Клиновий оптичний компенсатор
Номер патенту: 84755
Опубліковано: 25.11.2008
Автори: Замосенчук Володимир Миколайович, Сербін Іван Семенович, Гордієнко Валентин Іванович, Сухомлинов Петро Панасович, Мазурін Ігор Володимирович, Хомченко Олексій Якович
Формула / Реферат
Клиновий оптичний компенсатор, що містить два оптичні клини, встановлені уздовж загальної оптичної осі під кутом один до одного, два приводи керування і два суматори, який відрізняється тим, що додатково введені два синусно-косинусних датчики кутового положення клинів (ДКПК), кожний з яких через редуктор зв'язаний кінематично з першим або другим клином і першим або другим приводом керування, два підсилювачі, два демодулятори, чотири перемножувачі аналогових сигналів (ПАС) і два аналогові запам'ятовуючі пристрої (АЗП), причому, початкова орієнтація вершин клинів відповідає куту повороту 90°, вихід першого АЗП підключено до перших входів першого і третього ПАС, вихід другого АЗП підключено до перших входів другого і четвертого ПАС, синусний вихід першого ДКПК підключено до другого входу першого ПАС, а косинусний вихід - до другого входу другого ПАС, синусний вихід другого ДКПК підключено до другого входу третього ПАС, а косинусний вихід - до другого входу четвертого ПАС, виходи першого і другого ПАС підключено до входів першого суматора, виходи третього і четвертого ПАС підключені до входів другого суматора, при цьому вихід першого суматора через перший демодулятор і другий підсилювач підключено до другого привода керування, вихід другого суматора через другий демодулятор і перший підсилювач підключено до першого привода керування, а вхід першого і другого АЗП є входами сигналів помилки відхилення оптичної осі від заданого напрямку, відповідно, за курсом і тангажем.
Текст
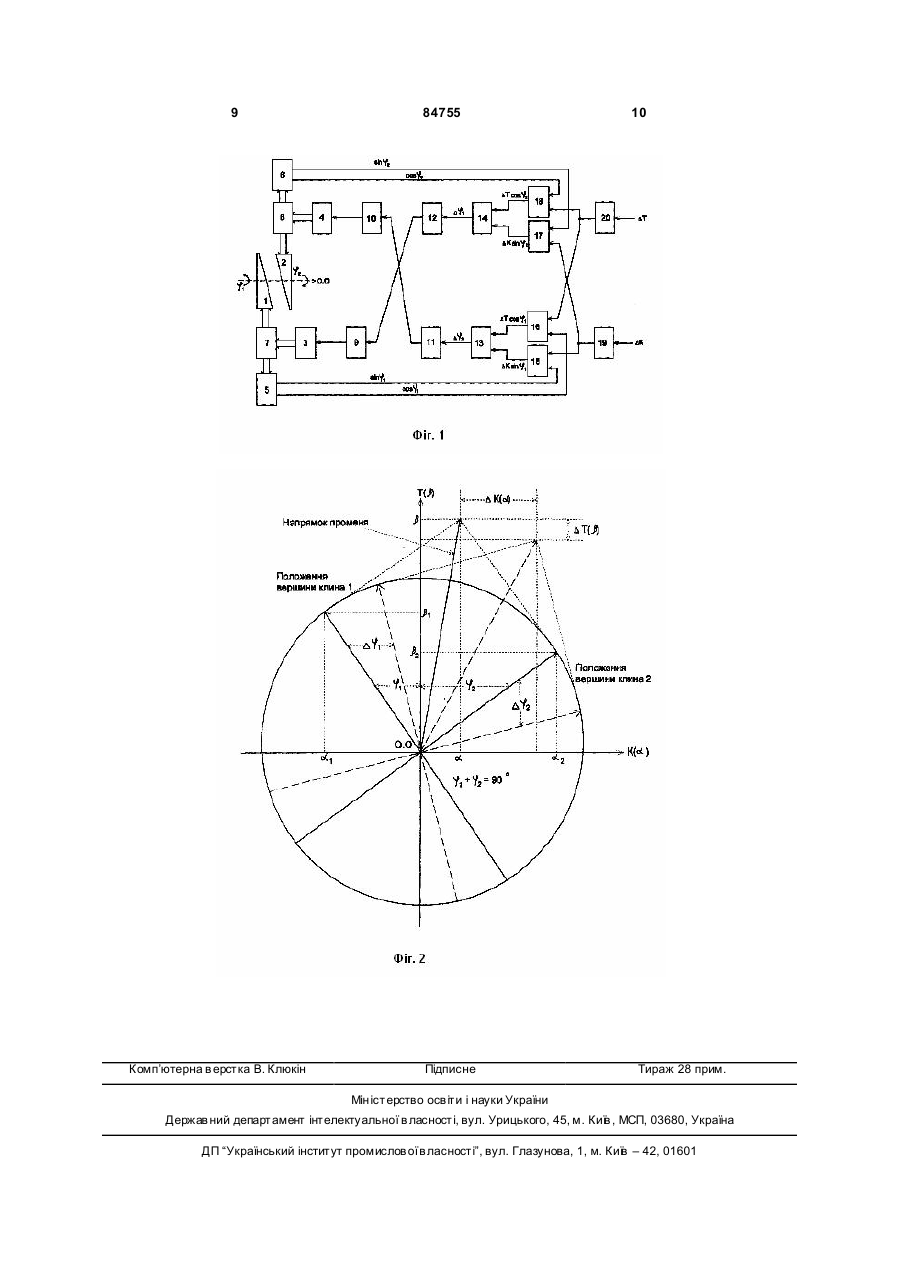
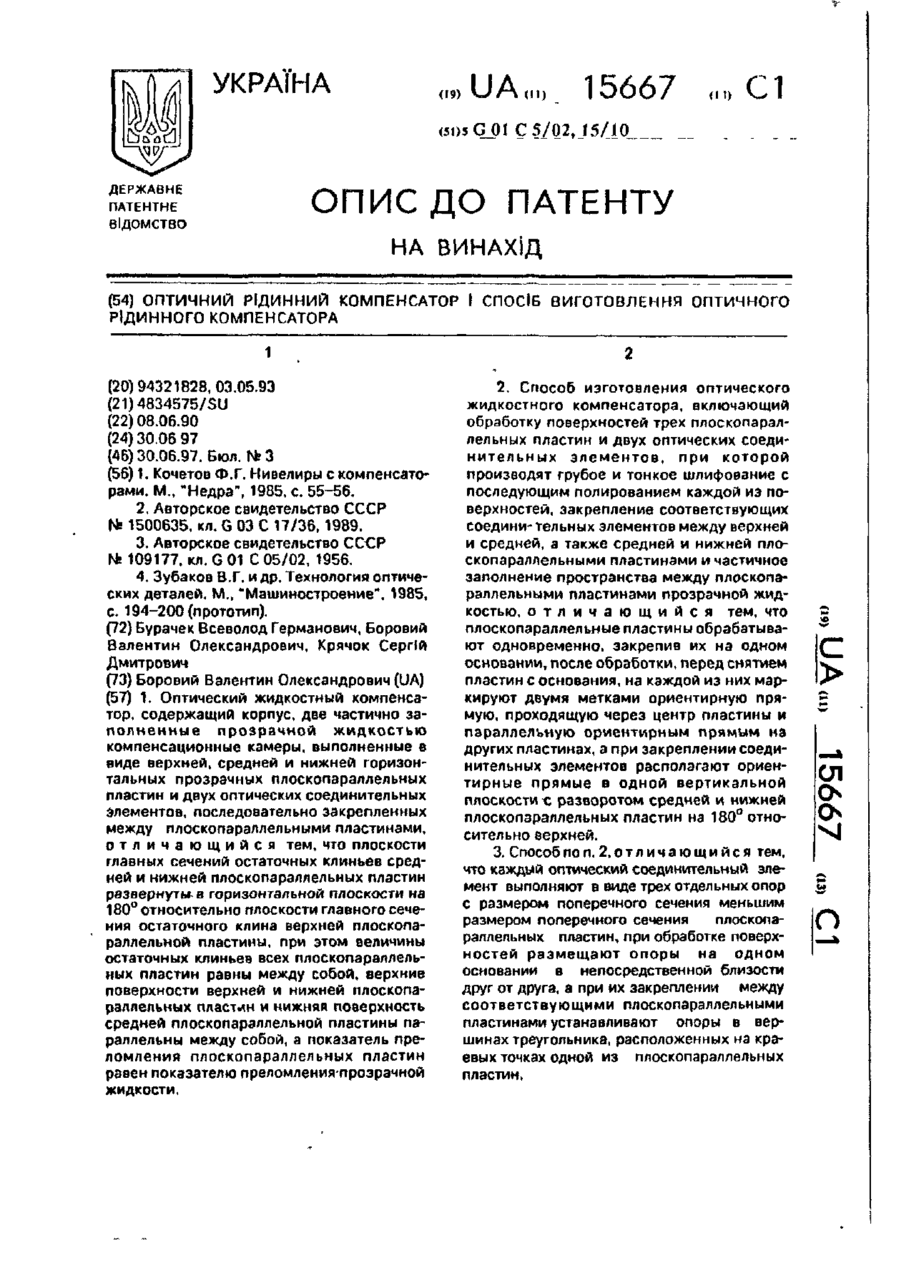
Клиновий оптичний компенсатор, що містить два оптичні клини, встановлені уздовж загальної оптичної осі під кутом один до одного, два приводи керування і два суматори, який відрізняється тим, що додатково введені два синуснокосинусних датчики кутового положення клинів (ДКПК), кожний з яких через редуктор зв'язаний C2 2 (19) 1 3 84755 променевого каналу керування з візуальним каналом оптико-електронного приціла [див. Изделие 1Г46. Руководство по эксплуатации АГИ2.378.006 РЭ / - Черкассы: НПК «Фотоприбор», 1998. -С. 2224, 63, 122], який вміщує встановлені уздовж загальної оптичної вісі два оптичні клини, вклеєні в оправи з черв'ячними зубчастими вінцями, причому, початкова орієнтація вершин клинів відповідає куту повороту 180°. Оправи з оптичними клинами приводяться до обертання відносно одне одного двома черв'яками через карданні вали, кінці яких служать для забезпечення узгодження вісі випромінювання лазерно-променевого каналу з оптичною віссю візуального каналу прицілу ручним способом. До недоліків відомого клинового компенсатору відноситься те, що для узгодження оптичних каналів потрібно багато часу, бо необхідно проводити ручне почергове обертання кожного клина. Крім того, в процесі експлуатації, для дотримання заданої точності узгодження, необхідно проводити ручне підрегулювання. Найбільш близьким технічним рішенням, обраним за прототип, є клиновий оптичний компенсатор [див. Клиновой оптический компенсатор. Авт. свид. СССР №717694, МКИ G02 В 27/00 / Ю.