаріїв вагонопотоків, а також...
Спосіб реалізації автоматизованої системи контролю за оборотом документів і товарів
Номер патенту: 54236
Опубліковано: 25.10.2010
Автори: Янгаличев Руслан Наріманович, Новіков Олексій Миколайович
МПК: G06Q 90/00, G06K 17/00
Мітки: реалізації, автоматизованої, товарів, системі, контролю, оборотом, спосіб, документів
Формула / Реферат:
Спосіб реалізації автоматизованої системи контролю за оборотом документів і товарів, який полягає у наступному: виробники (імпортери) товару за допомогою клієнтських модулів вводу даних та зв'язку виробників (імпортерів) з УА формують заявку на одержання дозволу на ввезення та реалізацію товарів та відповідну кількість захисних (маркувальних) елементів; сформована заявка надходить через блок зв'язку та маршрутизації УА до блока обробки,...
Попередній патент: Спосіб одночасного проточування довгомірних деталей складних профілів
Наступний патент: Спосіб лікування одностайним уретроцистомічним дренажем
Випадковий патент: Емаль для електростатичного нанесення