М. Лазеркевич и др. - №2523088/18-10; Заявл. 29.08.77; Опубл. 25.02.80, Бюл. №7], який вміщує два оптичні клини, встановлених уздовж загальної оптичної вісі під кутом один відносно іншого, причому, кожний з них наділений автоматичним приводом керування, а початкова орієнтація вершин клинів відповідає куту повороту 180°. Для формування сигналів керування приводами клинів, відомий компенсатор вміщує також прилад керування, задатчик кута повороту клинів один відносно іншого, інвертор і два суматори. Прилад керування забезпечує перетворення кутови х помилок відхилення оптичного променя за курсом D K і тангажем DT в сумарну кутову помилку відхилення j і в кут повороту площини відхилення g . Принцип роботи відомого клинового оптичного компенсатора, обраного за прототип, заключається в тому, що на привод одного з клинів поступає сигнал, що відповідає сумі кутів повороту клинів в один відносно іншого в площині відхилення оптичної вісі, а на привід другого клина поступає сигнал, що відповідає різниці кутів g і q . Таким чином, кожний клин компенсатора повертається один відносно іншого на кут q , компенсуючи при цьому сумарну помилку j відхилення оптичної вісі від заданого напрямку, і спільно один з одним на кут g , узгоджуючи при цьому площину компенсації відхилення оптичної вісі з заданою площиною її відхилення. До недоліків технічного рішення, обраного за прототип, є порівняно низька точність компенсації відхилення оптичної вісі від заданого напрямку, яка не перевищує ±1кут. хв., оскільки відсутнім є слідкучий зворотній зв'язок за кутами повороту клинів. Іншим недоліком прототипу є складність реалізації алгоритму керування компенсацією відхилення оптичної вісі від заданого напрямку у складі оптико-електронного приладу. 4 В основу винаходу поставлена задача підвищення точності компенсації відхилення оптичної вісі від заданого напрямку, а також спрощення конструкції приладу керування компенсатора. Суть винаходу клинового оптичного компенсатора, що заявляється, який вміщує два оптичні клини, встановлені уздовж загальної оптичної вісі під кутом один до одного, два приводи керування і два суматори, досягається шляхом введення двох синусно-косинусних датчиків кутового положення клина (ДКПК), кожний з яких через редуктор кінематично поєднаний з першим або другим клином і першим або другим приводом керування, двох підсилювачів, двох демодуляторів, чотирьох перемножувачів аналогових сигналів (ПАС) і двох аналогових запам'ятовуючи х пристроїв (АЗП), причому, початкова орієнтація вершин клинів відповідає куту повороту 90°, ви хід першого АЗП підключений до перших входів першого і третього ПАС, ви хід др угого АЗП підключений до перших входів др угого і четвертого П АС, синусний ви хід першого ДКПК підключено до другого входу першого ПАС, а косинусний вихід - до другого входу другого ПАС, синусний вихід другого ДКПК підключено до другого входу третього ПАС, а косинусний вихід - до другого входу че твертого ПАС , ви ходи першого та другого ПАС підключені до входів першого суматора, виходи третього і четвертого ПАС підключені до входів другого суматора, при цьому, вихід першого суматора через перший демодулятор і другий підсилювач підключений до другого привода керування, вихід другого суматора через другий демодулятор і перший підсилювач підключені до першого привода керування, а вхід першого і другого АЗП є входами сигналів помилки відхилення оптичної вісі від заданого напрямку, відповідно, за курсом і тангажем. Порівняльний аналіз технічного рішення, що заявляється, з прототипом, дозволяє зробити висновок, що клиновий оптичний компенсатор, який заявляється, відрізняється тим, що в нього введені два синусно-косинусних датчики кутового положення клинів (ДКПК), кожний з яких через редуктор кінематично пов'язаний з першим або другим клином і першим або другим приводом керування, два підсилювачі, два демодулятори, чотири перемножувачі аналогових сигналів (ПАС) і два аналогові запам'ятовуючі пристрої (АЗП), причому, початкова орієнтація вершин клинів відповідає куту повороту 90°, вихід першого АЗП підключений до перших входів першого і третього ПАС, вихід другого АЗП підключено до перших входів др угого і четвертого ПАС, синусний вихід першого ДКПК підключено до другого входу першого ПАС, а косинусний вихід – до другого входу др угого П АС, синусний вихід другого ДКПК підключено до другого входу третього ПАС, а косинусний вихід - до другого входу четвертого ПАС, виходи першого і другого ПАС підключено до входів першого суматора, виходи третього і четвертого ПАС відключені до входів другого суматора, при цьому, вихід першого суматора через перший демодулятор і другий підсилювач підключені до другого привода керування, вихід др угого суматора через другий демодулятор і перший підсилювач підключено до першого при 5 84755 вода керування, а входи першого і другого АЗП є входами сигналів помилок відхилення оптичної вісі від заданого напрямку, відповідно, за курсом і тангажем. Досягнення технічного результату при використанні клинового компенсатора, яке заявляється, у порівнянні з прототипом, полягає в підвищенні точності компенсації відхилення оптичної вісі від заданого напрямку і спрощення конструкції за рахунок введення зворотнього зв'язку в к ута х повороту оптичних клинів за допомогою синуснокосинусних датчиків кутового положення клинів і відслідковуючих електроприводів керування на постійному струмі. Суть винаходу пояснюється кресленнями, де на Фіг.1 зображена функціональна схема клинового оптичного компенсатора, що заявляється, а на Фіг.2 зображена вихідна апертура клинового оптичного компенсатора, що заявляється. Клиновий оптичний компенсатор, що заявляється, (див. Фіг.1) містить два оптичні клини 1, 2, встановлені уздовж загальної оптичної вісі (О.О) під кутом один до одного, два приводи керування 3, 4, два синусно-косинусні датчика кутового положення клина (ДКПК) 5, 6, кожний з яких через редуктор 7, 8 кінематично пов'язаний з клином 1, 2 і приводом керування 3, 4, два підсилювачі 9, 10, два демодулятори 11, 12, два суматори 13, 14, чотири перемножувачі аналогових сигналів (ПАС) 15, 16, 17, 18 і два аналогові запам'ятовуючі пристрої (АЗП) 19, 20, причому початкова орієнтація вершин клинів відповідає куту повороту 90°. При цьому, вихід першого АЗП 19 підключено до перших входів першого 15 і третього 17 ПАС, вихід другого АЗП 20 підключено до перших входів другого 16 і четвертого 18 ПАС, синусний вихід першого ДКПК 5 підключений до другого входу першого ПАС 15, а косинусний вихід - до другого входу др угого П АС 16, синусний ви хід другого ДКПК 6 підключений до другого входу третього ПАС 17, а косинусний вихід - до другого входу четвертого ПАС 18, виходи першого 15 і другого 16 ПАС підключені до входів першого суматора 13, виходи третього 17 і четвертого 18 П АС підключені до входів другого суматора 14, при цьому, ви хід першого суматора 13 через перший демодулятор 11 і другий підсилювач 10 підключений до другого привода керування 4, вихід друго го суматора 14 через другий демодулятор 12 і перший підсилювач 9 підключений до першого привода керування 3, а входи першого 19 і другого 20 АЗП є входами сигналів помилки відхилення оптичної вісі від заданого напрямку, відповідно, за курсом DК і тангажем DT. Компенсація відхилення оптичного променя від заданого напрямку з використанням клинового оптичного компенсатора, що заявляється, виконується наступним чином. Оптичні клини 1 і 2 встановлені паралельно один до одного з можливістю незалежного обертання навколо оптичної вісі у такий спосіб, що їх площини ділять вхідну апертуру навпіл і перпендикулярні до оптичної вісі, зберігаючи при цьому, відповідно до вимог, взаємне положення між вершинами клинів. Для забезпечення обертання, кли 6 ни 1 і 2 можуть бути, наприклад, встановлені в оправи з зубчастими вінцями, за допомогою яких забезпечується кінематичний зв'язок приводів керування 3 і 4 з клинами 1 і 2. Одночасно з оптичними клинами 1 і 2 через редуктори 7 і 8 зв'язані синусно-косинусні датчики 5 і 6 кутового положення клинів, в якості яких через редуктори 7 і 8 можна, наприклад, використовувати обертові синуснокосинусні трансформатори (СКТО). В цьому випадку, співвідношення редукторної передачі між обертанням клинів і СКТО має бути 1:1. Але можливе використання і інших типів СКТО, які потребують іншого передаточного числа. Причому, датчики 5 і 6 зв'язані з клинами 1 і 2 таким чином, що при орієнтації клинів вершинами донизу, сигнали з косинусних обмоток цих датчиків дорівнюють нулю, а сигнали з синусних обмоток - максимальні. В цьому випадку, кожний з оптичних клинів 1 і 2 може бути охарактеризований деяким вектором (див. Фіг.2), напрямок якого співпадає з напрямком відхилення оптичного променя даним клином, а його довжина відповідає величині відхилення променя. Напрямок відхилення променя знаходять кутовим положенням оптичнoго клина, тобто, ви хідними сигналами датчиків 5 і 6, відповідно, sinj1, cos j1i sinj2, cos j2 які визначають положення клинів відповідно до початку відліку. Позначимо через x1i x2 максимальну напругу з синусних і косинусних обмоток датчиків кутового положення 5 і 6. Через a1i a 2 позначимо напругу синусних обмоток, а через b1ib 2 - напругу косинусних обмоток датчиків кутового положення. Тоді можна отримати вираз залежності сигналів з датчиків кутового положення клинів від кута їх повороту: a1 = x1 sin j1; a 2 = x2 sin j2 ; b1 = x1 cos j1; b2 = x2 cos j2 ; де j1i j2 - кути розвороту оптичних клинів 1 і 2. Оскільки датчики кутового положення 5 і 6 механічно пов'язані з оптичними клинами 1 і 2, то проекція a i b сумарного вектора (див. Фіг.2), що відповідає відхиленню променя обома клинами за віссю курсу (К) і віссю тангажу (Т), буде пропорціональна сумі напруг з синусних і косинусних обмоток датчиків кутового положення 5 і 6. Пий цьому : ìa = a1 + a 2 = x1 sinj1 + x2 sinj2; (1) í îb = b1 + b 2 = x1 cos j1 + x2 cos j2. Про диференціюємо обидва рівняння у виразі (1): ì¶a = x1cos j1¶j + x2 cos j2¶j; (2) í î¶b = -x1 sinj1¶j - x2 sinj2¶j. Оскільки обидва оптичні клини 1 і 2 і датчики кутового положення 5 і 6 однакові, то x1 = x2 = x. Вирішуємо систему рівнянь (2) відносно ¶j1 i ¶j2 : 7 ì ¶j1 / ¶t = (¶a sin j 2 + ¶b cos j 2 ) / x1 sin(j 2 - j1); í î ¶j 2 / ¶ t = (¶a sin j1 + ¶b cos j1) / x1 sin(j2 - j1). 84755 (3) Якщо прийняти початкову орієнтацію вершин оптичних клинів під кутом 90°, то sin(j2 - j1) = 1 і система рівнянь (3) приймає вигляд: ìDj1 = (Da sinj2 + D b cos j2 ) / x; (4) í î Dj2 = (D a sinj1 + Db cos j1) / x. Система рівнянь (4) являє собою математичний вираз, в якому дається співвідношення приросту кутів повороту клинів від помилок кутового відхилення оптичної вісі за двома взаємно перпендикулярними напрямками, наприклад, за курсом і тангажем. Для того, щоб привести в рух оптичні клини 1 і 2 зменшити помилки відхилення оптичної вісі від заданого напрямку до нуля, використовуються приводи керування клинів 3 і 4. Перетворення помилок відхилення променя за курсом D К і тангажем D Т в сигнали керування приводів 3, 4 клинів 1, 2 відповідно, з системою рівнянь (4), в клиновому оптичному компенсаторі, що заявляється, забезпечують два АЗП 19, 20, чотири ПАС 15, 16, 17, 18 і два суматори 13 і 14 (див. Фіг.1). АЗП 19 формує сигнал відхилення променя від заданого напрямку за курсом ДК, який відповідає значенню До, а АЗП 20 - за тангажем DT , який відповідає значенню Db . Чотири ПАС 15, 16, 17, 18 забезпечують формування вихідних сигналів, пропорційних значенням DKsinj2, DTcosj2, DКsinj1 DТсosj1, а вихідні сигнали суматорів 13 і 14 визначають величину кутів Dj1 і Dj 2, на які потрібно повернути оптичні клини 1, 2 відносно початкової орієнтації. Керування розворотом клинів 1 і 2 відносно один одного виконується за допомогою приводів керування 3 і 5. Для забезпечення високої точності передачі керуючих впливів, приводи керування 3 і 5 являють собою електроприводи постійного струму, які дозволяють забезпечити високу швидкість відпрацювання керуючих сигналів і плавність обертання двигуна, а також характеризуються мінімальними масогабаритними характеристиками. Тому, для перетворення вихідних сигналів змінного струму суматорів 13 і 14 в сигнали постійного струму, в клиновий оптичний компенсатор, що заявляється, введені демодулятори 11 і 12. З виходів демодуляторів 11 і 12 керуючі сигнали Dj1 і Dj2 у вигляді сигналів постійного струму через підсилювачі 9 і 10, які забезпечують підсилення керуючих сигналів до необхідного рівня, поступають на обмотки двигунів приводів керування 3, 4. Двигуни приводів керування 3, 4, з'єднані за допомогою однакових редукторів 7 і 8 з оптичними клинами 1, 2, приводять клини 1, 2 до обертання пропорційно величинам керуючих сигналів Dj1 і Dj 2, в результаті чого оптична вісь променя відхилюється таким чином, що забезпечується компенсація помилок відхилення від заданого напрямку за обома координатами. Таким чином, оптична вісь клинового оптичного компенсатора утримується точно за заданим напрямком з заданою точністю її відхилення. 8 Діапазон неузгоджень компенсації за допомогою оптичних клинів 1 і 2, відповідно до виразу (4), визначається з одного боку довжиною вектора x кожного клина, а з іншого боку - допустимими кутами розвороту клинів, які мають задовольнити умови sin(j2-j1) »1. Для забезпечення нормального функціонування приводів клинів, достатньо, щоб sin(j2-j1) »0,5. Таким чином, можна визначити зону можливих компенсацій неузгоджень напрямку променя за курсом і тангажем, яка зображена на Фіг.2 пунктирною лінією і відповідає інтервалам DК (a) і DТ (b). Вибір довжини вектора x клинів робиться на основі заданих значень максимального неузгодження, яке необхідно усун ути за допомогою клинового оптичного компенсатора. Практично для узгодження оптичних каналів оптико-електронних приладів ці кути складають одиниці кутови х хвилин і тому реальна довжина векторів x клинів, що відповідає абсолютній величині відхилення оптичної вісі променя даним клином, є незначною. Це дозволяє зробити клини мінімальної товщини (із-за малої клиновидності), що зменшує габарити і спрощує конструкцію клинового оптичного компенсатора. Наявність відхилення оптичної вісі променя, пов'язаного з початковою орієнтацією оптичних клинів під взаємним кутом 90°, компенсується шляхом установки початкового відхилення вісі променя і відповідного оптичного каналу під кутом, приймаючим до уваги наявність початкового кута відхилення. Технічне рішення, що заявляється, реалізовано в оптико-електронному прицілі 1К118 у складі автоматичного пристрою узгодження оптичної вісі випромінювання лазерно-променевого каналу керування (ЛПКК) з оптичною віссю візирного каналу прицілювання. У випадку, якщо ось випромінювання ЛПКК при проходженні через пристрій узгодження каналів (ПУК) прицілу відхилюється від заданого напрямку, то формуються сигнали, пропорційні величині неузгодження напрямку вісі випромінювання ЛПКК і оптичної вісі візирного каналу за тангажем DT і курсом DК. Сигнали неузгодження DT і DК, сформовані в ПУК, використовуються в якості початкових сигналів помилки відхилення клинового оптичного компенсатора, що заявляється, розворот клинів якого змінює напрямок вісі випромінювання ЛПКК прицілу, забезпечуючи узгодження з оптичною віссю візирного каналу. Використання клинового оптичного компенсатора, що заявляється, у складі встроєного в приціл 1К118 приладу узгодження каналів, дозволило забезпечити автоматичне узгодження оптичної вісі ЛПКК з візирним каналом прицілу з похибкою до ±10 кут. сек. і підтвердила досягнення технічного результату пропонованого клинового оптичного компенсатора і його переваги у порівнянні з прототипом. 9 Комп’ютерна в ерстка В. Клюкін 84755 Підписне 10 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюWedge optical compensator
Автори англійськоюHordienko Valentyn Ivanovych, Khomchenko Oleksii Yakovych, Mazurin Ihor Volodymyrovych, Serbin Ivan Semenovych, Zamosenchuk Volodymyr Mykolaiovych, Sukhomlinov Petro Opanasovych
Назва патенту російськоюКлиновой оптический компенсатор
Автори російськоюГордиенко Валентин Иванович, Хомченко Алексей Яковлевич, Мазурин Игорь Владимирович, Сербин Иван Семенович, Замосенчук Владимир Николаевич, Сухомлинов Петр Афанасьевич
МПК / Мітки
МПК: G02B 27/00
Мітки: компенсатор, клиновий, оптичний
Код посилання
<a href="https://ua.patents.su/5-84755-klinovijj-optichnijj-kompensator.html" target="_blank" rel="follow" title="База патентів України">Клиновий оптичний компенсатор</a>
Оптичний рідинний компенсатор і спосіб виготовлення оптичного рідинного компенсатора
Номер патенту: 15667
Опубліковано: 30.06.1997
Автори: Крячок Сергій Дмитрович, Боровий Валентин Олександрович, Бурачек Всеволод Германович
МПК: G01C 5/00, G01C 15/10
Мітки: рідинний, рідинного, оптичний, компенсатора, спосіб, виготовлення, оптичного, компенсатор
Формула / Реферат:
(57) 1. Оптический жидкостный компенсатор, содержащий корпус, две частично заполненные прозрачной жидкостью компенсационные камеры, выполненные в виде верхней, средней и нижней горизонтальных прозрачных плоскопараллельных пластин и двух оптических соединительных элементов, последовательно закрепленных между плоскопараллельными пластинами, отличающийся тем, что плоскости главных сечений остаточных клиньев средней и нижней плоскопараллельных...
Пристрій для множення
Номер патенту: 37026
Опубліковано: 16.04.2001
Автори: Білан Степан Миколайович, Кіров Максим Володимирович
МПК: G06G 7/16
Текст:
...схеми керування, другий вихід котрої підключений до другого керуючого входу першого суматора та до другого керуючого входу др угого суматора, а третій вихід схеми керу вання підключений до першого керуючого входу першого суматора та до першого керуючого входу другого суматора, а інформаційній вихід лічильника підключений до першого та другого інформаційного входів першого суматора та до першого та другого інформаційних входів др угого...
Растровий оптичний мікроскоп
Номер патенту: 50161
Опубліковано: 15.10.2002
Автори: Шклярський Володимир Іванович, Туркінов Геннадій Олександрович
МПК: H04N 5/202, G06F 3/153
Мітки: растровий, оптичний, мікроскоп
Формула / Реферат:
Растровий оптичний мікроскоп, який містить послідовно з'єднані проекційну електронно-променеву трубку, об'єктив, за яким встановлений досліджуваний об'єкт, фотоелектронний помножувач, попередній підсилювач, а також перший відеопідсилювач, під'єднаний до керуючого електрода індикаторної електронно-променевої трубки, котушку відхилення по координаті Х індикаторної електронно-променевої трубки, під'єднану до генератора рядкової розгортки,...
Скануючий оптичний мікроскоп
Номер патенту: 50162
Опубліковано: 15.10.2002
Автори: Грицьків Зенон Дмитрович, Шклярський Володимир Іванович, Педан Анатолій Дмитрович, Туркінов Геннадій Олександрович
МПК: G06F 3/153, H04N 5/272
Мітки: мікроскоп, скануючий, оптичний
Формула / Реферат:
Скануючий оптичний мікроскоп, який містить послідовно з'єднані проекційну електронно-променеву трубку, об’єктив, за яким встановлено досліджуваний об’єкт, фотоелектронний помножувач, попередній підсилювач, перший відеопідсилювач, вихід якого під’єднаний до керуючого електрода індикаторної електронно-променевої трубки, а також послідовно з’єднані генератор рядкової розгортки та котушки відхилення по координаті Х індикаторної...
Оптичний біостимулятор на поляризованому випромінюванні
Номер патенту: 17980
Опубліковано: 16.10.2006
Автори: Корчин Ігор Олександрович, Гуляр Сергій Олександрович
МПК: A61N 5/00, A61N 5/06, G02F 1/01
Мітки: біостимулятор, оптичний, випромінюванні, поляризованому
Формула / Реферат:
1. Оптичний біостимулятор на поляризованому випромінюванні, що містить корпус, у якому послідовно по ходу випромінювання розташовані джерело світла та поляризаційний елемент, а також електронний випрямляч, вихід якого підключений до джерела світла, а вхід до електромережі, який відрізняється тим, що оптичний стимулятор додатково оснащений блоком керування живленням джерела світла, який складається з комутатора, генератора керувальних...
Попередній патент: Спосіб повітряного інерційно-гравітаційного сепарування сипучих матеріалів і пристрій для його здійснення
Наступний патент: Пристрій для транспортування і очистки коренебульбоплодів
Випадковий патент: Спосіб корекції простатичного больового синдрому у хворих на хронічний простатит на тлі метаболічного синдрому